Изобретение относится к способам построения сейсмодатчиков для системы антисейсмической защиты. Помимо своего целевого назначения данное изобретение может найти применение в системах предупреждения сходов снежных лавин в горах, селевых потоков, пробуждающейся деятельности вулканов и т.д.
Применение сейсмодатчиков для системы антисейсмической защиты известно и достаточно освещено в литературе, например:
Аппаратура и методика сейсмических наблюдений в СССР. М.: Наука, 1974.
А.Ю.Булгаков, B.C.Велинский, В.Н.Вьюхин и др. Исследование и разработка цифровой сейсмологической станции с динамическим диапазоном 120 дБ. РАН Сибирского отделения. Новосибирск. Автометрия №1, 1999.
Б.К.Карапетян. Многомаятниковые сейсмометры и результаты их применения в инженерной сейсмологии. Ереван. Айпетрат, 1963.
Так известен блок сейсмодатчиков для системы антисейсмической защиты, содержащий три статико-динамических акселерометра уравновешивающего преобразования, установленных по ортогональным осям, три измерительных канала, суммирующий усилитель, компаратор, одновибратор, отличающийся тем, что к входу цепи отрицательной электромеханической обратной связи акселерометра, установленного измерительной осью вертикально, подключен источник постоянного тока, между выходами схемы формирования сигналов включены разделительные RC-цепи, а к входам электромеханической обратной связи акселерометров через аналоговый ключ подключен генератор калибровочных сигналов (Патент №2208815, 7 G01V 1/16, БИПМ №20, 2003).
К недостаткам описанных способов следует отнести то, что в них, кроме линейных перемещений, не предусмотрена регистрация угловых перемещений сейсмически опасного участка земной поверхности.
Наиболее близким к описываемому является способ построения блока сейсмодатчика, содержащего три статико-динамических акселерометра, установленных по ортогональным осям с компенсацией действия гравитационного поля акселерометра, измерительная ось которого установлена вертикально (Патент РФ №2208815, 7 G01V 1/16, БИПМ №20, 2003).
К недостаткам прототипа следует отнести измерение только линейных перемещений сейсмически опасного участка земной поверхности.
Задачей изобретения являлась разработка способа построения блока сейсмодатчиков (измерителей) с более полным диапазоном измеряемых параметров с момента зарождения процесса землетрясения (измерение линейных, угловых ускорений и угловых скоростей) до конечной фазы его разрешения (получение линейных и угловых перемещений участков земной поверхности).
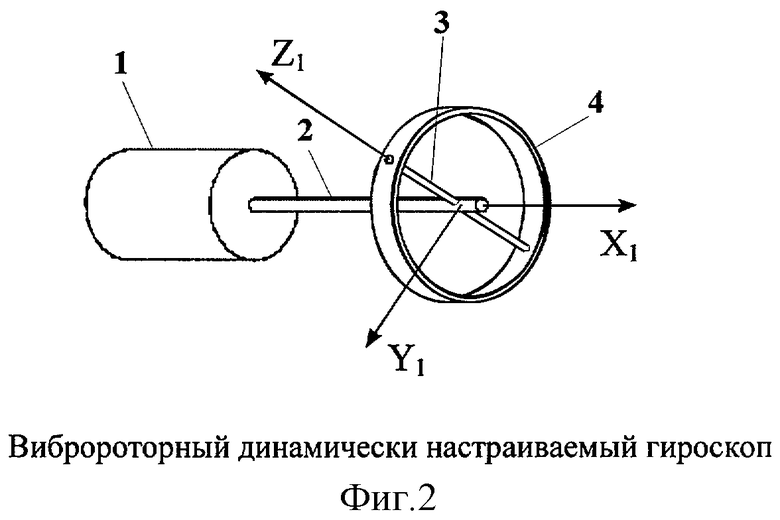
Изобретение поясняется чертежами, где на фиг.1 показано размещение измерителей блока сейсмодатчиков на платформе; на фиг.2 - вибрационный динамически настраиваемый гироскоп; на фиг.3 - структурная схема сигнализации сейсмической опасности с блоком сейсодатчиков.
Поставленная задача решается таким образом, что на платформе (фиг.1), выставляемой в плоскости горизонта, устанавливают блок сейсмодатчиков с тремя акселерометрами Ax, Ay и Az, оси которых направлены вдоль неподвижной системы координат oxyz, связанной с платформой, и двумя вибророторными динамически настраиваемыми гироскопами (вибророторные ДНГ) Г1 и Г2. Ось вращения гироскопа Г1 ориентируют по оси ох, гироскопа Г2 - по оси оу.
Акселерометры измеряют линейные ускорения вдоль осей ох, оу и oz. Ось ох направляют вдоль меридиана места установки платформы, ось oz - по вертикали места, ось оу - перпендикулярно осям ох и oz.
Вибророторный ДНГ представляет собой устройство, состоящее из электродвигателя 1 (фиг.2), вал 2 которого имеет высокую частоту вращения. На валу закреплен посредством упругих торсионов 3 ротор 4. При размещении гироскопов на платформе (как показано на фиг.1) появление угловых скоростей относительно осей платформы приводит к возникновению сил Кориолиса, воздействующих на вращающийся ротор, в результате чего ротор совершает колебания относительно торсионов, амплитуда которых пропорциональна измеряемой угловой скорости.
Вибророторный гироскоп Г1, установленный по оси ох, измеряет угловые скорости ωy и ωz по осям оу и oz, гироскоп Г2 определяет угловые скорости ωх и ωz. Достаточно двух вибророторных динамически настраиваемых гироскопов для измерения угловых скоростей ωx, ωу и ωz по всем трем осям. При таком расположении гироскопов Г1 и Г2 угловую скорость ωz измеряют оба гироскопа, то есть происходит дублирование измерения угловой скорости ωz.
В соответствии с принципом действия вибророторного ДНГ сигнал uy гироскопа Г1 содержит сигнал угловой скорости ωу, являющийся измеряемым сигналом, и сопутствующий сигнал углового ускорения  другого канала, а сигнал uz - измеряемый сигнал ωz и сопутствующий
другого канала, а сигнал uz - измеряемый сигнал ωz и сопутствующий  . Для гироскопа Г2 измеренный сигнал ux содержит сигналы ωx и ωz, сигнал uz -
. Для гироскопа Г2 измеренный сигнал ux содержит сигналы ωx и ωz, сигнал uz -  и
и  .
.
Измеряемые и сопутствующие сигналы в системе разделяют посредством схемы разделения сигналов угловых скоростей и угловых ускорений с целью получения в каждом канале сигнала угловой скорости и сигнала углового ускорения этого же канала. На выходе схемы получают сигналы ωx и , ωy и , ωz и .
Таким образом, блок сейсмодатчиков измеряет сигналы, пропорциональные линейным и угловым ускорениям, а также угловым скоростям по всем трем осям. Появление указанных сигналов (при условии, что платформа установлена вне зоны досягаемости железнодорожного транспорта, аэродромов, космодромов и испытательных военных полигонов) свидетельствует о приближении сейсмической опасности (фиг.3).
В вычислителе в результате интегрирования сигналов линейных ускорений получают сигналы линейных скоростей, при повторном интегрировании на выходе вычислителя - сигналы, пропорциональные линейным перемещениям участка местности, на котором установлена платформа с датчиками. Эти сигналы и сигналы угловых перемещений поступают в схему сигнализации, а также в базу данных для анализа и проведения исследований сейсмических зон.
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерциальный измерительный модуль | 2021 |
|
RU2761592C1 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| Способ регулировки динамически настраиваемого гироскопа в составе инерциальной навигационной системы | 2020 |
|
RU2741501C1 |
| ГИРОГОРИЗОНТКОМПАС | 2014 |
|
RU2550592C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СЕЙСМОПРИЕМНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2209449C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1996 |
|
RU2104490C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ГОРИЗОНТАЛЬНОЙ СОСТАВЛЯЮЩЕЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ (КОМПАСИРОВАНИЯ) | 2005 |
|
RU2300078C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| ГИРОГОРИЗОНТКОМПАС | 2015 |
|
RU2601240C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |

Способ построения блока сейсмодатчиков для системы антисейсмической защиты относится к области сейсмической разведки. Сущность изобретения заключается в том, что способ предусматривает установку на платформе, ориентированной в плоскости горизонта, трех акселерометров и двух вибророторных динамически настраиваемых гироскопов. Оси чувствительности акселерометров ориентированы по ортогональным осям платформы, что позволяет измерять сигналы линейных ускорений по всем трем осям платформы. Оси вращения вибророторных динамически настраиваемых гироскопов расположены в плоскости платформы по взаимно ортогональным осям. Два вибророторных динамически настраиваемых гироскопа измеряют угловые скорости и угловые ускорения по всем трем осям платформы. При этом в измеренном сигнале угловой скорости отдельно взятого канала помимо основного сигнала угловой скорости присутствует сигнал углового ускорения из соседнего канала. Схема разделения сигналов угловых скоростей и угловых ускорений позволяет выделить сигналы угловой скорости и углового ускорения для каждого канала соответственно. Таким образом, при появлении сейсмической опасности блок сейсмодатчиков реагирует как на линейные, так и на угловые ускорения и угловые скорости перемещения участков земной поверхности. Сигналы, пропорциональные линейным и угловым ускорениям, а также угловым скоростям, поступают в систему сигнализации и вычислитель, в котором происходит их интегрирование. Сигналы, пропорциональные линейным и угловым перемещениям, из вычислителя поступают в систему сигнализации и базу данных для анализа и проведения исследований сейсмически опасных зон земной поверхности. Техническим результатом, на который направлено изобретение, является применение данного блока в системах предупреждения сходов снежных лавин в горах, селевых потоков, пробуждающейся деятельности вулканов и т.д. 1 з.п. ф-лы, 3 ил.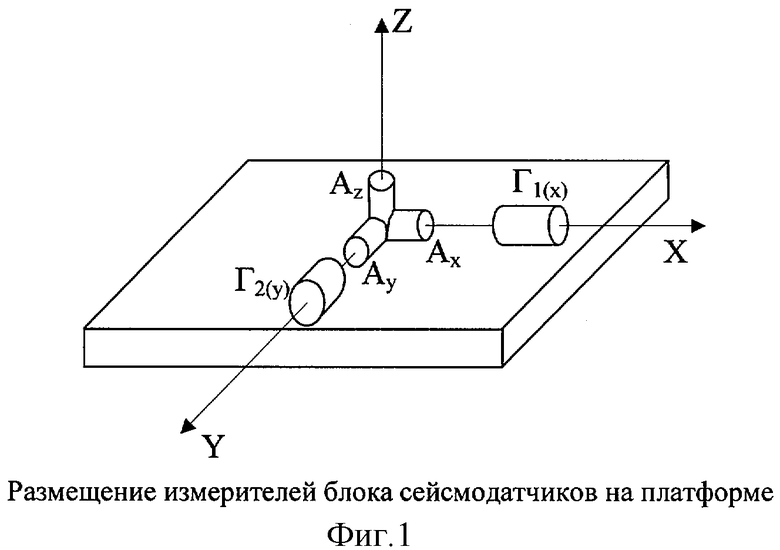
| ТРЕХКОМПОНЕНТНЫЙ ПРИЕМНИК АКУСТИЧЕСКИХ КОЛЕБАНИЙ | 1998 |
|
RU2128850C1 |
| БЛОК СЕЙСМОДАТЧИКОВ ДЛЯ СИСТЕМЫ АНТИСЕЙСМИЧЕСКОЙ ЗАЩИТЫ | 2001 |
|
RU2208815C2 |
| АППАРАТ ДЛЯ СШИВАНИЯ ТКАНЕЙ | 0 |
|
SU266138A1 |
| US 5996416, 07.12.1999. | |||

