Изобретение относится к коммунальному машиностроению, а именно к машинам для сбора и вывоза мусора.
Известен мусоровоз, содержащий базовый автомобиль, кузов с задним бортом, установленный на базовом автомобиле, механизм загрузки мусора в кузов, размещенный внутри заднего борта и включающий в себя уплотняющую плиту, установленную с возможностью возвратно-поступательного перемещения вниз и вверх относительно заднего борта посредством гидроцилиндров, подающую плиту, установленную на нижнем конце уплотняющей плиты с возможностью поворота в вертикальной плоскости вниз и вверх относительно уплотняющей плиты при помощи гидроцилиндров, закрепленных на уплотняющей плите, гидравлическую систему, включающую в себя источник гидравлического давления и связанный с гидроцилиндрами привода уплотняющей и подающей плит гидравлический распределитель с электромагнитным приводом золотников (заявка ФРГ №3434581, кл. В65F 3/00, 20.09.1984). К недостаткам данного устройства можно отнести отсутствие автоматического включения электромагнитов привода золотников управления гидроцилиндрами привода уплотняющей и подающей плит.
Прототипом изобретения является мусоровоз, содержащий базовый автомобиль, кузов с задним бортом, установленный на базовом автомобиле, механизм загрузки мусора в кузов, размещенный внутри заднего борта и включающий в себя уплотняющую плиту, установленную с возможностью возвратно-поступательного перемещения вниз и вверх относительно заднего борта посредством гидроцилиндров, подающую плиту, установленную на нижнем конце уплотняющей плиты с возможностью поворота в вертикальной плоскости вниз и вверх относительно уплотняющей плиты при помощи гидроцилиндров, закрепленных на уплотняющей плите, гидравлическую систему, включающую в себя источник гидравлического давления с предохранительным клапаном, настраиваемым на давление срабатывания, связанный с гидроцилиндрами привода уплотняющей и подающей плит через двухсекционный гидравлический распределитель с электромагнитным приводом золотников, электронное устройство для управления электромагнитами привода золотников, включающее в себя блок управления, к одному из входов которого подключен датчик верхнего положения уплотняющей плиты, а выходы подключены к электромагнитам привода золотников, встроенный в блок управления микропроцессорный программируемый модуль, содержащий информацию о порядке включения электромагнитов привода золотников (патент ФРГ №2851084, кл. В65F 3/02, 25.11.1978). При работе мусоровоза команды на включение электромагнитов привода золотников гидрораспределителя поступают от датчиков конечного положения уплотняющей и подающей плит. Датчики срабатывают от механического контакта с элементами уплотняющей и подающей плит и размещаются внутри заднего борта непосредственно в зоне перемещения указанных плит и не защищены от механического повреждения загружаемым мусором, что снижает надежность работы мусоровоза. Кроме того, электронное устройство для управления электромагнитами привода золотников не позволяет отключать электромагнит привода золотника при движении уплотняющей плиты вверх до достижения верхнего положения в случае увеличения давления в гидросистеме до давления срабатывания предохранительного клапана. Это может привести к длительной работе гидросистемы в режиме срабатывания предохранительного клапана и может явиться причиной перегрева рабочей жидкости, что также снижает надежность работы.
Настоящее изобретение направлено на решение задачи по упрощению конструкции и повышению надежности работы.
Технический результат достигается тем, что в известном мусоровозе, содержащем базовый автомобиль, кузов с задним бортом, установленный на базовом автомобиле, механизм загрузки мусора в кузов, размещенный внутри заднего борта и включающий в себя уплотняющую плиту, установленную с возможностью возвратно-поступательного перемещения вниз и вверх относительно заднего борта посредством гидроцилиндров, подающую плиту, установленную на нижнем конце уплотняющей плиты с возможностью поворота в вертикальной плоскости вниз и вверх относительно уплотняющей плиты при помощи гидроцилиндров, закрепленных на уплотняющей плите, гидравлическую систему, включающую в себя источник гидравлического давления с предохранительным клапаном, настраиваемым на давление срабатывания, связанный с гидроцилиндрами привода уплотняющей и подающей плит через двухсекционный гидравлический распределитель с электромагнитным приводом золотников, электронное устройство для управления электромагнитами привода золотников, включающее в себя блок управления, к одному из входов которого подключен датчик верхнего положения уплотняющей плиты, а выходы подключены к электромагнитам привода золотников, встроенный в блок управления микропроцессорный программируемый модуль, содержащий информацию о порядке включения электромагнитов привода золотников, снабжен датчиком-преобразователем величины гидравлического давления в пропорциональный электрический сигнал, гидравлически подключенным к источнику гидравлического давления и электрически связанным с другим входом блока управления, при этом микропроцессорный программируемый модуль содержит данные о пороговых значениях электрического сигнала датчика-преобразователя, которые пропорциональны величинам гидравлического давления гидросистемы в каждом конечном положении уплотняющей и подающей плит при их движении вверх и вниз, а пороговые значения электрических сигналов датчика-преобразователя не превышают значения электрического сигнала данного датчика при давлении срабатывания предохранительного клапана.
Кроме того, мусоровоз снабжен включенным в электронное устройство блоком задержки передачи сигнала выключения электромагнита привода золотника гидрораспределителя при движении уплотняющей плиты вверх после достижения датчиком-преобразователем давления величины порогового значения электрического сигнала, но до срабатывания датчика верхнего положения указанной плиты, а также датчик верхнего положения уплотняющей плиты выполнен бесконтактным и установлен в верхней части заднего борта вне зоны загрузки мусора.
Технический результат достигается за счет установки датчика-преобразователя гидравлического давления в пропорциональный электрический сигнал и исключения необходимости применять отдельные датчики крайних положений уплотняющей и подающей плит. Это упрощает конструкцию мусоровоза и обеспечивает повышение надежности работы ввиду устранения возможности механического повреждения датчиков, а также линий их связи с электронным устройством управления. Повышение надежности работы также достигается тем, что датчик верхнего положения уплотняющей плиты выполнен бесконтактным и установлен в верхней части заднего борта вне зоны загрузки мусора. Наличие блока задержки передачи сигнала выключения электромагнита привода золотника при движении уплотняющей плиты вверх после достижения датчиком-преобразователем давления величины порогового значения и до достижения указанной плитой верхнего положения позволяет ограничить время работы гидросистемы в режиме срабатывания предохранительного клапана, т.е. уменьшить нагрев рабочей жидкости в гидросистеме мусоровоза.
Сущность изобретения поясняется чертежами, на которых показаны:
фиг.1 - мусоровоз, вид сбоку;
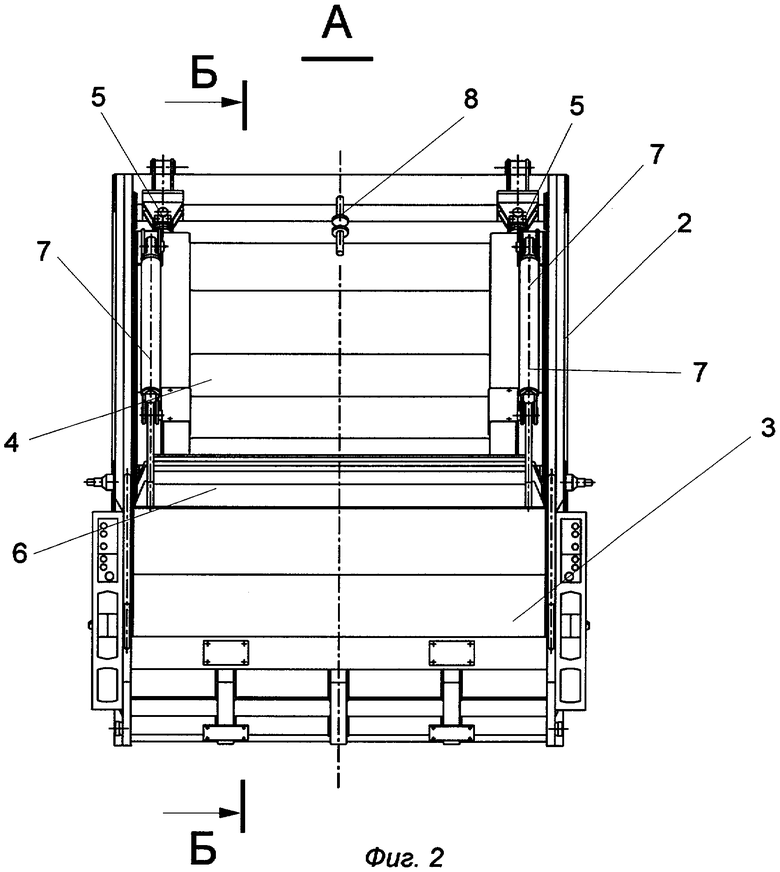
фиг.2 - то же, вид А, фиг.1;
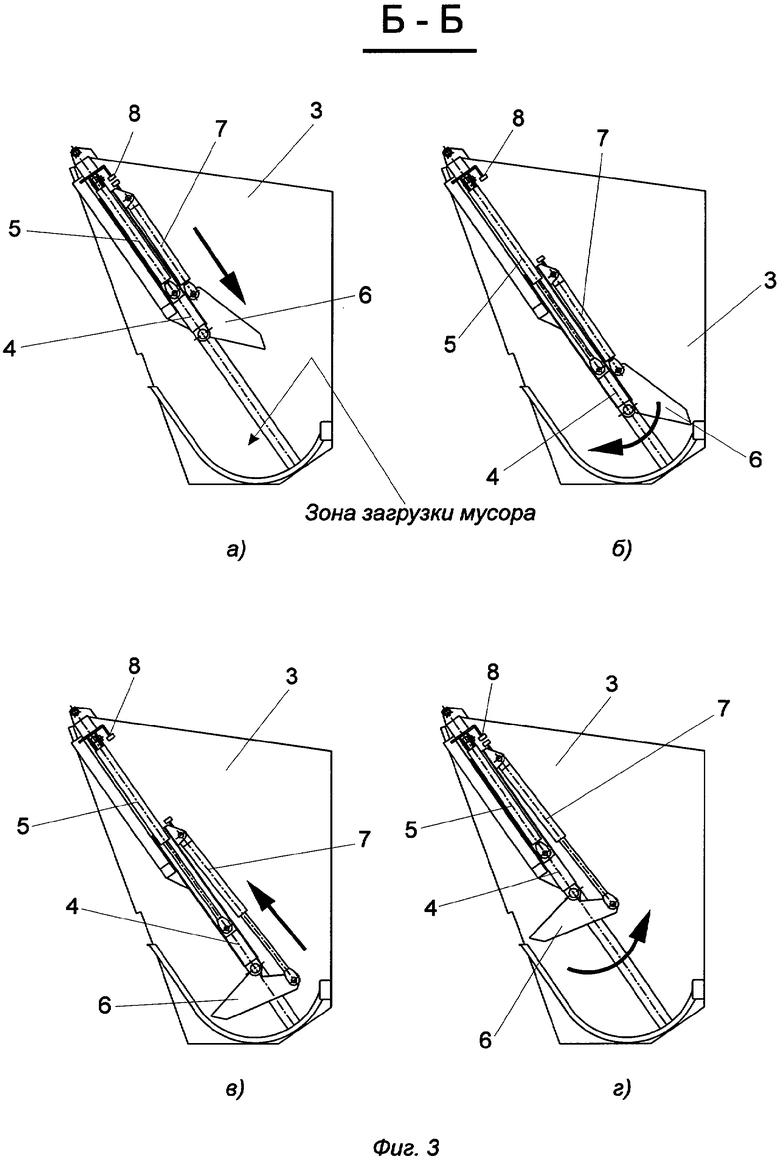
фиг.3 - то же, сечение Б-Б, фиг.2, в верхних и нижних конечных положениях уплотняющей и подающей плит при загрузке мусора, в том числе:
а) подающая плита и уплотняющая плита подняты вверх;
б) уплотняющая плита опущена вниз, а подающая плита поднята вверх;
в) подающая плита и уплотняющая плита опущены вниз;
г) уплотняющая плита поднята вверх, а подающая плита опущена вниз;
фиг.4 - гидравлическая схема;
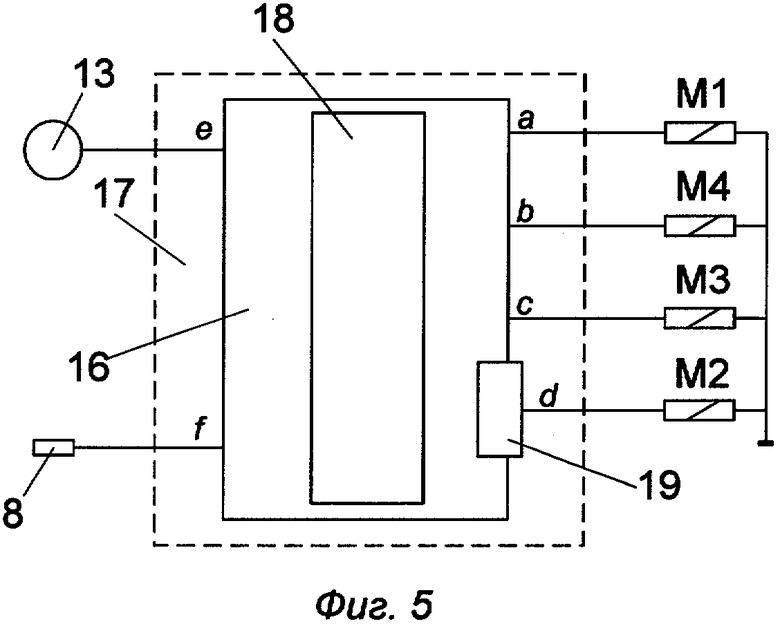
фиг.5 - электрическая блок-схема.
Мусоровоз содержит базовый автомобиль 1, на котором установлен кузов 2 с задним бортом 3. Внутри заднего борта 3 размещен механизм загрузки мусора в кузов 2, включающий в себя уплотняющую плиту 4, установленную с возможностью возвратно-поступательного перемещения вниз и вверх относительно заднего борта 3 посредством гидроцилиндров 5, а также подающую плиту 6, установленную на нижнем конце уплотняющей плиты 4 с возможностью поворота в вертикальной плоскости вниз и вверх относительно уплотняющей плиты 4 при помощи гидроцилиндров 7, закрепленных на уплотняющей плите 4. Нижняя часть заднего борта 3 образует зону загрузки мусора. В верхней части заднего борта 3 вне зоны загрузки мусора закреплен датчик 8 верхнего положения уплотняющей плиты 4, который выполнен бесконтактным, например, в виде индуктивного датчика или датчика Холла. Гидравлическая система мусоровоза включает в себя масляный бак 9, приводной гидравлический насос 10, являющийся источником гидравлического давления, предохранительный клапан 11, подключенный к нагнетательной полости насоса 10 и масляному баку 9 и настроенный на определенное давление срабатывания. К нагнетательной полости насоса 10 также параллельно присоединены двухсекционный гидравлический распределитель 12 с электромагнитным приводом золотников и датчик-преобразователь 13 гидравлического давления в пропорциональный электрический сигнал. К секции 14 гидрораспределителя 12 подключены обеими полостями гидроцилиндры 5, а к секции 15 гидрораспределителя 12 присоединены своими полостями гидроцилиндры 7. Секция 14 гидравлического распределителя 12 имеет электромагниты M1 и М2 для управления движением гидроцилиндров 5 соответственно вверх и вниз, а секция 15 этого же гидрораспределителя имеет электромагниты М3 и М4 для управления движением гидроцилиндров 7 соответственно вверх и вниз. Обмотки электромагнитов M1-М4 подключены соответственно к выходам а, b, c, d блока управления 16 электронного устройства 17. К входу е блока управления 16 подключен сигнальный выход датчика-преобразователя 13, а к входу f подключен сигнальный выход датчика 8 верхнего положения уплотняющей плиты 4. В блок управления 16 встроен микропроцессорный программируемый модуль 18, в котором содержится информация о пороговых значениях электрического сигнала датчика-преобразователя 13, которые пропорциональны величинам гидравлического давления гидросистемы в каждом конечном положении уплотняющей 4 и подающей 6 плит при их движении вверх и вниз посредством гидроцилиндров 5 и 7. Кроме этого, в модуле 18 содержится информация о порядке включения электромагнитов M1-М4 секций 14 и 15 гидравлического распределителя 12. Эта информация заносится в память модуля 18 при программировании электронного устройства и используется при работе в соответствии с логикой записанной программы. Пороговые значения электрического сигнала датчика-преобразователя 13 не превышают величины электрического сигнала этого датчика-преобразователя 13 при давлении в гидросистеме, соответствующей давлению срабатывания предохранительного клапана 11. Например, в память модуля 18 вносятся пороговые значения электрического сигнала датчика-преобразователя 13, которые соответствуют следующим величинам давления в гидросистеме: в крайнем верхнем положении уплотняющей плиты 4 давление равно 180 bar (соответствует фиг.3а и 3г); в крайнем нижнем положении уплотняющей плиты 4 давление равно 100 bar (соответствует фиг.3б и 3в); в крайнем верхнем положении подающей плиты 6 давление равно 110 bar (соответствует фиг.3а и 3б); в крайнем нижнем положении подающей плиты 6 давление равно 150 bar (соответствует фиг.3в и 3г); давление срабатывания предохранительного клапана 11 равно 200 bar. Информация о порядке включения электромагнитов M1-М4 может быть занесена в память модуля 17, например, следующим образом: первым всегда включается электромагнит М3, определяющий движение подающей плиты 6 вверх (по стрелке на фиг.3г); далее включается электромагнит M1, обеспечивающий движение уплотняющей плиты 4 вниз (по стрелке на фиг 3а); после этого включается электромагнит М4, управляющий движением подающей плиты 6 вниз (по стрелке на фиг.3б); после этого включается электромагнит М2, определяющий движение уплотняющей плиты 4 вверх (по стрелке на фиг.3в). В электронное устройство 17 включен блок 19 задержки передачи сигнала выключения электромагнита М2 при движении уплотняющей плиты 4 вверх после достижения датчиком-преобразователем 13 давления величины соответствующего порогового значения электрического сигнала, но до срабатывания датчика 8 верхнего положения уплотняющей плиты 4. Величина времени задержки выбирается из условий исключения ложных срабатываний при скачках давления в гидросистеме и может составлять, например, от 3 до 10 сек.
Работа мусоровоза осуществляется следующим образом. Мусор из контейнера (не показан) поступает в зону загрузки заднего борта 3. Уплотняющая плита 4 и подающая плита 6 находятся в положении, соответствующем показанному положению на фиг.3а. Кнопкой "Пуск" (не показана) включается электронное устройство 17, и по команде микропроцессорного программируемого модуля 18 в блок управления 16 подается сигнал на включение электромагнита М3. На обмотку этого электромагнита М3 поступает постоянный ток от источника питания (не показан), что обеспечивает включение золотника секции 15. Рабочая жидкость под давлением поступает от гидравлического насоса 10 в штоковые полости гидроцилиндров 7, и подающая плита 6 поднимается вверх. При достижении конечного верхнего положения плиты 6 (соответствует фиг.3б) давление в гидросистеме резко возрастает и датчик-преобразователь 13 вырабатывает пропорциональный электрический сигнал, равный пороговому значению при указанном положении подающей плиты 6. В соответствии с хранящейся в модуле 18 информацией о порядке включения электромагнитов M1-М4 происходит выключение электромагнита М3 и сразу за этим включается электромагнит M1. На его обмотку поступает постоянный ток, что обеспечивает включение золотника секции 14 гидрораспределителя 12. Рабочая жидкость от гидравлического насоса 10 подается в поршневые полости гидроцилиндров 5, и они начинают перемещать уплотняющую плиту 4 вниз. При достижении уплотняющей плитой 4 нижнего конечного положения (соответствует фиг.3в) давление в гидросистеме резко возрастает и датчик-преобразователь 13 вырабатывает пропорциональный электрический сигнал, равный пороговому значению при указанном положении уплотняющей плиты 4. Непосредственно после этого обмотка электромагнита M1 обесточивается и включается электромагнит М4, который обеспечивает переключение золотника секции 15 гидрораспределителя 12. Рабочая жидкость от насоса 10 подается в поршневые полости гидроцилиндров 7, и они начинают опускать подающую плиту 6 вниз. Подающая плита 6, поворачиваясь в вертикальной плоскости, выгребает мусор, находящийся в заднем борту 3. При достижении плитой 6 крайнего нижнего положения (соответствует фиг.3г) вновь происходит резкое увеличение давления в гидросистеме и датчик-преобразователь 13 вырабатывает пропорциональный сигнал, равный пороговому значению при указанном положении подающей плиты 6. Электромагнит М4 выключается, а затем включается электромагнит М2. Это приводит к переключению золотника секции 14 гидрораспределителя 12, и уплотняющая плита 4 начинает перемещаться вверх с помощью гидроцилиндров 5, в штоковые полости которых поступает рабочая жидкость от гидравлического насоса 10. Мусор, находящийся между подающей 6 и уплотняющей 4 плитами, перемещается вверх и загружается в кузов 2. При этом происходит уплотнение мусора по мере заполнения кузова 2. При достижении уплотняющей плитой 4 крайнего верхнего положения (соответствует фиг.3а) происходит резкое увеличение давления в гидросистеме и датчик-преобразователь 13 вырабатывает пропорциональный сигнал, равный пороговому значению при указанном положении уплотняющей плиты 4. Электромагнит М2 выключается, и движение уплотняющей плиты 5 вверх останавливается. Одновременно происходит срабатывание датчика 8 конечного верхнего положения уплотняющей плиты 4, и в блок управления 16 поступает команда на выключение электронного блока 17 либо команда на продолжение работы. В этом случае описанный выше процесс повторяется. При непрерывной загрузке мусора в задний борт 3 работа механизма загрузки может продолжаться циклически сколь угодно долго. На завершающей стадии заполнения кузова 2 мусором давление в гидравлической системе при движении уплотняющей плиты 4 вверх увеличивается, поскольку увеличивается сопротивление со стороны перемещаемого плитой 4 мусора. В определенный момент, когда усилия, создаваемого гидроцилиндрами 5, не достаточно для преодоления сопротивления перемещаемого мусора при давлении в гидросистеме, соответствующем давлению настройки предохранительного клапана 11 (при этом пропорциональный электрический сигнал, вырабатываемый датчиком-преобразователем 13, превысил величину порогового значения для верхнего положения уплотняющей плиты 4), движение уплотняющей плиты 4 вверх прекращается. Предохранительный клапан 11 переливает рабочую жидкость в масляный бак 9. Блок 19 задержки передачи сигнала выключения электромагнита М2 ведет отсчет заданного времени задержки, после истечения которого происходит выключение электронного устройства 13. Это соответствует полной загрузке кузова 2 мусором.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУСОРОВОЗ С ПОСТУПАТЕЛЬНОЙ СИСТЕМОЙ УПЛОТНЕНИЯ ОТХОДОВ | 2022 |
|
RU2791578C1 |
| Мусоровоз | 1985 |
|
SU1247316A1 |
| Мусоровоз | 1981 |
|
SU982987A1 |
| Устройство для уплотнения и выгрузки мусора | 1981 |
|
SU973438A1 |
| Мусоровоз | 1985 |
|
SU1248904A2 |
| Мусоровоз | 1985 |
|
SU1331744A1 |
| МУСОРОВОЗ | 2014 |
|
RU2559650C1 |
| Мусоровоз | 1987 |
|
SU1482868A1 |
| Устройство для разгрузки контейнеров в кузов мусоровоза | 1986 |
|
SU1381038A1 |
| Мусоровоз | 1981 |
|
SU1020315A1 |

Изобретение относится к коммунальному машиностроению, а именно к машинам для сбора и вывоза мусора. Мусоровоз содержит механизм загрузки мусора в кузов, который состоит из уплотняющей и подающей плит, приводимых в движение гидроцилиндрами, управляемыми гидрораспределителем с электромагнитным приводом, и электронное устройство для управления электромагнитами. Включение электромагнитов производится от блока управления. В микропроцессорный программируемый модуль записана информация о величинах пороговых значений электрического сигнала датчика-преобразователя (13), соответствующая величинам гидравлического давления в гидросистеме при конечных положениях уплотняющей (4) и подающей (6) плит. Значение электрического сигнала, вырабатываемого датчиком-преобразователем (13) при срабатывании предохранительного клапана гидросистемы, превышает пороговые значения электрического сигнала этого датчика-преобразователя. К входу блока управления подключен датчик верхнего конечного положения уплотняющей плиты. В электронное устройство встроен блок задержки передачи сигналов выключения электромагнита после достижения датчиком-преобразователем (13) порогового значения электрического сигнала, но до срабатывания датчика верхнего положения уплотняющей плиты. Изобретение упрощает конструкцию и повышает надежность 2 з.п. ф-лы, 5 ил.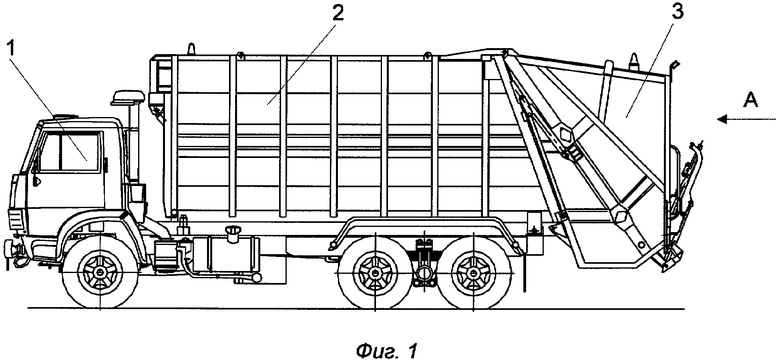
| Аппарат для изготовления зубных пластинок из каучука и т.п. | 1929 |
|
SU43600A1 |
| DE 2851084 A1, 04.06.1980 | |||
| Устройство для загрузки мусора в кузов мусоровоза | 1981 |
|
SU1012795A3 |
| Устройство для указания количества жидкости в резервуаре | 1927 |
|
SU7668A1 |

