Изобретение относится к области навигации и предназначено для повышения точности навигации объекта, использующего в качестве навигационной системы многопозиционную радиотехническую дальномерную систему, в состав которой в качестве опорных навигационных устройств (ОНУ) входят наземные радиомаяки, а именно для формирования конфигурации ОНУ на местности. В качестве объекта навигации могут выступать наземные и водные объекты, пилотируемые и беспилотные летательные аппараты.
Известны способы навигации, основанные на применении радиотехнических дальномерных систем с наземными радиомаяками [1-5]. Однако, как показал анализ материалов, данные способы никак не определяют расположение наземного оборудования на местности в реальных условиях осуществления навигации, либо характеризуют недостаточно, по большей части указывая лишь достаточное для осуществления навигации количество ОНУ. Также встречаются предложения размещения оборудования в узлах какой-либо геометрической фигуры или вдоль линии.
Наиболее близким техническим решением, принятым в качестве прототипа, является способ [6]. В способе описан выбор местоположения наземных маяков для построения сотовой навигационной системы, путем размещения их в узлах квадратов. Данный способ не учитывает искусственных препятствий для распространения радиоволн, а также местный рельеф области, в которой осуществляется навигация, однако является наиболее обоснованным из аналогов с технической точки зрения.
Заявляемый способ предполагает размещение наземного оборудования с учетом запретных зон различной природы, рельефа, искусственных препятствий, что позволяет значительно повысить точность определения координат в заданной области пространства или районе функционирования.
Сущность изобретения заключается в следующем.
Радиотехническая дальномерная система функционирует в искусственном навигационном поле, формируемом заблаговременно размещенными в районе функционирования наземными ОНУ. В общем случае существует неограниченное количество вариантов мест расстановки ОНУ, поэтому для практического применения радиотехнической дальномерной системы должна быть решена задача поиска конечного числа вариантов расстановки ОНУ, которые в наибольшей степени удовлетворяют выбранному критерию качества, а именно точности решения навигационного решения.
Как известно, результирующая ошибка определения координат объекта с помощью радиотехнической дальномерной системы складывается из двух составляющих: ошибок определения координат ОНУ и ошибок измерения дальностей от объекта до каждого ОНУ. Кроме того, влияние указанных ошибок на результирующую ошибку определения координат характеризуется посредством геометрического фактора ухудшения точности (DOP) - параметра, зависящего от взаимного положения группировки ОНУ и объекта в момент измерения дальностей.
Геометрический фактор может изменяться в широком диапазоне значений, поэтому ошибки определения координат объекта с помощью радиотехнической дальномерной системы при его движении могут значительно варьироваться.
Заявляемый способ предполагает минимизацию геометрического фактора за счет решения задачи оптимального размещения ОНУ с целью повышения точности определения координат в заданной области пространства, например, на траектории снижения летательного аппарата, заходящего на посадку, или в районе функционирования объекта навигации.
Способ отличается отсутствием привязки к какой-либо геометрической фигуре, формированием конфигурации (варианта размещения) опорных навигационных устройств исходя из рельефа местности, разрешенных зон, необходимой области осуществления навигации.
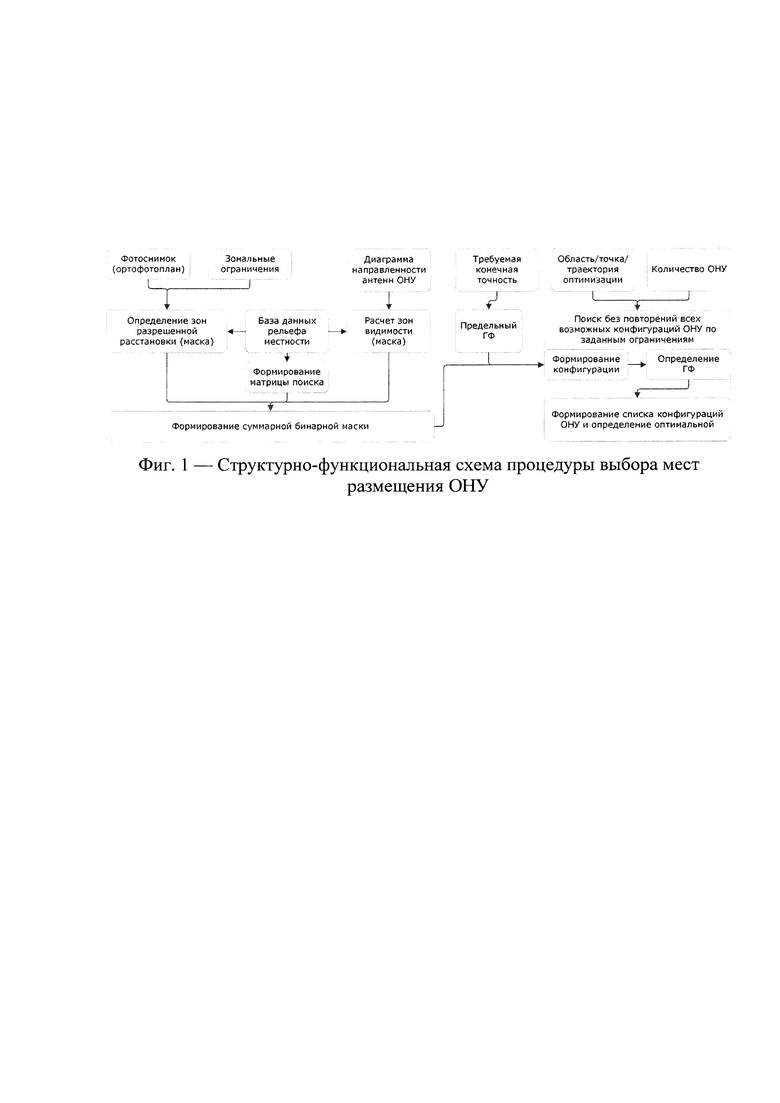
Структурно-функциональная схема процедуры выбора мест размещения ОНУ показана на фиг. 1. Основным элементом схемы является алгоритм поиска всех возможных конфигураций ОНУ. Поиск производится путем полного перебора без повторений всех конфигураций и вычисления их геометрического фактора.
Вычисление значения геометрического фактора выполняется в ходе работы итерационного алгоритма метода наименьших квадратов и для одной конфигурации ОНУ и текущей точки приближения к позиции в области исследования выполняется следующим образом:
1. Формируется матрица измерений
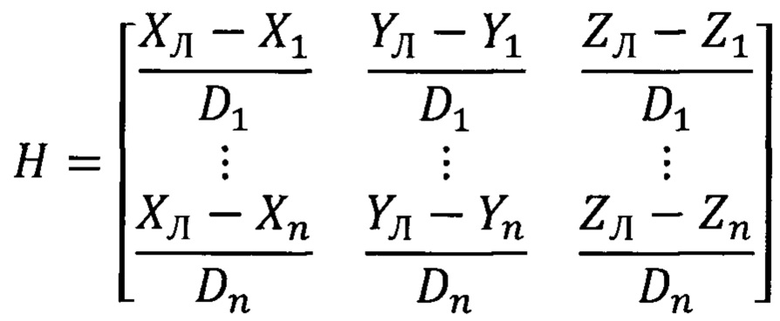
где (XЛ, YЛ, ZЛ) - координаты текущей точки приближения (точки линеаризации);
(Xi, Yi, Zi) - координаты i-го ОНУ;
Di - расстояние от точки линеаризации до i-го ОНУ.
2. Вычисляется информационная матрица
Q=(HTH)-1
3. Определяется горизонтальный (HDOP) и вертикальный (VDOP) геометрические факторы ухудшения точности:

Далее составляется список конфигураций ОНУ, удовлетворяющих зональным ограничениям, и сортируется в порядке увеличения пространственного геометрического фактора (PDOP):

Конфигурации, не обеспечивающие значения горизонтального и вертикального геометрических факторов меньше предельно допустимых, из списка исключаются.
Реализация полного перебора в заданном районе или на заданной траектории предполагает построение матрицы поиска, состоящей из точек-центров зон возможного расположения ОНУ. Для вычисления значения высоты в текущем месте установки ОНУ (точке матрицы поиска) используется цифровая модель высот. Зональные ограничения (зоны видимости, разрешенные зоны) переводятся в бинарные маски - матрицы элементов логического типа, размерность которых соответствует размерности матрицы поиска, а элементы принимают значение «истина» в том случае, если соответствующая точка матрицы поиска удовлетворяет ограничению. Суммарная бинарная маска вычисляется логическим перемножением всех масок, участвующих в расчете. Зональные ограничения могут включаться и выключаться из расчета.
Техническим результатом является повышение точности определения местоположения радиотехническим дальномерным способом благодаря оптимизации расположения ОНУ на местности с точки зрения уменьшения геометрического фактора ухудшения точности в заданном районе функционирования объекта навигации.
Способ может найти применение для построения навигационной системы в составе системы посадки пилотируемого или беспилотного летательного аппарата, в составе системы навигации судов в зонах стесненных вод, а именно в каналах, шлюзовых камерах, а также для навигации наземного транспорта, в том числе в условиях городской застройки.
Таким образом, заявленное изобретение соответствует критериям патентоспособности.
Литература
1. Патент RU 2624461 «Способ определения координат объекта», ООО «НРТБ-С», 26.08.2016.
2. Патент RU 2695805 «Способ определения координат движущегося объекта по дальностям», АО «НРТБ», 23.01.2019.
3. Патент RU 2682317 «Способ определения координат движущегося объекта», ООО «НРТБ-С», 16.07.2018.
4. Патент RU 2410518 «Комплексный способ навигации летательных аппаратов», ЗАО «ВНИИРА-Навигатор», 17.08.2012.
5. Патент RU 2264598 «Способ определения координат летательного аппарата», ОАО МНПК «Авионика», 17.12.2004.
6. Патент RU 2303793 «Способ построения сотовой навигационной системы», ОАО «Концерн «Созвездие», 12.10.2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ РАДИОТЕХНИЧЕСКОЙ ДАЛЬНОМЕРНОЙ СИСТЕМЫ | 2020 |
|
RU2770311C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2526094C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |
| Способ определения координат источника радиоизлучения в трехмерном пространстве динамической системой радиоконтроля | 2019 |
|
RU2715422C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ | 2017 |
|
RU2643360C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНОГО ОБЪЕКТА ДИНАМИЧЕСКОЙ СИСТЕМОЙ РАДИОТЕХНИЧЕСКОГО КОНТРОЛЯ | 2017 |
|
RU2660160C1 |
| Способ определения местоположения объекта навигации | 2024 |
|
RU2824861C1 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |
| Способ и устройство для контроля целостности измерений бортовой аппаратуры глобальной навигационной спутниковой системы (ГНСС) с применением измерений радиосистемы ближней навигации и псевдоспутников | 2021 |
|
RU2778093C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИМПУЛЬСНЫХ РАДИОСИГНАЛОВ | 2018 |
|
RU2695321C1 |
Изобретение относится к области навигации и предназначено для повышения точности навигации объекта, использующего в качестве навигационной системы многопозиционную радиотехническую дальномерную систему. Техническим результатом является повышение точности определения местоположения радиотехническим дальномерным способом благодаря оптимизации размещения опорных навигационных устройств (ОНУ) в заданном районе функционирования объекта навигации. В заявленном способе осуществляют вычисление горизонтального и вертикального геометрических факторов ухудшения точности. Реализация полного перебора вариантов размещения ОНУ в заданном районе или на заданной траектории предполагает построение матрицы поиска, состоящей из точек-центров зон возможного расположения ОНУ, использование цифровой модели высот для вычисления значения высоты в текущем месте установки ОНУ (точке матрицы поиска), вычисление значений горизонтального и вертикального геометрических факторов для каждой конфигурации ОНУ, которые сортируют в порядке увеличения пространственного геометрического фактора. Затем исключают конфигурации ОНУ, не обеспечивающие значения горизонтального и вертикального геометрических факторов меньше предельно допустимых. Зональные ограничения (зоны видимости, разрешенные зоны) переводятся в бинарные маски. 1 з.п. ф-лы, 1 ил.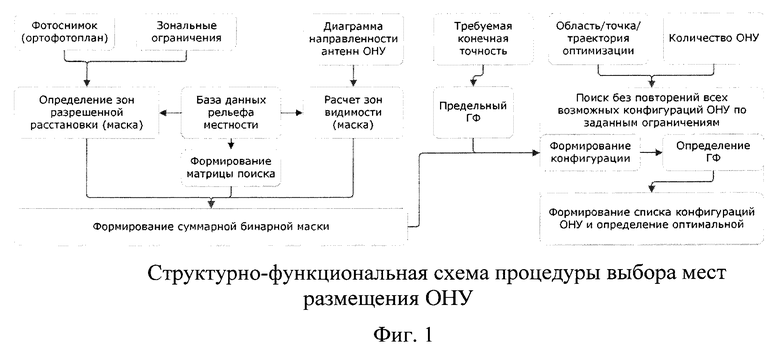
1. Способ повышения точности навигации объекта, использующего в качестве навигационной системы радиотехническую дальномерную систему, в состав которой в качестве опорных навигационных устройств входят наземные радиомаяки, отличающийся тем, что повышение точности выполняется путем минимизации горизонтального и вертикального геометрических факторов ухудшения точности при реализации полного перебора конфигураций (вариантов размещения) опорных навигационных устройств для заданного района или на заданной траектории функционирования объекта навигации путем заблаговременного построения матрицы поиска, состоящей из точек-центров зон возможного расположения опорных навигационных устройств, задания расстояния между точками матрицы поиска, использования цифровой модели высот для вычисления значения высоты в текущем месте установки опорных навигационных устройств (точке матрицы поиска), вычисления значений горизонтального и вертикального геометрических факторов для каждой конфигурации опорных навигационных устройств, сортировку конфигураций опорных навигационных устройств в порядке увеличения пространственного геометрического фактора, исключения конфигураций, не обеспечивающих значения горизонтального и вертикального геометрических факторов меньше предельно допустимых.
2. Способ по п.1, отличающийся тем, что в расчете учитываются зональные ограничения (зоны видимости, разрешенные зоны), которые переводятся в бинарные маски, размерность которых соответствует размерности матрицы поиска, а элементы принимают значение «истина» в том случае, если соответствующая точка матрицы поиска удовлетворяет ограничению, причем суммарная бинарная маска вычисляется логическим перемножением всех масок, участвующих в расчете.
| ОСТРОУМОВ И.В | |||
| Алгоритм выбора оптимальной пары радионавигационных средств при определении местоположения летательного аппарата // Доклады Белорусского государственного университета информатики и радиоэлектроники | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Термосно-паровая кухня | 1921 |
|
SU72A1 |
| СПОСОБ ПОСТРОЕНИЯ СОТОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2005 |
|
RU2303793C2 |
| Способ определения пространственных координат и углового положения удаленного объекта | 2018 |
|
RU2681836C1 |
| Способ навигации летательных аппаратов | 2016 |
|
RU2611564C1 |
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата большой автономности, совершающего протяженный подводный переход | 2018 |
|
RU2687844C1 |

