Изобретение относится к области измерения магнитного момента (ММ), в частности ММ меры ММ в виде многовитковой катушки квадратной формы, по которой протекает электрический ток.
Государственная поверочная схема для средств измерения ММ и магнитной восприимчивости [ГОСТ 8.231.85] формально предусматривала образцовые и рабочие меры ММ в виде катушек на диапазон 1-200 Ам2 классов точности 0.1-0,5%. Однако, в действительности, мер ММ с такими значениями и такими погрешностями не было из-за отсутствия обоснованной методики передачи размера ММ от государственного первичного эталона образцовым и рабочим мерам ММ и отсутствия достаточно точного метода измерения ММ. В.Н.Хорев, один из авторов книги «Средства измерения параметров магнитного поля» [Ленинград. Энергия. 1979. С.66], указывал, что класс точности мер ММ в диапазоне 0.1-10 Ам2 составлял от 0.05 до 10%. Следует добавить, что по соображениям технологии изготовления каркасов для многовитковых катушек меры с габаритами до 1 м изготавливаются круглыми и квадратными, при габаритах свыше 1 м - преимущественно квадратными [Там же, С.44].
Таким образом, классы точности мер ММ 0.1-0.5% в диапазоне 1-200 Ам2, предусмотренные ГОСТ 8.231.85, являются требуемыми, но недостигнутыми на практике классами. В дальнейшем все характеристики, приводимые ниже, соответствуют диапазону 10 Ам2 при уровне требований по точности 0.5%.
Известен магнитометрический способ измерения ММ [Семенов В.Г и Сонина В.Э. Анализ методов измерения магнитных моментов // Метрология. 1992. №8. С.7 и С.10], Он включает две разновидности, двухточечный и двенадцатиточечный методы измерения.
Двухточечный метод может применяться для измерения ММ мер ММ благодаря своей простоте и оперативности. Однако, как показал анализ [там же С.32, 35; см. также ниже Табл.1], результирующая погрешность двухточечного метода для тела компактной формы, которым является мера ММ типичных размеров, составляет 9%. Причем в результирующей погрешности преобладает методическая составляющая или погрешность от недипольности катушки, равная 6%.
Двенадцатиточечный метод измерения ММ [там же, С.10] обеспечивает заметное повышение точности до 1,5% за счет снижения методической составляющей погрешности до 0,5% [см. ниже Табл.2 и 4]. Но эта разновидность магнитометрического способа не является ни простой, ни оперативной, т.к. требует 12-ти точек наблюдения, особым образом располагаемых вокруг испытуемого тела. Т.е. метод не может быть развернут в полевых условиях и требует лабораторного помещения достаточного объема. К тому же, несмотря на повышение точности, двенадцатиточечный метод все-таки не обеспечивает требуемого уровня точности 0.5%.
Очевидно, что путь к дальнейшему повышению точности магнитометрического способа лежит через снижение доминирующей методической составляющей результирующей погрешности.
Итак, магнитометрический способ, представленный двумя разновидностями [Семенов В.Г. и Сонина В.Э. 1992. С.7 и 10], принят в качестве ближайшего аналога заявляемого способа по совокупности существенных признаков.
Известный способ определения ММ квадратной катушки с током включает измерения параметров индукции магнитного поля катушки и радиус-векторов между центром катушки и каждой точкой наблюдения индукции и вычисление момента по измеренным величинам.
Причиной, препятствующей достижению указанного ниже технического результата при использовании известного способа, является большая методическая погрешность, которая возрастает с приближением точек наблюдения к центру катушки.
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности измерения ММ квадратной катушки в диапазоне 10 Ам2 до результирующих погрешностей порядка 0.5%.
Технический результат, получаемый при осуществлении изобретения, заключается в существенном снижении методической составляющей результирующей погрешности при меньших удалениях точек наблюдения от центра в сравнении с известным способом. Указанный результат достигается тем, что в заявляемом способе определения ММ квадратной катушки с током путем измерения параметров индукции магнитного поля катушки и радиус-векторов между центром катушки и каждой точкой наблюдения индукции и вычисления момента по измеренным величинам, в отличие от известного способа, дополнительно измеряют длину стороны усредненного витка катушки, рассчитывают площадь витка и его постоянную по магнитному моменту в условиях определения момента, после чего результат определения корректируют умножением на отношение площади к модулю постоянной.
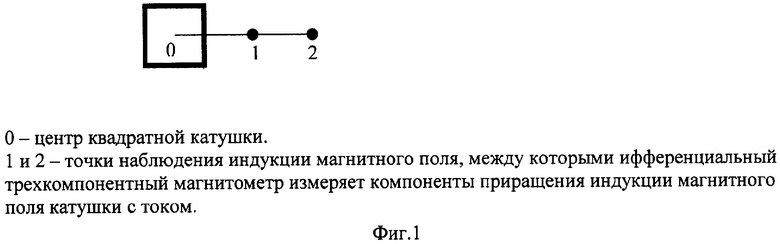
На фиг.1 изображена схема измерения ММ катушки двухточечной разновидностью известного способа.
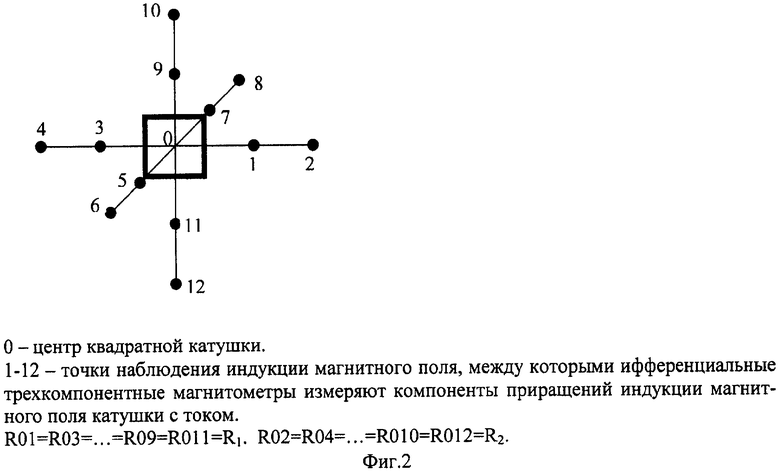
На фиг.2 изображена схема измерения ММ катушки двенадцатиточечной разновидностью известного способа.
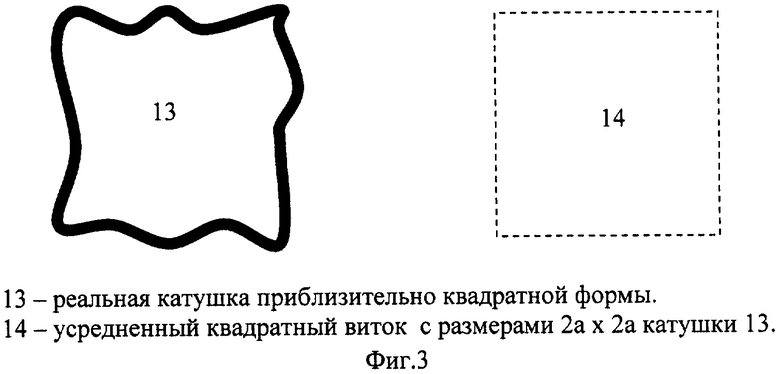
На фиг.3 изображена иллюстрация концепции усредненного витка квадратной катушки.
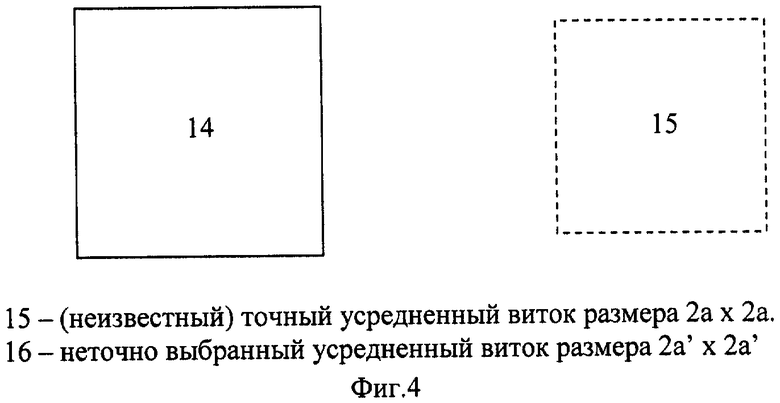
На фиг.4 изображена иллюстрация к расчету погрешностей измерения при неточном выборе размера усредненного витка.
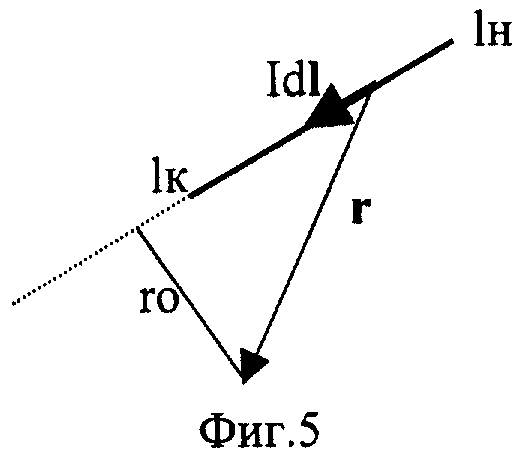
На фиг.5 изображена иллюстрация к применению закона Био-Савара-Лапласа.
Схема на фиг.1 включает квадратную катушку с центром 0 и расположенные на одной оси с центром 0 точки наблюдения 1 и 2 компонент приращения индукции магнитного поля катушки, или точки расположения соответственно измерительного и компенсационного датчиков трехкомпонентного дифференциального магнитометра (магнитометр на чертеже не показан, чтобы не загромождать чертеж).
Схема на фиг.2 включает квадратную катушку с центром 0. Двенадцать точек наблюдения компонент приращения индукции магнитного поля катушки или точек расположения 6-ти измерительных и 6-ти компенсационных датчиков 6-ти трехкомпонентных дифференциальных магнитометров расположены на трех взаимно ортогональных осях, проходящих через центр 0. Точки 1 и 2, 3 и 4 расположены на одной оси, точки 5 и 6, 7 и 8 - на другой оси, точки 9 и 10, 11 и 12 - на третьей оси. Измерительные датчики 1, 3, 5, 7, 9 и 11 равноудалены от центра 0 на расстояние R1, компенсационные датчики 2, 4, 6, 8, 10 и 12 - на расстояние R2.
На фиг.3 дано утрированное изображение реальной многовитковой катушки 13 приблизительно квадратной формы 13 и соответствующий ей усредненный (идеализированный) виток квадратной формы 14 размера 2а×2а. Размер идеализированного витка выбирают из соотношения - сумма проекций площадей всех w витков катушки на ее главную ось равна w×2а×2а. Разумеется, сумма неизвестна, соответственно неизвестен и точный размер 2а. Но приближенное значение размера усредненного витка 2а' может быть определено из внешних обмеров катушки.
На фиг.4 показаны точный (неизвестный) виток 14 с размерами 2а×2а и его выбранная аппроксимация 15 с размерами 2а'×2а'.
Заявляемый способ осуществляется следующим образом. Уравнение измерения ММ двухточечной разновидностью (см. фиг.1) известного (магнитометрического) способа имеет вид [Семенов В.Г. и Сонина В.Э. 1992. С.7]:

где Mu=М+ΔМ1 - результат измерения ММ, Ам2;
М - действительное значение ММ катушки с током, Ам2;
ΔМ1 - некоторая методическая погрешность уравнения измерения (1), вызванная тем, что катушка с током в силу своих размеров отличается от точечного диполя, Ам2;
μ0=4π×10-7 Гн/м - магнитная постоянная;
 - расстояние между центром 0 и точкой 1, м;
- расстояние между центром 0 и точкой 1, м;
s=(R1/R2)3;
 - расстояние между центром 0 и точкой 2, м;
- расстояние между центром 0 и точкой 2, м;
 - единичное направление радиус-вектора R01;
- единичное направление радиус-вектора R01;
 - направляющие косинусы единичного вектора n;
- направляющие косинусы единичного вектора n;
 - диада из векторов n, особая группа тензоров 2-го ранга;
- диада из векторов n, особая группа тензоров 2-го ранга;
ΔB12 - приращение индукции магнитного поля, созданного катушкой с током между точками 1 и 2.
Уравнение измерения ММ двенадцатиточечной разновидностью (см. фиг.2) известного (магнитометрического) способа имеет вид, как показано в [Семенов В.Г. и Сонина В.Э. 1992. С.10]:

где Mu=М+ΔМ2 - результат измерения ММ, Ам2;
М - действительное значение ММ катушки с током, Ам2;
 - некоторая методическая погрешность уравнения измерения (2), Ам2;
- некоторая методическая погрешность уравнения измерения (2), Ам2;
остальные обозначения аналогичны обозначениям при уравнении (1) (см. также фиг.1 и 2).
Размер матрицы в квадратных скобках в правой части (2) - 3×9, в круглых - 9×1.
Особенность уравнения (2) в том, что оно заметно точнее (1) или размер методической погрешности (2) значительно меньше методической погрешности уравнения (1)  Уравнение (2) построено так, что в разложении методической погрешности отсутствуют все четные члены и первый нечетный член - октупольный для произвольного источника, ММ которого подлежит измерению.
Уравнение (2) построено так, что в разложении методической погрешности отсутствуют все четные члены и первый нечетный член - октупольный для произвольного источника, ММ которого подлежит измерению.
Таким образом, известный способ основан на измерении параметров индукции магнитного поля катушки с током и на измерении радиус-векторов между центром катушки и точками наблюдения индукции. Обратим внимание на то, что уравнения (1) и (2), будучи отягощены своими методическими погрешностями ΔМ1 и ΔМ2, дают принципиально неточный результат измерения ММ Mu даже при точных измерениях параметров индукции и расстояний. Казалось бы, эти методические погрешности могут быть снижены удалением точек наблюдения от центра. Однако имеют место погрешности измерения ММ по (1) и (2) от инструментальных аддитивных погрешностей измерения приращений магнитной индукции, которые препятствуют удалению точек наблюдения [Семенов В.Г. и Сонина В.Э. 1992. С.21, 22]:

где σMi(1) - СКО инструментальной аддитивной погрешности измерения компоненты ММ по уравнению (1), среднее на компоненту, Ам2;
σB - СКО инструментальной аддитивной погрешности измерения компоненты индукции датчиком дифференциального магнитометра, Тл;

где σMi(2) - СКО инструментальной аддитивной погрешности измерения компоненты ММ по уравнению (2), среднее на компоненту, Ам2.
Как видно из (3) и (4), как бы ни было мало σB, с ростом R1, или с удалением точек наблюдения σMi(1) и σMi(2) быстро достигают внушительных размеров. Обратим внимание на то, что, несмотря на большее число точек наблюдения в (2), σMi(2) меньше σMi(1) в  .
.
Итак, методические погрешности снижаются примерно пропорционально первой (для (1)) и четвертой (для (2)) степеням R1:  и
и  инструментальные СКО σMi(1) σMi(2) растут пропорционально третьей степени R1.
инструментальные СКО σMi(1) σMi(2) растут пропорционально третьей степени R1.
Кроме того, имеют место погрешности измерения ММ по (1) и (2) от погрешностей измерения компонент радиус-векторов между центром 0 и точками наблюдения [Семенов В.Г. и Сонина В.Э. 1992. С.21]:

где σMR(1) - СКО погрешности измерения ММ по (1) (среднее на компоненту) от погрешностей измерения радиус-векторов между центром 0 и точками наблюдения 1 и 2, Ам2;
М - модуль измеряемого ММ, Ам2;
ϕ - косинус угла между единичным вектором направления измеряемого MM M/M и единичным вектором направления n=R01/R1=R02/R2;
σR - СКО погрешности измерения компоненты радиус-вектора, м.

где σMR(2) - СКО погрешности измерения ММ по (2) (среднее на компоненту) от погрешностей измерения радиус-векторов между центром 0 и точками 1...11 и 2...12, Ам2.
Применительно к ММ результирующие погрешности измерения принято оценивать в виде [А.Н.Зайдель. Погрешности измерений физических величин. 1985. С.66]:

где δМрез(1 или 2) верхняя граница (при доверительной вероятности более 0.95) результирующей относительной погрешности измерения ММ по (1) или (2) (средней на компоненту);
М - модуль измеряемого ММ, Ам2.
Итак, пусть при произвольно выбранных расстояниях R1 и R2 измеряют ММ катушки 13 по уравнению измерения (1) или (2). При этом из внешних обмеров катушки 13 определяют длину стороны квадратного витка 16 - 2а'. Выясним, как связаны постоянные витка по магнитной индукции (МИ) и по ММ. Для этого (см. фиг.1) разделим уравнение (1) на величину ампервитков катушки 13.

где CMM(1) - постоянная по MM, определенная через уравнение (1), м2;
ΔСМИ12=CМИ1-СМИ2;
CМИ1, СМИ2 - постоянные по МИ в точках 1 и 2 (см. фиг.1), Тл/А.
Аналогично (см. фиг.2) имеем для уравнения (2)

где CMM(2) - постоянная по ММ, определенная через уравнение (2), м2;
ΔCМИ12=СМИ1-СМИ2...ΔСМИ1112=СМИ11-СМИ12;
Сu11, Cu12 - постоянные по МИ в точках 11 и 12 (см. фиг.2), Тл/А.
Различные значения постоянных по ММ CMM(1) и CMM(2) объясняются тем, что уравнения (8) и (9) производят разные методические погрешности, аналогичные методическим погрешностям уравнений (1) и (2).
Если форма и размеры витка определены (в нашем случае форма определена - виток квадратный и задан размер стороны витка 15 - 2а'), то постоянные по МИ такого витка могут быть рассчитаны с помощью закона Био-Савара-Лапласа [Б.М.Яворский и А.А.Детлаф. Справочник по физике. 1968. С.427].

где dB - элемент индукции магнитного поля, Тл;
I - значение тока, А;
dI - элемент касательной к дуге витка, м;
r - радиус вектор от элемента дуги витка с током в точку, где определяется элемент индукции, м;
r -модуль радиус вектора, м.
Для прямолинейного отрезка (см. фиг.5) выражение (10) может быть проинтегрировано.


где В - индукция, которую создает прямолинейный отрезок в точке наблюдения, Тл;
СМИ -постоянная по МИ прямолинейного отрезка в точке наблюдения, Тл/А;
lн, lк - координаты начала и конца прямолинейного отрезка, м;
I0 - единичный вектор касательной к отрезку,
r0 - вектор перпендикуляра, опущенного из точки наблюдения на продолжение отрезка, м;
dI×r=I0dl×(lI0+r0)=I0×r0dl, м2;

 - длина перпендикуляра или модуль вектора перпендикуляра, м;
- длина перпендикуляра или модуль вектора перпендикуляра, м;
rн=(l2 н+r0 2)1/2, rk=(l2 k+r0 2)1/2 - длины радиус-векторов начала и конца, м.
Из (11) получим выражение для постоянной по МИ от прямолинейного отрезка (см. фиг.5)

Аналогично (12) рассчитывают постоянные по МИ для всех четырех сторон витка 15 и, суммируя их, определяют постоянную по МИ витка 15 относительно каждой точки наблюдения, вычисляют разности постоянных между точками измерительных и компенсационных датчиков (см. фиг.1). Подставляют вычисленные разности постоянных по МИ в правые части уравнений (8) или (9) и вычисляют соответствующие этим уравнениям постоянные по ММ витка 15 CMM(1) или CMM(2). Кроме того, если задан размер витка 15 - 2а', то тем самым задано точное значение модуля постоянной по ММ этого витка - (2а')2. После этого результат измерения ММ катушки 13 по уравнению измерения (1) или (2) корректируют на методическую погрешность (1) или (2) по формулам

или

Соотношения (13), (14) выражают основное содержание заявляемого способа.
Заявляемый способ проверен с помощью компьютерной программы МатЛаб с решением уравнений (1)-(2), (8)-(9) и (13)-(14) и вычисление составляющих и результирующих погрешностей измерения ММ заявляемым и известным способами при M=10 Ам2, σB=0.1 нТл, σR=5×10-3 м, а=1 м, a'=a×0.97. Размеры СКО σB и σR соответствуют общепринятой аппаратуре. Результаты расчета даны в таблицах 1 и 2.
Оценки относит. погрешностей измерения для уравнение (1).
Оценки относит. погрешностей измерения для уравнение (2).
Как видно из таблиц, с увеличением расстояния R1 методическая погрешность уменьшается, а инструментальная быстро нарастает, поэтому результирующая обращается в минимум при некотором (оптимальном) расстоянии. Этот минимум принимается за итоговую точностную оценку заявляемого (и известного) способа для того или другого уравнения измерения ((1) или (2)).
Обратим внимание на то, что заявляемый способ обеспечивает значительное (в 18-9 раз) снижение доминирующей методической составляющей погрешности известного способа, что при использовании обычной аппаратуры, т.е. в условиях расчетного примера выше, снижает результирующую погрешность в 3,8-1,9 раз.
Аналогично можно рассчитать оценки при использовании улучшенной аппаратуры. Например, снижение СКО σB и σR в три раза снижает итоговую оценку
известного способа от 0.091 при k=5.5 до 0.06 при k=6 для (1) и
от 0.013 при k=4.5 до 0.007 при k=5 для (2);
заявляемого способа от 0.024 при k=3.5 до 0.011 при k=4 для (1) и
от 0.006 при k=3.5 до 0.0029 при k=4 для (2).
Таким образом, оценки заявляемого способа не только лучше по точности, но и соответствуют меньшим оптимальным расстояниям. Т.е. заявляемый способ требует для своей реализации лабораторного помещения меньшего объема.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО МОМЕНТА КРУПНОГАБАРИТНОГО ТЕЛА УДЛИНЕННОЙ ФОРМЫ | 2005 |
|
RU2303792C1 |
| Способ измерения магнитного момента тела удлиненной формы | 2017 |
|
RU2677928C1 |
| Способ измерения магнитного момента тела удлиненной формы | 2020 |
|
RU2755026C1 |
| СПОСОБ ПОВЕРКИ МАГНИТОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 2012 |
|
RU2503026C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВНЕШНЕЙ ПОМЕХИ В ЦЕНТРЕ МЕРЫ МАГНИТНОЙ ИНДУКЦИИ | 2008 |
|
RU2394251C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ МАГНИТНОГО ДИПОЛЯ | 2010 |
|
RU2456642C2 |
| СПОСОБ РАЗДЕЛЬНОГО ИЗМЕРЕНИЯ ИНДУКТИВНОГО И ПОСТОЯННОГО МАГНИТНЫХ МОМЕНТОВ КРУПНОГАБАРИТНОГО ФЕРРОМАГНИТНОГО ТЕЛА УДЛИНЕННОЙ ФОРМЫ | 2005 |
|
RU2293345C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ ДИПОЛЬНОЙ МОДЕЛИ | 2010 |
|
RU2433420C1 |
| Трехкомпонентная мера магнитного момента | 2024 |
|
RU2824326C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ ДИПОЛЬНОЙ МОДЕЛИ | 2012 |
|
RU2521134C2 |
Изобретение относится к области измерения магнитного момента (ММ) меры ММ в виде квадратной катушки с током. Способ определения магнитного момента квадратной катушки с током заключается в измерении параметров индукции магнитного поля катушки и радиуса векторов между центром катушки и каждой точкой наблюдения индукции и вычисления ММ по измеренным величинам. Дополнительно измеряют длину стороны усредненного витка катушки, рассчитывают его площадь и постоянную по ММ в условиях определения момента. Результат определения ММ корректируют умножением на отношение площади к модулю постоянной. Технический результат: снижение методической составляющей результирующей погрешности при меньших удалениях точек наблюдения от центра. 2 табл., 5 ил.
Способ определения магнитного момента квадратной катушки с током путем измерения параметров индукции магнитного поля катушки и радиус-векторов между центром катушки и каждой точкой наблюдения индукции и вычисления момента по измеренным величинам, отличающийся тем, что дополнительно измеряют длину стороны усредненного витка катушки, рассчитывают площадь витка и его постоянную по магнитному моменту в условиях определения момента, после чего результат определения корректируют умножением на отношение площади к модулю постоянной.
| СЕМЕНОВ В.Г., СОНИНА В.Э | |||
| Анализ методов измерения магнитных моментов | |||
| Метрология, 1992, №8, с.7, 10 | |||
| Способ раздельного измерения остаточной и индуктивной намагниченности образцов горных пород с помощью двух одинаковых магнитомодуляционных датчиков | 1958 |
|
SU123637A1 |
| Устройство для измерения магнитнойВОСпРииМчиВОСТи ОбРАзцОВ СлАбОМАгНиТНыХВЕщЕСТВ | 1979 |
|
SU842659A1 |
| US 4037149 A, 19.07.1977 | |||
| US 5311125 A1, 10.05.1994. | |||

