Изобретение относится к области общего машиностроения и может быть использовано в передаточных механизмах для преобразования вращательного движения в возвратно-поступательное и вращательное с заданными законами движения.
Известны кулачковые пространственные механизмы, превращающие вращательное движение в возвратно-поступательное с заданными законами движения (см. механизмы №№2874, 2875, 2876 И.И.Артоболевский. Механизмы в современной технике, том 5, стр.52-53, М.: Наука, 1981 г.).
В этих механизмах вращательное движение кулачков (конического, гиперболоидного) превращается в возвратно-поступательное движение толкателя в неподвижных направляющих, при этом продольная ось толкателя параллельна образующей поверхности конического кулачка или одной из образующих гиперболоида. Организовать одновременно с возвратно-поступательным и вращательное движение толкателя вокруг его продольной оси в таких механизмах невозможно.
Наиболее близким по технической сущности к изобретению является кулачковый пространственный механизм с неподвижным кулачком (см. механизм №2878 И.И.Артоболевский. Механизмы в современной технике, том 5, стр.54, М.: Наука, 1981 г.) Механизм состоит из цилиндрического кулачка, толкателя с роликом и вращающегося звена. Цилиндрический кулачок, имеющий паз, неподвижен. Толкатель несет на себе ролик, входящий в паз кулачка. Толкатель может двигаться в направляющей вращающегося звена, при вращении которого толкатель совершает сложное движение, состоящее из вращательного движения вокруг неподвижной оси цилиндрического кулачка и возвратно-поступательного вдоль направляющей вращающегося звена параллельно образующей цилиндрического кулачка.
Организовать дополнительное вращательное движение толкателя вокруг своей продольной оси в таком механизме невозможно.
Задачей настоящего изобретения является придание возвратно-поступательно движущемуся толкателю дополнительного вращательного движения вокруг своей продольной оси, параллельной образующей цилиндрического (конического, гиперболоидного) кулачка.
Решение технической задачи достигается тем, что в кулачковом пространственном механизме, содержащем неподвижный цилиндрический (конический, гиперболоидный) кулачок, вращающееся звено и толкатель с роликом, на кулачке установлено зубчатое колесо (сектор зубчатого колеса), вращающееся звено оснащено неподвижной штангой и шестерней, входящей в зацепление с зубчатым колесом, толкатель соединен с шестерней с помощью подвижного шпоночного (шлицевого, профильного) соединения, а с роликом через установленный на штанге (штангах) ползун.
Технический результат достигается тем, что в предлагаемом механизме шестерня, установленная во вращающемся звене, обкатывается по зубчатому колесу, закрепленному на неподвижном кулачке и придает с помощью подвижного шпоночного (шлицевого, профильного) соединения движущемуся возвратно-поступательно толкателю дополнительное вращательное движение, при этом толкатель вращается во втулках ползуна и вращающегося звена, а перемещается вдоль образующей кулачка вместе с ползуном, причем ползун движется по неподвижной штанге (штангах), установленной на вращающемся звене, а толкатель - во втулке вращающегося звена.
Сопоставительный анализ с прототипом показывает, что заявляемый механизм отличается конструктивным выполнением соединения толкателя с роликом (в прототипе ось ролика жестко соединена с толкателем) и оснащен дополнительно зубчатым колесом, шестерней, ползуном и штангой, что позволяет придать толкателю дополнительное вращательное движение вокруг его продольной оси. Таким образом, заявляемый механизм соответствует критерию "новизна".
Сравнение заявляемого решения не только с прототипом, но и с другими техническими решениями не выявило в них признаки, отличающие заявляемое решение от прототипа, что позволяет сделать вывод о соответствии критерию "существенные отличия".
Техническое решение поясняется чертежом.
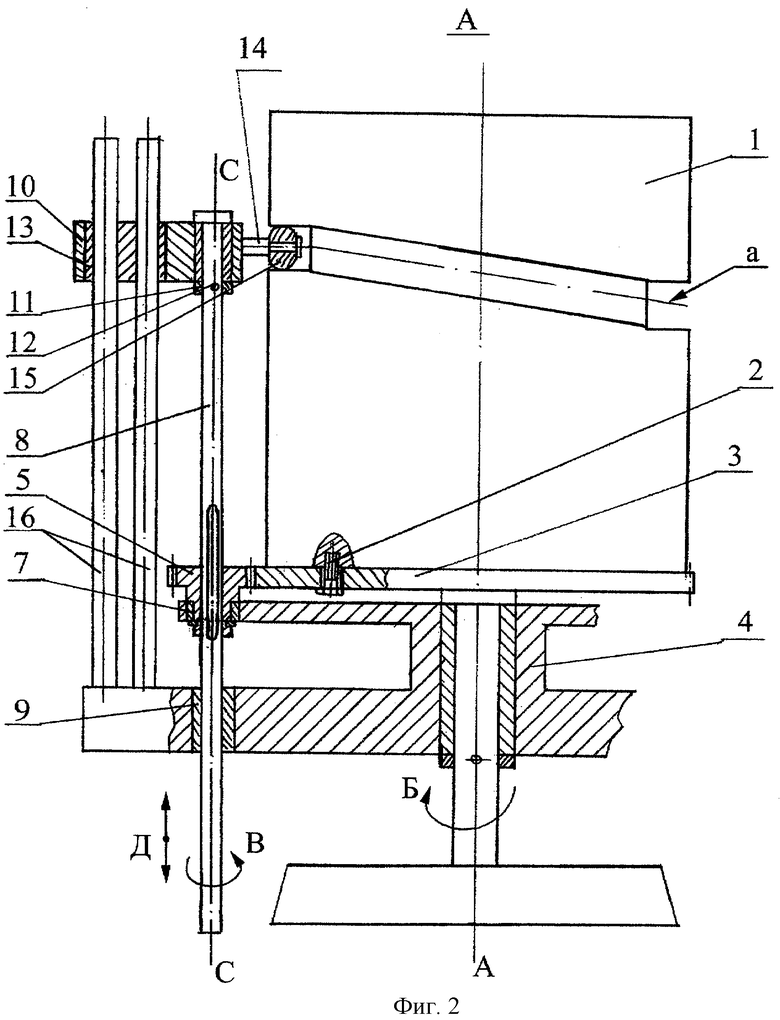
На фиг.1 изображен общий вид механизма.
На фиг.2 изображен вариант установки ползуна на двух штангах.
Механизм состоит из неподвижного кулачка 1 с пазом "а". На кулачке 1 с помощью болтов 2 закреплено зубчатое колесо (сектор зубчатого колеса) 3. На оси А-А кулачка 1 установлено вращающееся звено 4, на котором смонтированы шестерня 5 и штанга 6. Штанга 6 установлена на звене 4 неподвижно, а шестерня 5 с возможностью вращения во втулке 7 звена 4. Толкатель 8 проходит через втулку 9 звена 4, шестерню 5 и закреплен в ползуне 10 с помощью кольца 11 и штифта 12. Соединение толкателя 8 с шестерней 5 неподвижное шпоночное (шлицевое или профильное), а с ползуном 10 - с возможностью вращения вокруг оси С-С во втулках 13 и 7. С ползуном 10 жестко соединена ось 14 ролика 15. Сам ползун 10 с помощью шпоночного (шлицевого, профильного) соединения смонтирован на штанге 6. Возможны и иные способы установки ползуна 10, например на двух параллельных друг другу гладких штангах 16. (см. фиг.2).
Механизм работает следующим образом.
При вращении звена 4 по направлению Б вокруг оси А-А кулачка 1 толкатель 8 вращается вместе с ним, при этом ролик 15, взаимодействуя с пазом "а" кулачка 1, придает ползуну 10, а следовательно, и соединенному с ним толкателю 8 возвратно-поступательное движение по направлению Д, параллельному образующей цилиндрического (конического, гиперболоидного) кулачка 1.
При этом толкатель 8 перемещается во втулке 9 и шестерни 5 звена 4, а ползун 10 по штанге 6. Т.к. шестерня 5 находится в зацеплении с зубчатым колесом 3, соединенным с неподвижным кулачком 1, то она, обкатываясь вокруг колеса 3, начинает вращаться вокруг оси С-С толкателя 8 по направлению В во втулке 7 звена 4. Поскольку толкатель 8 соединен с шестерней 5 с помощью подвижного шпоночного (шлицевого, профильного) соединения, то толкатель 8 не только перемещается по направлению Д, но также и вращается по направлению В, во втулке 7 звена 4 и втулке 13 ползуна 10.
Таким образом, оснащение кулачка 1 зубчатым колесом 3, вращающегося звена 4 - неподвижной штангой 6 и шестерней 5, входящей в зацепление с зубчатым колесом 3, и соединение толкателя 8 с шестерней 5 с помощью шпоночного (шлицевого, профильного) соединения, а с роликом 15 через установленный на штанге 6 ползун 10 позволяет придать толкателю 8 дополнительное вращательное движение вокруг своей продольной оси.
Если необходимо получить вращение толкателя 8 на участке, меньшем 360°, то вместо зубчатого колеса 3 устанавливается сектор зубчатого колеса с необходимым центральным углом.
Изобретение относится к машиностроению, а именно к механизмам для преобразования вращательного движения в возвратно-поступательное и вращательное с заданными законами движения. Кулачковый пространственный механизм состоит из неподвижного цилиндрического, или конического, или гиперболоидного кулачка, вращающегося звена и толкателя с роликом. На кулачке установлено зубчатое колесо или сектор зубчатого колеса. Вращающееся звено оснащено неподвижной штангой или штангами и шестерней, входящей в зацепление с зубчатым колесом. Толкатель связан с шестерней с помощью подвижного шпоночного, или шлицевого, или профильного соединения. С роликом толкатель связан через установленный на штанге или штангах ползун. Технический результат заключается в придании возвратно-поступательно движущемуся толкателю дополнительного вращательного движения вокруг своей продольной оси. 2 ил.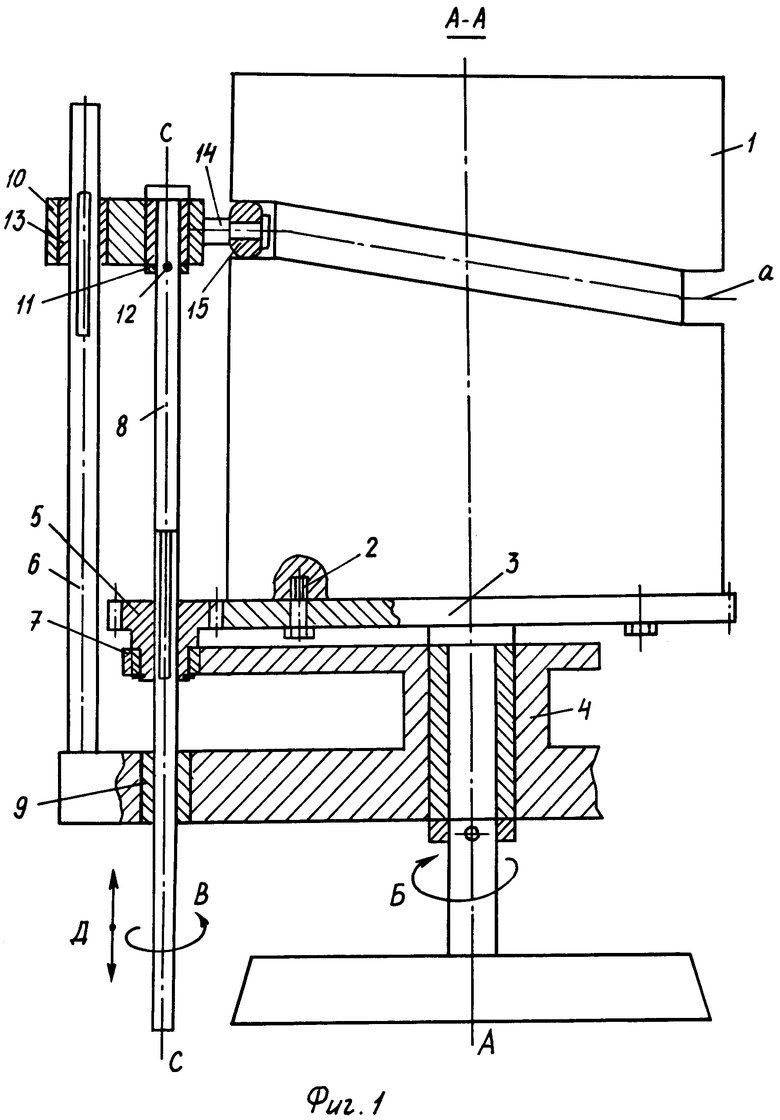
Кулачковый пространственный механизм, состоящий из неподвижного цилиндрического, или конического, или гиперболоидного кулачка, вращающегося звена и толкателя с роликом, отличающийся тем, что на кулачке установлено зубчатое колесо или сектор зубчатого колеса, вращающееся звено оснащено неподвижной штангой или штангами и шестерней, входящей в зацепление с зубчатым колесом, толкатель связан с шестерней с помощью подвижного шпоночного, или шлицевого, или профильного соединения, а с роликом - через установленный на штанге или штангах ползун.
| АРТОБОЛЕВСКИЙ И.И | |||
| Механизмы в современной технике | |||
| - М.: Наука, 1981, том 5, с.54, фиг | |||
| КОРОБКА ДЛЯ СПИЧЕК | 1916 |
|
SU2878A1 |
| Устройство для электроэрозионного резания металлов | 1980 |
|
SU933355A1 |
| JP 5196558 A, 06.08.1993 | |||
| US 4535642 А, 20.08.1985 | |||
| Способ преобразования движения и кулачковый механизм для его осуществления | 1988 |
|
SU1566132A1 |

