Изобретение относится к робототехнике и предназначено для определения плоских декартовых координат и углового положения тележки мобильного робота при его перемещении по горизонтальной поверхности в заданном помещении.
Известна система [1], включающая сеть статических многоцелевых датчиков, используемых, в том числе для идентификации местоположения мобильных роботов. Используемая при этом радиосвязь позволяет найти координаты мобильного робота очень приближенно.
Наиболее близким по совокупности признаков является мобильный робот [2], тележка которого, предназначенная для перемещения по горизонтальной поверхности с заданной плоской системой координат, оснащена устройством определения местоположения, соединенным с управляющей частью и содержащим обзорную видеокамеру для создания обзорного изображения потолка помещения и распознавания базового знака на потолке.
Данная система распознавания хорошо работает в тех помещениях, где потолок расположен на небольшой высоте и совершенно не применима в средах, где потолок отсутствует либо на него нельзя наносить технологические изображения.
Задачей изобретения является автоматизированное уточненное определение плоских декартовых координат и углового положения тележки мобильного робота при его перемещении по горизонтальной поверхности в заданном помещении.
Поставленная задача достигается тем, что предложен способ визуального контроля ориентации тележки мобильного робота на горизонтальной поверхности с заданной плоской системой координат при помощи видеокамеры, у которого согласно изобретению на тележке мобильного робота на одинаковой высоте неподвижно установлены два различных источника излучения, на горизонтальной поверхности задана система реперных точек, видеокамера установлена неподвижно относительно горизонтальной поверхности, для каждой реперной точки на матрице изображения определено усредненное точечное изображение источника излучения, по изображениям текущих положений источников излучения вначале определяют ближайшие к ним изображения реперных точек, не лежащие на одной прямой, по которым затем производят интерполирование положений источников излучения в плоской системе координат, а также определяют угловое положение тележки мобильного робота.
На фиг.1 схематически дан общий вид помещения с заданной плоской системой координат Oxy и системой реперных точек  . Источники излучения 1 и 2 установлены на тележке мобильного робота 3, на которой на высоте Н на расстоянии ρ друг от друга. Видеокамера 4 неподвижно установлена в заданной точке помещения. Схематически показана матрица изображения 5, получаемого с видеокамеры 4. На матрице изображения 5 показано изображение
. Источники излучения 1 и 2 установлены на тележке мобильного робота 3, на которой на высоте Н на расстоянии ρ друг от друга. Видеокамера 4 неподвижно установлена в заданной точке помещения. Схематически показана матрица изображения 5, получаемого с видеокамеры 4. На матрице изображения 5 показано изображение  источника 1 при его позиционировании в реперной точке
источника 1 при его позиционировании в реперной точке 
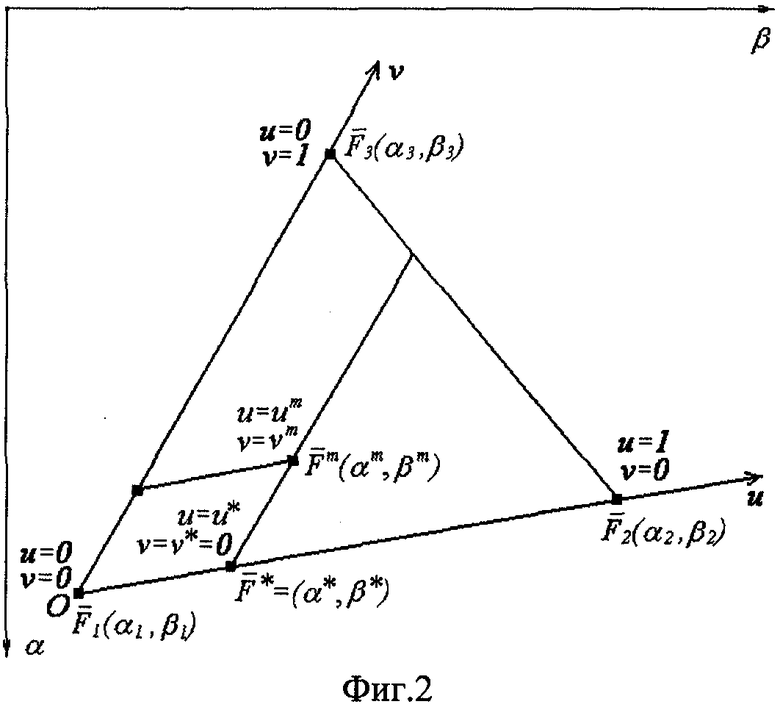
На фиг.2 показан треугольник, образуемый точками-изображениями 

 ближайшими к изображению
ближайшими к изображению  а также локальная система координат (u, ν) и значения параметров (u1, ν1), соответствующие изображению
а также локальная система координат (u, ν) и значения параметров (u1, ν1), соответствующие изображению 
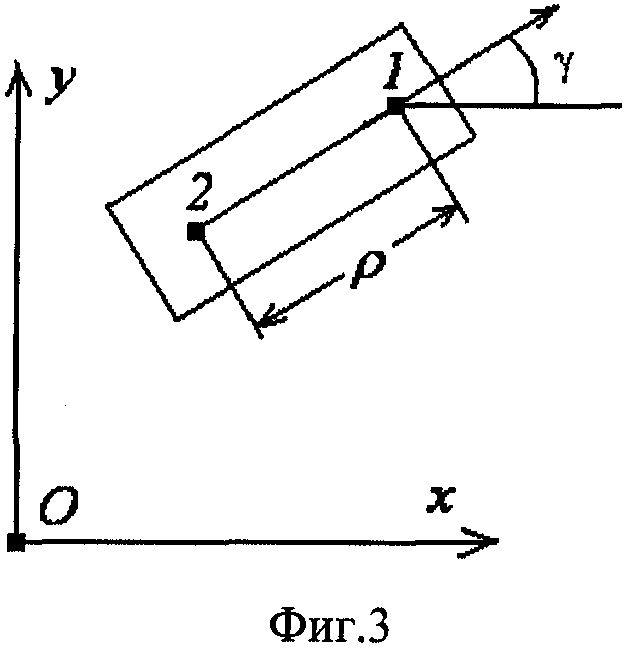
На фиг.3 дан вид сверху тележки робота.
При перемещении тележки мобильного робота 3 по горизонтальной плоскости требуется определить координаты (x, y), а также угол поворота тележки γ при ее перемещении в пределах заданного помещения по получаемым изображениям источников излучения 1 и 2.
Пространственное распознавание местоположения источников излучения 1 и 2 осложняется тем, что перспективное изображение, получаемое реальной камерой, существенно искажается ее оптической системой, а также за счет погрешностей юстирования, установки и т.д. Неподвижно установленная видеокамера задает некоторое фиксированное отображение множества точек с пространственными декартовыми координатами (х, y, Н) на пиксели матрицы изображения, у которых усредненные координаты изображения обозначим через 
Рассмотрим решение для плоской поверхности, позволяющее значительно повысить точность распознавания положения тележки робота за счет использования сети реперных точек 
На первом этапе производится перемещение МР таким образом, чтобы плоские координаты одного из источников (1 или 2) совпадали с реперными точкам  и после распознавания положения данного источника излучения на прямоугольной матрице определяются образы пространственных точек (хi, yi, Н). Обозначим их через
и после распознавания положения данного источника излучения на прямоугольной матрице определяются образы пространственных точек (хi, yi, Н). Обозначим их через  Массивы координат реперных точек
Массивы координат реперных точек  и отображений через
и отображений через  на матрицу изображений сохраняются в памяти компьютера.
на матрицу изображений сохраняются в памяти компьютера.
Полученные результаты тарирования видеоизображений источника, получаемых с помощью постоянно установленной камеры, используются для уточненного распознавания положений робота следующим образом. Допустим, усредненное положение текущего изображения датчика (1 или 2) на матрице имеет некоторые координаты  Необходимо определить по данным параметрам изображения и тарировочной информации
Необходимо определить по данным параметрам изображения и тарировочной информации 
 плоские декартовы координаты
плоские декартовы координаты  соответствующего датчика робота.
соответствующего датчика робота.
Если найденные координаты изображения  совпали с отображением
совпали с отображением  какой-либо реперной точки, то для плоских декартовых координат искомой точки принимаем:
какой-либо реперной точки, то для плоских декартовых координат искомой точки принимаем:  .
.
Если же найденные координаты изображения  существенно отличаются от имеющихся изображений реперных точек, то для определения искомых координат
существенно отличаются от имеющихся изображений реперных точек, то для определения искомых координат  применяем интерполирование по полученным ранее массивам
применяем интерполирование по полученным ранее массивам 
 Для этого вначале по заданным параметрам изображения датчика излучения определяем три ближайших к ним изображения
Для этого вначале по заданным параметрам изображения датчика излучения определяем три ближайших к ним изображения 

 реперных точек из массива
реперных точек из массива  не лежащие на одной прямой.
не лежащие на одной прямой.
Примем линейное интерполирование локальных координат (u, ν), связанных с реперными точками 

 Связь параметров текущего изображения датчика излучения
Связь параметров текущего изображения датчика излучения  с параметрами ближайших изображений
с параметрами ближайших изображений  будет следующей:
будет следующей:

где um, νm - локальные координаты точки  .
.
Необходимо определить координаты (um, νm) полученного изображения датчика по заданным параметрам датчика излучения . По правилу Крамера решение представим в виде


где 
Искомые декартовые координаты (хm, уm) на плоской поверхности, соответствующие текущему изображению (um, νm) получаем при данном способе интерполирования, подставляя найденные значения параметров um и νm в выражение для 

где  - реперные точки плоскости, соответствующие изображениям
- реперные точки плоскости, соответствующие изображениям 
По формулам (3) необходимо рассчитать декартовы координаты (хm1, ym1), (хm2, ym2) обоих источников. Для определения угла поворота тележки γ относительно оси х (фиг.3) используем величины тригонометрических функций γ:

где ρ′ - расстояние между расчетными положениями (хm1, ym1), (хm2, ym2) источников 1 и 2, которое в основном из-за погрешностей измерений будет несколько отличаться от точного значения ρ′.
Предложенный способ определения ориентации тележки мобильного робота позволяет получить хорошую точность за счет выбора системы реперных точек на плоскости. Распознавание изображений источников излучения, формирование необходимых массивов тарировочной информации  в памяти компьютера и последующее вычисление плоских координат тележки легко программируется на ЭВМ.
в памяти компьютера и последующее вычисление плоских координат тележки легко программируется на ЭВМ.
Для получения визульной информации о положении робота могут быть использованы обычные камеры видеонаблюдения.
Пример.
На тележке мобильного робота источники излучения 1 и 2 установлены на одинаковой высоте на расстоянии 0,5 м друг от друга. В помещении неподвижно установлена видеокамера из четырехканального комплекта RC500A. Для приема визуальной информации использован ТВ - тюнер PCI FlyTV Prime. При проведении эксперимента использованы 256-цветные черно-белые изображения. Для массива координат реперных точек  получены их усредненные изображения
получены их усредненные изображения 
Для источника 1 получено изображение с усредненными координатами  для источника 2 - изображение с усредненными координатами
для источника 2 - изображение с усредненными координатами  .
.
Ближайшими к изображениям  и
и  являются не лежащие на одной прямой изображения
являются не лежащие на одной прямой изображения 

 реперных точек
реперных точек 
Необходимо определить декартовы координаты (хm1, ym1), (хm2, ym2) источников излучения 1 и 2, а также угол γ, образуемый осью тележки с декартовой осью х.
Решение. Для расчетов по формулам (2) находим значения определителей:





Значения параметров для усредненных изображений источников излучения 1 и 2:

Декартовы координаты (хm, ym) источников излучения, соответствующие параметрам (um, νm), получаем при данном способе интерполирования, подставляя найденные значения в выражение для 




Определим расчетную величину ρ′:



Угол, образуемый осью тележки с декартовой осью х:

Опытные испытания показывают, что ошибки при определении местоположения робота не превышают 10-15 см, угловые ошибки - до 5-10°. Таким образом предлагаемый способ обеспечивает довольно высокую точность при автоматизированном определении плоских декартовых координат и углового положения тележки мобильного робота при его перемещении по горизонтальной поверхности в заданном помещении.
Изобретение относится к робототехнике и предназначено для определения плоских декартовых координат и углового положения тележки мобильного робота при его перемещении по горизонтальной поверхности в заданном помещении. Способ визуального контроля ориентации тележки мобильного робота на горизонтальной поверхности с заданной плоской системой координат при помощи видеокамеры, при котором на тележке мобильного робота на одинаковой высоте неподвижно установлены два различных источника излучения, на горизонтальной поверхности задана система реперных точек, видеокамера установлена неподвижно относительно горизонтальной поверхности, для каждой реперной точки на матрице изображения определено усредненное точечное изображение источника излучения, по изображениям текущих положений источников излучения вначале определяют ближайшие к ним изображения реперных точек, не лежащие на одной прямой, по которым затем производят интерполирование положений источников излучения в плоской системе координат, а также определяют угловое положение тележки мобильного робота. Изобретение обеспечивает автоматизированное уточненное определение плоских декартовых координат и углового положения тележки мобильного робота при его перемещении по горизонтальной поверхности в заданном помещении. 3 ил.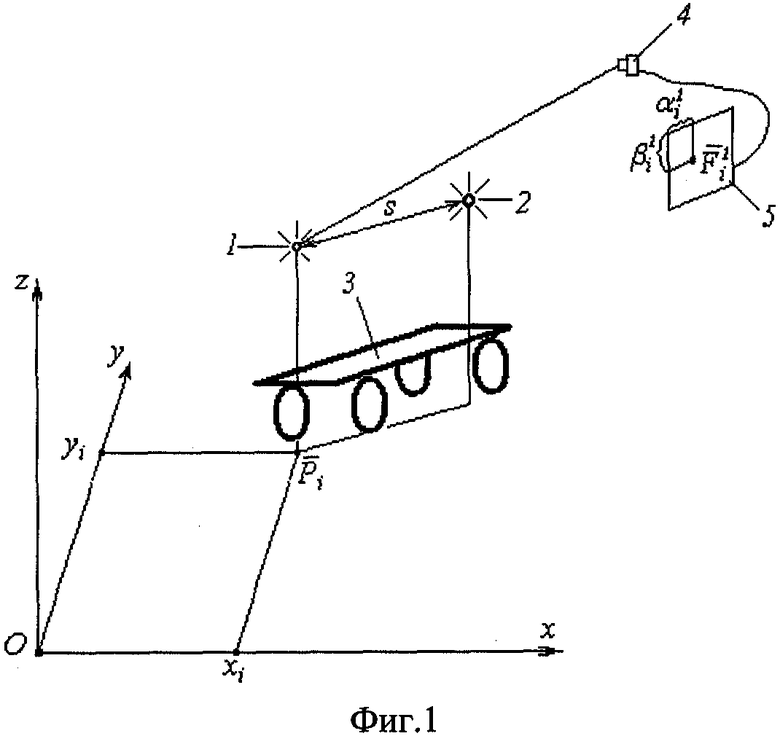
Способ визуального контроля ориентации тележки мобильного робота на горизонтальной поверхности с заданной плоской системой координат при помощи видеокамеры, отличающийся тем, что на тележке мобильного робота на одинаковой высоте неподвижно установлены два различных источника излучения, на горизонтальной поверхности задана система реперных точек, видеокамера установлена неподвижно относительно горизонтальной поверхности, для каждой реперной точки на матрице изображения определено усредненное точечное изображение источника излучения, по изображениям текущих положений источников излучения вначале определяют ближайшие к ним изображения реперных точек, не лежащие на одной прямой, по которым затем производят интерполирование положений источников излучения в плоской системе координат, а также определяют угловое положение тележки мобильного робота.
| МОБИЛЬНЫЙ РОБОТ И СПОСОБ КОРРЕКТИРОВКИ ЕГО КУРСА | 2001 |
|
RU2210492C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092788C1 |
| УСТРОЙСТВО к ТОКАРНЫМ СТАНКАМ ДЛЯ ОСУЩЕСТВЛЕНИЯ ОБРАБОТКИ ДАВЛЕНИЕМ | 0 |
|
SU221643A1 |
| JP 6190756 А, 12.07.1994 | |||
| JP 9076185 А, 25.03.1975 | |||
| US 5751917, 12.05.1998. | |||

