Описываемое предлагаемое изобретение относится к автоматическому управлению, в частности к способам экстремального регулирования, и может быть использовано для поддержания рабочей точки технологических объектов управления различной инерционности в точке экстремума или на заданном расстоянии от нее.
Уже известен способ экстремального регулирования с модулирующим воздействием при котором управляющее воздействие ϕ наряду с постоянной составляющей содержит незначительные по величине колебания, которые приводят к возникновению подобных колебаний на выходе объекта. Разность фаз колебаний на входе и выходе объекта позволяет вырабатывать соответствующее по величине и знаку управляющее воздействие ϕ. К недостатку этого способа следует относить наличие постоянных колебаний на объекте [1].
Также известен способ экстремального регулирования с дифференциальной системой, использующий принцип «деформации» экстремальной характеристики технологического объекта. Управляющее воздействие ϕ в данном способе рассчитывается таким образом, чтобы разность значений регулируемой величины μ, «деформированной» путем умножения на различные коэффициенты усиления β1 и β2, на один из которых дополнительно подано смещение С, была равна нулю. К недостаткам этого способа следует относить поддержание рабочей точки объекта только на удалении от экстремума и отсутствие возможности выбора расположения рабочей точки объекта слева (или справа) от экстремума [1].
В качестве прототипа выбран способ экстремального регулирования с автоколебательной системой. Управляющее воздействие ϕ в данном способе является постоянным по величине, но различным по знаку, который вычисляется путем расчета значения производной dμ/dϕ. К недостаткам этого способа относятся постоянное по величине управляющее воздействие, наличие постоянных колебаний около точки экстремума, недостаточное качество регулирования на инерционных технологических объектах и невозможность поддержания рабочей точки объекта на заданном удалении от экстремума [1].
Целью изобретения является повышение точности ведения технологических процессов с объектами экстремального типа различной инерционности при поддержании их рабочей точки в области экстремума или на заданном удалении от нее.
Поставленная цель достигается благодаря тому, что в способе регулирования с автоколебательной системой, осуществляющем расчет знака управляющего воздействия путем вычисления производной dμ/dϕ предусмотрены следующие отличия:
1) величина управляющего воздействия ϕ не является постоянной. Ее зависимость от величины производной dμ/dϕ задается в виде поверхности управляющих воздействий нечеткого регулятора (фази-регулятора) [2]. Вид поверхности выбирается исходя из стратегии управления [3], определяющей скорость поиска экстремума, точность его поддержания и величину смещения рабочей точки объекта управления;
2) инерционность объекта учитывается путем автоматической задержки очередного управляющего воздействия до момента вхождения производной регулируемой величины dμ/dt в задаваемую трубку допуска.
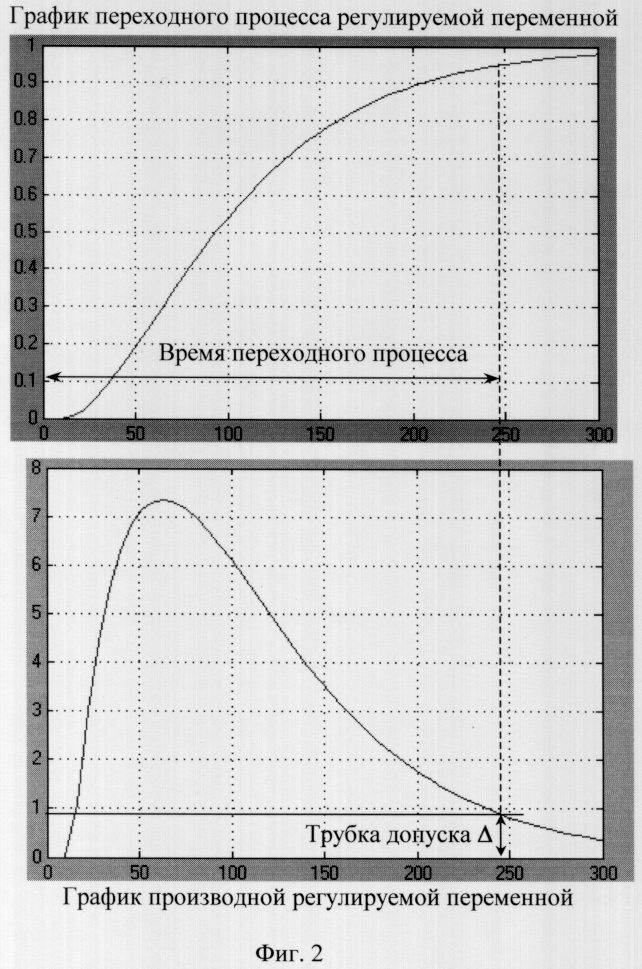
Сущность предложенного способа заключается в следующем (фиг.1). По регулируемой величине на выходе объекта μ и управляющему воздействию ϕ в дифференциаторах 6 и 7 вычисляются соответствующие производные по времени dϕ/dt и dμ/dt, по которым в блоке деления 5 рассчитывается производная dμ/dϕ, являющаяся входом фази-регулятора. На основании заложенной в регуляторе стратегии управления (см. ниже) вычисляется степень смещения управляющего воздействия а, которая суммируясь в блоке 1 с текущим управляющим воздействием ϕ дает новое значение ϕi+1. Текущее управляющее воздействие ϕ поступает на объект из запоминающего устройства (блок 3) и не меняется до тех пор, пока не произойдет замыкания логического ключа 2, в результате чего новое значение ϕi+1 запишется в запоминающее устройство и поступит на объект регулирования. Срабатывание логического ключа происходит в тот момент, когда блок 4 прямоугольной петли гистерезиса определит, что величина производной регулируемой величины dμ/dt вошла в трубку допуска, определяемую зоной Δ (фиг.2). Запись нового значения управляющего воздействия в запоминающее устройство производится один раз за цикл регулирования, после чего процесс повторяется.
В предлагаемом способе используется фази-регулятор, работа которого основана на известном аппарате нечеткой логики:
1. Для регулятора использован алгоритм Мамдани.
2. Входная величина представлена производной dμ/dϕ на нормированной от -1 до +1 оси лингвистической переменной «производная» в виде трех равномерно расположенных функций принадлежности и заданных в виде кривых Гаусса. Им соответствуют термы: отрицательная, близкая к нулю, положительная.
3. Степень смещения управляющего воздействия а представлена на нормированной от -1 до +1 оси лингвистической переменной «смещение» также в виде трех равномерно расположенных функций принадлежности и заданных в виде кривых Гаусса. Им соответствуют термы: отрицательное, нулевое, положительное.
4. Правила нечеткого вывода заданы следующим образом:
- Если «производная» отрицательная, то «смещение» положительное;
- Если «производная» близкая к нулю, то «смещение» нулевое;
- Если «производная» положительная, то «смещение» отрицательное.
5. При дефазификации использована максминная композиция и метод центра тяжести.
Настроечными параметрами предлагаемого нечеткого экстремального регулятора являются:
1. Зона Δ - задается в виде значения производной dμ/dt, при котором переходный процесс в системе считается законченным. Этот параметр учитывает инерционность объекта регулирования.
2. Параметр λ - определяет «ширину» функции принадлежности соответствующей терму нулевое вдоль оси выходной лингвистической переменной «смещение». Так как функция принадлежности задана кривой Гаусса, то он соответствует ее параметру «дисперсия». Величина параметра λ задает форму поверхности управляющих воздействий фази-регулятора и определяет стратегию управления системы экстремального регулирования.
3. Параметр δ - задается в виде величины смещения управляющего воздействия ϕ, которое приведет к требуемому смещению рабочей точки объекта. Если δ=0, то рабочая точка будет совпадать с экстремумом. Параметр δ определяет смещение функции принадлежности соответствующей терму нулевое вдоль оси выходной лингвистической переменной «смещение». Так как функция принадлежности задана кривой Гаусса, то он соответствует ее параметру «математическое ожидание».
Предложенный способ экстремального регулирования с поддержанием рабочей точки инерционного объекта на заданном расстоянии от экстремума может быть реализован: в виде устройства, состоящего из электронных компонентов; в виде устройства, использующего элементы пневмоавтоматики, а также в виде логической последовательности операций, описываемых на технологическом языке управляющего процессом промышленного контроллера.
Ожидаемый экономический эффект может быть рассчитан только после проведения испытаний на реальном технологическом объекте.
По предложенному техническому решению разработан алгоритм, моделирующий систему экстремального регулирования, впоследствии реализованный в виде программы на языке Pascal. Работа этой системы экстремального регулирования исследована также в пакете Simulink среды MATLAB. Для обеспечения промышленного использования возможно применение современных технических средств автоматизации технологических процессов, реализованных на базе промышленных контроллеров или дискретных элементах электро- или пневмоавтоматики.
Источники информации
1. Васильев В.И. Дифференциальные системы экстремального регулирования / В.И.Васильев, - Киев: Издательство академии наук Украинской ССР, 1963. - 72 с.
2. Лукас В.А. Основы фази-управления: учеб. пособие / В.А.Лукас, - Екатеринбург: Информационно-издательский центр, 2000. - 62 с.
3. Сидельников С.И., Родин С.Н. О методе настройки нечеткого экстремального регулятора: Труды НИ РХТУ им. Д.И.Менделеева. Серия: Кибернетика, Автоматизация, Математика, Информатизация - Новомосковск: РХТУ им. Д.И.Менделеева, Новомосковский институт, 2004. - 251 с.
Изобретение относится к автоматическому управлению, в частности к способам экстремального регулирования. Техническим результатом является повышение точности ведения технологических процессов на объектах экстремального типа различной инерционности при поддержании их рабочей точки в области экстремума или на заданном удалении от нее. Это достигается за счет того, что стратегия управления, выражающая скорость поиска экстремума, точность его поддержания и величину смещения рабочей точки объекта управления, задается в виде поверхности управляющих воздействий нечеткого регулятора (фази-регулятора). Инерционность объекта учитывается путем автоматической задержки очередного управляющего воздействия до момента вхождения производной регулируемой величины по времени в задаваемую трубку допуска. 2 ил.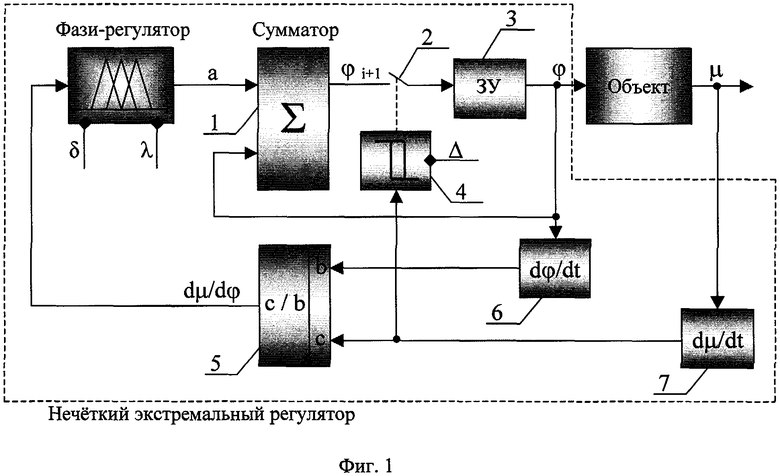
Способ экстремального регулирования с поддержанием рабочей точки инерционного объекта на заданном расстоянии от экстремума, заключающийся в том, что по регулируемой величине μ на выходе объекта и управляющему воздействию ϕ в дифференциаторах вычисляют соответствующие производные по времени dϕ/dt и dμ/dt, по которым в блоке деления рассчитывают производную dμ/dϕ, являющуюся входом нечеткого регулятора (фази-регулятора), в котором вычисляют степень смещения управляющего воздействия, которая, суммируясь с текущим управляющим воздействием ϕ, дает новое значение ϕi+1, сохраненное в запоминающем устройстве текущее управляющее воздействие ϕ подают на объект регулирования и не меняют до тех пор, пока не произойдет замыкание логического ключа, в результате чего новое значение ϕi+1 записывают в запоминающее устройство и передают на объект регулирования, при этом срабатывание логического ключа происходит в тот момент, когда величина производной регулируемой величины dμ/dt войдет в трубку допуска, определяемую зоной Δ, а запись нового значения управляющего воздействия в запоминающее устройство производят один раз за цикл регулирования, после чего процесс повторяют.
| Система экстремального регулирования | 1980 |
|
SU888070A1 |
| Экстремальный регулятор для резонансного объекта | 1981 |
|
SU979306A1 |
| RU 94039690 A1, 10.09.1996 | |||
| ОБОЛОЧКА ДЛЯ ПИЩЕВЫХ ПРОДУКТОВ С ШЕРОХОВАТОЙ ИМЕЮЩЕЙ НАТУРАЛЬНЫЙ ВИД ПОВЕРХНОСТЬЮ, СПОСОБ ИЗГОТОВЛЕНИЯ ОБОЛОЧКИ И ЕЕ ПРИМЕНЕНИЕ | 2003 |
|
RU2310331C2 |

