Данное изобретение относится к электродвигателю, выполненному с возможностью его установки и позиционирования в опоре для электродвигателя в соответствии с ограничительной частью пункта 1 формулы настоящего изобретения.
Еще одна особенность настоящего изобретения относится к способу установки и позиционирования электродвигателя в опоре для электродвигателя согласно ограничительным частям независимых п.3 и 4.
В частности, настоящее изобретение относится к способу установки и позиционирования электродвигателя на автоматических линиях.
Известны электродвигатели, устанавливаемые в опоре для электродвигателя, и способы установки и позиционирования электродвигателя, согласно которым оператор или антропоморфный робот устанавливает и правильно позиционирует электродвигатель в сконструированной для этой цели опоре электродвигателя.
Если установку и позиционирование выполняет оператор, то он может легко проверить правильное позиционирование электродвигателя.
Напротив, если эти действия выполняют на автоматической линии, то нужно обеспечить множество проверочных пунктов, чтобы определять пространственное положение робота относительно электродвигателя и/или наоборот. Фактически, когда робот снимает электродвигатель с поддона или берет его из станции-хранилища электромоторов, он это делает «вслепую» в отношении текущего положения электродвигателя.
Чтобы антропоморфный робот смог распознавать положение электродвигателя в пространстве, необходимо обеспечить несколько датчиков положения, кодеров, фотоэлементов и т.п. При этом можно определить ряд поворотных/возвратно-поступательных операций, которые робот должен выполнять для установки и позиционирования электродвигателя в соответствующей опоре.
Но недостатки этого технического решения заключаются в том, что для него требуется значительное число датчиков в ущерб автоматизированной системе управления, которая из-за этого становится усложненной и неустойчивой.
Поэтому существует необходимость в разработке способа, который позволит сократить число используемых датчиков положения.
Решаемая настоящим изобретением техническая проблема заключается в обеспечении электродвигателя, устанавливаемого на опоре электродвигателя, имеющей конструкционные и функциональные характеристики, обеспечивающие возможность установки и позиционирования сообразно упоминаемым выше требованиям, и в обеспечении способа установки электродвигателя.
Эта проблема решается путем обеспечения электродвигателя, выполненного с возможностью установки в опоре электродвигателя согласно п. 1 формулы изобретения и с помощью способа установки и позиционирования электродвигателя в опоре электродвигателя согласно п.3 и 4.
Прочие преимущества и характеристики настоящего изобретения поясняются в приводимом ниже подробном описании со ссылкой на прилагаемые чертежи, представленные только в качестве неограничивающего примера, на которых:
- Фиг. 1 показывает изображение в перспективе электродвигателя, выполненного с возможностью установки в опоре электродвигателя согласно настоящему изобретению.
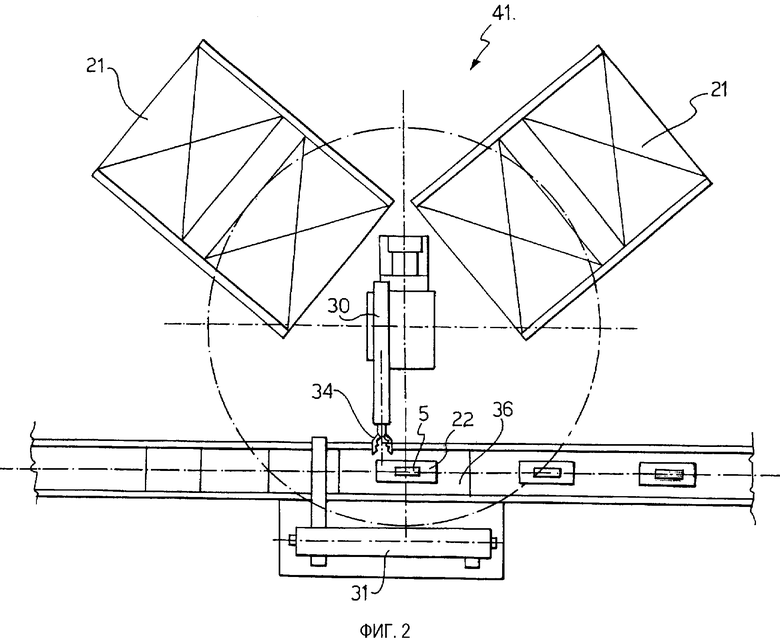
- Фиг. 2 показывает применение способа согласно настоящему изобретению.
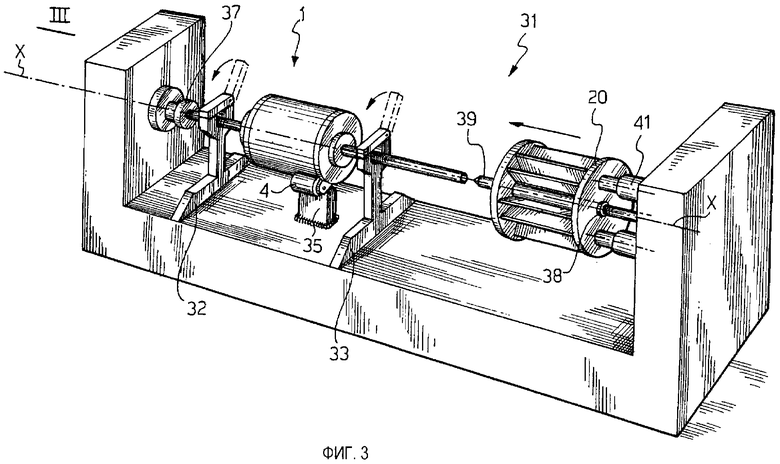
- Фиг. 3 показывает детальный вид конструкции по Фиг. 2.
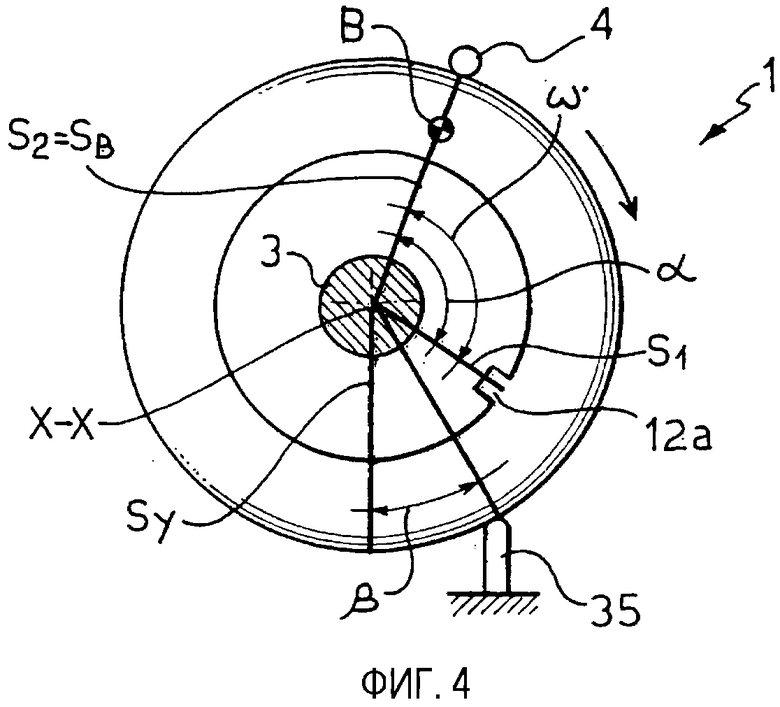
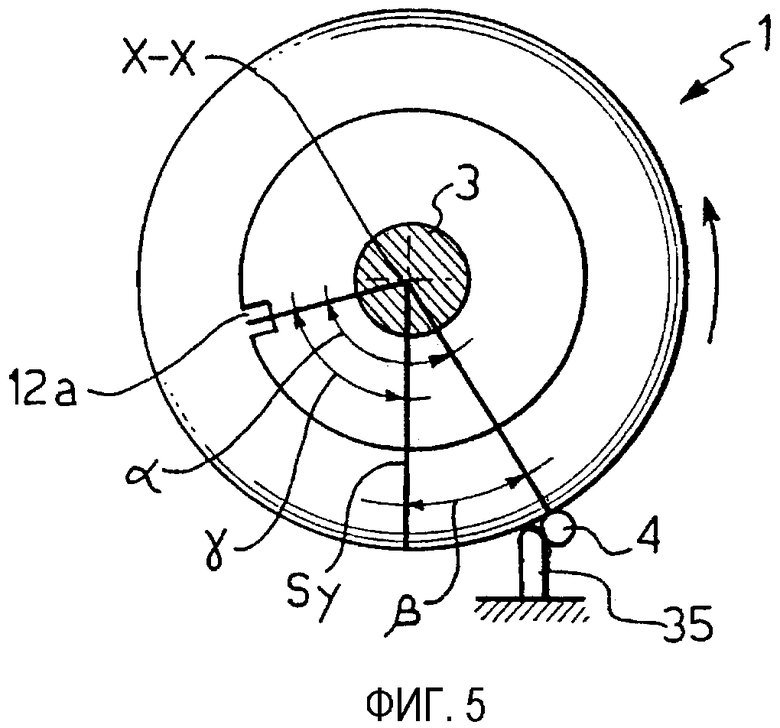
- Фиг. 4-6 показывают схематические боковые проекции электродвигателя, показываемого на Фиг. 3, в направлении стрелки III на Фиг. 3, на разных этапах способа согласно настоящему изобретению.
Обращаясь к чертежам, Фиг. 1 обозначает электродвигатель, устанавливаемый и позиционируемый в опоре 5 электродвигателя с помощью способа согласно данному изобретению.
Подобно обычному электродвигателю обычного типа электродвигатель 1 имеет несущую нагрузку опорную конструкцию 2 для статорного элемента (не показан) и приводной вал 3, с которым соединен ротор (не показан).
Излагаемый ниже пример относится к электродвигателю для вентиляторного/конвекторного оборудования для привода пары вентиляторов.
Для осуществления привода пары вентиляторов приводной вал 3 выступает из обоих торцов электродвигателя 1 вдоль продольной оси вращения (Х-Х).
В приводимом ниже описании ссылка делается на вентилятор 20 (Фиг. 3) и описание также относится к другому вентилятору, который на чертежах не показан.
Электродвигатель 1 имеет смещенный центр тяжести В по отношению к ведущему валу 3.
Согласно одной из особенностей настоящего изобретения эксцентриситет электродвигателя 1 обусловлен наличием средства 4 углового отсчета, выступающего из электродвигателя 1.
Согласно предпочтительному осуществлению средство 4 углового отсчета выполнено в виде электроконденсатора.
Электроконденсатор 4 выполняет функцию стартера на этапе пуска электродвигателя 1 и обычно монтируется на внешней части несущей нагрузку конструкции 2 электродвигателя 1.
Электродвигатель 1 выполнен с возможностью установки и позиционирования в опоре 5 электродвигателя, функция которой заключается в том, что на нее опирается во время его работы электродвигатель 1. В частности, в вентиляторах/конвекторах опора 5 электродвигателя соединена с лотком 22 (Фиг. 2) для сбора конденсата согласно известному способу, здесь не описываемому.
Согласно предпочтительному осуществлению опора 5 электродвигателя выполнена в виде листовой металлической конструкции, согнутой в форме буквы U, имеющей основание 6 и пару боковых стенок 7 и 8. Боковые стенки 7 и 8 имеют соответствующие углубления 9 и 10, в которые входят соответствующие части 11 и 12 электродвигателя 1.
В соответствии со способом данного изобретения электродвигатель имеет позиционирующие средства 11а и 12а, выполненные в соответствующих частях 11 и 12 электродвигателя 1; и опора 5 электродвигателя имеет сопрягающиеся соответствующие позиционирующие средства 9а и 10а. Позиционирующие средства 11а и 12а электродвигателя 1 обеспечивают блокирующее соединение с сопрягающимися позиционирующими средствами 9а и 10а опоры 5 электродвигателя.
Из приводимого ниже описания следует, что позиционирующие средства 9а, 10а, 11а и 12а используются не только для верного позиционирования электродвигателя 1 в опоре 5 электродвигателя, но также и для центрирования электродвигателя 1 по отношению к опоре 5 электродвигателя.
Согласно предпочтительному осуществлению позиционирующие средства 11а и 12а электродвигателя 1 выполнены в виде кожуха охватывающего типа в частях 11 и 12 электродвигателя 1 соответственно.
Согласно предпочтительному осуществлению части 11 и 12 электродвигателя 1 соответствуют амортизаторам электродвигателя 1, расположенным на каждом из торцов приводного вала 3 электродвигателя 1.
Позиционирующие средства 9а и 10а опоры 5 электродвигателя имеют форму выступа охватываемого типа, выполненного соответственно в углублениях 9 и 10 боковых стенок 7 и 8 опоры 5 электродвигателя, выполненных с возможностью вмещения в них электродвигателя 1.
Позиционирующие средства 9а и 10а опоры 5 электродвигателя, являющиеся выступами 9а и 10а охватываемого типа, предпочтительно выполнены в нижней части углублений 9 и 10.
Либо можно переменить положения позиционирующих средств 9а, 10а, 11а и 12а без ущерба применимости способа согласно настоящему изобретению.
Для простоты описания: приводимое ниже описание относится к позиционирующим средствам 10а и 12а, расположенным на одной стороне конструкции, включающей в себя электродвигатель 1 и опору 5 электродвигателя; при этом описание в отношении позиционирующих средств 9а и 11а на противоположной стороне является эквивалентным.
Позиционирующее средство 12а электродвигателя 1 имеет угловое смещение на заданный угол смещения  , измеряемый между проекцией на одну и ту же плоскость
, измеряемый между проекцией на одну и ту же плоскость  , перпендикулярную к оси вращения Х-Х, двух линий S1 и SB, отходящих от оси вращения Х-Х перпендикулярно и проходящих через позиционирующее средство 12а и центр тяжести В соответственно.
, перпендикулярную к оси вращения Х-Х, двух линий S1 и SB, отходящих от оси вращения Х-Х перпендикулярно и проходящих через позиционирующее средство 12а и центр тяжести В соответственно.
Заданный угол  , измеряемый между прямой линией S1 и прямой линией SB, предпочтительно соответствует меньшему углу, измеряемому между позиционирующим средством 12а и центром тяжести В; при этом также присутствует угол 360-
, измеряемый между прямой линией S1 и прямой линией SB, предпочтительно соответствует меньшему углу, измеряемому между позиционирующим средством 12а и центром тяжести В; при этом также присутствует угол 360- .
.
Позиционирующее средство 12а электродвигателя 1 и средство 4 углового отсчета имеют угловое смещение на заданный угол  смещения, измеряемый между выступами на одной и той же плоскости, перпендикулярной к оси вращения Х-Х, например на плоскости
смещения, измеряемый между выступами на одной и той же плоскости, перпендикулярной к оси вращения Х-Х, например на плоскости  прямой линии S1 и прямой линии S2. Прямая линия S2 отходит от оси вращения Х-Х перпендикулярно и проходит через средство 4 углового отсчета.
прямой линии S1 и прямой линии S2. Прямая линия S2 отходит от оси вращения Х-Х перпендикулярно и проходит через средство 4 углового отсчета.
Заданный угол  смещения, измеряемый между прямой линией S1 и прямой линией S2, предпочтительно соответствует меньшему углу, измеряемому между позиционирующим средством 12а и конденсатором 4; при этом также присутствует угол 360-
смещения, измеряемый между прямой линией S1 и прямой линией S2, предпочтительно соответствует меньшему углу, измеряемому между позиционирующим средством 12а и конденсатором 4; при этом также присутствует угол 360- .
.
Согласно Фиг. 4: в этом случае прямые линии S2 и SB совпадают в том, что угловое положение центра тяжести В определяется конденсатором 4. Разумеется, углы  и
и  могут отличаться друг от друга.
могут отличаться друг от друга.
Для применения способа согласно настоящему изобретению предполагается, что углы и оба известны заранее. Фактически и положение, в котором электроконденсатор 4 установлен на несущей нагрузку конструкции 2 электродвигателя 1, и положение, в котором выполнен охватывающий кожух 12а, т.е. положение центра тяжести В, известны заранее, либо, по меньшей мере, могут быть измерены заранее.
Осуществление способа согласно настоящему изобретению излагается со ссылкой на автоматизированную линию, на которой робот 30 должен устанавливать и правильно позиционировать электродвигатель 1 в опоре 5 электродвигателя.
В частности, предполагается, что робот 30, электродвигатель 1 и опора 5 электродвигателя находятся в рабочей станции 41 (Фиг. 2) автоматизированной производственной линии (на чертежах не показана). Рабочая станция 41 для сборки опоры двигателя-вентилятора-двигателя имеет рабочий блок 31, в котором выполняется ряд операций, позволяющих роботу 30 знать по меньшей мере одно пространственное положение электродвигателя 1, например угловое положение электродвигателя 1 (относительно оси вращения Х-Х).
В случае автоматизированной производственной линии для вентиляторных конвекторов электродвигатель 1 должен быть собран с вентилятором 20. Эта операция предпочтительно выполняется в рабочем блоке 31. В этих целях необходимо, чтобы робот знал еще одно положение электродвигателя 1, т.е. линейное положение согласно приводимому ниже более подробному описанию со ссылкой на этап сборки вентилятора 20 с электродвигателем 1.
Рабочая станция 31 содержит опорные средства 32 и 33, на которые опирается электродвигатель 1 своим ведущим валом 3, и средство 35 фиксирования углового положения, функция которого поясняется в приводимом ниже описании.
Согласно предпочтительному осуществлению электродвигатель 1 и опора 5 электродвигателя находятся на поддоне 36 транспортирования заготовок в разные рабочие блоки по автоматизированной линии. Опора 5 электродвигателя на поддоне 36 предпочтительно уже заранее собрана с лотком 22 сбора конденсата.
Либо электродвигатель 1, опора 5 электродвигателя и лоток 22 сбора конденсата расположены вблизи рабочего блока 31, например в зоне 21 хранения материала.
Робот 30 берет электродвигатель 1 с помощью захватов 34 и ставит его на опорные средства 32 и 33.
Согласно предпочтительному осуществлению: опорные средства 32 и 33 выполнены в виде пары опор с оконечностью, имеющей форму букв "U" или "V", для вмещения в них приводного вала 3 электродвигателя 1.
Электродвигатель 1 ведущим валом 3 опирается на опоры 32 и 33. В этом способе обеспечения опоры для электродвигателя 1 электродвигатель 1 или опорную конструкцию 2 можно свободно поворачивать на опорном вале 3 или по продольной оси вращения Х-Х за счет силы тяжести.
За счет силы тяжести или за счет наличия смещенного центра тяжести В электродвигатель 1 сам позиционируется таким образом, что центр тяжести В находится в точке минимальной потенциальной энергии, т.е. ниже ведущего вала 3 на вертикальной оси Y-Y, проходящей через ось вращения Х-Х.
Захваты 34, предпочтительно, но не обязательно, являются парой клещевых захватных устройств, каждое из которых берет ведущий вал 3 на противоположных сторонах по отношению к несущей нагрузку конструкции 2 электродвигателя 1. Свободный поворот электродвигателя 1 вокруг ведущего вала 3 поэтому обеспечивается имеющими соответствующую форму опорами 32 и 33.
На следующем этапе способа согласно настоящему изобретению электродвигатель 1 поворачивают в заданном направлении поворота вокруг ведущего вала 3 на величину компенсирующего угла  , зависящего от меньшего угла
, зависящего от меньшего угла  , чтобы ввести позиционирующее средство 12а электродвигателя 1 в угловое положение, в котором оно будет взаимодействовать с сопрягающимся позиционирующим средством 10а, когда электродвигатель 1 будет помещен на опору 5 электродвигателя.
, чтобы ввести позиционирующее средство 12а электродвигателя 1 в угловое положение, в котором оно будет взаимодействовать с сопрягающимся позиционирующим средством 10а, когда электродвигатель 1 будет помещен на опору 5 электродвигателя.
Электродвигатель 1 поворачивается на ведущем вале 3 роботом, который может быть тем же роботом 30 или другим роботом, выполняющим эту задачу. При выполнении этого поворота обеспечивается возможность удобного захвата электродвигателя 1 опорной конструкцией 2 таким образом, чтобы определенный поворот опорной конструкции 2 соответствовал равному повороту позиционирующего средства 12а электродвигателя 1 вокруг ведущего вала 3.
После этого поворота электродвигатель 1 готов к установке и точному позиционированию на опоре 5 электродвигателя.
Нужно отметить, что это осуществление способа может иногда обусловить значительную погрешность, если угол  будет определен неправильно. В действительности, по причине трения электродвигателя и из-за других случайностей может получиться так, что угол
будет определен неправильно. В действительности, по причине трения электродвигателя и из-за других случайностей может получиться так, что угол  сможет изменяться от двигателя к двигателю, следовательно, в ущерб эффективности способа согласно настоящему изобретению. Т.е. двигатели, конструкционно одинаковые и однотипные, свободно поворачиваемые вокруг вала 3 вращения, могут останавливаться в немного разных положениях. Поскольку компенсационный угол
сможет изменяться от двигателя к двигателю, следовательно, в ущерб эффективности способа согласно настоящему изобретению. Т.е. двигатели, конструкционно одинаковые и однотипные, свободно поворачиваемые вокруг вала 3 вращения, могут останавливаться в немного разных положениях. Поскольку компенсационный угол  зависит от угла
зависит от угла  и поскольку электродвигатель 1 поворачивается на угол, равный компенсационному углу
и поскольку электродвигатель 1 поворачивается на угол, равный компенсационному углу  , поэтому позиционирующее средство 12а, возможно, не будет находиться в таком угловом положении, чтобы можно было взаимодействовать с соответствующим позиционирующим средством 10а в опоре 1 электродвигателя без постоянного изменения компенсирующего угла . Для устранения этого недостатка используется средство 35 фиксирования углового положения, которое выполнено, например, в виде стопора биения (Фиг. 3).
, поэтому позиционирующее средство 12а, возможно, не будет находиться в таком угловом положении, чтобы можно было взаимодействовать с соответствующим позиционирующим средством 10а в опоре 1 электродвигателя без постоянного изменения компенсирующего угла . Для устранения этого недостатка используется средство 35 фиксирования углового положения, которое выполнено, например, в виде стопора биения (Фиг. 3).
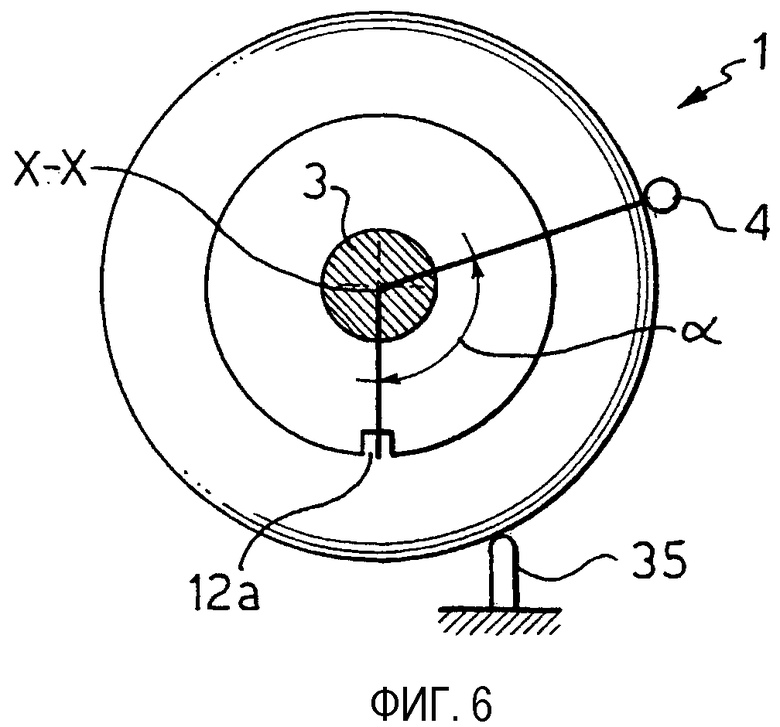
Электродвигатель 1 опирается на опоры 32 и 33 с возможностью поворота за счет силы тяжести вокруг приводного вала 3. Цель этого поворота заключается в том, чтобы ввести средство углового отсчета, т.е. конденсатор 4, в примыкание к средству 35 фиксирования углового положения под заданным стопорным углом  по отношению к прямой линии SY, проходящей вертикально вниз от оси вращения Х-Х.
по отношению к прямой линии SY, проходящей вертикально вниз от оси вращения Х-Х.
Это особо целесообразно в том отношении, что стопор 35 находится в положении, известном роботу 30, в результате чего угловое положение электродвигателя 1 на оси вращения Х-Х также становится известным. Эти сведения необходимы для осуществления способа в соответствии с настоящим изобретением.
Таким образом, свободный поворот электродвигателя 1 вокруг приводного вала 3 вводит конденсатор 4 в примыкание к стопору 35 (Фиг. 4) и поэтому этот поворот должен выполняться в определенном направлении, например по часовой стрелке согласно Фиг. 4. Если свободный поворот происходит против часовой стрелки, например, если конденсатор 4 расположен в левой полуплоскости, опираясь на опоры 32 и 33, то должен быть обеспечен датчик препятствия (который для упрощения на чертежах не показан) для обнаружения неверного углового положения или неверного поворота электродвигателя 1 и для направления соответствующего сигнала роботу 30. Получив этот сигнал, робот 30 будет поворачивать электродвигатель 1 вокруг вала 3 вращения до тех пор, пока не будет достигнут стопор 35. При этом интеллектуальная система обучающегося типа будет следить за угловым поворотом электродвигателя 1, чтобы затем использовать его значение, когда датчик препятствия будет обнаруживать такую же ситуацию.
Статистическая частота повторения этой ситуации приемлема для типичной производственной линии. Нужно отметить, что электродвигатели поступают в сборочное предприятие в упаковке или оболочке из формованных листовых термопластов. Эта оболочка имеет кожух для конденсатора 4, расположенный в известном положении, например в конусе, имеющем угол 60°. Но положение конденсатора 4 может измениться из-за ударов, тряски и аналогичных перемещений во время транспортирования. По этой причине эту информацию невозможно использовать как известную, но существует приемлемая вероятность того, что конденсатор все же будет находиться в правильной полуплоскости. В этом случае свободный поворот будет происходить согласно вышеизложенному и в ином случае будет действовать датчик препятствия.
Затем электродвигатель 1 поворачивают в заданном направлении поворота вокруг приводного вала 3 на величину компенсирующего угла в зависимости от угла  смещения и стопорного угла
смещения и стопорного угла  , чтобы ввести позиционирующее средство 12а электродвигателя 1 в угловое положение для взаимодействия с сопрягающимся позиционирующим средством 10а, когда электродвигатель 1 находится в опоре 5 электродвигателя.
, чтобы ввести позиционирующее средство 12а электродвигателя 1 в угловое положение для взаимодействия с сопрягающимся позиционирующим средством 10а, когда электродвигатель 1 находится в опоре 5 электродвигателя.
Фиг. 4-6 показывают осуществление способа согласно настоящему изобретению со ссылкой на вариант, когда присутствует угловое средство 35 фиксирования углового положения. На чертежах Фиг. 4-6 размеры электродвигателя 1, конденсатора 4, углового средства 35 фиксирования углового положения и позиционирующего средства 12а не указаны.
Согласно Фиг. 5 электродвигатель 1 поворачивается против часовой стрелки на приводном вале 3 на значение компенсирующего угла , равного разнице между углом  смещения и стопорным углом
смещения и стопорным углом  . Угол
. Угол  смещения предпочтительно равен 120°, и стопорный угол
смещения предпочтительно равен 120°, и стопорный угол  равен 15°.
равен 15°.
В предпочтительном осуществлении угол  смещения равен 180° для оптимизации робота 30 при повороте электродвигателя 1 вокруг приводного вала 3.
смещения равен 180° для оптимизации робота 30 при повороте электродвигателя 1 вокруг приводного вала 3.
На следующем этапе способа согласно настоящему изобретению электродвигатель 1 устанавливают в опоре 5 электродвигателя таким образом, что между позиционирующими средствами 11а и 12а электродвигателя 1 и позиционирующими средствами 9а и 10а опоры 5 электродвигателя создается блокирующая связь.
При правильном введении электродвигателя 1 в опору 5 электродвигателя он противодействует вращению, осуществляемому, например, роботом 30, который продолжает поворачивать конструкцию 2 электродвигателя 1 вокруг оси вращения Х-Х. Таким образом, робот 30 обнаруживает пару сил, противодействующую повороту электродвигателя 1, правильно установленного и позиционированного на опоре 5 электродвигателя. После превышения заданного значения пары блокирующее соединение между позиционирующими средствами 9а и 10в опоры 5 электродвигателя и позиционирующими средствами 11а и 12а электродвигателя 1 считается хорошим.
Электродвигатель 1 можно установить в опоре 5 электродвигателя по-разному.
Согласно предпочтительному осуществлению: электродвигатель 1 поднимают с опор 32 и 33 роботом 30 или другим роботом и перемещают поперечно по отношению к опоре 5 электродвигателя, заранее собранной с лотком 22 сбора конденсата, помещенным на поддоне 36.
Нужно отметить, что для исключения неправильного относительного расположения позиционирующего средства 12а электродвигателя 1, находящегося в угловом положении, чтобы обеспечить возможность блокирующей связи с соответствующим сопрягающимся позиционирующим средством 10а в опоре 5 электродвигателя, необходимо выполнить поперечное перемещение, препятствующее повороту электродвигателя 1 вокруг приводного вала 3. Эту операцию выполняют известным методом при помощи робота 30.
Наконец, электродвигатель 1 стабильно прикрепляют к опоре 5 двумя фигурными стальными пружинами 13. Пружины 13 берутся из футляра двумя налагающими элементами, форма которых соответствует упругой форме пружины 13 и которые прижимают пружины 13 к амортизаторам 11 и 12 электродвигателя 1. Пружины, вталкиваемые таким образом, защелкиваются на защелках 14, выполненных в опоре 5 электродвигателя.
Если электродвигатель 1 используется с вентиляторным конвектором, то электродвигатель 1 должен быть собран с парой вентиляторов. Эту операцию предпочтительно выполняют до этапа поворота электродвигателя 1 на значение компенсирующего угла .
Способ сборки электродвигателя 1 с вентилятором, например с вентилятором 20, на части приводного вала 3 излагается ниже, и способ сборки вентилятора на противоположной части очевидно эквивалентен. В частности, ступица 38 вентилятора 20 прикреплена к приводному валу 3 посадкой с натягом.
Электродвигатель 1 расположен в рабочем блоке 31, опираясь на опоры 32 и 33, и при этом конденсатор 4 примыкает к средству 35 фиксирования углового положения.
Приводной вал 3 толкают, например, роботом 30 в осевом направлении оси вращения Х-Х, чтобы привести его в примыкание к осевому стопору 37. Таким образом становится известным линейное положение электродвигателя 1, помимо углового положения. Эта операция необходима по той причине, что электродвигатели могут иметь разные размеры приводного вала и поэтому необходимо знать положение, до которого вентилятор 20 нужно прижимать на приводном вале 3.
Затем опоры 32 и 33 крепят приводной вал 3, стопоря приводной вал по оси вращения Х-Х. Эту операцию выполняют, например, затягиванием средства, прикрепленного к концам опор 32 и 33 (Фиг. 3), и она необходима, чтобы предотвратить повреждение ротора электродвигателя во время последующего этапа прикрепления.
Вентилятор 20 опирается на вспомогательный вал 39, проходящий по оси вращения Х-Х, совершенно соосной с приводным валом 39; и направляется этим вспомогательным валом соосно с указанным приводным валом.
Двумя толкающими элементами 41 вентилятор 20 толкают в осевом направлении к приводному валу в направлении оси вращения Х-Х, чтобы прикрепить ступицу 38 вентилятора 20 на приводном вале 3 при помощи посадки с натягом. Толкающие элементы создают, например, усилие величиной 30 кг для обеспечения правильной сборки.
После сборки электродвигателя 1 с вентилятором робот 30 затем устанавливает электродвигатель 1 в опоре 5 электродвигателя.
Из приводимого выше описания очевидно следует, что установка и позиционирование электродвигателя в опоре электродвигателя согласно настоящему изобретению обеспечивает возможность выполнения требования и устранения недостатков, указываемых в вводной части этого описания в отношении известного уровня техники.
Преимущества использования применения способа согласно настоящему изобретению в основном заключаются в том, что они содействуют автоматизации сборки электродвигателя 1 с опорой 5 электродвигателя согласно настоящему изобретению. Помимо этого, отсутствие дополнительных компонентов, которые сделали бы данные массы асимметричными, обеспечивает возможность достижения улучшенного динамического равновесия агрегата «электродвигатель/вентилятор».
Изобретение относится к области электротехники и касается способов установки и позиционирования электродвигателя в опоре электродвигателя. Сущность изобретения состоит в том, что электродвигатель (1) содержит приводной вал (3), выступающий из двух торцов упомянутого электродвигателя (1) по продольной оси вращения (Х-Х) и имеющий смещенный центр тяжести (В) по отношению к приводному валу (3), а также позиционирующие средства (11а, 12а), выполненные с возможностью обеспечения блокирующего соединения с соответствующими сопрягающимися позиционирующими средствами (9а, 10а) опоры (5), при этом позиционирующие средства (11а, 12а) смещены на заданный угол смещения (ω), измеряемый между проекцией на одну плоскость (Σ), перпендикулярную к оси вращения (X-X), двух прямых линий (S1, Sв), которые проходят от оси вращения (X-X) перпендикулярно и проходят через упомянутые позиционирующие средства (11а, 12а) и упомянутый центр тяжести (В) соответственно. Предлагаемый способ установки и позиционирования электродвигателя (1) в опоре (5) электродвигателя включает в себя этапы, согласно которым электродвигатель (1) опирается на приводной вал (3) для обеспечения возможности поворота электродвигателя (1) вокруг приводного вала (3) на величину компенсирующего угла (γ) за счет силы тяжести, чтобы привести позиционирующие средства (11а, 12а) в положение, обеспечивающее соединение с сопрягающимися позиционирующими средствами (9а, 10а) и установку электродвигателя (1) в опоре (5). Технический результат, достигаемый настоящим изобретением, состоит в упрощении электродвигателя, выполненного с возможностью его установки в опоре, и обеспечении автоматизации его сборки с опорой, а также в улучшении динамического равновесия агрегата, включающего такой электродвигатель. 3 н. и 3 з.п. ф-лы, 6 ил.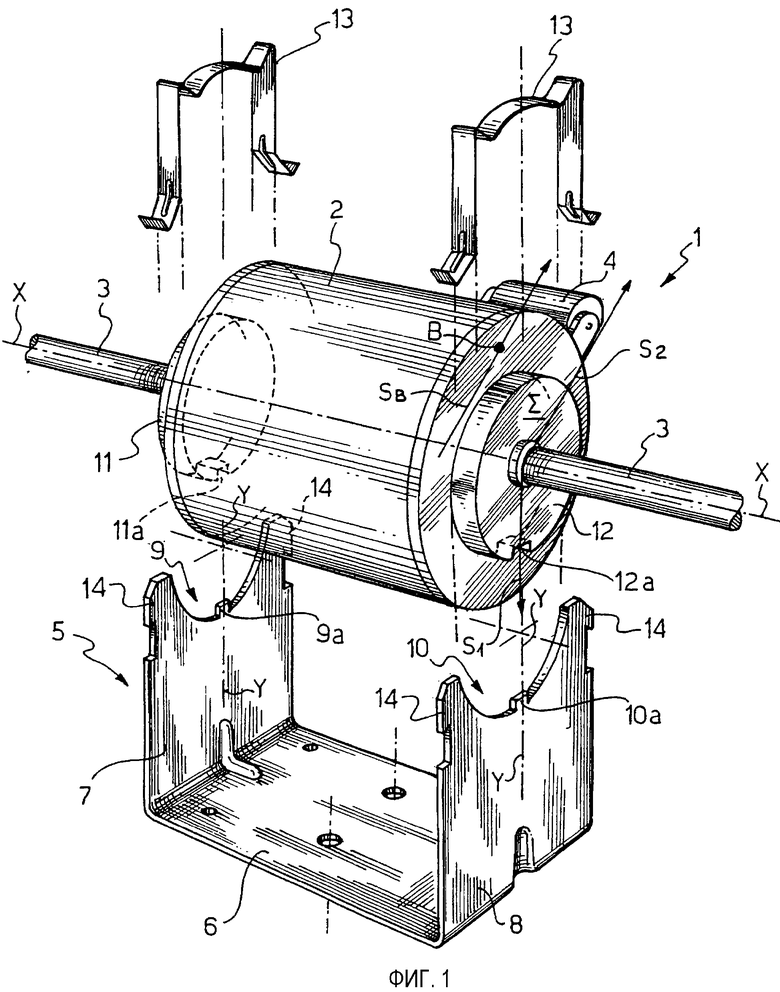
| DE 8808854 U, 02.11.1989 | |||
| Устройство для закрепления корпуса электрической машины | 1981 |
|
SU1001320A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1996 |
|
RU2123751C1 |
| US 5488259 A, 30.06.1996 | |||
| Измерительный трансформатор тока | 1983 |
|
SU1119089A1 |
| US 4033531 A, 05.07.1977 | |||
| US 4076196 A, 28.02.1978 | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| WO 03012960 A1, 13.02.2003. | |||

