Изобретение относится к области навигации, а именно к области бесплатформенных инерциальных навигационных систем (БИНС), и может быть использовано при модернизации бортового оборудования (БО) беспилотных летательных аппаратов (БПЛА), имеющих в своем составе свободные гироскопы (ГС).
Системы управления современного БПЛА представляют собой инерциальные системы управления на базе БИНС. Разработка новых систем БПЛА на основе уже изготовленных и находящихся в производстве изделий (модернизация) заменой БО таких изделий путем включения БИНС в состав БО позволяет сократить сроки разработки и стоимость БПЛА.
Обычная современная БИНС, взятая в качестве прототипа, как правило, содержит три датчика угловой скорости (ДУС) и три акселерометра, выходы которых соединены с вычислительным устройством (ВУ) [1].
Использование БИНС полного состава при модернизации изделия, имеющего в своем БО ГС, неоправданно удорожает систему управления изделием.
Задачей, на решение которой направлено изобретение, является снижение стоимости БИНС, используемой при модернизации изделий, имеющих в составе своего БО ГС.
Поставленная задача решается за счет того, что в БИНС, содержащую три акселерометра и два ДУС, выходы которых соединены с вычислительным устройством, согласно изобретению дополнительно введены два имитатора ДУС, выходы и первые входы которых соединены с ВУ, второй вход первого имитатора соединен с внешним устройством коррекции (УК), а второй вход второго имитатора соединен с внешним ГС.
Существенным отличием заявленного решения от известного является то, что из состава БИНС исключен один из ДУС, а вместо него введены два имитатора, которые, используя имеющиеся сигналы и данные, полностью обеспечивают работу БИНС, что в конечном счете снижает стоимость модернизации изделия.
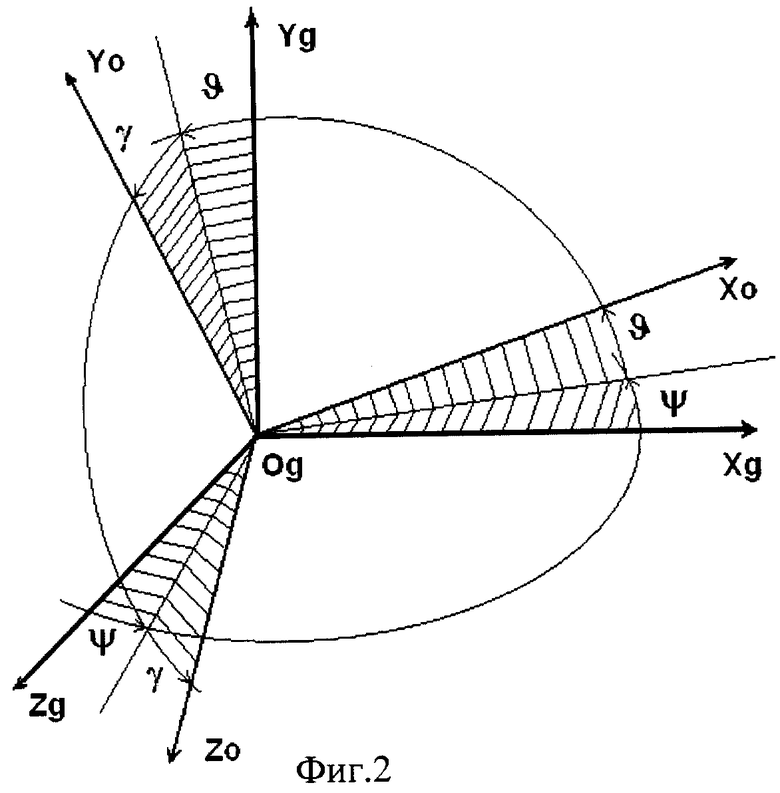
На чертежах поясняется конструкция предложенной БИНС и принцип ее действия: на фиг.1 изображена блок-схема БИНС; на фиг.2 приведены земная Oxgуgzg и связанная с объектом Ox0у0z0 системы координат и углы Эйлера ψ, υ, γ последовательности поворотов от земной к связанной системе координат; на фиг.3 приведены связанная с объектом Ox0у0z0 и связанная с выставляемой БИНС ОхБуБzБ системы координат.
Предложенная БИНС 1 включает в себя три акселерометра 2.1, 2.2 и 2.3 и два ДУС 3.1 и 3.2. Выходы акселерометров 2.1, 2.2 и 2.3 и ДУС 3.1 и 3.2 соединены с вычислительным устройством 4. Кроме этого БИНС1 включает в себя первый имитатор 5.1 ДУС и второй имитатор 5.2 ДУС. Выходы и первые входы обоих имитаторов 5.1 и 5.2 соединены с вычислительным устройством 4, второй вход первого имитатора 5.1 соединен с внешним устройством 6 коррекции, а второй вход второго имитатора 5.2 соединен с внешним ГС 7.
Следует пояснить, что при включении БИНС в состав БО требуется начальная выставка (НВ) БИНС при подготовке изделия к пуску. НВ БИНС производится с помощью внешнего УК БИНС, описанного, например, в [2], соединенного как с выставляемой БИНС, так и с базовым источником навигационной информации (например, ИНС) носителя.
Модернизируемый БПЛА обычно содержит в составе контуров стабилизации инерциальные датчики, причем для стабилизации угла крена используют ГС с аналоговым выходом по углу крена изделия. Вследствие ограничений по углам прокачки ГС разарретируют (переводят в режим измерения) в момент пуска изделия. На участке автономной работы БИНС выходной сигнал данного ГС может быть использован вместо ДУС по продольной оси изделия.
Таким образом, путем реализации данного изобретения можно обеспечить сокращение состава БИНС модернизируемых изделий, содержащих ГС, обеспечивая при этом НВ и автономную работу БИНС в усеченном составе. При этом на участке автономной работы БИНС может быть использован выход ГС, измеряющего угол крена изделия.
Все компоненты, входящие в состав заявленной БИНС, известны, в частности имитаторы ДУС можно выполнить программным путем или на дискретных компонентах, что не составляет предмета отдельного изобретения.
Заявленная БИНС работает следующим образом.
В процессе НВ БИНС 1 в УК 6 поступают из ИНС носителя углы Эйлера ориентации носителя, которые УК 6 передает на вход первого имитатора 5.1 ДУС. Используя эти углы Эйлера имитатор 5.1 ДУС определяет компоненты вектора угловой скорости вращения на оси связанной с носителем системы координат Ox0у0z0 (фиг.2). На второй вход имитатора 5.1 ДУС из ВУ 4 поступает матрица ориентации выставляемой БИНС 1. Имитатор 5.1 ДУС, используя углы Эйлера, полученные из УК 6 и матрицу ориентации из ВУ 4 определяет матрицу рассогласования между связанными системами координат носителя Ox0у0z0 и выставляемой БИНС ОхБуБzБ (фиг.3). Используя компоненты вектора угловой скорости и элементы матрицы рассогласования, имитатор 5.1 ДУС определяет проекцию угловой скорости на продольную ось БИНС и передает ее на вход ВУ 4.
В процессе автономной работы БИНС на второй вход второго имитатора 5.2 ДУС поступает угол ориентации, измеренный ГС 7, на первый вход имитатора 5.2 ДУС из ВУ 4 поступает матрица ориентации БИНС 1 и угловые скорости, измеренные ДУС 3.1 и 3.2 БИНС 1. Используя угол ориентации ГС 7, матрицу ориентации и угловые скорости БИНС 1, имитатор 5.2 ДУС определяет проекцию угловой скорости вращения БИНС 1 на ее продольную ось и передает эту проекцию на вход ВУ 4.
Работа БИНС на участке НВ.
На участке начальной выставки в процессе совместного полета в [3, стр.157] приведены кинематические соотношения между проекциями угловой скорости вращения на оси связанной системы координат и углами Эйлера (фиг.2).

На малых интервалах времени Δt

Подставляя (2) в (1), получим проекции угловой скорости на оси связанной с носителем системы координат.
Используя углы Эйлера ориентации носителя ψ, υ, γ, в соответствии с [3, стр.144] найдем матрицу перехода от нормальной земной (g) к связанной с носителем системе координат

БИНС 1 передает по первому входу имитатора 5.1 ДУС матрицу ориентации БИНС 1 от связанной с БИНС 1 к земной системе координат AgБ.
Тогда матрица рассогласования между связанными системами координат А0Б (фиг.3) определяется по формуле

проекция угловой скорости на ось OxБ - по формуле

Параметр ωХБ из имитатора 5.1 ДУС поступает на вход ВУ 4.
Работа БИНС на автономном участке.
До начала автономной работы БИНС 1 производится разарретирование ГС 7 (перевод ГС 7 в режим измерения). В момент начала работы ГС 7 в режиме измерения угла имитатор 5.2 ДУС сохраняет текущую ориентацию БИНС 1 в виде, например, матрицы ориентации А0Б и одновременно - измеренный ГС 7 угол крена γ0.
Расчет угловой скорости на выходе имитатора 5.2 ДУС производится с учетом установки ГС 7. Ниже приведен расчет угловой скорости для следующей установки ГС 7 на изделии:
- кинетический момент ГС 7 в момент раззаретирования совпадает с направлением оси ОZБ;
- внутренняя рамка ГС 7 в момент разарретирования совпадает с осью ОУБ;
- наружная/измерительная рамка ГС 7 в момент разарретирования совпадает с осью ОХБ.
Последовательность поворотов от неподвижной системы координат ГС 7 к системе координат, связанной с корпусом изделия (система координат ОхБуБzБ (фиг.3), υГ, ψГ, γГ совпадает с последовательностью поворотов [3, стр.72]. В соответствии с [3, стр.161] проекция угловой скорости на ось ОХБ

Для малых интервалов времени Δt

В соответствии с [3, стр.72]

Матрица А определяется имитатором 5.2 ДУС с использованием текущей и запомненной на момент разарретирования ГС 7 матрицы БИНС 1.

 - матрица ориентации связанных осей БИНС 1 относительно ориентации этих осей на момент разарретирования ГС 7.
- матрица ориентации связанных осей БИНС 1 относительно ориентации этих осей на момент разарретирования ГС 7.
Таким образом, схема работы имитатора 5.2 ДУС следующая:
1) в момент разарретирования ГС 7 имитатор 5.1 сохраняет:
 - угол измерений ГС 7,
- угол измерений ГС 7,
 - матрицу ориентации БИНС 1.
- матрицу ориентации БИНС 1.
2) в соответствии с частотой обновления угловой скорости имитатор 5.2 ДУС:
а) принимает по своим входам:
γГ - угол измерений ГС 7,
AБg - матрицу ориентации БИНС 1,
ωУБ, ωZБ - угловые скорости, измеренные ДУС 3.1 и 3.2 БИНС 1 по осям ОУБ, OzБ.
б) определяет угол ΨГ

ψГ=arcsin(a13)
в) определяет текущую угловую скорость



г) передает полученную угловую скорость ωХБ на вход ВУ 4 БИНС 1.
Источники информации:
1. О.А. Степанов "Особенности построения и перспективы развития инерциально-спутниковых систем", стр.26, 27. В сборнике статей и докладов "Интегрированные инерциально-спутниковые системы навигации". Санкт-Петербург, 2001 г.
2. Патент РФ №2193754, МПК G01C 21/10, 2002 г.
3. О.А. Горбатенко, Э.М. Макашов и др. "Механика полета", 1969 г., М., "Машиностроение", стр.72, 144, 157, 161.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО АППАРАТА, ПОДВЕШЕННОГО К САМОЛЕТУ-НОСИТЕЛЮ | 2014 |
|
RU2553776C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339002C1 |
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ В ПОЛЕТЕ | 2012 |
|
RU2486472C1 |
| ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ СИСТЕМА НАВИГАЦИИ СРЕДНЕЙ ТОЧНОСТИ ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2539140C1 |
| АВТОНОМНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ОРИЕНТАЦИИ ПРИБОРНОЙ СИСТЕМЫ КООРДИНАТ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА УПРАВЛЯЕМОГО ОБЪЕКТА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ | 2008 |
|
RU2386107C1 |
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334947C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАВЕДЕНИЯ ДОВОДОЧНЫХ СТУПЕНЕЙ РАЗЛИЧНОГО НАЗНАЧЕНИЯ | 2010 |
|
RU2440557C9 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| СПОСОБ ОЦЕНКИ ОШИБОК И КОНТРОЛЯ ДАТЧИКОВ ПЕРВИЧНОЙ ИНФОРМАЦИИ В СОСТАВЕ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ В НАЗЕМНЫХ УСЛОВИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2537513C2 |

Изобретение относится к области навигации, а именно к области бесплатформенных инерциальных навигационных систем (БИНС), и может быть использовано при модернизации бортового оборудования (БО) беспилотных летательных аппаратов, имеющих в своем составе свободные гироскопы (ГС). БИНС содержит три акселерометра и два датчика угловой скорости, соединенные с вычислительным устройством. В БИНС введены два имитатора, один из которых работает на участке начальной выставки БИНС, а другой на автономном участке. Имитаторы БИНС, кроме того, подключены к внешнему устройству коррекции и к внешнему свободному гироскопу. Технический результат - сокращение состава БИНС, используемой при модернизации изделий, имеющих в составе своего БО ГС. 3 ил.
Бесплатформенная инерциальная навигационная система, содержащая три акселерометра и два датчика угловой скорости, выходы которых соединены с вычислительным устройством, отличающаяся тем, что в нее дополнительно введены два имитатора датчика угловой скорости, выходы и первые входы которых соединены с вычислительным устройством, второй вход первого имитатора соединен с внешним устройством коррекции, а второй вход второго имитатора соединен с внешним свободным гироскопом.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241959C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРИЕНТАЦИИ И НАВИГАЦИИ И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 2003 |
|
RU2256881C2 |
| RU 2059205 С1, 27.04.1996 | |||
| US 4914598 А, 03.04.1990 | |||
| US 4901565 А, 20.02.1990. | |||

