Заявленное изобретение относится к области машиностроения и может быть использовано в технике, где необходимо осуществить преобразование возвратно-поступательного движения поршня, ползуна и других элементов механизма во вращательное движение вала. Его можно использовать для создания двигателей внутреннего сгорания, паровых двигателей и других двигателей с высоким кпд.
ХАРАКТЕРИСТИКА АНАЛОГА
Известен кулачково-рычажный механизм /патент РФ №2253779, МКИ F01B 11/10, опубл. 10.06.2005/. Он содержит вал с кулачком асимметричной формы, два рычага, одни концы которых закреплены в корпусе, а на вторых концах установлены подшипники в обоймах. Оси подшипников в моменты их верхнего положения и нижнего положения расположены на главной оси механизма. Главная ось механизма проходит через центр вращения вала, самую дальнюю точку кулачка от оси вращения вала, оси подшипников в обоймах в моменты их верхнего и нижнего положения и совпадает с осью Y. Расстояние между осями подшипников сохраняется постоянным. Рычаги соединены связкой, необходимой для создания механизма.
КРИТИКА АНАЛОГА
Кулачково-рычажный механизм можно использовать для создания двигателей внутреннего сгорания с постоянной частотой вращения вала или с малым изменением частоты вращения, которые найдут применение в системах энергоснабжения, авиации, на судах. Двигатели могут быть двухцилиндровые, четырехцилиндровые, шестицилиндровые, оппозитные двухтактные с турбонаддувом и впрыском топлива. Два цилиндра должны работать на один кулачок. В четырехцилиндровом двигателе ось второго кулачка смещается на 90° относительно оси первого кулачка. В шестицилиндровом двигателе оси трех кулачков смещены на 120°.
Более всего этот механизм подходит для паровых двигателей тоже оппозитных, оба цилиндра которых работают на один кулачок. Если применить давление пара 2 мПа и более, то никакие двигатели внутреннего сгорания ни в какое сравнение не идут с паровыми двигателями.
В двигателях с быстрым изменением числа оборотов вала, в одноцилиндровых двигателях, в четырехтактных двигателях этот механизм применять нельзя: на больших оборотах вала могут возникать проблемы, связанные с большой асимметрией механизма. Особенно при прохождении самой дальней точки кулачка /А/ через зону контакта с обоймой подшипника нижнего рычага.
ЗАДАЧА ИЗОБРЕТЕНИЯ
Изменить форму кулачка для того, чтобы устранить большую асимметрию и устранить проблемы, возникающие при прохождении самой дальней точки кулачка /А/ через зону контакта с обоймой подшипника нижнего рычага, что позволит при одинаковых параметрах поршней, цилиндров и т.д. от двигателя с заявленным механизмом получить значительно большую мощность. В этом и заключается положительный эффект от применения заявленного механизма.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
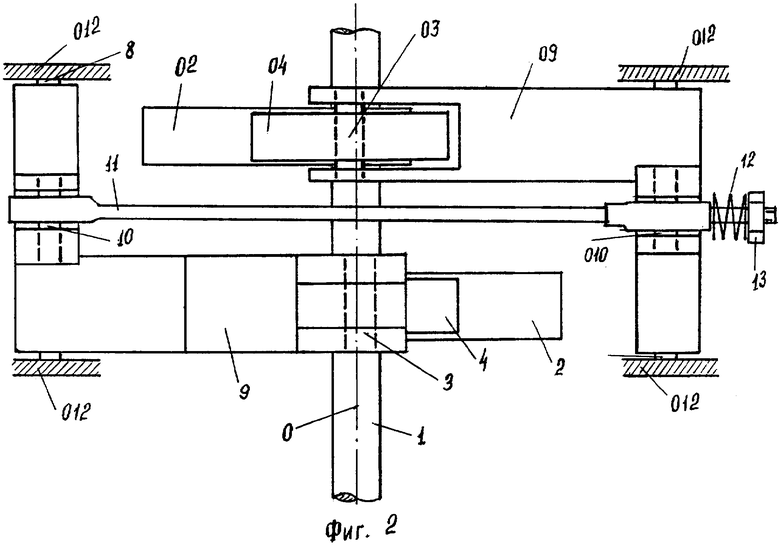
Поставленная задача решается за счет того, что кулачково-рычажный механизм содержит систему /фиг.1/ рабочего кулачка 2, находящуюся в верхнем положении, и систему вспомогательного кулачка 02, находящуюся в нижнем положении. Нерабочий рычаг 09 крепится в корпусе на оси 08 симметрично оси 8 крепления в корпусе рабочего рычага относительно главной оси механизма, центр оси 03 крепления подшипника 05 в обойме 04 находится на главной оси Y механизма в моменты его верхнего положения и нижнего положения. На конструктивных элементах рычагов на осях 10 и 010 крепится стяжная штанга 11 с пружиной 12, обеспечивающей контакт поверхностей обойм 4 и 04 подшипников рычагов с поверхностями кулачков. Рабочий кулачок 2 имеет асимметричную форму. Форма нерабочей поверхности 16 рабочего кулачка 2 образована дугой, ось рабочего кулачка ОА повернута против направления вращения на 35-45° относительно главной оси Y механизма. Поверхность рабочего кулачка 2 от точки А до пересечения с главной осью Y механизма, до соединения с дугой нерабочей поверхности 16, образована дугой. Вспомогательный кулачок 02, имеющий некомпенсирующую поверхность, образованную дугой 016, и компенсирующую поверхность К, обеспечивающую постоянным расстояние между центрами осей крепления 10 и 010 в рычагах 9 и 09 связной штанги 11 в период движения подшипника 5 в обойме 4 рабочего рычага 9 от верхнего положения к нижнему положению, а подшипника 05 в обойме 04 нерабочего рычага 09 от нижнего положения в верхнее положение.
ПРИМЕР КОНКРЕТНОГО ВЫПОЛНЕНИЯ
Для конкретного выполнения необходимы исходные данные: величина хода поршня /1/ и диаметр вала /d/. На бумаге проводятся оси Х и Y /фиг.1/. Пересечение их в точке /О/ будет центром вала. Эта точка обозначает и ось вращения вала. От центра /О/ радиусом d/2 проводится окружность, обозначающая вал /1/. От оси Y влево откладывается 35-45° в I секторе /на фиг.1 указаны сектора I, II, III, IY/ и находится точка /Л/. Через точки /О/ и /Л/ проводится прямая линия. От центра /О/ на линии /ОЛ/ откладывается отрезок, равный 1+d/2, и находится точка /А/, где 1 - расстояние от верхнего положения поршня до нижнего положения или величина хода поршня. Это будет самая дальняя точка кулачка от оси вращения /О/. Линия /ОА/ является осью кулачка. Затем выбирается радиус /R/ рабочей поверхности кулачка, он принимается равным (0,75-0,85)l. Радиусом /R/ от точек /А/ и /Н/ вправо от оси /ОА/ наносятся дуги.
На пересечении этих дуг находится точка /М/. Эта точка будет центром рабочей поверхности кулачка. Радиусом /R/ от точки /Н/ до точки /А/ проводится дуга /Р/. Эта дуга является рабочей поверхностью /Р/ кулачка. Относительно оси /О/, радиусом, равным l+d/2, от точки /А/ до пересечения с осью Y проводится дуга, которая является тоже рабочей поверхностью кулачка. Затем откладывается отрезок, равный (l+d)/2, от точки /Н/ вверх по оси Y и находится точка /6/. От этой точки радиусом, равным (l+d)/2, проводится дуга от точки /Н/ до точки пересечения дуги рабочей поверхности с осью Y. Эта дуга обозначает нерабочую поверхность /16/ рабочего кулачка. Таким образом, определяется форма рабочего кулачка /2/.
От точки /О/ вверх на главной оси механизма Y откладывается отрезок, равный d/2 плюс радиус обоймы подшипника, и находится точка /03/. От этой точки вверх на оси Y откладывается отрезок, равный /1/. Так находится точка /3/. Между точками /03/ и /3/ находится середина 1/2 и точка обозначается цифрой /7/. Через эту точку /7/ проводится прямая линия, параллельная оси X.
Длина рычагов определяется из расчета: чем больше их длина, тем меньше будет отклонение в стороны нижней части шатуна при движении его от верхнего положения к нижнему положению, и, наоборот, при движении его от нижнего положения к верхнему положению. От точки /3/ отрезком, равным длине рычага, наносится дуга и на пересечении ее с прямой, проведенной через точку /7/, в первом секторе (1) находится точка /8/. Эта точка является центром оси крепления рабочего рычага /9/ в корпусе. Симметрично точке /8/ относительно оси Y во втором секторе (11) находится точка /08/. Эта точка является центром оси крепления нерабочего рычага в корпусе. Затем определяется рабочий рычаг /9/ с конструктивными элементами: на дальнем от оси крепления рычага в корпусе крепится на оси /14/ шатун /15/, а на оси /3/ крепится подшипник /5/ в обойме /4/, на другом конструктивном элементе на оси /10/ крепится стяжная штанга /11/. Затем обозначается нерабочий рычаг /09/. На конце его, закрепленном в корпусе, есть рычаг. На конце его, на оси /010/, крепится элемент не жесткого крепления стяжной штанги с пружиной /12/ и гайкой /13/. На дальнем конце от оси крепления нерабочего рычага /09/ в корпусе крепится на оси /03/ подшипник /05/ в обойме /04/. Расстояние между точками /8 и 10/ и точками /08 и 010/ определяется изготовителем.
Размеры рабочего рычага /9/ и нерабочего рычага /09/, подшипников в обоймах абсолютно одинаковы. Закреплены в корпусе симметрично главной оси механизма Y, поэтому при перемещении рабочего подшипника /5/ из верхнего положения в нижнее положение, центр оси /3/ крепления его в рычаге /9/ переместится в нижнее положение и займет место точки /03/. При перемещении нерабочего подшипника /05/ из нижнего положения в верхнее положение, центр оси /03/ крепления его в рычаге /09/ переместится в верхнее положение и займет положение точки /3/.
Вниз по оси Y от точки /О/ откладывается отрезок, равный l+d/2, и находится точка /АА/. Это самая дальняя точка вспомогательного кулачка от оси вращения /O/.
Затем находится середина между точками /АА/ и /НН/ (l+d)/2 и определяется точка /06/. От этой точки, радиусом, равным (l+d)/2, проводится дуга от точки /НН/ в третьем секторе (111) до точки /АА/. Эта дуга обозначает некомпенсирующую поверхность /016/ вспомогательного кулачка. Компенсирующая поверхность /К/ вспомогательного кулачка /02/ определяется на собранном из фанеры макете. Стяжная штанга устанавливается без пружины. Компенсирующую часть кулачка отмеряют с запасом. Затем кулачковый вал начинают проворачивать в сторону, указанную стрелкой от точки /М/. При этом необходимо следить, чтобы обойма /4/ подшипника /5/ рабочего рычага /10/ находилась постоянно в контакте с рабочей поверхностью /Р/ рабочего кулачка /2/. Поворачивая кулачок на небольшой угол, отмечают точки контакта обоймы /04/ подшипника /05/ нерабочего рычага /09/ с будущей компенсирующей поверхностью /К/ вспомогательного кулачка /02/. Эти точки будут находиться на пересечении наружной поверхности обоймы /04/ подшипника /05/ с прямой, проведенной между точками /03/ и /06/. Затем точки соединяются линией. Таким образом определяется компенсирующая поверхность /К/ вспомогательного кулачка /02/.
Вспомогательный кулачок можно заменить эксцентриком с теми же размерами по оси /ОА/. В этом случае неравномерность расстояния между точками /10/ и /010/ при работе механизма будет регулироваться работой пружины. Это упрощает механизм.
ПРИНЦИП РАБОТЫ КУЛАЧКОВО-РЫЧАЖНОГО МЕХАНИЗМА.
Принцип работы изобретения мало отличается от принципа работы механизма-прототипа /патент РФ №2253779/. Отличие состоит в том, что при движении подшипника в обойме рабочего рычага от верхнего положения в нижнее, подшипник в обойме нерабочего рычага движется от нижнего положения в верхнее положение, и, наоборот, при движении подшипника в обойме рабочего рычага из нижнего положения в верхнее положение, подшипник нерабочего рычага движется от верхнего положения в нижнее положение.
ПОЛОЖИТЕЛЬНЫЙ ЭФФЕКТ
Заявленный механизм является более совершенным по сравнению с прототипом и может быть использован для изготовления любых двигателей: внутреннего сгорания, паровых двигателей и других двигателей.
ПЕРЕЧЕНЬ ЧЕРТЕЖЕЙ
На фиг.1 изображен заявленный механизм в сборе. На фиг.2 изображена система рычагов 9 и 09 со связывающей штангой 11.
На чертежах изображены: ось вращения О, вал 1, рабочий кулачок 2, ось крепления рабочего подшипника в рычаге 3, обойма рабочего подшипника 4, рабочий подшипник 5, центр нерабочей поверхности рабочего кулачка 6, точка, определяющая положение центров осей крепления 8 и 08 относительно оси X, ось крепления рабочего рычага в корпусе 8, рабочий рычаг 9, ось крепления стяжной штанги в рабочем рычаге 10, стяжная штанга 11, пружина 12, гайка 13, ось 14 крепления шатуна 15 к рабочему рычагу, нерабочий кулачок 02, ось крепления нерабочего подшипника в нерабочем рычаге 03, обойма нерабочего подшипника 04, обойма нерабочего подшипника 05, центр не компенсирующей поверхности вспомогательного кулачка 06, ось крепления нерабочего рычага в корпусе 08, нерабочий рычаг 09, ось крепления стяжной штанги в нерабочем рычаге 010, самая дальняя точка от оси вращения рабочего кулачка А, ОА - ось рабочего кулачка, O-АА - ось вспомогательного кулачка, самая дальняя точка от оси вращения вспомогательного кулачка АА, центр рабочей поверхности рабочего кулачка М, дугами со стрелками указано направление вращения кулачков. Главная ось механизма совпадает с осью Y.
Компенсирующей поверхностью вспомогательного кулачка является та, которая находится в контакте с поверхностью обоймы подшипника нерабочего рычага в период нахождения в контакте обоймы подшипника рабочего рычага с рабочей поверхностью рабочего кулачка. Форма ее позволяет сохранять постоянным расстояние между точками 10 и 010.
Для увеличения площади контакта между поверхностями обойм подшипников с поверхностями кулачков, поверхности обойм и кулачков выполняются зубчатыми, как в механизме-прототипе /патент РФ №2253779/.
Изобретение позволяет при одинаковых параметрах поршней, цилиндров и т.д. от двигателя с заявленным механизмом получить значительно большую мощность.
| название | год | авторы | номер документа |
|---|---|---|---|
| КУЛАЧКОВО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2003 |
|
RU2253779C1 |
| Устройство для непрерывной намотки нити | 1983 |
|
SU1137046A1 |
| Устройство для изготовления, наполнения продуктом и запечатывания пакетов из материала,включающего термопластик | 1983 |
|
SU1422989A3 |
| Устройство для определения динамических характеристик абразивного инструмента | 1982 |
|
SU1146179A1 |
| СТАНОК ДЛЯ ОБРУБКИ, КЛЕПКИ, ТРАМБОВКИ | 2009 |
|
RU2412783C1 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ | 2001 |
|
RU2211344C1 |
| ВИБРОАГРЕГАТ ГЛУБИННО-ПОВЕРХНОСТНОГО ВОЗДЕЙСТВИЯ ДЛЯ УПЛОТНЕНИЯ ФОРМУЮЩИХСЯ СМЕСЕЙ ПРИ ИЗГОТОВЛЕНИИ АРМИРОВАННЫХ И НЕАРМИРОВАННЫХ ИЗДЕЛИЙ И КОНСТРУКЦИЙ | 1993 |
|
RU2081980C1 |
| Швейный полуавтомат для выполнения коротких строчек | 1976 |
|
SU616351A1 |
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |
| Устройство для резки материалов неправильной формы,преимущественно полупроводниковых | 1974 |
|
SU523802A1 |
Механизм преобразования может быть использован в различных двигателях. Механизм содержит вал, рабочий и нерабочий рычаги и рабочий и вспомогательный кулачки, установленные в верхнем и нижнем положениях соответственно; на концах рычагов на осях закреплена стяжная штанга с пружиной с возможностью контакта поверхностей обойм подшипников с поверхностями кулачков, причем форма нерабочей поверхности рабочего кулачка образована дугой, его ось повернута против направления вращения на 35-45° относительно главной оси механизма, а поверхность от самой дальней точки от оси вращения до пересечения с главной осью механизма до соединения с нерабочей поверхностью образована дугой, вспомогательный кулачок имеет некомпенсирующую поверхность и компенсирующую поверхность с возможностью обеспечения постоянным расстояния между центрами осей крепления в рычагах стяжной штанги в период движения подшипника в обойме рабочего рычага от верхнего положения в нижнее положение и подшипника в обойме нерабочего рычага от нижнего положения в верхнее положение. Изобретение устраняет асимметрию, что обеспечивает повышение мощности двигателя с таким механизмом. 2 ил.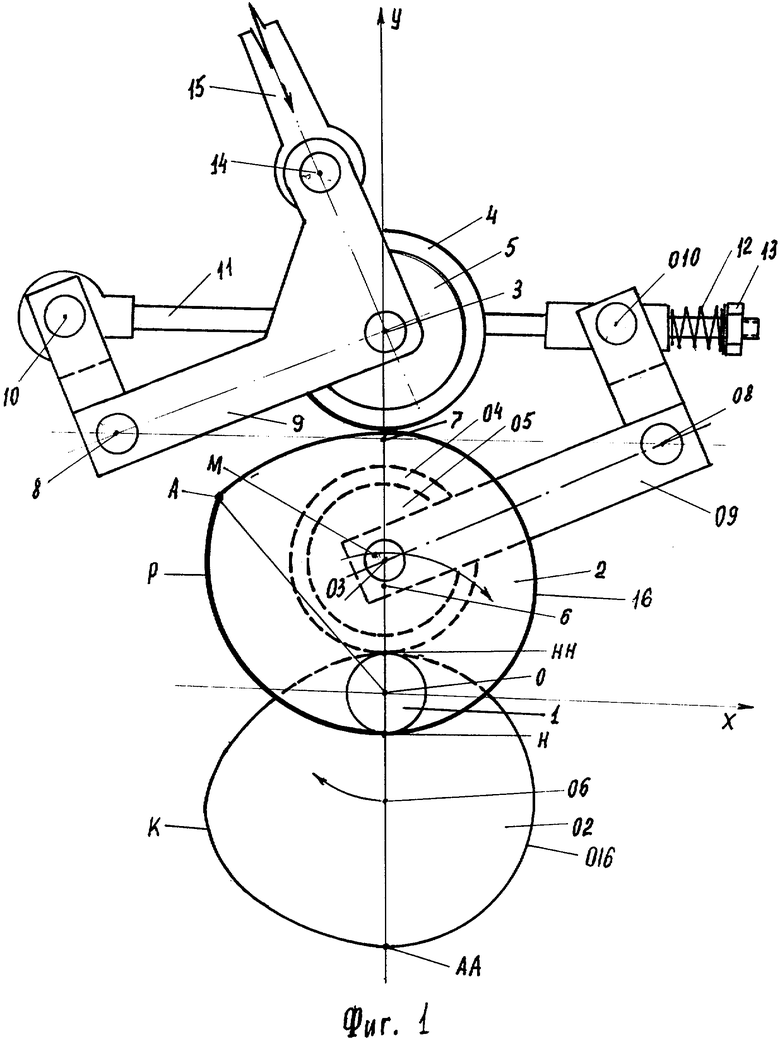
Кулачково-рычажный механизм, содержащий вал, рычаги и рабочий кулачок, установленный в верхнем положении, отличающийся тем, что он снабжен вспомогательным кулачком, установленным в нижнем положении, нерабочий рычаг закреплен в корпусе на оси симметрично оси крепления в корпусе рабочего рычага относительно главной оси механизма, центр оси крепления подшипника в обойме установлен с возможностью расположения на главной оси механизма в моменты его верхнего и нижнего положений, на концах рычагов на осях закреплена стяжная штанга с пружиной с возможностью контакта поверхностей обойм подшипников с поверхностями кулачков, причем форма нерабочей поверхности рабочего кулачка образована дугой, ось рабочего кулачка повернута против направления вращения на 35-45° относительно главной оси механизма и поверхность кулачка от самой дальней точки от оси вращения до пересечения с главной осью механизма до соединения с нерабочей поверхностью образована дугой, вспомогательный кулачок имеет некомпенсирующую поверхность, образованную дугой, и компенсирующую поверхность с возможностью обеспечения постоянным расстояния между центрами осей крепления в рычагах стяжной штанги в период движения подшипника в обойме рабочего рычага от верхнего положения в нижнее положение и подшипника в обойме нерабочего рычага от нижнего положения в верхнее положение.
| КУЛАЧКОВО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2003 |
|
RU2253779C1 |
| КУЛАЧКОВЫЙ МЕХАНИЗМ С ДВУМЯ ТОЛКАТЕЛЯМ! | 0 |
|
SU174480A1 |
| КУЛАЧКОВЫЙ МЕХАНИЗМ | 2002 |
|
RU2205999C1 |
| RU 2071005 C1, 27.12.1996. | |||

