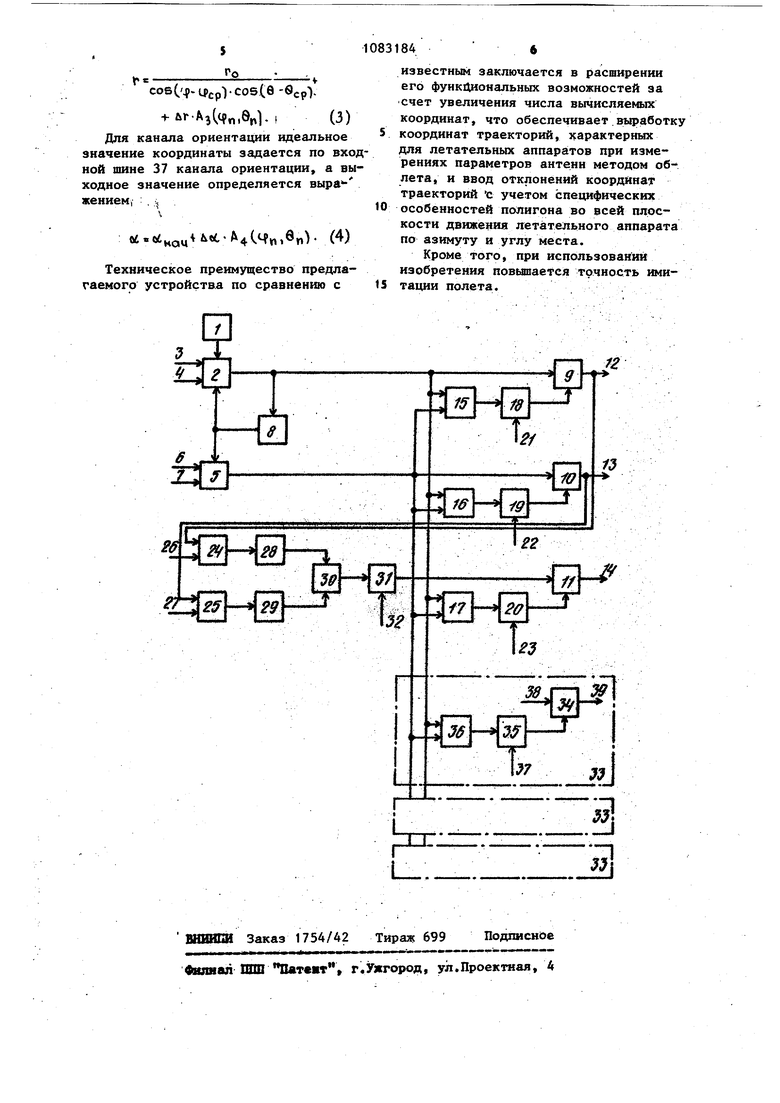
1 Изобретение относится к цифровому моделированию, конкретно к устройствам моделирования полета летательных аппаратов путем воспроизведения электрических аналогов координатой может быть использовано п отладке аппаратуры и отработке алгоритмов и программного обеспечения автоматизированных систем для измерения параметров антенн методом облета и в других системах, например тренажерах. Известны устройства, моделирующи угловые и линейные перемещения, например .устройства выработки угловых координат, в которых напряжения, аналогичные углу места и азимуту подвижного объекта, вырабатываются соответствующими потенциометрами, связанными с управляющим двигателем i . Данные устройства не обеспечиваю с достаточным приближением выработк координат, воспроизводимых летатель ным аппаратом при измерениях параме ров антенн. Наиболее близким к предлагаемому по технической сущности и достигаемьйч результатам является устройство для вычисления координат, содержаще генератор тактов, первый накапливающий сумматор, входом управления со диненный с выходом генератора такто и информационными входами с входными шинами азимута устройства, дискр минатор, входом соединенный с выходом первого накапливающего сумматор а выходом - с знаковым входом перво го накапливающего сумматора, сумматор первого канала, причем его выход соединен с выходной шиной азимута устройства, а первый вход - с выходом первого накапливающего сумматора, и запоминающее устройство первого канала 2J . Известное устройство не позволяе вырабатывать координаты дальности и .угла места для траекторий летательного аппарата, характерных при изме ениях параметров антенн методом об лета (.полет в вертикальной плоскости) , и учитывать корреляцию между координатами летательного аппарата и отклонениями траектории от идеаль ной. Цель 1зобретения - расширение функциональных возможностей за счет 84 увеличения числа вычисляемых координат угла места и дальности. Поставленная цель достигается тем, что в устройство для вычисления координат, содержащее генератор тактов, первый накапливающий сумматор, дискриминатор, первый сумматор, первый блок памяти, причем входные шины азимута устройства подключены к информационным входам первого накапливающего сумматора, управляющий и знаковый входы которого соединены соответственно с выходом генератора тактов и выходом дискриминатора, вход которого подключен к выходу первого накапливающего сумматора и первому входу первого сумматора, выход которого соединен с выходной Шиной азимута устройства, введены второй и третий сумматоры, второй и третий блоки памяти, четыре блока умножения, второй накапливающий сумматор, два вычитателя.два косинусных преобразователя, блок деления, причем входные шины угла места устройства подключены к информационным входам второго накапливающего сумматора, знаковый вход которого соединен с выходом дискриминатора, а выход подключен к первому входу второго сумматора и первым адресным входам блоков памяти, вторые адресные входы которых соединены с выходом первого накапливающего сумматора, выходы блоков памяти подключены к первым входам первого, второго и третьего блоков умножения, вторые входы которых соединены соответственно с шинами констант отклонения азимута, угла места и дальности устройства -, входные шины средних значений азимута и угла места подключены к первым входам соответственно первого и второго вычитателей, вторые входы которых соединены с выходами первого и второго сумматоров соответственно, выходы первого и второго вычитателей подключены соответственно к входам первого и второго косинусных преобразователей, выходы которых соединены, с входами четвертого блока умножения, выход которого подключен к входу делителя блока деления, вход делимого которого соединен с входной шиной дальности, а выход подключен к первому входу третьего сумматора, выходы первого, второго и третьего блоков умножения подключены к вторым входам первого, второго и третьего сумматоров, выходы второго и третьего сумматоров соединены соответственно с выходными шинами угла места .и дальности устройства. На чертеже представлена блок-схе.ма устройства для вычисления координат. Устройство содержит генератор 1 тактов, первый накапливающий сумматор 2,первую и вторую входные шины З.и 4 азимута (для ввода начального значения и приращения азимута), вто рой накапливающий сумматор 5, третью и четвертую входные шины 6 и 7 угла места (для ввода начального значения и приращения угла места), дискриминатор 8, первый, второй и третий сумматоры 9, 10 и 11, выходные шины 12, 13 и 14 азимута, угла места и дальности соответственно, первь1й, второй и третий блоки 15, .16 и 17 памяти, первый, второй и третий блоки 18, 19 и 20 умножения, входные шины 21, 22 и 23 констант отклонения азимута, угла места и дальности соответственно, первый и второй вычитатели 24 и 25, входные шины 26 и 27 средних значений азиму та и угла места, косинусные преобра зователи 28 и 29, четвертый блок 30 умножения, блок 31 деления и входную шину 32 дальности. Кроме того, в устройство могут быть введены каналы- 33 ориентации л тательного аппарата, каждый из кото рых содержит сумматор 34, блок 35 умножения, блок 36 памяти, входную шину 37 канала ориентации, входную шину 38 констант отклонения канала ориентации и выходную шину 39 канала ориентации. Устройство работает следующим об разом, . Вначале по входным шинам устройства задаются все константы, причем по первой входной шине 3 азимута и четвертой входной шине 7 угла места задаются начальные значения (Q и9д которые запоминаются в первом и вто ром накапливающих сумматорах 2 и 5 соответственно. По сигналам генератора 1 тактов накапливающий суммато 2 суммирует приращения первого канала b(pQ, поступающие по входной шине 4 азимута, образуя на выходе сумматора 2 линейно изменяющиеся значения кодов координат по азимуту 44 Срц для идеальной траектории, воспроизводя, таким образом, движение летательного аппарата по строке. По мере достижения Значениями С)ц начального tp; и конечного Ц значений дискриминатор 8 вырабатывает сигнал, изменяющий знак суммирования в первом накапливающем сумматоре 2, а второй накапливающий сумматор 5 суммирует Заданное по входной шине 7 угла места приращение u9g (переход на следующую строку), образуя на своем выходе линейно изменяющиеся значения кодов координат по углу места Q для идеальной траектории. Выходы сумматоров 2 и 5 (Cfj, и Q) образуют адрес выборки из блоков 1517 и 36 памяти, обеспечивая, таким образом, выбор отклонений A(qi,Q) от идеальной траектории по каналамj в любой точке пространства q, QH Отклонения А,; в блоках 18-20 и 35 умножения умножаются на амплитуды отклонений л Ц), uQ , Л1 и Лоб, пбступающиа по входным шинам 21-23 и 38 констант отклонения, и в сумматорах 9-11 и 34 образуются выходные сигналы координате, Q , г , ос на выходных шинах 12-14 и 39, Выходные сигналы координат Ц и Q представляются выражениями q. M),, дчо- -О &с М, (1) e 8oV&0o.Nctp + u6-A2V4 i.Qn% номер такта генератора тактов; ч - текущий номер такта; Nfip - номер строки; nctp - текущий номер строки, Дальность вычисляется при движении летательного аппарата в плоскости. Дальность идеальной траектории вычисляется блоками 24, 25, 28, 29, 30 и 31, На первые входы вычитателей 24 и 25 подаются средние значения азимута и угла места с соответствующих входных шин 26 и 27, а на вторые входы вычитателей сигналы с выходных шин 12 и 13 азимута и угла места. Значение минимальной дальности (расстояние до плоскости движения) подается с входной шины 32 дальности на вход делимого блока 31 деления, Вьгходное значение координаты дальности f определяется выражением cosC4)-q)cpVcos(e -ScpV -1-ьг-А,(,в). (3) Для канала ориентации идеальное значение координаты задается по вход ной шиие 37 канала ориентации, а выходное значение определяется выра жением, . , 06 . et нет 4 1 ® nV (4) Техническое преимущество предлагаемого устройства по сравнению с IS тации полета. известным заключается в расширении его функциональных возможностей за счет увеличения числа вычисляемых координат, что обеспечивает.выработку координат траекторий, характерных Для летательных аппаратов при измерениях параметров антенн методом облета, и ввод отклонений координат траекторий с учетом специфических особенностей полигона во всей плоскости движения летательного аппарата по азимуту и углу места. Кроме того, при использований изобретения повышается точность ими
| название | год | авторы | номер документа |
|---|---|---|---|
| Бортовая комплексная система измерения дальности и азимута | 1987 |
|
SU1529951A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ И КОРРЕКЦИИ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 1986 |
|
SU1840219A1 |
| МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПРОВЕРКИ СИСТЕМЫ УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432592C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2010 |
|
RU2435172C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЧАЛЬНЫХ УСЛОВИЙ НЕЛИНЕЙНОЙ ТРАЕКТОРИИ ВОЗДУШНОЙ ЦЕЛИ | 2011 |
|
RU2483272C2 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР ДЛЯ ОБЗОРНОГО РАДИОЛОКАТОРА | 1989 |
|
RU2144199C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| Следящий аналого-цифровой преобразователь | 1988 |
|
SU1562972A1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ НАБЕГОВ СИГНАЛА В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ И БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2271019C1 |
УСТРОЙСТВО ДЙЯ ВЫЧИСЛЕНИЯ КбОРдаНАТ, содержащее генератор тактов, первый накапливающий сумматор, . дискриминатор, первый сумматор, первый блрк памяти, причем входные ши- ны азимута устройства подключены к информационным входам первого нака)пливакщего су№1а:тора, управляющий и знаковьй входы которого соединены соответственяо с выходом генератора тактов и выходом дискриминатора, вход которого иодкгаочен к выходу первого накапливающего сумматора и первому входу первого сумматора, выход которого соединен с выходной шиной азимута устройства, отличающ е е с я тем, что, с целью расширения функциональных возможностей .за . счет увеличения числа вычисляемых координат угла места и дальности, в него введены второй и третий сумматоры, второй и третий блоки памяти, четыре блока умножения, второй накапливающий сумматор, два вычитателя, два косинусных преобразователя, блок деления, причем входные шины угла места устройства подключены к информационным входам второго накапливающего сумматораj знаковьй вход которого соединен с выходом дискриминатора, а выход.подключен к первому входу второго сумматора и первым адресным входам блоков памяти, вторые адресные входы которых соединены с выходом первого накапливающего сумматора, выходы блоков памяти подключены к первым входам первого, второго и третьего блоков умножения, вторые входы которых соединены соответственно с.шинами констант отклонения азимута, угла места и дальности устройст ва, входные шины средS них значений азимута и угла места (Л подключены к первым входам соответственно первого и второго вычитателей, вторые входы которых соединены с выходами нервогр и второго суммаjTopoB соответственно, выходь первого и второго вычитателей подключены соответственно к входам первого и второго косинусных преобразователей, 00 выходы которьпс соединены с входами со четвертого блока умножения, выход которого подключен к входу делителя х блока деления, вход делимого которо4; го соединен с входной шиной дальности, а выход подключен к первому входу третьего сумматора,:выходы первого, второго и третьего блоков умножения подключены к вторым входам первого, второго и третьего сумматоров, выходы второго-и третьего .сумматоров соединены соответственно с выход- ными шинами угла места ,и дальности устройства.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3158672, : кл | |||
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
| Водоотводчик | 1925 |
|
SU1962A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
