Изобретение относится к системам автоматического регулирования полета и может быть использовано для управления скоростью полета дистанционно пилотируемых летательных аппаратов (ДПЛА), экранопланов и подобных.
Известно устройство управления воздушной скоростью полета летательного аппарата, (Бортовые системы управления полетом. Под общей редакцией Ю.В.Байбородина, М.: Транспорт, 1975. 336 с.) - [1, с.103-108], реализующее закон управления
ΔδР=-kVΔV,
где
ΔδР - отклонение рычага управления двигателем от балансировочного положения;
ΔV=V-VЗ;
V - воздушная скорость полета летательного аппарата;
VЗ - заданное значение воздушной скорости полета;
kV - коэффициент передачи устройства по скорости полета.
Устройство содержит последовательно соединенные указатель скорости, первый сумматор, на вычитающий вход которого подается значение заданной скорости полета и исполнительный привод.
Данное устройство позволяет посредством управления тягой двигателя стабилизировать заданное значение воздушной скорости полета. При действии на летательный аппарат внешних факторов, таких как постоянный ветер встречного или попутного направления, стабилизация расчетного значения заданной скорости полета уже недостаточна для обеспечения прибытия летательного аппарата в контрольный пункт маршрута в заданное время.
Известно также устройство управления воздушной скоростью полета экраноплана (Диомидов В.Б. Автоматическое управление движением экранопланов, СПб.: ГНЦ РФ - ЦНИИ «Электроприбор», 1996. - 204 с.) - [2, с.110], реализующее закон управления
где
ΔV=V-VЗ - отклонение от заданной скорости полета;
Δ - флюктуации, вызванные порывами ветра.
- флюктуации, вызванные порывами ветра.
Устройство содержит последовательно соединенные указатель скорости, первый сумматор, на вычитающий вход которого подается значение заданной скорости полета, фильтр и исполнительный привод, а также акселерометр, соединенный через усилитель со вторым входом первого сумматора.
Данное устройство обеспечивает стабилизацию скорости полета с заданной точностью и позволяет устранить флуктуации воздушной скорости, вызванные порывами ветра, которые возмущают сигнал с датчика скорости. Однако при наличии встречного или попутного ветра устройство управления скоростью полета также не может обеспечить прибытия летательного аппарата в заданный пункт маршрута в заданное время. Движение летательного аппарата по маршруту с точным выдерживанием временного графика является важной задачей, возникшей в последнее время в связи с требованием обеспечения группового полета летательных аппаратов.
Технический эффект, на достижение которого направлено заявляемое изобретение, является повышение точности движения по маршруту с выдерживанием временного графика при действии на летательный аппарат возмущений.
Технический эффект достигается тем, что в устройство, содержащее последовательно соединенные указатель скорости, первый сумматор, фильтр, исполнительный привод, а также акселерометр, соединенный через усилитель со вторым входом первого сумматора, дополнительно введены блок вычисления дальности, блок формирования координат местоположения летательного аппарата, первый и второй выходы которого подключены к первому и второму входам блока вычисления дальности, первый блок умножения, первый вход которого через блок обратной функции подключен к выходу фильтра, блок ввода информации, первый и второй выходы которого подключены к третьему и четвертому входам блока вычисления дальности, второй сумматор, первый вход которого соединен с четвертым выходом блока ввода информации, а второй - с хронометром, третий сумматор, первый вход которого соединен с третьим выходом блока ввода информации, а выход - с третьим, вычитающим, входом первого сумматора, четвертый сумматор, первый и второй входы которого соединены соответственно с выходом первого блока умножения и выходом второго сумматора, а выход - со вторым входом третьего сумматора.
Сущность изобретения поясняется фиг.1 и фиг.2. На фиг.1 представлена блок-схема устройства управления скоростью полета летательного аппарата; на фиг.2 - блок-схема реализации блока вычисления дальности.
Устройство содержит:
1 - указатель скорости;
2 - акселерометр;
3 - усилитель;
4 - первый сумматор;
5 - фильтр;
6 - исполнительный привод;
7 - блок обратной функции;
8 - блок формирования координат местоположения летательного аппарата;
9 - блок вычисления дальности;
10 - первый блок умножения;
11 - блок ввода информации;
12 - хронометр;
13 - второй сумматор;
14 - третий сумматор;
15 - четвертый сумматор
Приняты следующие обозначения:
- сигнал, снимаемый с указателя скорости;
ах - сигнал, снимаемый с акселерометра;
X, Y - координаты текущего местоположения летательного аппарата;
XП, YП - координаты точки контрольного пункта маршрута;
δР - отклонение сектора газа;
t - текущее время;
tП - время прибытия;
Δt - разница между временем прибытия и текущим временем;
R - дальность до контрольного пункта маршрута;
VЗ - заданная скорость полета;
ΔVЗ - сигнал коррекции заданной скорости.
Устройство содержит последовательно соединенные указатель скорости 1, первый сумматор 4, фильтр 5, исполнительный привод 6, а также акселерометр 2, соединенный через усилитель 3 со вторым входом первого сумматора 4, блок вычисления дальности 9, блок формирования координат местоположения летательного аппарата 8, первый и второй выходы которого подключены к первому и второму входам блока вычисления дальности 9, первый блок умножения 10, первый вход которого через блок обратной функции 7 подключен к выходу фильтра 5, блок ввода информации 11, первый и второй выходы которого подключены к третьему и четвертому входам блока вычисления дальности 9, второй сумматор 13, первый вход которого соединен с четвертым выходом блока ввода информации 11, а второй - с хронометром 12, третий сумматор 14, первый вход которого соединен с третьим выходом блока ввода информации 11, а выход - с третьим, вычитающим, входом первого сумматора 4, четвертый сумматор 15, первый и второй входы которого соединены соответственно с выходом первого блока умножения 10 и выходом второго сумматора 13, а выход - со вторым входом третьего сумматора 14.
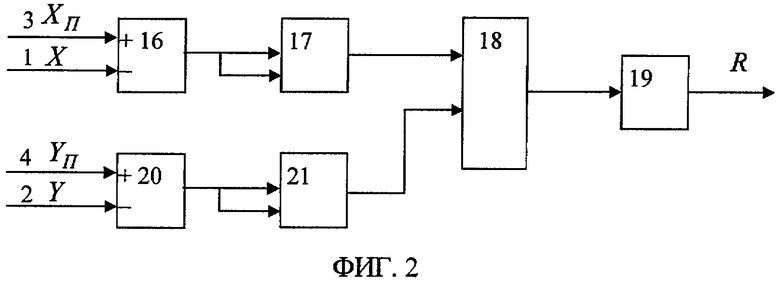
Блок вычисления дальности содержит
16 - пятый сумматор;
17 - второй блок умножения;
18 - седьмой сумматор;
19 - блок вычисления квадратного корня;
20 - шестой сумматор;
21 - третий блок умножения.
Блок вычисления дальности содержит последовательно соединенные пятый сумматор 16 и второй блок умножения 17, а также шестой сумматор 20 и третий блок умножения 21, седьмой сумматор 18, первый и второй входы которого соединены соответственно с выходами второго блока умножения 17 и третьего блока умножения 21, блок вычисления квадратного корня 19, входом подключенного к выходу седьмого сумматора 18, а выход которого является выходом блока вычисления дальности 9, первым и третьим входом которого является соответственно второй и первый вход пятого сумматора 16, вторым и четвертым входом соответственно второй и первый вход шестого сумматора 20.
Работа устройства происходит следующим образом. С выхода указателя скорости 1 поступает сигнал =V+Δ, пропорциональный сигналу воздушной скорости V с флуктуациями Δ, вызванными порывами ветра. На первом сумматоре 4 происходит его суммирование с сигналом с акселерометра 2, прошедшего через усилитель 3 с коэффициентом усиления Т, а также вычитания из полученной суммы сигнала суммы заданной скорости полета и сигнала коррекции заданной скорости, поступающего с выхода третьего сумматора 14. Для уменьшения флуктуации, вносимых порывами ветра, применяется фильтр 5 с передаточной функцией вида  , а использование акселерометра 2 позволяет компенсировать запаздывание, вносимое фильтром. В этом случае сигнал на выходе фильтра 5 имеет вид
, а использование акселерометра 2 позволяет компенсировать запаздывание, вносимое фильтром. В этом случае сигнал на выходе фильтра 5 имеет вид

где ΔV=V-VЗ.
Для достижения контрольного пункта маршрута в заданное время tП во время полета необходима коррекция значения заданной скорости VЗ для компенсирования возмущений, таких как действие ветра. Для этого с блока формирования координат местоположения летательного аппарата 8 текущие координаты X, Y поступают на блок вычисления дальности 9, также на блок вычисления дальности 9 с блока ввода информации 11 поступают координаты точки контрольного пункта маршрута XП, YП. Блок вычисления дальности 9 формирует сигнал расстояния до точки контрольного пункта маршрута следующим образом. На выходе пятого сумматора 16, входы которого являются соответственно третьим и первым входом блока 9, формируется разность XП-Х, которая возводится в квадрат на втором блоке умножения 17 и подается на первый вход седьмого сумматора 18. На выходе шестого сумматора 20, входы которого являются соответственно четвертым и вторым входом блока 9, формируется разность YП-Y, которая возводится в квадрат на третьем блоке умножения 21 и подается на второй вход седьмого сумматора 18. С выхода седьмого сумматора 18 сигнал подается на блок вычисления квадратного корня 19, выход которого является выходом блока 9, где формируется сигнал дальности до точки контрольного пункта маршрута

Полученный сигнал через первый блок умножения 10, на выходе которого формируется сигнал R/V, подается на первый вход четвертого сумматора 15. На выходе второго сумматора 13 формируется сигнал разности времени прибытия в точку контрольного пункта маршрута tП, поступающего с четвертого выхода блока ввода информации 11 и текущего времени t, поступающего с хронометра 12. Сигнал с выхода второго сумматора 13 поступает на второй вычитающий вход четвертого сумматора 15. На выходе четвертого сумматора формируется сигнал коррекции заданной скорости полета вида
где kt - передаточный коэффициент, имеющий размерность м/с2, значение которого может быть в частном случае равным единице.
С выхода четвертого сумматора 15 сигнал поступает на второй вход третьего сумматора 14, на первый вход которого подается сигнал, пропорциональный заданной скорости полета VЗ с выхода блока ввода информации 11. На выходе третьего сумматора 14 формируется сигнал вида VЗ+ΔVЗ, который поступает на третий, вычитающий вход первого сумматора 4.
Отношение R/V характеризует оставшееся время полета до точки контрольного пункта маршрута. Если полет летательного аппарата происходит строго в соответствии с временным графиком, то R/V=tП-t и, значит, заданное значение скорости полета совпадает с расчетным. Если R/V>tП-t, то полет отстает от временного графика и скорость полета будет увеличена, и наоборот, если R/V<tП-t, то полет летательного аппарата опережает временной график и, следовательно, скорость полета будет уменьшена.
Предлагаемое устройство обеспечивает время прибытия в заданную точку при действии возмущений и имеет простую в реализации конструкцию.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2305307C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДИСТАНЦИОННО-ПИЛОТИРУЕМЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2005 |
|
RU2292069C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2212702C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИСТАНЦИОННО-ПИЛОТИРУЕМЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2005 |
|
RU2292068C1 |
| СПОСОБ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2658538C2 |
| СПОСОБ ФОРМИРОВАНИЯ ТРАЕКТОРИИ БОРТОВОГО НАВЕДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2136034C1 |
| Устройство для вычисления координат | 1982 |
|
SU1083184A1 |
| СИСТЕМА ОТОБРАЖЕНИЯ ПИЛОТАЖНОЙ ИНФОРМАЦИИ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2046059C1 |
| ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
SU1797383A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ И КОРРЕКЦИИ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 1986 |
|
SU1840219A1 |
Изобретение относится к области приборостроения и может найти применение в системах автоматического регулирования полета для управления скоростью полета дистанционно пилотируемых летательных аппаратов (ДПЛА), экранопланов и т.п. Технический результат - повышение точности отработки программно-задающих воздействий во время движения летательного аппарата по маршруту с выдерживанием временного графика, как при действии возмущений на летательный аппарат, так и при их отсутствии. Для достижения данного результата в устройство дополнительно введены блок вычисления дальности, блок формирования координат местоположения летательного аппарата, первый блок умножения, блок ввода информации, второй сумматор, первый вход которого соединен с четвертым выходом блока ввода информации, а второй - с хронометром, третий сумматор, первый вход которого соединен с третьим выходом блока ввода информации, а выход - с третьим, вычитающим, входом первого сумматора, четвертый сумматор, первый и второй входы которого соединены соответственно с выходом первого блока умножения и выходом второго сумматора, а выход - со вторым входом третьего сумматора. 1 з.п. ф-лы, 2 ил.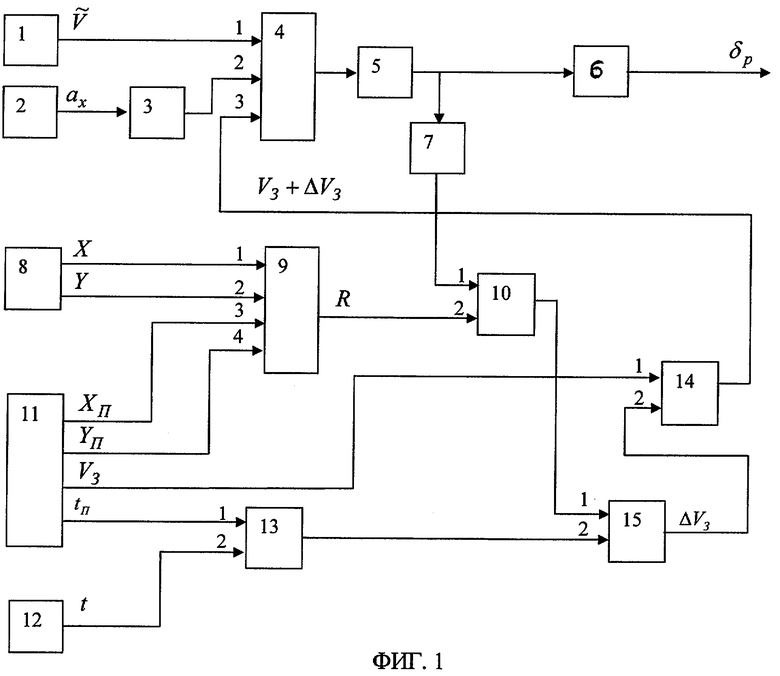
| Димидов В.Б | |||
| Автоматическое управление движением экранопланов | |||
| - СПб.: ГНЦ РФ - ЦНИИ «Электроприбор», 1996, с.110 | |||
| Бортовые системы управления полетом | |||
| /Под общ | |||
| ред | |||
| Ю.В.Байбородина | |||
| - М.: Транспорт, 1975, с.103-108 (336 с.) - | |||
| Шаров С.Н | |||
| Основы проектирования координаторов систем управления движущимися объектами: Учебное пособие | |||
| - М.: Гос.Ком |

