Заявленное изобретение относится к аварийным радиомаякам, используемым для обнаружения терпящих бедствие различных, например, воздушных судов.
Известен аварийный радиомаяк, описанный в заявке США №2005/0073458, 07.04.2005, содержащий антенну, синтезатор, модулятор, генератор модуляции, контроллер, усилитель.
Однако это устройство имеет недостатки - у этого устройства низкая точность определения координат места катастрофы воздушного судна, и необходимо затрачивать много времени на поиски терпящих бедствие.
Известен также радиомаяк, описанный в заявке РФ №2013783, 30.06.1994, содержащий блок управления, блок индикации, переключатель рода работы, источник речевого сигнала, блок питания, автоподатчик телефонных сигналов, микрофонный усилитель, коммутатор, антенный ввод, задающий генератор, модулятор, усилитель мощности, аварийную антенну.
Однако это устройство также имеет недостаток - низкая точность определения координат места катастрофы воздушного судна, и необходимо затрачивать много времени на поиски терпящих бедствие.
Известен также аварийный радиомаяк, описанный в патенте РФ №2157546, 10.10.1999, содержащий блок ввода сигналов активизации радиомаяка, сумматор, блок постоянной памяти, формирователь кода времени, преобразователь параллельного кода в последовательный код, формирователь управляющего напряжения, передатчик спутникового канала, формирователь модулирующего сигнала, передатчик приводного канал, дуплексер, антенну, приемник навигационный сигналов GPS (Global Position System - глобальная система позиционирования) и/или ГЛОНАСС, пульт дистанционного управления, блок оперативной памяти, блок автономного питания, блок формирования сигнала аварийной перегрузки, выход которого соединен с блоком ввода сигналов активизации радиомаяка, второй вход которого соединен с пультом дистанционного управления, выход блока ввода сигналов активизации радиомаяка соединен с формирователем кода времени и селектором питания, который соединен с блоком автономного питания, формирователем аварийной перегрузки, блоком ввода сигналов активизации радиомаяка, пультом дистанционного управления, блоком оперативной памяти, передатчиком приводного канала, передатчиком спутникового канала, формирователем модулирующего канала, блоком постоянной памяти, формирователем кода времени, а передатчик спутникового канала своим выходом соединен с дуплексером, второй вход которого соединен с выходом передатчика приводного канала, вход которого соединен с выходом формирователя модулирующего сигнала, выход дуплексера соединен со входом второй антенны, а вход приемника GPS и/или ГЛОНАСС соединен с выходом первой антенны.
Однако это устройство также имеет низкую точность определения координат места катастрофы воздушного судна, а также требует много времени для поиска терпящих бедствие. Кроме того, это устройство обладает низкой надежностью работы радиомаяка.
Таким образом, техническим результатом заявленного изобретения является повышение точности определения координат места катастрофы воздушного судна и сокращение времени поиска потерпевших бедствие, повышение надежности работы радиомаяка. Кроме того, дополнительным техническим результатом является расширение функциональных возможностей радиомаяка за счет вывода навигационной информации на блок индикации, что позволяет использовать радиомаяк в качестве резервного пилотажного прибора.
Указанный результат достигается за счет того, что в аварийном радиомаяке, содержащем блок ввода сигнала активизации радиомаяка, блок формирования сигнала аварийной перегрузки, первый блок постоянной памяти, формирователь кода времени, передатчик спутникового канала, формирователь модулирующего сигнала, передатчик приводного канала, дуплексер, приемник навигационных сигналов от системы GPS и/или ГЛОНАСС, блок оперативной памяти, блок автономного питания, селектор питания и пульт дистанционного управления, первый выход которого соединен с первым входом блока ввода сигнала активизации радиомаяка, второй вход которого соединен с выходом формирователя аварийной перегрузки, выход блока ввода сигнала активизации радиомаяка соединен с первым входом, предназначенным для активизации, формирователя кода времени, с третьим входом, предназначенным для активизации, селектора питания, первый выход которого соединен с входом питания блока оперативной памяти, второй выход селектора питания соединен с входом питания передатчика спутникового канала, входом питания передатчика приводного канала, входом питания формирователя модулирующего сигнала, входом питания формирователя кода времени и входом питания первого блока постоянной памяти, выход передатчика спутникового канала соединен со вторым входом дуплексера, первый вход которого соединен с выходом передатчика приводного канала, первый вход которого соединен с выходом формирователя модулирующего сигнала, первый вход селектора питания соединен с выходом блока автономного питания, вход приемника GPS и/или ГЛОНАСС соединен с выходом первой антенны, выход дуплексера соединен с входом второй антенны, дополнительно введен блок комплексирования навигационных данных и второй блок постоянной памяти, при этом первый выход селектора питания соединен с входом питания второго блока постоянной памяти, входом питания формирователя аварийной перегрузки, входом питания блока активизации радиомаяка, входом питания пульта дистанционного управления, входом питания приемника GPS и/или ГЛОНАСС и входом питания блока комплексирования данных, первый вход которого соединен с выходом приемника GPS и/или ГЛОНАСС, второй выход селектора питания соединен с входом питания дуплексера, при этом второй вход блока комплексирования навигационных данных предназначен для приема навигационный данных из бортовой сети передачи данных воздушного судна, выход второго блока постоянной памяти соединен с третьим входом блока комплексирования навигационных данных, выход и вход блока оперативной памяти соединены соответственно с четвертым входом и вторым выходом блока комплексирования навигационных данных, при этом блок оперативной памяти предназначен для хранения данных, полученных от блока комплексирования навигационных данных, и выдачи соответствующих сохраненных данных на блок комплексирования навигационных данных, выход пульта дистанционного управления соединен с пятым входом блока комплексирования навигационных данных, первый выход блока комплексирования навигационных данных соединен со вторым входом формирователя кода времени, первый выход которого соединен с входом передатчика спутникового канала, второй выход формирователя кода времени соединен со вторым входом передатчика приводного канала, третий выход формирователя кода времени соединен с входом формирователя модулирующего сигнала, третий вход формирователя кода времени соединен с выходом первого блока постоянной памяти, при этом силовая бортовая сеть питания воздушного судна соединена со вторым входом селектора питания, который предназначен для отключения питания от силовой бортовой сети при внезапном пропадании питания в силовой бортовой сети и подключения питания от блока автономного питания, на четвертый вход селектора питания поступают данные от датчика полета, при этом блок комплексирования навигационных данных предназначен для отсчета интервала времени Δt, в течение которого блок комплексирования навигационных данных
а) принимает от приемника GPS и/или ГЛОНАСС и запоминает данные долготы, широты и величину точности (Кп) определения этих значений долготы и широты в течение упомянутого времени Δt, при этом если Кп≥0,95, то запоминает эти принятые значения долготы и широты как эталонные;
б) принимает навигационные данные, а именно долготу и широту, из упомянутой бортовой сети передачи данных и запоминает полученные навигационные данные;
в) вычисляет и запоминает погрешности определения долготы ΔД и широты ΔШ для каждого навигационного прибора, выдающего навигационные данные в упомянутую бортовую сеть передачи данных, по следующим формулам:
ΔДN = Дэ - ДN,
ΔШN = Шэ - ШN,
где Дэ - эталонное значение долготы,
Шэ - эталонное значение широты,
ДN - значение долготы, полученное из упомянутой бортовой сети передачи данных от соответствующего навигационного прибора, установленного на борту воздушного судна,
ШN - значение широты, полученное из упомянутой бортовой сети передачи данных от соответствующего навигационного прибора, установленного на борту воздушного судна,
N - порядковый номер навигационного прибора, расположенного на борту воздушного судна и выдающего навигационные данные в бортовую сеть передачи данных;
а после окончания времени Δt блок комплексирования навигационных данных при Кп≥0,95 принимает:
Дс = Дэ,
Шс = Шэ,
где Дс - скомплексированная долгота,
Шс - скомплексированная широта,
а при Кп<0,95 или при невозможности приема в течение упомянутого времени Δt навигационных данных от приемника GPS и/или ГЛОНАСС блок комплексирования навигационных данных определяет минимальное значение коэффициента точности Км из заранее записанных во второй блок постоянной памяти коэффициентов K1...KN, соответствующих заранее заданным точностям бортовых навигационных приборов, причем блок комплексирования навигационных данных учитывает коэффициенты только тех упомянутых бортовых навигационных приборов, которые передали свои навигационные данные за упомянутое время Δt, после чего блок комплексирования навигационных данных вычисляет окончательные скомплексированные значения долготы Дс и широты Шс по формулам:
Дс = ДМ + ΔДМ;
Шс = ШМ + ΔШМ;
где ДМ - значение долготы М-го бортового навигационного прибора, имеющего минимальное значение упомянутого коэффициента точности Км;
ШМ - значение широты М-го бортового навигационного прибора, имеющего минимальное значение упомянутого коэффициента точности Км;
ΔДМ - накопившаяся погрешность значения долготы М-го бортового навигационного прибора, вычисленная блоком комплексирования навигационных данных во время последней итерации, в которой Кп≥0,95, и запомненная в блоке оперативной памяти;
ΔШМ - накопившаяся погрешность значения широты М-го бортового навигационного прибора, вычисленная блоком комплексирования навигационных данных во время последней итерации, в которой Кп≥0,95, и запомненная в блоке оперативной памяти;
М - номер бортового навигационного прибора, соответствующего упомянутому коэффициенту точности Км.
В частном варианте, аварийный радиомаяк снабжен блоком индикации, первый выход блока комплексирования навигационных данных соединен с первым информационным входом блока индикации, вход питания блока индикации соединен с третьим выходом селектора питания.
В другом частном варианте аварийный радиомаяк снабжен формирователем времени индикации, вход питания формирователя времени индикации соединен с первым выходом селектора питания, второй управляющий вход формирователя времени индикации соединен с третьим выходом пульта дистанционного управления, выход формирователя времени индикации соединен с третьим управляющим входом блока индикации.
Еще в одном частном варианте селектор питания состоит из преобразователя напряжения, монитора питания бортсети, трех электронных ключей, двух диодов Шоттки, блока логики, вход преобразователя напряжения является упомянутым вторым входом селектора питания, выход преобразователя напряжения соединен с входом питания первого электронного ключа и с входом питания монитора питания бортсети, вход питания второго электронного ключа является упомянутым первым входом селектора питания, выходы питания первого и второго электронных ключей соединены с анодами соответственно первого и второго диодов Шоттки, катоды первого и второго диодов Шоттки объединены и являются упомянутым первым выходом селектора питания, при этом катоды первого и второго диодов Шоттки также соединены с входом питания третьего электронного ключа, выход питания третьего электронного ключа является упомянутым вторым выходом селектора питания, выход монитора питания бортсети соединен с первым входом блока логики, второй вход которого является третьим входом селектора питания и соединен с управляющим входом третьего электронного ключа, третий вход блока логики является упомянутым четвертым входом селектора питания, первый выход блока логики соединен с управляющим входом первого электронного ключа, а второй выход блока логики соединен с управляющим входом второго электронного ключа.
В другом частном варианте в состав селектора питания входит четвертый электронный ключ, вход питания которого соединен с выходом преобразователя напряжения, а выход питания четвертого электронного ключа является третьим выходом селектора питания, упомянутый выход монитора питания бортсети соединен с управляющим входом четвертого электронного ключа.
Еще в одном частном варианте упомянутый блок логики состоит из семи трехвходовых логических элементов «И», трех логических элементов «НЕ», одного четырехвходового логического элемента «ИЛИ», одного трехвходового логического элемента «ИЛИ», вход первого логического элемента «НЕ» является упомянутым первым входом блока логики и соединен с первыми входами первого, второго, третьего, четвертого трехвходовых логических элементов «И», выход первого логического элемента «НЕ» соединен с первыми входами соответственно пятого, шестого и седьмого трехвходовых логических элементов «И», вход второго логического элемента «НЕ» является упомянутым вторым входом блока логики и соединен со вторыми входами третьего, четвертого, шестого и седьмого трехвходовых логических элементов «И», выход второго логического элемента «НЕ» соединен со вторыми входами первого, второго и пятого трехвходовых логических элементов «И», вход третьего логического элемента «НЕ» является упомянутым третьим входом блока логики и соединен с третьими входами второго, четвертого, пятого и седьмого трехвходовых логических элементов «И», выход третьего логического элемента «НЕ» соединен с третьими входами первого, третьего и шестого трехвходовых логических элементов «И», выходы пятого, шестого и седьмого трехвходовых логических элементов «И» соединены соответственно с первым, вторым, третьим входами трехвходового логического элемента «ИЛИ», выход которого является упомянутым вторым выходом блока логики, выходы первого, второго, третьего и четвертого трехвходовых логических элементов «И» соединены соответственно с первым, вторым, третьим и четвертым входами четырехвходового логического элемента «ИЛИ».
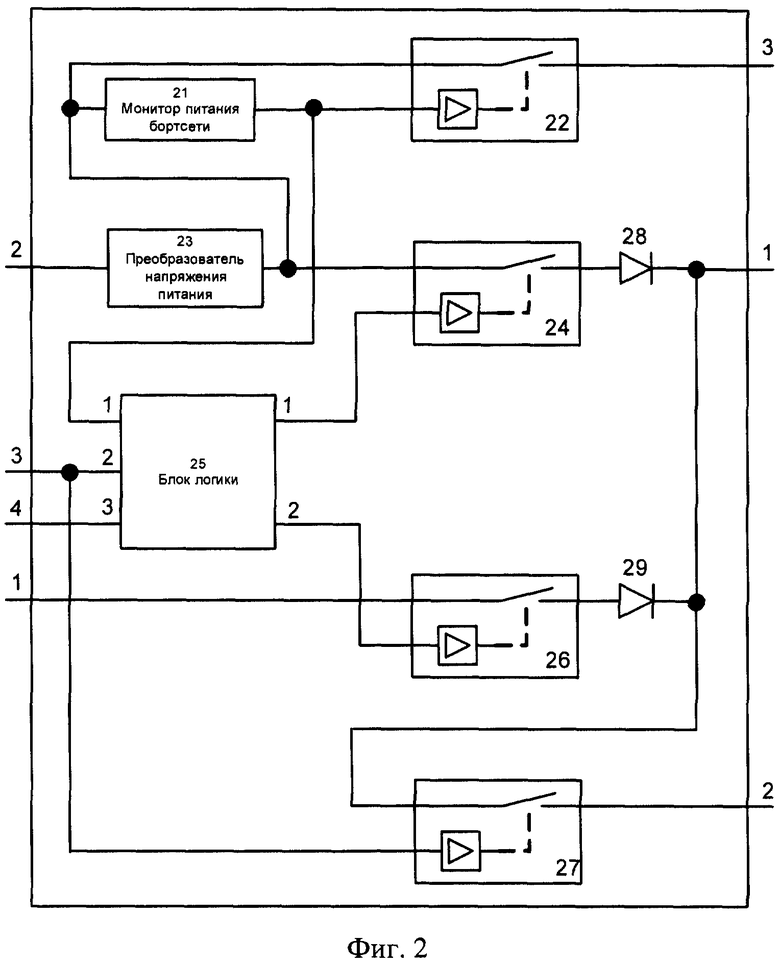
Заявленное изобретение иллюстрируется следующими чертежами: фиг.1, на которой приведена структурная схема аварийного радиомаяка; фиг.2, на которой приведена структурная схема селектора питания; фиг.3, на которой приведена структурная схема блока логики, входящего в состав селектора питания.
Как видно из чертежа фиг.1, заявленный аварийный радиомаяк 1 содержит блок 3 ввода сигнала активизации радиомаяка, блок 2 формирования сигнала аварийной перегрузки, первый блок 6 постоянной памяти, формирователь 5 кода времени, передатчик 8 спутникового канала, формирователь 9 модулирующего сигнала, передатчик 13 приводного канала, дуплексер 16, приемник 10 навигационных сигналов от системы GPS и/или ГЛОНАСС, блок оперативной памяти 7, блок 18 автономного питания, селектор питания 17, пульт дистанционного управления 4, второй блок постоянной памяти 14 и блок 11 комплексирования навигационных данных. При этом первый выход пульта 4 соединен с первым входом блока 3 ввода сигнала активизации радиомаяка, второй вход которого соединен с выходом формирователя 2 аварийной перегрузки, выход блока 3 ввода сигнала активизации радиомаяка соединен с первым входом, предназначенным для активизации, формирователя 5 кода времени, с третьим входом, предназначенным для активизации, селектора питания 17, первый выход которого соединен с входом питания блока оперативной памяти 7, с входом питания второго блока постоянной памяти 14, входом питания формирователя 2 аварийной перегрузки, входом питания блока 3 активизации радиомаяка, входом питания пульта дистанционного управления 4, входом питания приемника GPS и/или ГЛОНАСС 10 и входом питания блока 11 комплексирования данных, второй выход селектора питания 17 соединен с входом питания передатчика 8 спутникового канала, входом питания передатчика 13 приводного канала, входом питания формирователя 9 модулирующего сигнала, входом питания формирователя 5 кода времени, входом питания первого блока постоянной памяти 6 и входом питания дуплексера 16, выход передатчика 8 спутникового канала соединен со вторым входом дуплексера 16, первый вход которого соединен с выходом передатчика 13 приводного канала, первый вход которого соединен с выходом формирователя 9 модулирующего сигнала, первый вход селектора питания 17 соединен с выходом блока автономного питания 18, вход приемника GPS и/или ГЛОНАСС 10 соединен с выходом первой антенны 19, выход дуплексера 16 соединен с входом второй антенны 20, первый вход блока комплексирования навигационный данных 11 соединен с выходом приемника GPS и/или ГЛОНАСС 10.
Кроме того, второй вход блока комплексирования навигационных данных 11 предназначен для приема навигационный данных из бортовой сети передачи данных воздушного судна, по которой поступают данные от навигационных приборов (не показаны), установленных на борту воздушного судна. Выход второго блока постоянной памяти 14 соединен с третьим входом блока комплексирования навигационных данных 11, выход и вход блока оперативной памяти соединены соответственно с четвертым входом и вторым выходом блока комплексирования навигационных данных 11, второй выход пульта дистанционного управления 4 соединен с пятым входом блока комплексирования навигационных данных 11, первый выход блока комплексирования навигационных данных 11 соединен со вторым входом формирователя кода времени 5, первый выход которого соединен с входом передатчика 8 спутникового канала, второй выход формирователя 5 кода времени соединен со вторым входом передатчика 15 приводного канала, третий выход формирователя 5 кода времени соединен с входом формирователя 9 модулирующего сигнала, второй вход формирователя 5 кода времени соединен с выходом первого блока постоянной памяти 6, при этом силовая бортовая сеть питания воздушного судна соединена со вторым входом селектора питания 17, на четвертый вход которого поступают данные от датчика полета (не показаны).
Кроме того, заявленный радиомаяк 1 дополнительно может содержать в своем составе блок индикации 12, предназначенный для отображения скомплексированных навигационных данных, полученных от блока комплексирования навигационных данных 11. Первый выход блока комплексирования навигационных данных 11 соединен с первым информационным входом блока индикации 12, вход питания блока индикации 12 соединен с третьим выходом селектора питания 17.
И кроме этого, радиомаяк может дополнительно содержать и формирователь времени индикации 15, вход питания формирователя времени индикации 15 соединен с первым выходом селектора питания 17, второй управляющий вход формирователя времени индикации 15 соединен с третьим выходом пульта дистанционного управления 4, выход формирователя времени индикации 15 соединен с третьим управляющим входом блока индикации 12.
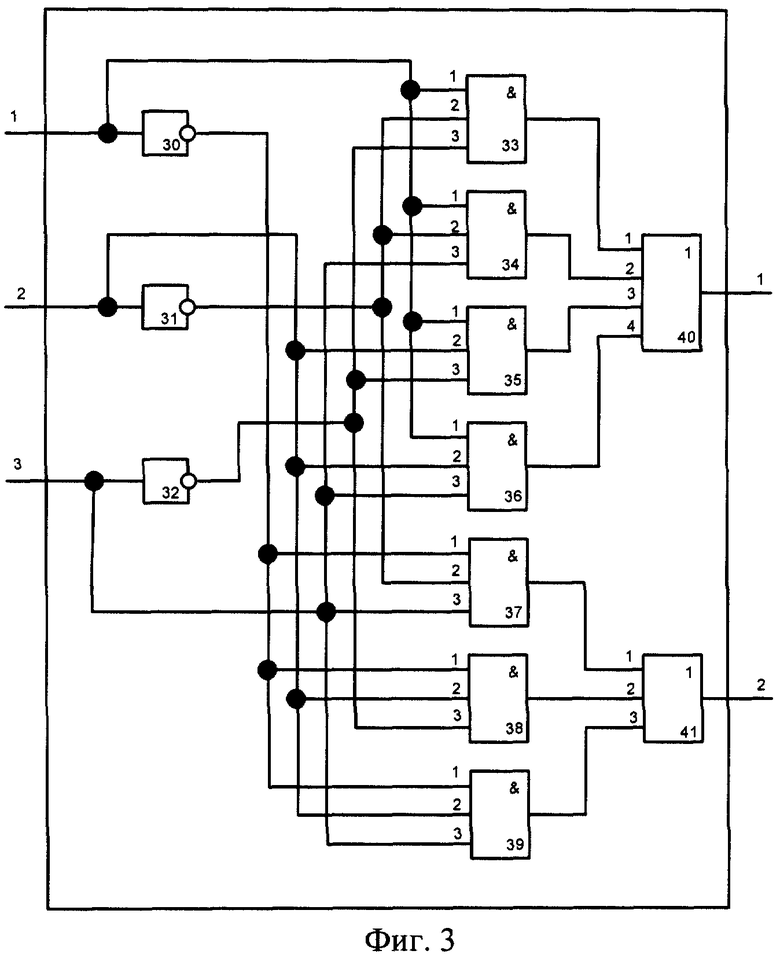
Как видно из чертежа фиг.2, селектор питания 17 состоит из преобразователя напряжения 23, монитора питания бортсети 21, трех электронных ключей 24, 26 и 27, двух диодов Шоттки 28 и 29, блока логики 25, вход преобразователя напряжения (питания) 23 является упомянутым вторым входом селектора питания 17, выход преобразователя напряжения 23 соединен с входом питания первого электронного ключа 24 и с входом питания монитора питания бортсети 21, вход питания второго электронного ключа 26 является упомянутым первым входом селектора питания 17, выходы питания первого и второго электронных ключей 24 и 26 соединены с анодами соответственно первого и второго диодов Шоттки 28 и 29, катоды первого и второго диодов Шоттки 28 и 29 объединены и являются упомянутым первым выходом селектора питания 17, при этом катоды первого и второго диодов Шоттки 28 и 29 также соединены с входом питания третьего электронного ключа 27, выход питания третьего электронного ключа 27 является упомянутым вторым выходом селектора питания 17, выход монитора питания бортсети 21 соединен с первым входом блока логики 25, второй вход которого является третьим входом селектора питания 17 и соединен с управляющим входом третьего электронного ключа 27, третий вход блока логики 25 является упомянутым четвертым входом селектора питания 17, первый выход блока логики 25 соединен с управляющим входом первого электронного ключа 24, а второй выход блока логики 25 соединен с управляющим входом второго электронного ключа 26.
Кроме того, селектор питания 17 может дополнительно содержать в своем составе четвертый электронный ключ 22, вход питания которого соединен с выходом преобразователя напряжения 23, а выход питания четвертого электронного ключа 22 является третьим выходом селектора питания 17, упомянутый выход монитора питания бортсети 21 соединен с управляющим входом четвертого электронного ключа 22.
Как видно из фиг.3, блок логики 25 состоит из семи трехвходовых логических элементов «И» 33-39, трех логических элементов «НЕ» 30-32, одного четырехвходового логического элемента «ИЛИ» 40, одного трехвходового логического элемента «ИЛИ» 41, вход первого логического элемента «НЕ» 30 является упомянутым первым входом блока логики 25 и соединен с первыми входами первого 33, второго 34, третьего 35, четвертого 36 трехвходовых логических элементов «И», выход первого логического элемента «НЕ» 30 соединен с первыми входами соответственно пятого 37, шестого 38 и седьмого 39 трехвходовых логических элементов «И», вход второго логического элемента «НЕ» 31 является упомянутым вторым входом блока логики 25 и соединен со вторыми входами третьего 35, четвертого 36, шестого 38 и седьмого 39 трехвходовых логических элементов «И», выход второго логического элемента «НЕ» 31 соединен со вторыми входами первого 33, второго 34 и пятого 37 трехвходовых логических элементов «И», вход третьего логического элемента «НЕ» 32 является упомянутым третьим входом блока логики 25 и соединен с третьими входами второго 34, четвертого 36, пятого 37 и седьмого 39 трехвходовых логических элементов «И», выход третьего логического элемента «НЕ» 32 соединен с третьими входами первого 33, третьего 35 и шестого 38 трехвходовых логических элементов «И», выходы пятого 37, шестого 38 и седьмого 39 трехвходовых логических элементов «И» соединены соответственно с первым, вторым, третьим входами трехвходового логического элемента «ИЛИ» 41, выход которого является упомянутым вторым выходом блока логики 25, выходы первого 33, второго 34, третьего 35 и четвертого 36 трехвходовых логических элементов «И» соединены соответственно с первым, вторым, третьим и четвертым входами четырехвходового логического элемента «ИЛИ» 40, выход которого является упомянутым первым выходом блока логики 25.
Основная функция селектора питания 17 - обеспечить бесперебойное питание всех устройств радиомаяка 1. При наличии питания от бортсети селектор питания 17 обеспечивает преобразование напряжения бортсети и питание этим преобразованным напряжением всех устройств радиомаяка 1. Селектор питания 17, кроме того, обеспечивает мониторинг напряжения в бортсети воздушного судна. При внезапном пропадании напряжения в бортсети, селектор питания отключает питание от бортсети и подключает питание от блока автономного питания 18, чем обеспечивает бесперебойное питание радиомаяка 1.
Дополнительная функция селектора питания 17 - снижение энергопотребления радиомаяка 1. Селектор питания 17 анализирует логические сигналы на своих входах, в зависимости от комбинаций этих логических сигналов определяет режим работы радиомаяка 1. Снижение энергопотребления достигается за счет того, что селектор питания 17 включает только те устройства радиомаяка 1, которые необходимы для выполнения данного режима, и выключает устройства, работа которых в данном режиме не нужна.
Режимы работы селектора питания.
1. «Все выключено».
Признаки режима: нулевой сигнал активизации радиомаяка 1 (третий вход селектора питания 17), нулевой сигнал «полет» (четвертый вход селектора питания 17), нет питания от бортсети (второй вход селектора питания 17).
От блока логики не поступают сигналы на управляющие входы электронных ключей 22, 24, 26, 27, все электронные ключи разомкнуты, и на выходах селектора питания 17 напряжения нет. Этот режим применяется при нахождении воздушного судна на аэродроме, с обесточенным электрооборудованием.
2. «Дежурный режим» при нахождении воздушного судна на земле.
Признаки режима: нулевой сигнал активизации радиомаяка 1 (третий вход селектора питания 17), нулевой сигнал «полет» (четвертый вход селектора питания 17). Питание от бортсети подано (второй вход селектора питания 17).
Поступление на второй вход селектора питания 17 напряжения от бортсети воздушного судна обеспечивает появление напряжения на выходе преобразователя питания 23 бортсети и появление логической единицы на выходе монитора питания бортсети 21 (фиг.2). Этот сигнал логической единицы поступает на управляющий вход четвертого электронного ключа 22, происходит включение четвертого электронного ключа 22, и напряжение от преобразователя питания 23 бортсети поступает на третий выход селектора питания 17, обеспечивая включение блока индикации 12, подключенного к этому выходу. Сигнал логической единицы от выхода монитора питания бортсети 21 также поступает на первый вход блока логики 25. На второй и третий входы блока логики 25 поступают сигналы логического нуля (нет сигналов активизации радиомаяка и признака «полет»).
Такая комбинация сигналов на входах блока логики 25 вызывает появление логической единицы на первом выходе блока логики 25 и соответственно на управляющем входе первого электронного ключа 24, происходит включение первого электронного ключа 24, и напряжение от преобразователя питания бортсети 23 поступает на первый выход селектора питания 17, обеспечивая включение устройств 15, 14, 2, 3, 4, 7, 11, 10, подключенных к этому выходу.
При прекращении подачи напряжения от бортсети воздушного судна на второй вход селектора питания 17 на управляющий вход четвертого электронного ключа 22 поступает сигнал логического нуля, что вызывает выключение четвертого электронного ключа 22 и прекращение подачи напряжения на третий выход селектора питания. На все входы блока логики 25 поступают сигналы логического нуля, что приводит к нулевым сигналам на всех выходах блока логики 25, первый электронный ключ 24 выключается и снимает напряжение с первого выхода селектора питания 17. Все устройства 15, 14, 2, 3, 4, 7, 11, 10, 12 радиомаяка 1, подключенные к первому и третьему выходам селектора питания, выключаются, радиомаяк 1 переходит в режим №1 «все выключено» (п.1).
3. «Дежурный режим» при нахождении воздушного судна в полете.
Признаки режима: нулевой сигнал активизации радиомаяка 1 (третий вход селектора питания 17), единичный сигнал «полет» (четвертый вход селектора питания 17). Питание от бортсети подано (второй вход селектора питания 17).
При наличии на втором входе селектора питания 17 напряжения от бортсети воздушного судна селектор питания 17 в режиме №3 работает аналогично режиму №2. Разница заключается в том, что сигнал логической единицы поступает не только на первый вход блока логики 25 (от монитора питания бортсети 21), но и на третий вход блока логики 25 (от датчика признака «полет» воздушного судна).
В полете, при прекращении подачи напряжения от бортсети воздушного судна, на выходе монитора бортсети 21 формируется сигнал логического нуля, что так же, как в режиме №2, вызывает выключение четвертого электронного ключа 27 и прекращение подачи напряжения на третий выход селектора питания 17. На первый и второй входы блока логики 25 поступают сигналы логического нуля, а на третий вход блока логики 25 поступает сигнал логической единицы от датчика признака «полет», что приводит к появлению нулевого сигнала на первом выходе блока логики 25 и к появлению сигнала логической единицы на втором выходе блока логики 25. На управляющий вход первого электронного ключа 24 поступает сигнал логического нуля, на управляющий вход второго электронного ключа 26 поступает сигнал логической единицы, что вызывает выключение первого электронного ключа 24 и включение второго электронного ключа 26. Напряжение от блока автономного питания 18 поступает через второй вход селектора питания 17 и второй электронный ключ 26 на первый выход селектора питания 17, что обеспечивает бесперебойную работу устройств 14, 15, 2, 3, 4, 7, 10, 11 радиомаяка 1, подключенных к первому выходу селектора питания.
При восстановлении напряжения в бортсети воздушного судна на выходе монитора бортсети 21 появляется сигнал логической единицы, что приводит, аналогично режиму №2, к включению первого 24 и четвертого 22 электронных ключей и к выключению второго электронного ключа 26. Это обеспечивает подачу напряжения от преобразователя питания бортсети на первый и третий выходы селектора питания 17.
4. «Аварийный режим».
Этот режим работает аналогично режиму №3, за исключением того, что от блока активизации 3 сигнал логической единицы поступает на третий вход селектора питания 17 и соответственно на управляющий вход третьего электронного ключа 27 и на второй вход блока логики 25. Так же, как и в режиме №3, при наличии логической единицы на первом входе блока логики 25 (питание от бортсети воздушного судна присутствует) обеспечивается включение первого 24 и четвертого 22 электронных ключей и выключение второго электронного ключа 26. Соответственно, при наличии логического нуля на первом входе блока логики 25 (питание от бортсети воздушного судна отсутствует) обеспечивается выключение первого 24 и четвертого 22 электронных ключей и включение второго электронного ключа 26. Это приводит к постоянному присутствию напряжения на первом выходе селектора питания 17. Наличие логической единицы на управляющем входе третьего электронного ключа 27 приводит к включению этого электронного ключа, за счет чего напряжение с первого выхода селектора питания 17 поступает на второй выход селектора питания 17. Таким образом, обеспечивается бесперебойная работа устройств 14, 15, 2, 3, 4, 7, 10, 11, 8, 16, 13, 9, 6, 5 радиомаяка 1, подключенных к первому и второму выходам селектора питания 17.
Блок логики 25 в составе селектора питания 17 может быть выполнен в виде программируемой логической интегральной схемы (ПЛИС). Работа блока 25 логики заключается в следующем.
Блок логики 25 анализирует логические сигналы на своих входах и в зависимости от комбинаций этих входных логических сигналов вырабатывает логические сигналы на своих выходах, которые поступают на управляющие входы первого 24 и второго 26 электронных ключей и управляют работой этих ключей. Таблица 1 является таблицей работы блока логики 25 (таблицей истинности). Нумерация входов и выходов в таблице 1 дана в соответствии с формулой изобретения и структурными схемами, приведенными на фиг.2 и фиг.3.
Блок 11 комплексирования навигационных данных во время работы радиомаяка 1 отсчитывает интервал времени Δt (время одной итерации). В течение этого интервала времени блок комплексирования данных сначала принимает от приемника GPS и/или ГЛОНАСС 10 и запоминает данные долготы, широты и величину точности (Кп) определения этих значений долготы и широты в течение упомянутого времени Δt. Если Кп≥0,95, то блок комплексирования 11 запоминает эти принятые значения долготы и широты как эталонные. Кроме этого, блок комплексирования 11 принимает также навигационные данные, а именно долготу и широту, из упомянутой бортовой сети передачи данных и запоминает полученные навигационные данные.
После этого блок комплексирования 11 вычисляет и запоминает погрешности определения долготы ΔД и широты ΔШ для каждого навигационного прибора, выдающего навигационные данные в упомянутую бортовую сеть передачи данных, по следующим формулам:
ΔДN = Дэ - ДN,
ΔШN = Шэ - ШN,
где Дэ - эталонное значение долготы,
Шэ - эталонное значение широты,
ДN - значение долготы, полученное из упомянутой бортовой сети передачи данных от соответствующего навигационного прибора, установленного на борту воздушного судна,
ШN - значение широты, полученное из упомянутой бортовой сети передачи данных от соответствующего навигационного прибора, установленного на борту воздушного судна,
N - порядковый номер навигационного прибора, расположенного на борту воздушного судна и выдающего навигационные данные в бортовую сеть передачи данных;
После окончания времени Δt блок комплексирования навигационных данных 11 при Кп≥0,95 принимает:
Дс = Дэ,
Шс = Шэ,
где Дс - скомплексированная долгота,
Шс - скомплексированная широта,
а при Кп<0,95 или при невозможности приема в течение упомянутого времени Δt навигационных данных от приемника GPS и/или ГЛОНАСС блок комплексирования навигационных данных определяет минимальное значение коэффициента точности Км из заранее записанных во второй блок постоянной памяти коэффициентов K1...KN, соответствующих заранее заданным точностям бортовых навигационных приборов, причем блок комплексирования навигационных данных учитывает коэффициенты только тех упомянутых бортовых навигационных приборов, которые передали свои навигационные данные за упомянутое время Δt.
После этого блок комплексирования навигационных данных 11 вычисляет окончательные скомплексированные значения долготы Дс и широты Шс по формулам:
Дс = ДМ + ΔДМ;
Шс = ШМ + ΔШМ;
где Дм - значение долготы М-го бортового навигационного прибора, имеющего минимальное значение упомянутого коэффициента точности Км;
Шм - значение широты М-го бортового навигационного прибора, имеющего минимальное значение упомянутого коэффициента точности Км;
ΔДМ - накопившаяся погрешность значения долготы М-го бортового навигационного прибора, вычисленная блоком комплексирования навигационных данных 11 во время последней итерации, в которой Кп≥0,95, и запомненная в блоке оперативной памяти 7;
ΔШМ - накопившаяся погрешность значения широты М-го бортового навигационного прибора, вычисленная блоком комплексирования навигационных данных 11 во время последней итерации, в которой Кп≥0,95, и запомненная в блоке оперативной памяти 7;
М - номер бортового навигационного прибора, соответствующего упомянутому коэффициенту точности Км.
Для лучшего понимания алгоритма работы приведем следующий конкретный пример.
Краткая характеристика имеющихся на борту воздушного судна навигационных приборов.
1. GPS/ГЛОНАСС приемник (установлен в аварийном радиомаяке). Точность 100 метров, то есть 3'' (результат округлен). Накапливающейся погрешности нет. В некоторых случаях, из-за неудачного расположения спутников или зашумления спутниковых сигналов атмосферными и промышленными помехами, может наблюдаться ухудшение точности, вплоть до невозможности определения координат.
2. Радиотехническая система ближней навигации (РСБН). Наибольшая точность 200 метров, т, е. 6'' (результат округлен), достигается только во время пролета мимо радиомаяка РСБН, т.е. на специальных корректирующих точках маршрута (авиационной трассы). Между этими точками возможно накопление погрешности. В некоторых случаях, даже на этих специальных точках маршрута, из-за зашумления сигналов радиомаяков РСБН атмосферными и промышленными помехами, может наблюдаться ухудшение точности, вплоть до невозможности определения координат.
3. Инерционная навигационная система (ИНС). При включении системы и вводе скорректированных данных точность сравнима с точностью GPS/ГЛОНАСС приемника (100 метров, то есть 3''), однако происходит быстрое накопление погрешности, из-за чего после 20 минут полета данными ИНС без дополнительного комплексирования или коррекции пользоваться нельзя. ИНС не зависит от внешних сигналов, поэтому навигационные данные ИНС присутствуют всегда.
4. Вычислительная система самолетовождения (ВСС). Использует данные бортовых пилотажных приборов и по ним вычисляет координаты воздушного судна (ВС). В ВСС могут поступать и данные РСБН. Точность, приведенная к координатам ВС, 500 метров или 15''. Возможно накопление погрешности. Навигационные данные ВСС присутствуют всегда (от пилотажных приборов).
Состав имеющихся на борту навигационных приборов может изменяться в зависимости от типа воздушного судна, года выпуска и т. д. Например, на новых самолетах на борту устанавливают GPS/ГЛОНАСС приемник, и его данные можно использовать в блоке комплексирования вместо GPS/ГЛОНАСС приемника, установленного в аварийном радиомаяке. На большинстве самолетов, эксплуатируемых в настоящее время в России, бортовых GPS/ГЛОНАСС приемников нет. Однако даже при наличии бортового GPS/ГЛОНАСС приемника GPS/ГЛОНАСС приемник, установленный в аварийном радиомаяке, не является лишним, так как во время аварии бортовые приборы или бортовая сеть передачи данных могут выйти из строя.
Следует также отметить, что, говоря о постоянном присутствии навигационных данных от каких-либо приборов, имеется в виду нормальная работа навигационных приборов на борту исправного воздушного судна. Во время аварии возможен отказ любого из приборов, поэтому задача блока комплексирования 11 состоит в наиболее точном определении местоположения воздушного судна на основании поступивших данных, пусть даже не от всех имеющихся на борту приборов.
Пусть истинное местоположение воздушного судна составляет:
55°01'17'' северной широты (с.ш.);
38°25'12'' восточной долготы (в.д.).
Во второй блок постоянной памяти 14 записаны коэффициенты К1, К2, К3, характеризующие паспортные точности бортовых навигационных приборов:
1. РСБН: точность 6'', следовательно, К1=6.
2. ИНС: точность 3'', следовательно, К2=3.
3. ВСС: точность 15'', следовательно, К3=15.
За время Δt первой итерации приняты навигационные данные от всех четырех приборов:
1. GPS/ГЛОНАСС приемник.
Коэффициент точности Кп=0,99, поэтому принятые значения долготы и широты можно считать эталонными:
Шэ=55°01'18'' северной широты (с.ш.);
Дэ=38°25'11'' восточной долготы (в.д.).
2. РСБН:
Ш1=55°13'26'' северной широты (с.ш.);
Д1=38°36'17'' восточной долготы (в.д.).
3. ИНС:
Ш2=55°32'31'' северной широты (с.ш.);
Д2=38°53'45'' восточной долготы (в.д.).
4. ВСС:
Ш3=54°37'20'' северной широты (с.ш.);
Д3=38°7'31'' восточной долготы (в.д.).
Затем вычисляются и запоминаются погрешности определения долготы и широты бортовыми навигационными приборами (по сравнению с эталонными значениями):
1. РСБН:
ΔШ1=Шэ - Ш1;
ΔШ1=55°01'18''-55°13'26''=-0°12'8'' (с.ш.);
ΔД1=Дэ - Д1;
ΔД1=38°25'11''-38°36'17''=-0°11'16'' (в.д.).
2. ИНС:
ΔШ2=Шэ - Ш2;
ΔШ2=55°01'18''-55°32'30''=-0°31'12'' (с.ш.);
ΔД2=Дэ - Д2;
ΔД2=38°25'11''-38°53'45''=-0°28'34'' (в.д.).
3. ВСС:
ΔШ3=Шэ - Ш3;
ΔШ3=55°01'18''-54°37'17''=-0°24'01'' (с.ш.);
ΔД3=Дэ - Д3;
ΔД3=38°25'11''-38°7'31''=-0°17'30'' (в.д.).
Далее определяется скомплексированные данные.
Так как Кп=0,99>0,95, то в качестве скомплексированных данных берутся эталонные данные:
Шс = Шэ=55°01'18'' северной широты (с.ш.);
Дс = Дэ=38°25'11'' восточной долготы (в.д.).
Допустим, при следующей (второй) итерации навигационные данные от GPS/ГЛОНАСС приемника приняты с коэффициентом точности Кп=0,87<0,95. Приняты данные от бортовых навигационных приборов: РСБН, ИНС, ВСС.
Воздушное судно за это время также изменило свое истинное местоположение. Новое истинное местоположение воздушного судна составляет:
55°01'23'' северной широты (с.ш.);
38°25'15'' восточной долготы (в.д.).
За время Δt второй итерации приняты навигационные данные от следующих бортовых приборов:
1. РСБН:
Ш1=55°13'36'' северной широты (с.ш.);
Д1=38°36'22'' восточной долготы (в.д.).
2. ИНС:
Ш2=55°32'36'' северной широты (с.ш.);
Д2=38°53'48'' восточной долготы (в.д.).
3. ВСС:
Ш3=54°37'23'' северной широты (с.ш.);
Д3=38°7'36'' восточной долготы (в.д.).
Блок комплексирования 11 считывает из второго блока постоянной памяти значения коэффициентов точности тех приборов, которые передали навигационные данные в текущей итерации:
1. РСБН: К1=6;
2. ИНС: К2=3;
3. ВСС: К3=15.
Затем блок комплексирования 11 сравнивает числовые значения упомянутых коэффициентов точности между собой и выбирает минимальный коэффициент: К2<K1<К3. Минимальный коэффициент соответствует инерциальной навигационной системе (ИНС), поэтому именно данные ИНС берутся в качестве исходных для комплексирования.
Далее определяются скомплексированные навигационные данные:
Шс = Ш2+ΔШ2;
Шс=55°32'36''-0°31'12''=55°1'24'' (с.ш.);
Дс = Д2+ΔД2;
Дс=38°53'48''-0°28'34''=38°25'14'' (в.д.).
Таким образом, с помощью комплексирования навигационных данных была устранена накопившаяся погрешность, что позволило с высокой точностью определить местоположение воздушного судна. Из сравнения измеренных координат воздушного судна с истинными координатами местоположения воздушного судна видно, что точности определения долготы и широты воздушного судна составляют:
- Для долготы: -1'';
- Для широты: +1''.
Эти значения находятся в пределах точности выбранного навигационного прибора (ИНС): 3''.
Полученные скомплексированные данные блок комплексирования 11 выдает на блок индикации 12, который отображает полученные данные. Здесь следует отметить, что аналогичным образом блок комплексирования 11 может комплексировать и другие навигационные данные, например высоту, скорость, ускорение и так далее.
Следует также отметить, что если за время Δt одной итерации данные от какого-либо прибора поступили несколько раз, для комплексирования используют последние принятые данные.
Кроме того, если за время Δt одной итерации никаких навигационных данных ни от одного прибора не поступило, в качестве скомплексированных навигационных данных Дс и Шс используются данные от предыдущей итерации, причем эти данные маркируют как устаревшие Дсу и Шсу и оповещают об этом потребителей навигационных данных.
Кроме того, при вычислении скомплексированных данных заранее задают значение Im, обозначающее предельное количество итераций с устаревшими данными, при получении устаревших данных блок комплексирования 11 подсчитывает количество I идущих подряд итераций с устаревшими данными и при выполнении неравенства I≥Im блок комплексирования 11 выдает на блок индикации 12 сообщение об отказе навигационных систем. В случае последующего приема от приборов навигационных данных (долготы и широты) блок комплексирования 11 осуществляет упомянутое выше вычисление скомплексированных данных и снимает сообщение об отказе навигационных систем, передает на блок индикации 12 скомплексированные навигационные данные Дс и Шс и обнулеяет значение I.
Можно также заранее задать в блоке комплексирования 11 линейную погрешность ΔL определения места аварии воздушного судна. После этого блок комплексирования 11 определяет также максимально допустимое время одного комплексирования (итерации) Δtm и заранее рассчитывает минимально допустимую скорость Vo по формуле:
Vo=ΔL/Δtm.
При этом перед каждой итерацией блок комплексирования 11 запрашивает от бортовых приборов скорость V движения воздушного судна и рассчитывает время итерации по формулам:
Δt=ΔL/V при V≥Vo,
Δt=Δtm при V<Vo.
Если при выполнении какой-либо итерации получены данные от всех N бортовых навигационных приборов и от приемника Global Position System и/или ГЛОНАСС 10, а время Δt одного комплексирования (итерации) еще не закончилось, то блок комплексирования 11 прекращает прием данных в текущей итерации и осуществляет упомянутое выше комплексирование принятых данных и передачу скомплексированных навигационных данных на блок индикации 12, а затем переходит к выполнению следующей итерации.
Теперь рассмотрим работу всего радиомаяка 1.
При подаче питания от бортсети аварийный радиомаяк 1 переходит в дежурный режим. При этом селектор питания 17 подает напряжение от бортсети через первый выход селектора питания 17 на блок 2 формирования сигнала аварийной перегрузки, на блок 3 ввода сигнала активизации радиомаяка, на пульт дистанционного управления 4, на приемник навигационных сигналов от системы Global Position System и/или ГЛОНАСС 11, на блок оперативной памяти 7, на второй блок постоянной памяти 14, на блок комплексирования навигационных данных 11, обеспечивая включение вышеперечисленных блоков. Кроме того, подачей напряжения от бортсети на третий выход селектора питания 17 обеспечивается включение блока индикации 14.
Навигационные данные от приемника Global Position System и/или ГЛОНАСС 10 поступают в блок комплексирования 11. В блок комплексирования 11 также поступают навигационные данные от бортовых навигационных приборов воздушного судна. После чего блок комплексирования 11 осуществляет описанное выше комплексирование данных (вычисление Дс и Шс и других данных).
Эти скомплексированные значения долготы и широты блок комплексирования 11 передает на блок индикации 12 потребителям.
Алгоритм комплексирования навигационных данных и значения коэффициентов K1...KN, характеризующих точности бортовых навигационных приборов, хранится во втором блоке постоянной памяти 14. Навигационные данные, поступившие от бортовых навигационных приборов и от приемника Global Position System и/или ГЛОНАСС 10, все вычисленные данные и погрешности, а также скомплексированные навигационные данные хранятся в оперативном запоминающем устройстве 7.
Повышение точности при комплексировании навигационных данных осуществляется за счет устранения накопившейся погрешности, а повышение надежности - за счет приема данных от бортовых навигационных приборов воздушного судна при отсутствии данных от приемника Global Position System и/или ГЛОНАСС 10 либо при пониженной точности этих данных.
От блока комплексирования 11 скомплексированные навигационные данные поступают на блок индикации 12 и выводятся на индикатор в кабине пилота, чем обеспечивается возможность использования радиомаяка в качестве резервного пилотажного прибора.
При внезапном пропадании бортового питания селектор питания 17 опрашивает датчик полета, находящийся на борту воздушного судна (шасси обжато для самолета), и определяет, находится ли воздушное судно в режиме полета. При наличии на четвертом входе селектора питания 17 сигнала «полет» радиомаяк 1 переходит в дежурный режим с питанием от блока автономного питания 18. При этом селектор питания 17 подает напряжение от блока автономного питания 18 на первый выход селектора питания 17, обеспечивая работу вышеперечисленных блоков. При пропадании бортового питания, отсутствии на четвертом входе селектора питания 17 сигнала «полет» и отсутствии на третьем входе селектора питания 17 сигнала активизации радиомаяка 1, что соответствует нормальному приземлению воздушного судна и штатному выключению бортовых систем, селектор питания 17 снимает напряжение со всех своих выходов, обеспечивая выключение всех упомянутых блоков (2, 3, 4, 7, 10, 11, 14, 15, 17, 8, 16, 13, 9, 5, 6) радиомаяка 1.
При работе от автономного источника питания 18 напряжение от селектора питания на блок индикации 12 (третий выход селектора питания 17) не подается. На блок индикации 12 можно подать питание с первого выхода селектора питания 17 через формирователь времени индикации 15 специальной командой с пульта дистанционного управления 4. Длительность подачи питания на блок индикации задается с помощью блока формирования времени индикации 15 и определяется минимально допустимым временем, необходимым для прочтения пилотом информации с индикатора.
В результате воздействия на формирователь аварийной перегрузки 2 либо на кнопку ручного включения, находящуюся в пульте дистанционного управления 4, блок 3 активизации радиомаяка вырабатывает сигнал активизации и передает его в селектор питания 17 и в формирователь кода времени 5, переводя радиомаяк 1 в аварийный режим. Этот сигнал активизации радиомаяка 1 приходит на третий вход селектора питания 17. По этому сигналу селектор питания 17 подает напряжение от бортсети, а при его отсутствии от блока автономного питания 18, на второй выход селектора питания 17, обеспечивая включение следующих блоков: формирователь кода времени 5, первый блок постоянной памяти 6, формирователь модулирующего сигнала 9, передатчик 8 спутникового канала, передатчик 13 приводного канала, дуплексер 16. По этому сигналу активизации радиомаяка 1 формирователь кода времени 5 начинает формировать кодовую посылку, а также отсчитывает времена сообщений, передаваемых на частотах 406 МГц, 121,5 МГц, и отсчитывает времена пауз между этими сообщениями. При формировании кодовой посылки постоянную часть кодовой посылки, содержащую серийный номер радиомаяка 1, идентификатор страны и авиакомпании, эксплуатирующей воздушное судно, некоторую служебную информацию формирователь кода времени получает из первого блока постоянной памяти 6. Переменную часть кодовой посылки, содержащую координаты (долготу и широту) места аварии воздушного судна, формирователь кода времени 5 получает от блока комплексирования навигационных данных 11.
Таким образом, кодовая посылка формируется немедленно после перехода в аварийный режим, без дополнительных операций по определению координат воздушного судна, что также способствует повышению надежности, так как при длительном времени формирования кодовой посылки радиомаяк 1 может получить дополнительные повреждения и вообще не сформировать кодовую посылку.
Для работы аварийного радиомаяка 1 на спутниковом канале на частоте 406 МГц кодовая посылка с выхода формирователя кода времени 5 поступает в передатчик 8 спутникового канала, который формирует радиоимпульсный сигнал, содержащий высокочастотную (406 МГц) фазоманипулированную кодовую посылку. Этот радиоимпульсный сигнал через дуплексер 16 поступает на радиопередающую антенну 20 и излучается в эфир.
Для работы радиомаяка 1 на приводном канале формирователь 9 модулирующего сигнала формирует общепринятый аварийный сигнал «вау-вау», который представляет собой частотно-модулированный сигнал в диапазоне частот от 300 Гц до 3 кГц (свип-тон). Этот сигнал поступает в передатчик 13 приводного канала. Передатчик 13 приводного канала преобразует этот сигнал в амплитудно-модулирующий высокочастотный (121,5 МГц) сигнал, модулируемый свип-тоном, который через дуплексер 16 поступает на радиопередающую антенну 20 и излучается в эфир.
Синхронизацией работы радиомаяка на спутниковом и приводном каналах управляет формирователь кода времени с помощью времяимпульсных сигналов, передаваемых в передатчики спутникового и приводного каналов.
Таким образом, заявленный в формуле и описанный здесь радиомаяк 1 позволяет достичь указанный выше технический результат, заключающийся в повышении точности определения координат места катастрофы воздушного судна и сокращении времени поиска потерпевших бедствие, повышении надежности работы радиомаяка, а также дополнительного технического результата, заключающегося в расширении функциональных возможностей радиомаяка.
Повышении точности определения координат места катастрофы воздушного судна, как следует из вышеописанного, осуществляется за счет комплексирования навигационных данных, поступающих как от бортовых приборов воздушного судна, так и от приемника навигационных сигналов от системы Global Position System и/или ГЛОНАСС 10. Комплексирование сигналов заключается в выборе наиболее точных данных и в компенсации ошибок определения местоположения воздушного судна, т.е. достигается повышение точности определения местоположения воздушного судна по сравнению с прототипом.
Повышение надежности работы радиомаяка достигается за счет того, что навигационные данные берутся из нескольких источников (см. п.1). Отказ приемника навигационных сигналов от системы Global Position System и/или ГЛОНАСС не приводит к невозможности определения местоположения воздушного судна, как это происходит в прототипе.
В отличии от прототипа, в патентуемом устройстве приемник навигационных сигналов от системы Global Position System и/или ГЛОНАСС 10 включен постоянно и постоянно определяет координаты воздушного судна, т.е. нет «холодного старта» или «первичного включения» (т.е. когда неизвестен регион, неизвестен альманах, неизвестны эфемериды, и GPS/ГЛОНАСС приемник должен все это установить перед тем, как определять координаты) приемника навигационных сигналов от системы Global Position System и/или ГЛОНАСС 10, за счет чего время подготовки радиомаяком кодовой посылки сокращается со 120 секунд до 10 миллисекунд. Это способствует повышению надежности работы радиомаяка, т.к. во время аварии за 120 секунд воздушное судно может получить дополнительные повреждения, из-за чего радиомаяк может выйти из строя и вообще не сформировать кодовую посылку.
Расширение функциональных возможностей достигается за счет вывода навигационной информации на блок индикации, т.е. появляется возможность использования радиомаяка в качестве резервного пилотажного прибора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| АВАРИЙНО-СПАСАТЕЛЬНЫЙ РАДИОМАЯК | 2010 |
|
RU2438144C1 |
| Способ контроля промысла водных биологических ресурсов, мониторинговый навигационно-связной комплекс промыслового судна и центр обработки данных для осуществления способа | 2016 |
|
RU2624361C1 |
| АВАРИЙНЫЙ РАДИОМАЯК | 1999 |
|
RU2157546C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ УСТРОЙСТВО СБОРА, ОБРАБОТКИ И ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ | 2017 |
|
RU2683624C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА С КОМБИНИРОВАННЫМ ИСПОЛЬЗОВАНИЕМ СПУТНИКОВЫХ ДАННЫХ | 2007 |
|
RU2334199C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ И ПОСАДКИ | 2002 |
|
RU2236020C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| УСТРОЙСТВО И СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО РАСПИСАНИЮ | 2013 |
|
RU2525606C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2292289C1 |
Заявленное изобретение относится к аварийным радиомаякам, используемым для обнаружения терпящих бедствие различных, например, воздушных судов. Достигаемым техническим результатом заявленного изобретения является повышение точности определения координат места катастрофы воздушного судна и сокращение времени поиска потерпевших бедствие, повышение надежности работы радиомаяка. Для этого радиомаяк содержит блок ввода сигнала активизации радиомаяка, блок формирования сигнала аварийной перегрузки, первый блок постоянной памяти, формирователь кода времени, передатчик спутникового канала, формирователь модулирующего сигнала, передатчик приводного канала, дуплексер, приемник навигационных сигналов от системы GPS и/или ГЛОНАСС, блок оперативной памяти, блок автономного питания, селектор питания, пульт дистанционного управления, блок комплексирования навигационных данных и второй блок постоянной памяти. 5 з.п. ф-лы, 1 табл., 3 ил.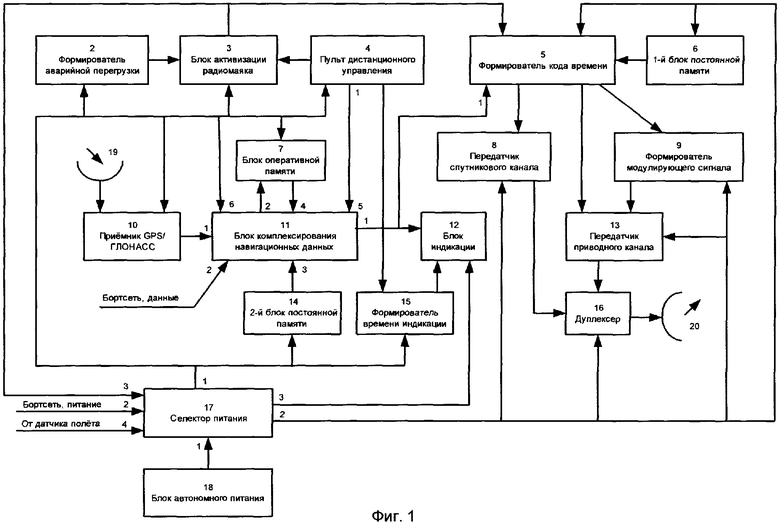
а) принимает от приемника GPS и/или ГЛОНАСС данные долготы, широты и величину точности (Кп) определения этих значений долготы и широты в течение упомянутого времени Δt, при этом если Кп≥0,95, то эти принятые значения долготы и широты принимает как эталонные;
б) принимает навигационные данные, а именно, долготу и широту, из упомянутой бортовой сети передачи данных;
в) вычисляет погрешности определения долготы ΔД и широты ΔШ для каждого навигационного прибора, выдающего навигационные данные в упомянутую бортовую сеть передачи данных, по следующим формулам:
ΔДN = Дэ - ДN,
ΔШN = Шэ - ШN,
где Дэ - эталонное значение долготы;
Шэ - эталонное значение широты;
ДN - значение долготы, полученное из упомянутой бортовой сети передачи данных от соответствующего навигационного прибора, установленного на борту воздушного судна;
ШN - значение широты, полученное из упомянутой бортовой сети передачи данных от соответствующего навигационного прибора, установленного на борту воздушного судна;
N - порядковый номер навигационного прибора, расположенного на борту воздушного судна и выдающего навигационные данные в бортовую сеть передачи данных,
а после окончания времени Δt блок комплексирования навигационных данных при Кп≥0,95 принимает
Дс = Дэ,
Шс = Шэ,
где Дс - скомплексированная долгота;
Шс - скомплексированная широта,
а при Кп<0,95 или при невозможности приема в течение упомянутого времени Δt навигационных данных от приемника GPS и/или ГЛОНАСС блок комплексирования навигационных данных определяет минимальное значение коэффициента точности Км из заранее записанных во второй блок постоянной памяти коэффициентов K1...KN, соответствующих заранее заданным точностям бортовых навигационных приборов, причем блок комплексирования навигационных данных учитывает коэффициенты только тех упомянутых бортовых навигационных приборов, которые передали свои навигационные данные за упомянутое время Δt, после чего блок комплексирования навигационных данных вычисляет окончательные скомплексированные значения долготы Дс и широты Шс по формулам
Дс = Дм + ΔДм,
Шс = Шм + ΔШм,
где Дм - значение долготы М-го бортового навигационного прибора, имеющего минимальное значение упомянутого коэффициента точности Км;
Шм - значение широты М-го бортового навигационного прибора, имеющего минимальное значение упомянутого коэффициента точности Км;
ΔДм - накопившаяся погрешность значения долготы М-го бортового навигационного прибора, вычисленная блоком комплексирования навигационных данных во время последней итерации, в которой Кп≥0,95, и запомненная в блоке оперативной памяти;
ΔШм - накопившаяся погрешность значения широты М-го бортового навигационного прибора, вычисленная блоком комплексирования навигационных данных во время последней итерации, в которой Кп≥0,95, и запомненная в блоке оперативной памяти;
М - номер бортового навигационного прибора, соответствующего упомянутому коэффициенту точности Км;
| АВАРИЙНЫЙ РАДИОМАЯК | 1999 |
|
RU2157546C1 |
| СИСТЕМА ГЛОБАЛЬНОГО АВТОМАТИЧЕСКОГО КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПРИ НОРМАЛЬНЫХ И ЭКСТРЕМАЛЬНЫХ УСЛОВИЯХ | 2000 |
|
RU2158003C1 |
| Способ определения с помощью исз координат аварийной радиостанции | 1972 |
|
SU465993A1 |
| US 5367306, 22.11.1994 | |||
| JP 7306256, 21.11.1995 | |||
| US 6388617 B1, 14.05.2002. | |||

