Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке ракетных комплексов, например, с носителями на земле, в которых применяются лучевые системы теленаведения.
В системах теленаведения по лучу формируют пространственную структуру электромагнитного поля, создаваемую передающим устройством с пункта управления, при этом параметры поля управления функционально связаны с координатами соответствующих точек, например в системе декартовых координат "Z0Y", где "Z" - величина координаты по курсу, "Y" - величина координаты по тангажу, "0" - начало координат, совпадающее с центром поля управления и являющееся точкой прицеливания (наведения). Формирование поля управления осуществляют, например, сканированием диаграммы направленности в двух взаимно перпендикулярных направлениях по "Z" и "Y" соответственно, при этом пропорционально углу сканирования изменяют величину команд. Таким образом, в плоскости "Z0Y" поле имеет по краям единичные (с разными знаками, соответственно) значения команд, а в центре - нулевое. Бортовая аппаратура, расположенная на ракете, измеряет параметры электромагнитного поля, изменяемые по закону время-импульсной (ВИМ), или кодово-импульсной (КИМ), или широтно-импульсной модуляции (ШИМ) и т.д., а затем определяет свое положение относительно "0", при этом на ракете вырабатывают команды управления таким образом, чтобы заставить ее занять определенное положение относительно заданного электромагнитного поля.
Известны способ управления ракетой и система наведения ракеты для его реализации [Патент РФ №2241950, МКИ7 F 41 G 7/24, F 42 B 15/01]. Способ управления ракетой заключается в том, что преобразуют электромагнитное излучение с пункта управления в электрические сигналы координат ракеты по курсу и тангажу, формируют команды управления ракетой по курсу и тангажу, причем команду управления по курсу формируют из электрического сигнала координаты по курсу, а команду управления по тангажу формируют в виде суммарной величины, включающей дополнительную команду, пропорциональную величине провисания ракеты, электрический сигнал координаты по тангажу и интегрированный электрический сигнал координаты по тангажу.
Система наведения ракеты содержит аппаратуру пункта управления, а на ракете - последовательно включенные приемник и блок выделения координат, выход по курсу которого соединен с первым входом автопилота, при этом вход приемника связан с аппаратурой пункта управления, а также сумматор, блок компенсации, интегратор и блок включения интегратора, связанный с управляющим входом интегратора, сигнальный вход интегратора соединен с выходом блока выделения координат по тангажу, подключенного к первому входу сумматора, второй вход которого соединен с выходом интегратора, а третий - с блоком компенсации, при этом вход сумматора соединен со вторым входом автопилота.
Сумматор (трехвходовой), блок компенсации, интегратор и блок включения интегратора со своими связями можно представить как устройство формирования команды по тангажу, которое может входить в автопилот [Основы радиоуправления /Под ред. Вейцеля В.А. и Типугина В.Н. М.: Советское радио, 1973 г., стр.276-277, рис.5.3, стр.49, рис.1.27].
Эти известные способ управления ракетой и система наведения ракеты, основанная на нем, предназначены для повышения точности наведения ракеты на цель в канале тангажа за счет коррекции на борту ракеты величины команды управления, компенсирующей провисание ракеты под действием силы тяжести, т.е. внешнего возмущения одного знака (при траектории полета, например, параллельной поверхности земли).
Однако в канале курса действует возмущение обоих знаков, при этом на перемещение точки прицеливания прибора наведения (аппаратуры пункта управления) в горизонтальной плоскости, отслеживающей соответствующее передвижение цели, накладывается ограничение на максимальную величину угловой скорости перемещения точки прицеливания, т.к. ракета может "не успеть" отследить перемещение поля управления и "вывалиться" из него, что ухудшает точность наведения по каналу курса.
Увеличение крутизны пеленгационной характеристики (зависимости величины напряжения на выходе блока выделения координат от величины отклонения ракеты от центра поля управления) для компенсации этого возмущения не представляется возможным, т.к. при этом ухудшаются динамические характеристики контура управления, что может привести к выходу (выбросу) ракеты из луча.
Следовательно, недостатком известных способа управления ракетой и системы наведения ракеты для его реализации является низкая точность наведения ракеты на цель за счет ошибки наведения в канале курса, обусловленной перемещением точки прицеливания, отслеживающей соответствующее перемещение цели.
Задачей настоящего изобретения (способа и устройства) является повышение точности наведения за счет коррекции на борту ракеты величины команды управления в канале курса.
Поставленная задача решается в способе управления ракетой за счет того, что преобразуют электромагнитное излучение с пункта управления в электрические сигналы координат ракеты по курсу и тангажу, из величин электрических сигналов координат формируют команды управления ракетой по курсу и тангажу, при этом интегрируют величину электрического сигнала координаты ракеты по курсу, а затем суммируют величину электрического сигнала координаты по курсу с ее интегрированной величиной и из суммарной величины формируют команду управления ракетой по курсу.
Система наведения ракеты, основанная на этом способе, содержит аппаратуру пункта управления, а на ракете - автопилот и последовательно соединенные приемник и блок выделения координат, при этом аппаратура пункта управления выполнена с возможностью связи с приемником, введены в канале курса сумматор, интегратор и блок включения интегратора, связанный с управляющим входом интегратора, сигнальный вход которого соединен с выходом блока выделения координат по курсу, подключенного к первому входу сумматора, второй вход которого соединен с выходом интегратора, при этом выход сумматора соединен с первым входом автопилота, второй вход которого соединен с выходом по тангажу блока выделения координат.
Заявленный способ реализуется следующим образом. После старта ракеты и встреливания ее в луч на борту ракеты преобразуют электромагнитное излучение поля управления, в котором находится ракета, в электрические сигналы координат ракеты по курсу "Z" и тангажу "Y". Из величин электрических сигналов координат формируют команды управления ракетой по курсу и тангажу, например, как в известном способе.
Интегрируют величину электрического сигнала координаты по курсу, например, после окончания переходного процесса после встреливания ракеты в луч. При этом выделяют ошибку, т.е. величину отклонения ракеты от "0" в горизонтальной плоскости, например, при "отставании" ракеты от центра поля управления при перемещении точки прицеливания вслед за целью, а затем суммируют электрический сигнал координаты по курсу (изменяемый с достаточно высокой скоростью, а значит и частотой) и интегрированный электрический сигнал координаты по курсу (изменяемый с меньшей скоростью, а значит и частотой), что не ухудшает динамические характеристики контура наведения.
Из суммарного электрического сигнала координаты по курсу и интегрированного электрического сигнала этой координаты формируют (в автопилоте) команду управления ракетой по курсу.
Предлагаемое изобретение поясняется структурной электрической схемой, приведенной на чертеже, где представлены: 1 - аппаратура пункта управления (АПУ), 2 - ракета (Р), 3 - приемник (П), 4 - блок выделения координат (БВК), 5 - блок включения интегратора (БВ), 6 - интегратор (И), 7 - сумматор (С), 8 - автопилот (А).
Приемник 3 (после ввода ракеты в луч) электромагнитным излучением связан с аппаратурой пункта управления 1. Выход приемника 3 подключен ко входу блока выделения координат 4, выход по тангажу "Y" которого соединен с первым входом автопилота 8. Блок включения интегратора 5 связан с управляющим входом интегратора 6, сигнальный вход интегратора 6 соединен с выходом блока выделения координат 4 по курсу "Z", подключенного к первому входу сумматора 7, второй вход которого соединен с выходом интегратора 6, при этом выход сумматора соединен со вторым входом автопилота 8.
Аппаратура пункта управления 1, приемник 3 и блок выделения координат 4 могут быть выполнены, как в известной системе наведения ракеты (патент РФ №2241950). Блок включения интегратора 5 и интегратор 6 могут быть выполнены, как аналогичные блоки, расположенные в канале тангажа (патент РФ №2241950). Сумматор 7 представляет собой обычный двухвходовой сумматор в аналоговом или цифровом исполнении соответственно. Автопилот 8 может быть выполнен, как в патенте РФ №2241950, при этом в его состав в канале тангажа может входить устройство формирования команды по тангажу (блок компенсации, интегратор и блок включения интегратора).
Заявленная система наведения ракеты работает следующим образом. Аппаратура пункта управления 1, расположенная, например, на земле, формирует поле управления, например, по закону ВИМ, при этом при изменении плоскости сканирования "Z" на "Y" меняют рабочие сигналы РС1 на РС2 (как в известном устройстве).
С момента старта ракеты 2 и до момента попадания ее в поле управления на выходах блока выделения координат 4 по обоим каналам формируются, например, нулевые значения координат (величины напряжений равны нулю). В момент попадания ракеты 2 в поле управления приемник 3 преобразует электромагнитное излучение в электрические импульсы, которые поступают на вход блока выделения координат 4. Этот блок выделяет по курсу "Z" и тангажу "Y" координаты (их электрические сигналы), которые соответственно по курсу "Z" через сумматор 7 поступают на первый вход автопилота 8, а по тангажу "Y" - на второй.
По окончании переходного процесса встреливания ракеты в луч (в поле управления) блок включения интегратора 5 включает интегратор 6, который интегрирует величину координаты "Z" и выделяет ошибку, т.е. величину отклонения ракеты от точки прицеливания "0" и подает ее на второй вход сумматора 7. Таким образом, на выходе сумматора 7 до конца полета формируют по курсу команду, которая обеспечивает управление ракетой 2 от пространственной структуры электромагнитного поля с выхода аппаратуры пункта управления 1, при этом на борту ракеты 2 дополнительно формируют добавочную команду, компенсирующую ошибку наведения.
Следовательно, в заявленном устройстве корректируют величину команды управления ракетой в канале курса при сохранении крутизны пеленгационной характеристики, что обеспечивает повышение точности наведения при сохранении динамических характеристик контура управления.
Таким образом, в способе управления ракетой за счет того, что интегрируют величину электрического сигнала координаты ракеты по курсу, а затем суммируют величину электрического сигнала координаты по курсу с ее интегрированной величиной и из суммарной величины формируют команду управления ракетой по курсу повышена точность наведения за счет коррекции на борту ракеты команды управления по курсу.
Введение в систему наведения ракеты в канале курса сумматора, интегратора и блока включения интегратора, связанного с управляющим входом интегратора, сигнальный вход которого соединен с выходом блока выделения координат по курсу, подключенного к первому входу сумматора, второй вход которого соединен с выходом интегратора, при этом выход сумматора соединен с первым входом автопилота, второй вход которого соединен с выходом по тангажу блока выделения координат, повысило точность наведения ракеты в канале курса за счет коррекции на борту ракеты команды управления ракеты по курсу.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241950C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241951C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2295691C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2291384C1 |
| СПОСОБ ВВОДА РАКЕТЫ В ЗОНУ ЛУЧА И КОМПЛЕКС ТЕЛЕУПРАВЛЯЕМОЙ В ЛУЧЕ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2257522C1 |
| СПОСОБ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ В ЛУЧЕ И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2421680C2 |
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2004 |
|
RU2280233C1 |
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2257523C1 |
| СПОСОБ КОНТРОЛЯ ЛУЧЕВОЙ СИСТЕМЫ ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2257526C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕОРИЕНТИРУЕМОЙ В ЛУЧЕ РАКЕТЫ И РАКЕТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2266509C1 |
Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке ракетных комплексов, например, с носителями на земле, в которых применяются лучевые системы наведения. Технический результат - повышение точности наведения за счет коррекции на борту ракеты величины команды управления в канале курса. Согласно изобретению в способе управления ракетой преобразуют электромагнитное излучение с пункта управления в электрические сигналы координат ракеты по курсу и тангажу, из величин электрических сигналов координат формируют команды управления ракетой по курсу и тангажу, интегрируют величину электрического сигнала координаты ракеты по курсу, а затем суммируют величину электрического сигнала координаты по курсу с ее интегрированной величиной и из суммарной величины формируют команду управления ракетой по курсу. Введение в систему наведения ракеты в канале курса сумматора, интегратора и блока включения интегратора повысило точность наведения ракеты в канале курса. 2 н.п. ф-лы, 1 ил.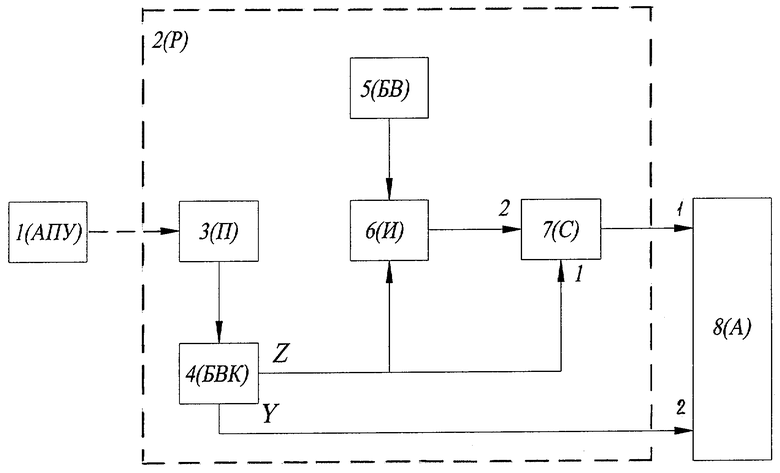
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241950C1 |
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |

