Изобретение относится к области радиотехники и может быть использовано для построения радиолокационных и навигационных систем, позволяющих обнаруживать и следить на большой территории за местоположением объектов множественных целей.
Известны способы наблюдения за большими областями, которые включают в себя использование радиомаяков для обнаружения и слежения за множественной целью, состоящей из подвижных и неподвижных объектов.
В основе известных способов построения сотовых навигационных систем слежения за местоположением объектов множественной цели на большой территории лежит разделение области наблюдения на ячейки (соты), при этом каждая ячейка должна просматриваться не менее, чем двумя радиомаяками, чтобы сформировать два или более потока данных для исследуемой ячейки (см., например, патенты США №6690318 по классу G01S 13/93 "Сотовая радиолокация", №6111538 по классу Н04В 7/185, G01S 5/02 "Сотовая навигационная система").
Полученные данные обрабатываются в вычислительном устройстве для определения действительного местоположения объекта. Непрерывный поток данных позволяет следить за объектами, которые перемещаются из ячейки в ячейку области наблюдения.
Эффективное использование способа построения сотовой навигационной системы требует как непрерывного радиопокрытия области наблюдения, так и снижения размера зон с избыточным радиопокрытием тремя и более маяками (см. книгу Синхронное радиовещание // Под ред. А.А.Пирогова. -М.: Радио и связь, 1989, с.119-128). Для определения местоположения объекта дальномерным способом достаточно взаимное перекрытие области наблюдения двумя радиомаяками (см., например, книгу Белавина B.C. Основы радионавигации. -М.: Советское радио, 1967, 472 с.).
Просмотр области наблюдения тремя и более радиомаяками повышает материальные затраты и снижает эффективность применяемого способа построения сотовой системы радионавигации.
Известные способы построения сотовых навигационных систем позволяют определять местоположения как неподвижных объектов, так и подвижных объектов за счет обработки поступающих данных в вычислительное устройство в реальном масштабе времени (см., например, книгу Кондратьева B.C. и др. Многопозиционные радиотехнические системы. -М.: Радио и связь, 1986, 264 с.).
Определение местоположения объекта предполагается осуществлять дальнометрическим способом через определение псевдодальностей между радиомаяком и объектом.
Эффективность способов построения сотовой сети навигации определяется выбранными способом размещения радиомаяков и алгоритмом обработки результатов измерения псевдодальностей, разрешением используемой техники, точностью определения координат радиолокационных станций и параметрами объекта (скоростью перемещения, используемыми антенными системами, приемниками и передатчиками).
Известные способы построения сотовой сети навигации и алгоритмы обработки результатов измерения псевдодальностей не всегда обеспечивают необходимую эффективность использования технического ресурса.
Наиболее близким по технической сущности к предлагаемому является способ, приведенный в патенте США №6111538, Н04В 7/185, G01S 5/02 "Сотовая навигационная система", принятый за прототип.
В основе способа-прототипа лежит выбор расположения наземных маяков, излучающих широкополосные сигналы, позволяющий образовать самостоятельную сотовую систему навигации с определенным алгоритмом обработки принимаемых сигналов. Такая система может интегрироваться в состав уже существующих навигационных систем для обеспечения объектов навигационной информацией. Области наблюдения разделяются на ячейки (соты), при этом каждая ячейка должна просматриваться не менее чем двумя радиомаяками, чтобы сформировать два или более потока данных для исследуемой ячейки. Результирующие потоки для каждой ячейки обзора затем сравниваются по нескольким критериям с помощью сигнального процессора, чтобы сформировать многокритериальные потоки данных для каждой просматриваемой ячейки, которые затем суммируются. Суммарный поток данных позволяет следить за объектами, которые перемещаются из ячейки в ячейку области наблюдения.
Этот способ предполагает обнаружение и слежение за объектами множественной цели на большой территории с помощью радиомаяков, размещенных в узлах сотовых ячеек. Для чего необходимо перекрытие области наблюдения, как минимум, от трех радиомаяков. Сотовая система навигации способа-прототипа приведена на фиг.1. Представленное размещение радиомаяков в способе-прототипе для определения местоположения объектов допускает только два варианта: либо наложение от трех радиомаяков, либо от четырех. На фиг.1 малые кружки означают места расположения радиомаяков, а заштрихованные области отмечают зоны перекрытия от трех радиомаяков. Но три радиомаяка для определения псевдодальностей излучают суммарный сигнал большей мощности по сравнению с двумя маяками.
Недостатком способа-прототипа является увеличение энергетических потерь, демаскирование сети навигации, низкая эффективность использования радиолокационной техники в области наблюдения.
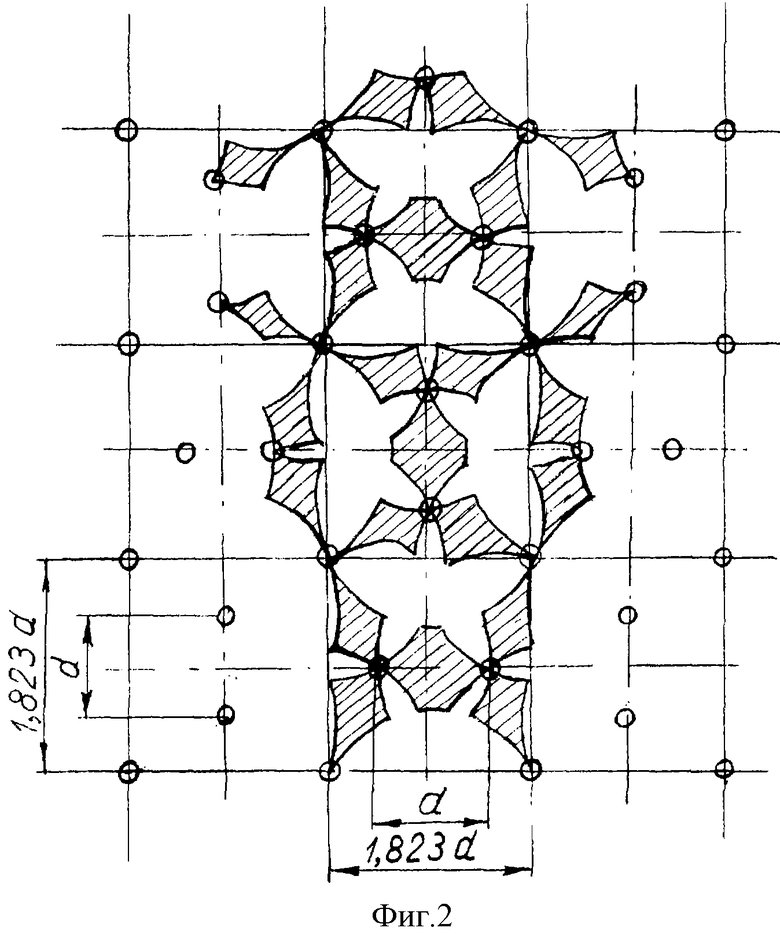
Для устранения указанных недостатков в способе построения сотовой навигационной системы, заключающейся в выборе местоположения наземных маяков, излучающих широкополосные сигналы, использовании алгоритма обработки результатов измерения псевдодальностей, согласно изобретению образуют самостоятельную систему обнаружения и слежения за объектами множественной цели, покрывающую область наблюдения без разрывов, причем радиомаяки располагают вдоль взаимно перпендикулярных линий, образующих сотовую структуру с минимальными расстояниями между радиомаяками, равными d, из которых четыре радиомаяка образуют квадраты со стороной 1,823d, где d - радиус области наблюдения одного радиомаяка, а остальные радиомаяки попарно располагают внутри образованного квадрата на расстоянии d друг от друга и радиомаяков, образующих квадраты, причем в смежных квадратах линии связи между радиомаяками взаимно перпендикулярны.
На фиг.2 представлена предлагаемая сотовая сеть навигации, где кружками обозначены местоположения радиомаяков.
Предполагается, что мощность радиолокационных станций ограничена, а радиус области наблюдения одинаков для всех радиомаяков и равен d (фиг.2). Области наблюдения, обслуживаемые только двумя радиомаяками, заштрихованы.
Радиомаяки располагаются вдоль взаимно перпендикулярных линий, как показано на фиг.2. При этом минимальное расстояние между радиомаяками определено в d единиц дальности. Радиомаяки, расположенные в вершинах квадратов со стороной 1,823d, образуют повторяющийся фрагмент, покрывающий область обслуживания. Внутри отдельного квадрата располагаются два радиомаяка, находящиеся на расстоянии d друг от друга и от радиомаяков, расположенных в вершинах квадратов со стороной 1,823d. В смежных квадратах линии, связывающие два радиомаяка, располагаются взаимно перпендикулярно и точно по оси симметрии квадрата.
При этом размер зоны перекрытия только от двух радиомаяков в пределах квадрата со стороной 1,823d составляет 1,154 d2, что составляет 35% площади квадрата со стороной 1,823d.
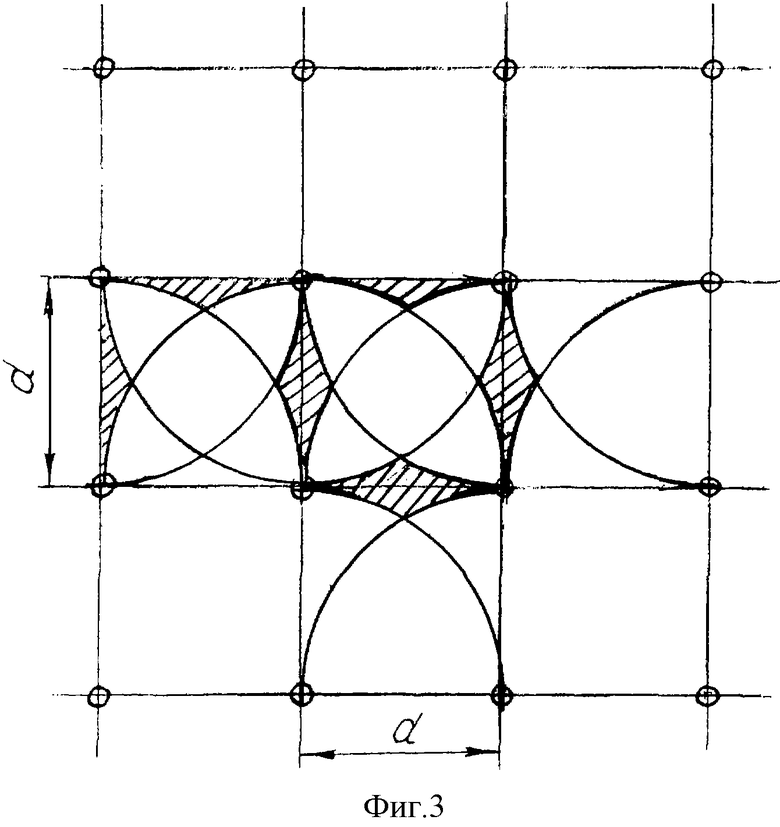
На фиг.3 приведены фрагменты с прямоугольной (квадратной) формой расположения радиомаяков, где заштрихованные области соответствуют взаимному перекрытию только от двух радиомаяков. Вычисления показывают, что в этом случае размер области наблюдения только от двух радиолокационных станций в пределах квадрата со стороной d составляет 17% площади фрагмента (см. книгу Ратынского М.В. Основы сотовой связи. -М.: Радио и связь, 1998).
Сравнительные характеристики известных способов построения навигационных систем способа-прототипа, предлагаемого и рокадной (квадратной) структуры сведены в таблицу.
Следовательно, предложенный способ построения сети навигации, по крайней мере, вдвое эффективнее известных.
Сравнительные характеристики способов построения навигационных систем
Схема устройства, осуществляющего предлагаемый способ, представлена на фиг.4.
Устройство содержит последовательно соединенные приемник 1, демодулятор 2, вычислительное устройство 3 и устройство отображения информации 4, при этом второй выход вычислительного устройства 3 соединен со вторым входом демодулятора 2.
Сигнал, принятый приемником 1, поступает в демодулятор 2, где определяются псевдодальности объектов множественной цели на большой территории.
Вычислительное устройство 3 рассчитывает по формулам (1)-(3) координаты объектов множественной цели на большой территории. При этом осуществляется обратная связь, управляющая работой демодулятора. Полученные результаты фиксируются в памяти вычислительного устройства 3 и выводятся в устройство отображения информации 4 (фиг.4). Вычислительное устройство 3 должно функционировать в режиме реального времени, обеспечивая точное определение координат подвижного объекта.

Изобретение относится к области радиотехники и может быть использовано для построения радиолокационных и навигационных систем. Технический результат - уменьшение энергетических потерь, улучшение демаскирования сети навигации, высокая эффективность использования радиолокационной техники в области наблюдения. Это достигается тем, что в способе построения сотовой навигационной системы, заключающемся в выборе местоположения наземных маяков, излучающих широкополосные сигналы, образуют самостоятельную систему обнаружения и слежения за объектами множественной цели, покрывающую область наблюдения без разрывов, причем радиомаяки располагают вдоль взаимно перпендикулярных линий, образующих сотовую структуру, в каждом фрагменте которой четыре радиомаяка образуют квадраты со стороной 1,823d, где d - радиус области наблюдения одного радиомаяка, а остальные радиомаяки попарно располагают внутри образованного квадрата на расстоянии d друг от друга и радиомаяков, образующих квадраты, причем в смежных квадратах линии связи между радиомаяками взаимно перпендикулярны и расположены точно по оси симметрии квадрата. 4 ил.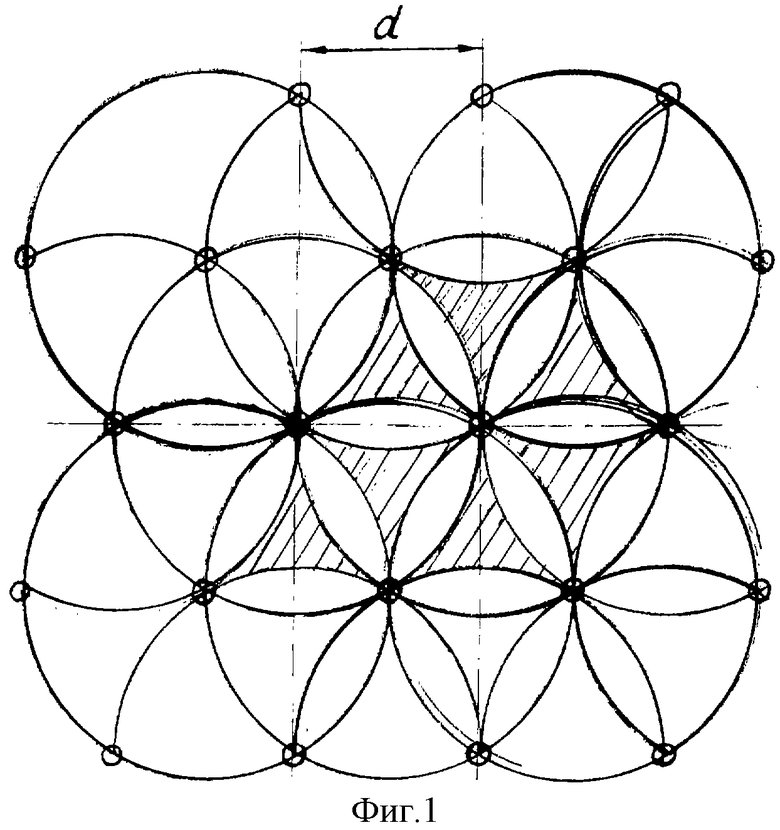
Способ построения сотовой навигационной системы, заключающийся в выборе местоположения радиомаяков, излучающих широкополосные сигналы, отличающийся тем, что при выборе местоположения радиомаяков образуют самостоятельную систему обнаружения и слежения за объектами множественной цели, покрывающую область наблюдения без разрывов, причем радиомаяки располагают вдоль взаимно перпендикулярных линий, образующих сотовую структуру, в каждом фрагменте которой четыре радиомаяка образуют квадраты со стороной 1,823d, где d - радиус области действия одного радиомаяка, а остальные радиомаяки попарно располагают внутри образованного квадрата на расстоянии d друг от друга и радиомаяков, образующих квадраты, причем в смежных квадратах линии связи между попарно расположенными радиомаяками взаимно перпендикулярны и расположены точно по оси симметрии квадрата.
| US 6111538 А, 29.08.2000 | |||
| Способ определения навигационных параметров | 1981 |
|
SU1098382A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU2018858C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2152050C1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US 6690318 А, 10.02.2004. | |||

