Изобретение относится к способу и системам управления летательными аппаратами и может быть использовано для измерения координат (по тангажу и курсу), сформированных посылками импульсов в оптических линиях систем теленаведения (управление по лучу) с время-импульсной (ВИМ) или кодово-импульсной (КИМ) модуляцией поднесущего колебания.
В системах теленаведения формируется пространственная структура электромагнитного поля, центр поля управления поперечной плоскости Y-Z совмещается с целью, а все пространство поля подвергается импульсной засветке с поднесущей модуляцией (ВИМ или КИМ), в которой закодирована информация о координатах Y (тангаж) и Z (курс). Засветка поля выполняется в сканирующем режиме в двух взаимно перпендикулярных направлениях с чередованием сканирования по координатам Y и Z. Бортовая аппаратура управления, находящаяся в снаряде, производит обработку параметров электромагнитного поля в точке нахождения снаряда и вычисляет величину отклонения (координаты Y и Z) снаряда от центра поля управления.
На основании полученных данных решается задача наведения на цель.
За счет сканирования поля управления лучом с определенной диаграммой направленности с выхода приемника бортовой аппаратуры формируется амплитудно-модулированный сигнал (посылка) с длительностью, соответствующей интервалу времени прохождения луча через приемник.
Известны способ измерения координат и устройство, реализующее данный способ (Патент РФ №2223514). Способ измерения координат заключается в том, что формируют поле управления, путем сканирования диаграммы направленности электромагнитного излучения поочередно в двух взаимно перпендикулярных направлениях по тангажу и курсу соответственно относительно начала координат, совпадающего с центром поля управления, изменяя параметры электромагнитного поля, преобразуют электромагнитное излучение в посылки импульсов с ВИМ или КИМ и декодируют их, выдавая при этом значения координат по тангажу и курсу, при этом значения координат по тангажу и по курсу разнесены во времени и измеряются аналогично, фиксируют первое значение каждой координаты, соответствующее при сканировании началу момента облучения устройства измерения координат, а затем фиксируют каждое текущее значение координаты с заменой его на последующее до конца пачки импульсов и определяют среднее арифметическое значение каждой координаты для первого и каждого текущего значений координат.
Устройство, реализирующее этот способ, содержит последовательно соединенные приемник электромагнитного излучения и аппаратуру разделения каналов, а также аппаратуру декодирования, выполненную в виде идентичных каналов по курсу и тангажу, синхронизатор и схему установки в исходное состояние, каждый из каналов аппаратуры декодирования содержит преобразователь время-код, формирователь сигнала записи, два регистра и сумматор.
Недостатком известного способа и устройства является снижение устойчивости определения одной из координат при повышенном соотношении мощностей посылок соответствующего канала прибора управления, формирующего электромагнитное поле.
Наиболее близким по технической сущности к предлагаемому изобретению ("Основы радиоуправления", под редакцией Вейцеля В.А. и Типугина В.Н., Москва, "Советское радио", 1973, стр.272-278, 246-251, рис.4.28.) является способ измерения координат, заключающийся в том, что формируют поле управления, путем сканирования диаграммы направленности электромагнитного излучения поочередно в двух взаимно перпендикулярных направлениях по тангажу и курсу соответственно относительно начала координат, совпадающего с центром поля управления, изменяя параметры электромагнитного поля, преобразуют электромагнитное излучение в посылки импульсов с ВИМ или КИМ, производят нормирование амплитудно-модулированного электрического сигнала за счет усиления с автоматической регулировкой (АРУ), выделяют импульсы по заданному уровню и декодируют их, выдавая при этом значения координат по тангажу и курсу, при этом значения координат по тангажу и по курсу разнесены во времени и измеряются аналогично.
Устройство, реализующее этот способ, содержит последовательно включенные приемник, состоящий из последовательно соединенных преобразователя электромагнитного излучения и усилителя с АРУ на основе пикового детектора, компаратор и дешифратор. Принцип усиления сигнала в известном устройстве основан на предварительном нормировании посылок за счет установки уровня усиления обратно пропорционально амплитуде посылок, которая измеряется при помощи пикового детектора. Дальнейшее выделение импульсного сигнала выполняется компаратором на уровне порога с фиксированной привязкой к уровню предварительной нормировки.
В данном способе и устройстве амплитуда посылки с выхода приемника зависит от мощности соответствующего канала прибора управления, формирующего электромагнитное поле, дальности от прибора управления до снаряда, среды распространения сигнала и т.д. За счет указанных факторов возможно высокое соотношение амплитуд между посылками тангажа и курса. Поскольку уровень усиления определяется пиковым детектором, то усиление сигнала будет определяться по посылке с большей амплитудой, что может привести к потере информации, содержащейся в посылке с меньшей амплитудой, вследствие недостаточного уровня сигнала на входе компаратора. Следовательно, недостатком известного способа и устройства является снижение устойчивости определения одной из координат при повышенном соотношении мощностей посылок с разными координатами.
Задачей предлагаемого изобретения (способа и устройства) является повышение устойчивости и точности измерения координат при высоких соотношениях мощностей посылок тангажа и курса в оптической линии за счет введения контура дополнительного усиления.
Поставленная задача решается за счет того, что в способе измерения координат летательного аппарата в системе теленаведения по лучу, заключающемся в том, что с пункта управления в направлении цели формируют поле управления путем сканирования луча поочередно в двух взаимно перпендикулярных направлениях по тангажу и курсу соответственно, кодируют луч последовательностью парных импульсов, содержащих информацию о принадлежности луча тангажному или курсовому каналам, а также о величине и направлении отклонения луча по тангажу или курсу относительно начала координат, совпадающего с центром поля управления, осуществляют последовательный прием летательным аппаратом тангажных и курсовых посылок, представляющих собой несколько пар импульсов, модулированных по амплитуде, длительность которых соответствует времени прохождения луча через летательный аппарат, и преобразуют излучение в электрический сигнал, нормируют амплитудно-модулированный сигнал за счет автоматической регулировки усиления, выделяют импульсы по заданному уровню и декодируют их, выдавая значения координат по тангажу и курсу, фиксируют отсутствие посылок тангажа или курса и повышают коэффициент усиления до появления отсутствующей посылки.
Таким образом, способ решения поставленной задачи заключается в управляемом повышении коэффициента усиления при отсутствии одной из посылок (тангажа или курса).
Устройство измерения координат летательного аппарата в системе теленаведения по лучу, реализующее указанный способ, содержит последовательно соединенные приемник, состоящий из последовательно соединенных преобразователя электромагнитного излучения и усилителя и пикового детектора, вход которого подключен к выходу усилителя, компаратор и дешифратор, сумматор, первый вход которого подключен к выходу пикового детектора, а его выход - ко второму входу усилителя, таймер, первый и второй входы которого подключены соответственно к первому и второму выходам тангажа и курса дешифратора, и интегратор дополнительного усиления, включающий реверсивный счетчик, цифровой компаратор, первые входы которых подключены к выходу таймера, а выход реверсивного счетчика подключен ко вторым входам сумматора и цифрового компаратора, регистр, выход которого подключен к третьему входу цифрового компаратора, и логическая схема "И", первый и второй входы которой подключены соответственно к выходу цифрового компаратора и к третьему выходу дешифратора, а ее выход - ко второму входу реверсивного счетчика
Предлагаемое устройство поясняется графическими материалами (фиг.1 и фиг.2).
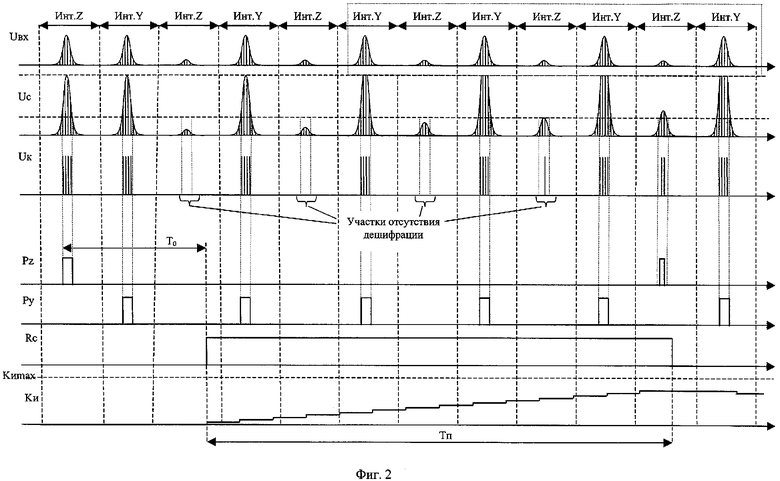
На фиг.1 приведена структурная электрическая схема устройства измерения координат, где представлены: 1 - приемник, 2 - преобразователь электромагнитного излучения, 3 - усилитель, 4 - пиковый детектор, 5 - компаратор, 6 - дешифратор, 7 - сумматор, 8 - интегратор дополнительного усиления, 9 - реверсивный счетчик, 10 - регистр, 11 - таймер, 12 - логическая схема "И", 13 - цифровой компаратор.
На фиг.2 приведены эпюры сигналов, где представлены: UBX - сигнал с выхода преобразователя электромагнитного излучения 2, UC - сигнал с выхода усилителя 3, UК - сигнал с выхода компаратора 5, PY, PZ - сигналы признака посылки по тангажу и курсу дешифратора 6, RC - сигнал с выхода таймера 11, КИ - сигнал с выхода реверсивного счетчика 9, ТO - максимально допустимый интервал отсутствия сигнала.
Устройство измерения координат работает следующим образом.
При боевой работе наводчик с пункта управления, наблюдая в окуляр визира, производит обнаружение и выбор цели и производит пуск летательного аппарата. При этом с пусковой установки в направлении выстрела формируют поле управления. Луч при перемещении в поле управления по тангажу и курсу засвечивает (при совмещении луча и летательного аппарата) приемник 1 летательного аппарата.
Преобразователь электромагнитного излучения 2 преобразует электромагнитное излучение, передаваемое по оптической линии связи, в электрические импульсы. Сигнал UBX (см. фиг.2) с выхода преобразователя электромагнитного излучения 2 представляет собой амплитудно-модулированный сигнал (посылка), представляющий собой, например, несколько пар импульсов. Обычно посылка может содержать от двух пар до нескольких десятков. Длительность между импульсами в парах - признак принадлежности сигнала каналу тангажа Y либо каналу курса Z (например, длительность между импульсами в парах в посылке при сканировании луча по тангажу больше, чем длительность между импульсами в парах в посылке при сканировании луча по курсу), а расстояние между соседними парами - величина координат (расстояние между соседними парами в посылках тангажа и курса при отклонении луча от центра поля управления к одному из краев линейно увеличивается, а к другому краю линейно уменьшается). Причем центру поля управления соответствует нулевое значение координат, по краям поля управления - максимальные значение координат (с разными знаками соответственно). Далее сигнал поступает на усилитель 3 с автоматической регулировкой, который предварительно нормирует посылки за счет установки уровня усиления обратно пропорционально амплитуде посылок, измеряемой с помощью пикового детектора 4.
Сигнал UC (см. фиг.2) с выхода усилителя поступает на компаратор 5, который выделяет импульсный сигнал на уровне порога с фиксированной привязкой к уровню предварительной нормировки. Нормированный по амплитуде сигнал UК (см. фиг.2) с выхода компаратора поступает на вход дешифратора 6.
Дешифратор производит разделение сигналов по курсу и тангажу и формирует величину координаты Y и Z, соответствующей середине посылки импульсов. Сигналы признака посылки PY и PZ (см. фиг.2) с выхода дешифратора поступают на входы таймера 11.
Таймер 11 выполняет функцию отсчета максимально допустимого интервала отсутствия сигнала. До момента достижения значения ТO выход таймера находится в состоянии лог. "0", с момента ТO (при отсутствии сигнала по курсу) выход таймера переходит в состояние лог."1". Сброс таймера в состояние лог. "0" производится последовательно следующими признаками посылок тангажа и курса, поступающими с выхода дешифратора 6. Сигнал превышения времени ожидания посылки с выхода таймера поступает на интегратор дополнительного усиления 8, включающий элементы 9, 10, 12 и 13, и определяет направление счета реверсивного счетчика 9. Лог. "0" сигнала с выхода схемы 11 соответствует прямому направлению счета (на увеличение выходного сигнала). Выходной сигнал реверсивного счетчика, поступающий на второй вход сумматора 8, задает поправку дополнительного усиления, которая, в свою очередь, суммируется с основным сигналом усиления, поступающим с пикового детектора 4 на первый вход сумматора 7. Результирующий сигнал с выхода сумматора поступает на второй вход усилителя 3. Элементы 9, 10, 12, 13 интегратора 8 выполняют функцию ограничения выходного значения счетчика 9 на уровнях 0 и КИ max за счет блокирования тактовой частоты FT. Сигнал блокирования вырабатывается компаратором 13 при достижении сигнала КИ значений КИ max и 0 в зависимости от направления счета - при достижении значения 0 в обратном направлении счета и при достижении значения КИ max в прямом направлении счета. Значение КИ max задает максимальное значение дополнительной поправки усиления и хранится в регистре 10. Ограничение дополнительной поправки необходимо для продолжения дешифрации одного из типов посылок в случае полного пропадания посылок второго типа, т.к. в противном случае усиление сигнала в процессе поиска происходит до уровня шумов, что приводит к потере сигнала.
Временная диаграмма работы схемы приведена на фиг.2. При одинаковой амплитуде посылок признаки посылок PY и PZ следуют постоянно и периодически устанавливают таймер в нулевое состояние. Сигнал RC с выхода таймера остается в неактивном нулевом состоянии и определяет направление счета счетчика как обратное. Сигнал КИ с выхода счетчика достигает нулевого состояния за счет срабатывания компаратора на уровне кода 0, при этом дальнейшее изменение сигнала блокируется за счет срабатывания компаратора на уровне кода 0. Таким образом, величина поправочного усиления КИ при устойчивом состоянии входного сигнала равна 0, т.е. схема дополнительного усиления отключена. При уменьшении амплитуды одной из посылок (на фиг.2 - посылки Z) ниже порога срабатывания компаратора пропадает один из признаков (PZ), что через время ТО приводит к срабатыванию таймера и установке сигнала RC в состояние лог. "1", что определяет прямое направление счета счетчика. Сигналы дополнительного усиления КИ и, соответственно, результирующего усиления КУ начинают расти до появления признака дешифрации (PZ), а следовательно, и координаты отсутствующей посылки (Z). Время поиска ТП отсутствующей координаты определяется значением тактовой частоты FT и величиной дискрета счетчика. Значение ТП определяет скорость поиска отсутствующей посылки и устанавливается исходя из характеристик сигнала и условий использования системы. При достижении необходимого дополнительного усиления КИ и появления признака дешифрации обоих типов посылок сигнал RC с выхода таймера устанавливается в нулевое состояние и увеличение сигнала КИ прекращается.
В предложенном способе и устройстве преобразователь электромагнитного излучения 2 может быть выполнен, как в прототипе.
Усилитель 3 и компаратор 5 могут быть выполнены на микросхемах типа 1401УД1 и 521 САЗ соответственно, а пиковый детектор, например, по схеме, приведенной в книге Шило В.А., Линейные интегральные схемы, Москва, " Советское радио", 1974, стр.165, рис.4.36 в.
Дешифратор 6 может быть выполнен, например, по схеме, приведенной в патенте РФ №2223514, причем выход синхронизатора используется в дешифраторе как выход генератора тактовой частоты FT.
Регистр 10, сумматор 7, схема "И" могут быть выполнены на микросхемах серии 564.
Реализация предложенного способа и устройства может быть проведена на программном уровне с помощью микропроцессорных структур.
Таким образом, введение в предлагаемый способ контура дополнительного управляемого усиления позволяет избежать пропадания сигнала координат при высоких соотношениях мощности посылок оптической линии (луча) и, следовательно, повысить точность определения положения снаряда в поле управления.
Источники информации
1. Патент РФ №2223514.
2. "Основы радиоуправления", под редакцией Вейцеля В.А. и Типугина В.Н., Москва, "Советское радио", 1973, стр.272-278,246-251, рис.4.28.
Изобретение относится к способу и системам управления летательными аппаратами и может быть использовано для измерения координат по тангажу и курсу. Достигаемым техническим результатом является повышение устойчивости и точности измерения координат. Сущность заявленного способа заключается в том, что формируют электромагнитное поле управления, изменяют параметры электромагнитного поля управления путем преобразования принятого электромагнитнго излучения в посылки импульсов с время-импульсной или кодово-импульсной модуляцией и производят нормирование амплитудно-модулированного сигнала за счет усиления с автоматической регулировкой, выделяют импульсы по заданному уровню и декодируют их, выдавая при этом значения координат по тангажу и курсу, фиксируют отсутствие определенного типа посылок (тангажа или курса) и повышают коэффициент усиления до появления соответствующей посылки (тангажа или курса). Устройство измерения координат, реализующее заявленный способ, содержит приемник, компаратор, дешифратор, сумматор, таймер и интегратор дополнительного усиления, выполненные и соединенные между собой определенным образом. 2 н.п. ф-лы, 2 ил.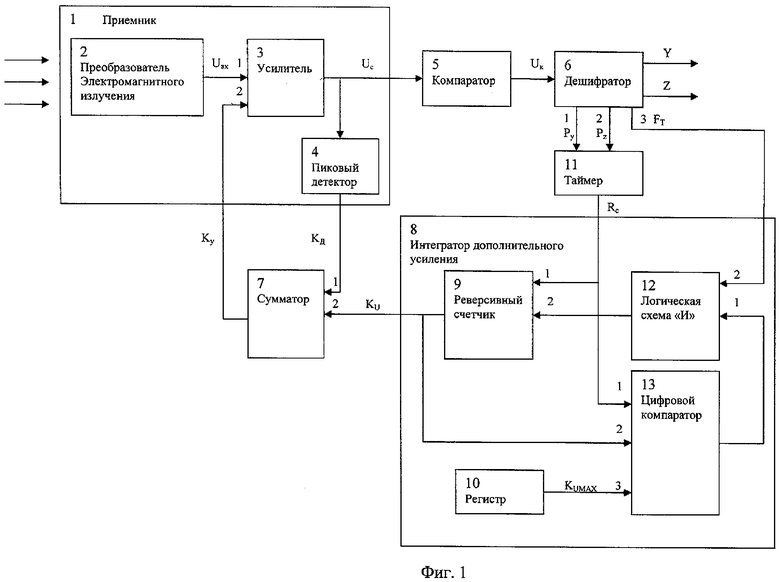
| Основы радиоуправления./ Под ред | |||
| В.А | |||
| ВЕЙЦЕЛЯ и В.Н | |||
| ТИПУГИНА | |||
| - М.: Советское радио, 1973, с.272-278, 246-251, рис.4.28 | |||
| АВТОМАТ УСТОЙЧИВОСТИ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1826781A1 |
| СПОСОБ ТЕЛЕНАВЕДЕНИЯ РАКЕТЫ ПО ЛУЧУ И СИСТЕМА ТЕЛЕНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2258888C1 |
| RU 2001134353 A, 10.07.2001 | |||
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕНАСТРОЙКОЙ КООРДИНАТ | 1995 |
|
RU2145725C1 |
| US 5372334 A, 13.12.1994 | |||
| US 2002149510 A1, 19.12.2002. | |||

