Изобретение относится к конструкции посадочной платформы для беспилотного летательного аппарата (далее - БПЛА) вертикального взлета и посадки, и может применяться при разработке автоматических станции зарядки и обслуживания БПЛА.
Как правило, отклонение БПЛА вертикального взлета и посадки от заданной точки посадки усложняет или не позволяет производить замену/зарядку аккумуляторов или производить какие-либо другие манипуляции с БПЛА в автоматическом режиме. Поэтому посадочные платформы БПЛА снабжаются устройством позиционирования БПЛА в процессе или после посадки.
Известны автоматические станции зарядки и обслуживания БПЛА, содержащие пассивные устройства позиционирования БПЛА при приземлении.
Автоматическая станция, согласно патента US 9,139,310 В1, содержит конические воронки на посадочной платформе по местам расположения шасси БПЛА. Данная конструкция позиционирует БПЛА, если отклонение от точки посадки не более радиуса конуса воронки в верхней части. Данная конструкция способна принимать аппараты с таким же расположением шасси.
Посадочная платформа для БПЛА, согласно US D805,018 S, выполнена по размеру расположения опор БПЛА и содержит вокруг наклонные поверхности. После посадки БПЛА скатывается по этим поверхностям и позиционируется на посадочной платформе.
Посадочное устройство БПЛА, согласно US 9,499,265 В2, содержит посадочную платформу в виде конического углубления, в котором установлены контакты для зарядки аккумулятора, сменный аккумулятор и другие устройства. БПЛА имеет кольцевую опору, от которой поднимаются ножки, образующие каркас направленной острием вниз усеченной пирамиды. Точность позиционирования при посадке обеспечивается взаимодействием кольцевой опоры и ножек с коническим углублением. Позиционирование по вертикальной оси вращения достигается вращением опорной поверхности посадочной платформы вокруг вертикальной оси. Источник предусматривает возможность выполнения посадочной праформы в виде многоугольника. В этом случае опора БПЛА должна иметь ту же форму, и это позволяет обеспечить нужную ориентацию без вращения опорной поверхности посадочной платформы.
Система стыковки с воздушным транспортным средством US 9,561,871 В2 включает в себя посадочную площадку и воздушное транспортное средство. У посадочной площадки имеется опускающаяся к центру коническая поверхность. В центре имеется углубление по размерам посадочной поверхности воздушного транспортного средства. В воздушном транспортном средстве имеется посадочная поверхность с колесами. Выступ и посадочное устройство размещены на нижней поверхности воздушного судна. После посадки на коническую поверхность воздушное транспортное средство скатывается к центру, и ее посадочная поверхность опускается в центральное углубление. На воздушном транспортном средстве и посадочной площадке имеются контакты для подачи напряжения для зарядки аккумулятора, которые контактируют между собой.
Посадочное устройство БПЛА, согласно US 2016/00395.41 А1 содержит посадочную площадку, выполненную в виде короны, посадочное устройство БПЛА в виде двух расположенных накрест стержней. Во впадинах размещены контакты для подачи зарядного напряжения, на посадочных стержнях размещены ответные контакты. Посадочная платформа имеет механизмы для фиксации посадочных стержней. На посадочной платформе содержатся источники излучения, на БПЛА видеокамера или датчики излучения.
Известны автоматические станции зарядки и обслуживания БПЛА, в которых после посадки на платформу производится корректировка его местоположения каким-либо активным устройством (манипулятором), которое воздействует на опоры БПЛА.
Автоматическая станция, согласно заявке US 2014/0124621 А1, принимает БПЛА на плоскую посадочную платформу. Механизм позиционирования содержит две пары параллельных планок, которые установлены ортогонально друг другу. После посадки БПЛА механизм выравнивания перемещает попарно планками БПЛА в зону позиционирования, в которой осуществляется зарядка, замена аккумулятора или иной вид обслуживания. Для лучшего обслуживания БПЛА может дополнительно фиксироваться специальным устройством или механизмом выравнивания.
Согласно заявке WO 2017/221235 А1 механизм выравнивания содержит всего две установленные встречно планки, на которых выполнены W-образные вырезы. Расстояние между внутренними точками вырезов равно расстоянию между опор принимаемого БПЛА вертикального взлета и посадки. Такое решение упрощает конструкцию и ускоряет процесс выравнивания.
Автоматическая станция, согласно заявке US 2014/0319272 А1, также принимает БПЛА на плоскую посадочную платформу, однако после этого БПЛА с помощью двух планок выводит аппарат их зоны посадки в зону зарядки и обслуживания.
Прототипом изобретения является посадочная платформа согласно заявке US 20180148170 А1, которая содержит устройство для позиционирования БПЛА путем воздействия после посадки на его опоры. Устройство содержит установленную по центру платформы на вертикальной оси крестовину и пятачки контактов для подачи напряжения для зарядки аккумулятора БПЛА или связи с ним. После посадки БПЛА крестовина приводится во вращение. Взаимодействие крестовины с опорами и опор с посадочной поверхностью приводят к вращению БПЛА и смещению его до совпадения вертикальной оси БПЛА и оси вращения крестовины. Вращение крестовины длится до тех пор, пока опоры БПЛА не встанут на пятачки.
Недостатком данного устройства является
невысокая скорость позиционирования БПЛА,
отсутствие механизма удержания БПЛА на позиции зарядки,
невысокая точность позиционирования после посадки БПЛА, невысокая надежность электрических контактов.
Указанные недостатки не позволяют использовать данную посадочную платформу на подвижных объектах.
Технической задачей изобретения является:
Создание быстродействующая посадочная платформы для БПЛА вертикального взлета и посадки с надежным удержанием БПЛА;
Создание посадочной платформы, пригодной как для стационарных установок, так и для оснащения подвижных объектов;
Создание универсальной посадочной платформы для различных конфигурации принимаемых БПЛА;
Обеспечение точности позиционирования БПЛА на посадочной поверхности посадочной площадки;
Обеспечение в активном режиме высокой надежности посадки БПЛА путем повышения точности приземление принимаемого БПЛА;
Обеспечение надежного электрического контакта с расположенным на посадочной платформе БПЛА.
Технический результат достигается тем, что посадочная платформа БПЛА вертикального взлета и посадки содержит посадочную поверхность, электрические контакты и устройство позиционирования БПЛА, которое в соответствии с предложенным решением выполнено в виде ирисовых диафрагм, соединенных с приводом закрывания/открывания.
Оптимально, чтобы посадочная платформа для БПЛА вертикального взлета и посадки содержала не менее двух ирисовых диафрагм.
Посадочная платформа для БПЛА вертикального взлета и посадки предполагает, что на ирисовые диафрагмы могут быть установлены дополнительные ирисовые диафрагмы.
Посадочная платформа для БПЛА вертикального взлета и посадки предполагает, что верхние поверхности ирисовых диафрагм могут быть выполнены в виде воронок.
Посадочная платформа для БПЛА вертикального взлета и посадки предполагает, что на верхние поверхности ирисовых диафрагм могут быть установлены воронки.
Посадочная платформа для БПЛА вертикального взлета и посадки предполагает, что каждая ирисовая диафрагма может иметь собственный привод закрывания/открывания диафрагмы.
Посадочная платформа для БПЛА вертикального взлета и посадки предполагает, что ирисовые диафрагмы могут быть кинематически связаны между собой и/или соединены с единым приводом закрывания/открывания диафрагм.
Посадочная платформа для БПЛА вертикального взлета и посадки предполагает, что привод/приводы закрывания/открывания диафрагм ирисовых диафрагм содержат тормоз.
Посадочная платформа для БПЛА вертикального взлета и посадки предполагает, что привод/приводы закрывания/открывания диафрагм ирисовых диафрагм содержат самотормозящийся механизм.
Посадочная платформа для БПЛА вертикального взлета и посадки предполагает, что каждое звено кинематической схемы привода закрывания/открывания диафрагм может содержать упругую подвижную муфту.
Посадочная платформа для БПЛА вертикального взлета и посадки предполагает, что каждая ирисовая диафрагма установлена с возможностью упругого поворота относительно своей оси.
Посадочная платформа для БПЛА вертикального взлета и посадки предполагает, что по крайней мере, лепестки ирисовой диафрагмы выполнены из электропроводного материала.
Посадочная платформа БПЛА вертикального взлета и посадки содержит посадочную поверхность, электрические контакты и устройство позиционирования БПЛА, которое в соответствии с предложенным решением выполнено в виде ирисовых диафрагм, соединенных с приводом закрывания/открывания, и воронок, причем общее количество ирисовых диафрагм и воронок составляет не более максимального количества опор БПЛА.
Посадочная платформа для БПЛА вертикального взлета и посадки предполагает, что ирисовые диафрагмы и воронки выполнены подвижными.
Посадочная платформа для БПЛА вертикального взлета и посадки предполагает, что ирисовые диафрагмы и воронки соединены с приводами для перемещения по посадочной поверхности.
Посадочная платформа для БПЛА вертикального взлета и посадки предполагает, что ирисовые диафрагмы и воронки могут быть установлены на подвижные основания, каждое подвижное основание соединено с соответствующим приводом для перемещения.
Посадочная платформа для БПЛА вертикального взлета и посадки предполагает, что общее количество подвижных оснований равно максимальному количеству опор БПЛА, принимаемых данной посадочной платформой.
Посадочная платформа для БПЛА вертикального взлета и посадки предполагает, что содержит не менее одного датчика положения принимаемого БПЛА.
Сущность изобретения раскрывается следующим графическим материалом.
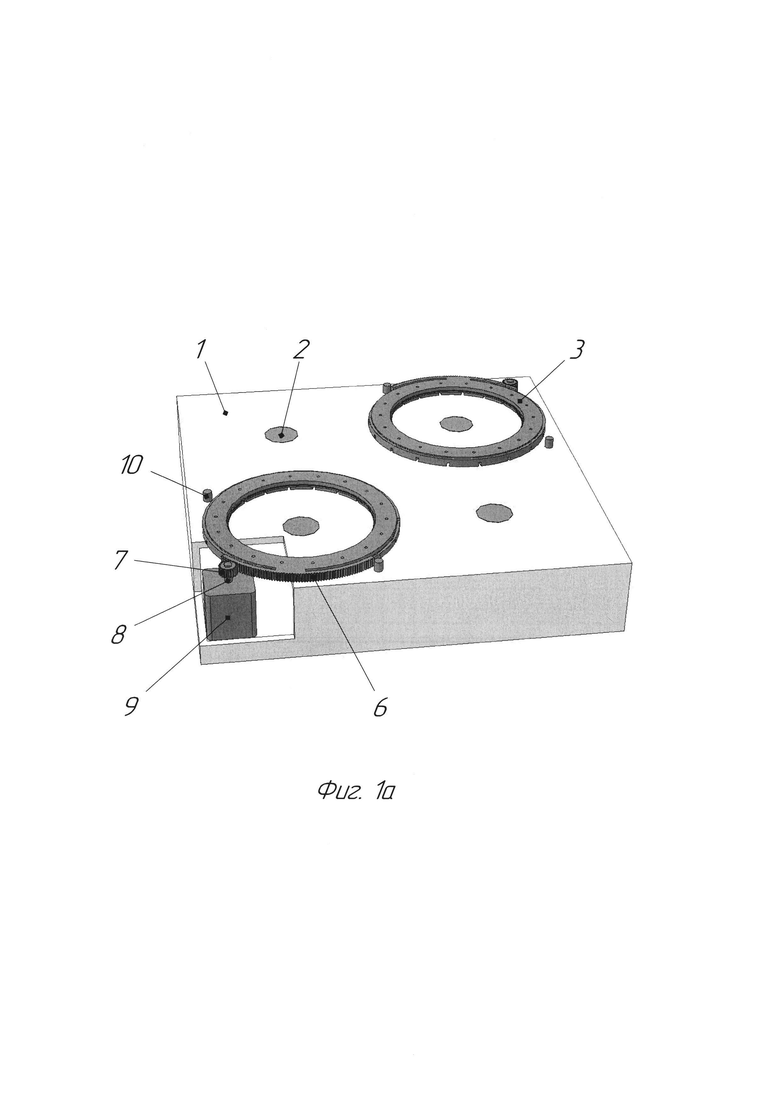
На фиг. 1а изображена посадочная платформа для БПЛА вертикального взлета и посадки, содержащая две ирисовые диафрагмы для позиционирования БПЛА.
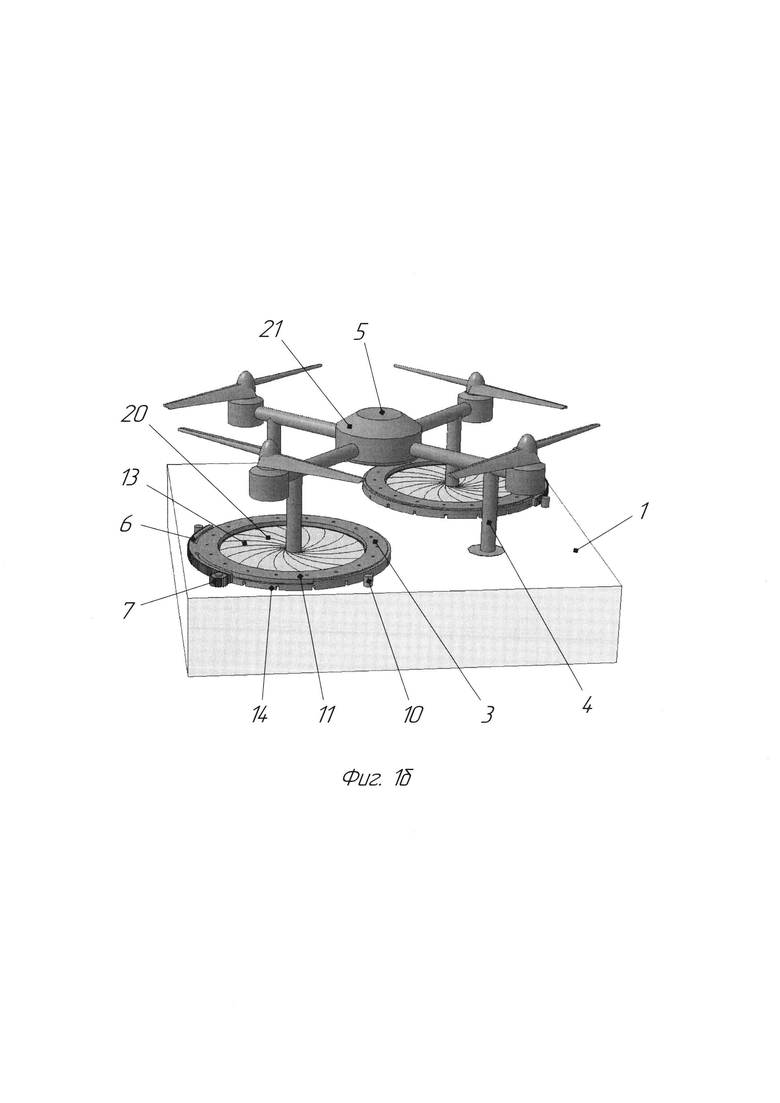
На фиг. 1б изображена посадочная платформа для БПЛА вертикального взлета и посадки, содержащая две ирисовые диафрагмы для позиционирования БПЛА с установленным и позиционированным БПЛА.
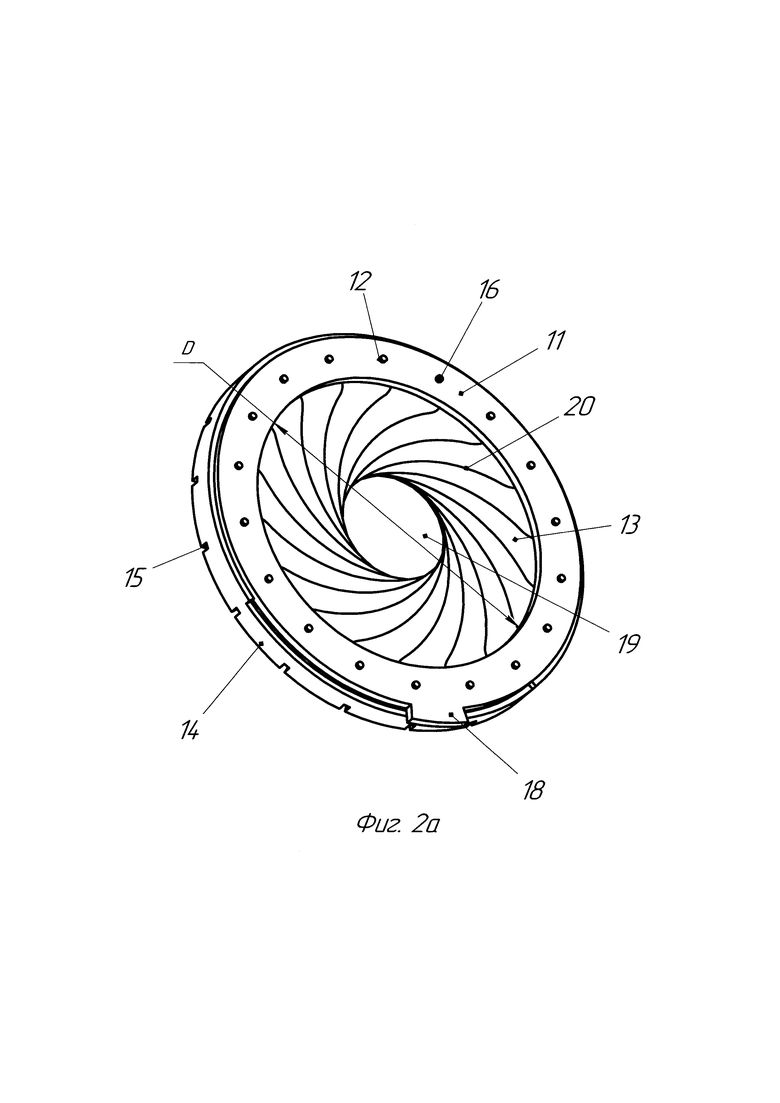
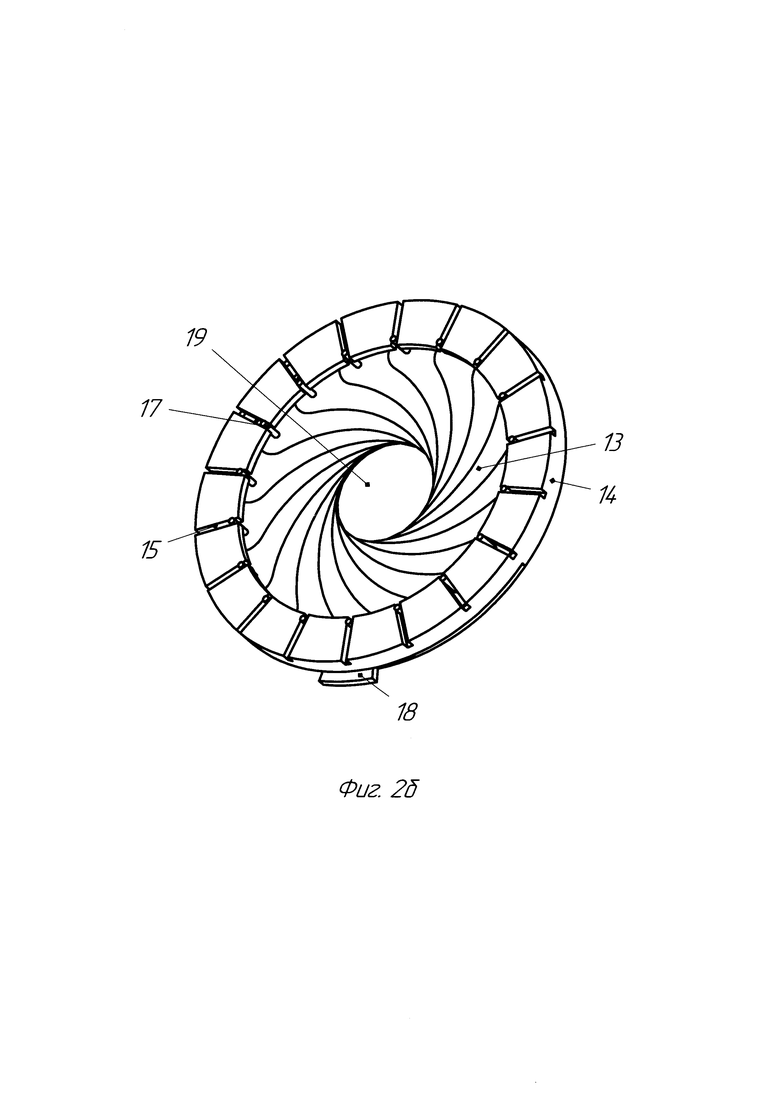
На фиг. 2а и 2б изображена ирисовая диафрагма, вид спереди и вид сзади.
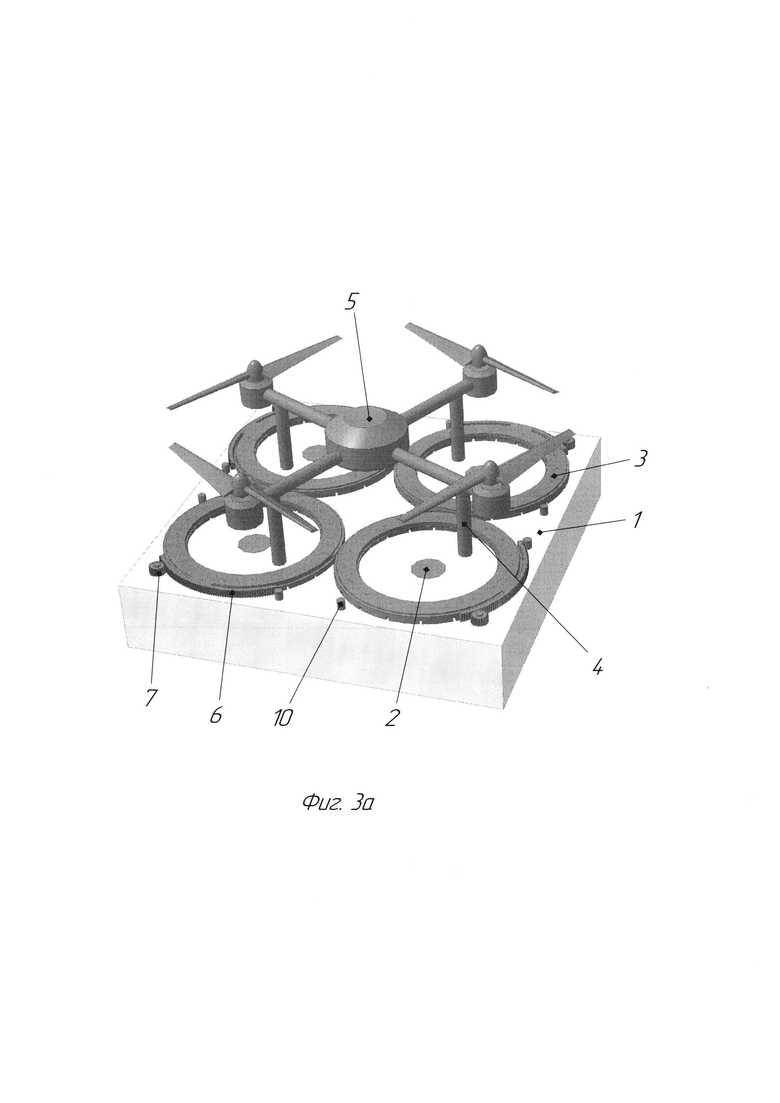
На фиг. 3а изображена посадочная платформа для БПЛА вертикального взлета и посадки содержащая количество ирисовых диафрагм для позиционирования БПЛА равное числу опор принимаемого БПЛА.
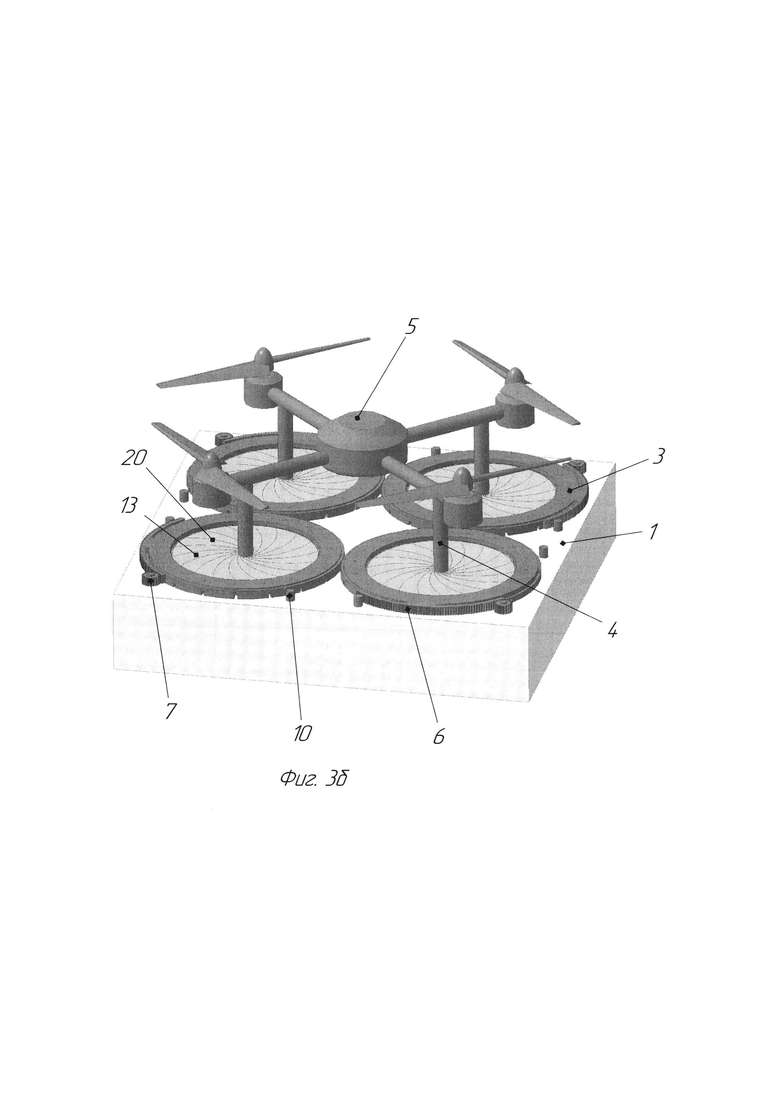
На фиг. 3б изображена посадочная платформа для БПЛА вертикального взлета и посадки содержащая количество ирисовых диафрагм для позиционирования БПЛА равное числу опор принимаемого БПЛА с установленным и позиционированным БПЛА.
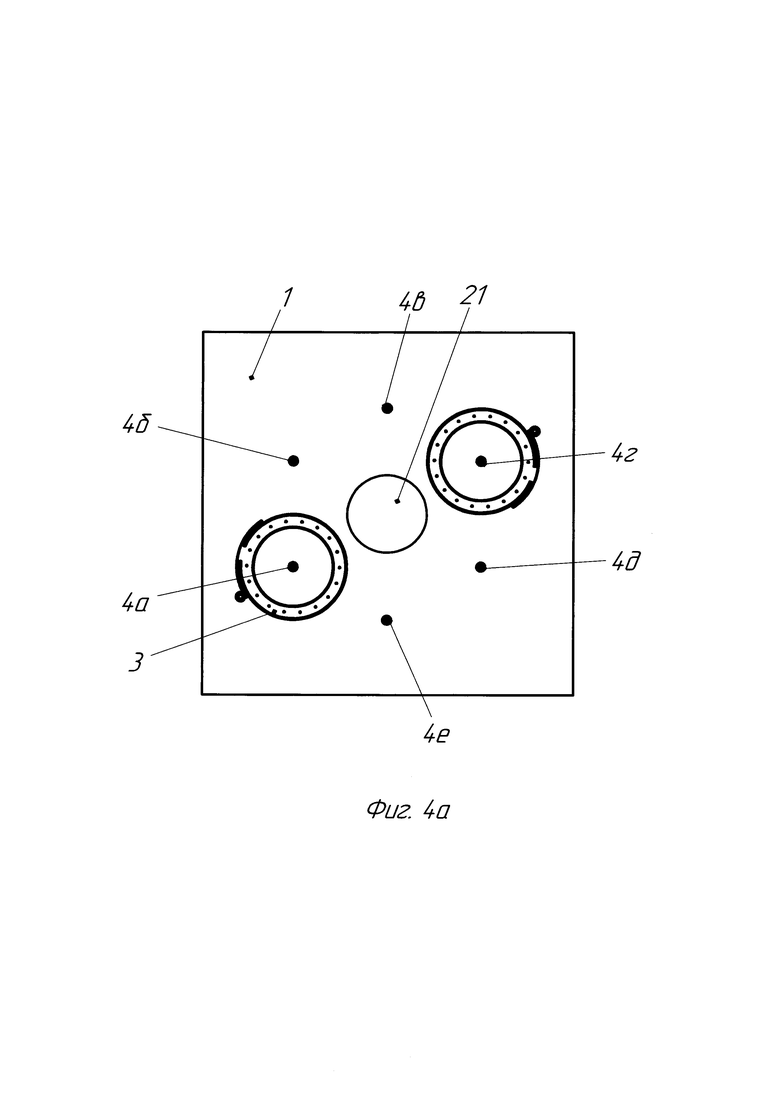
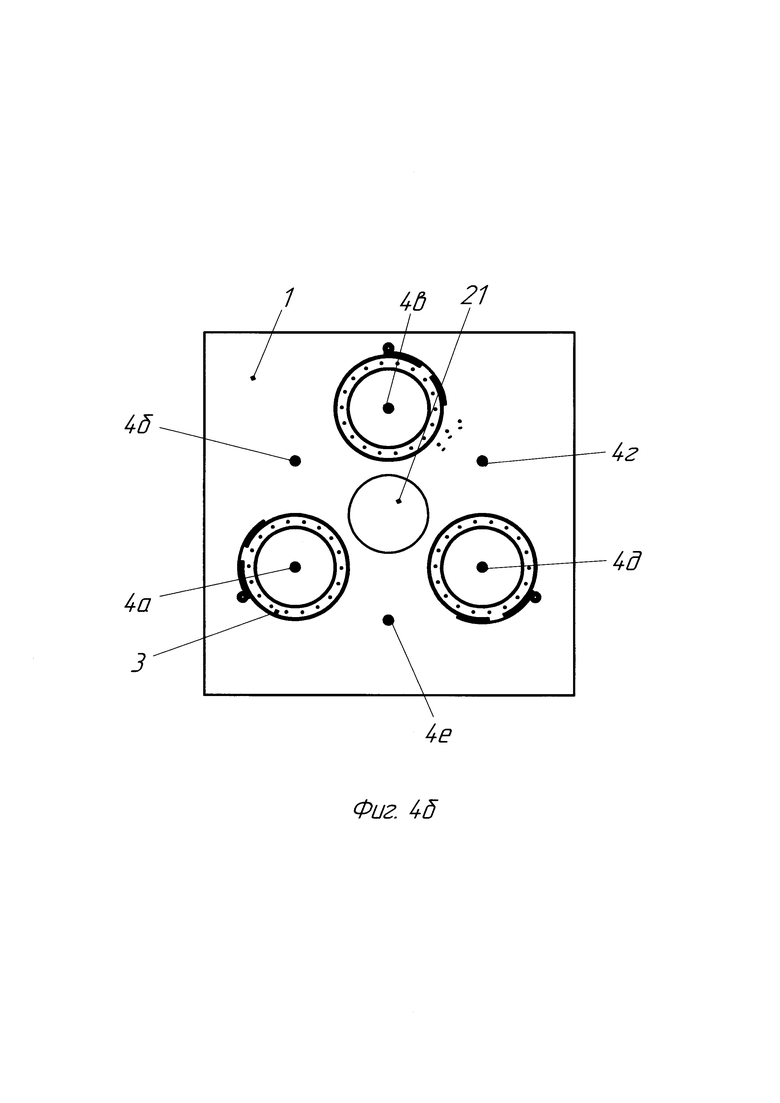
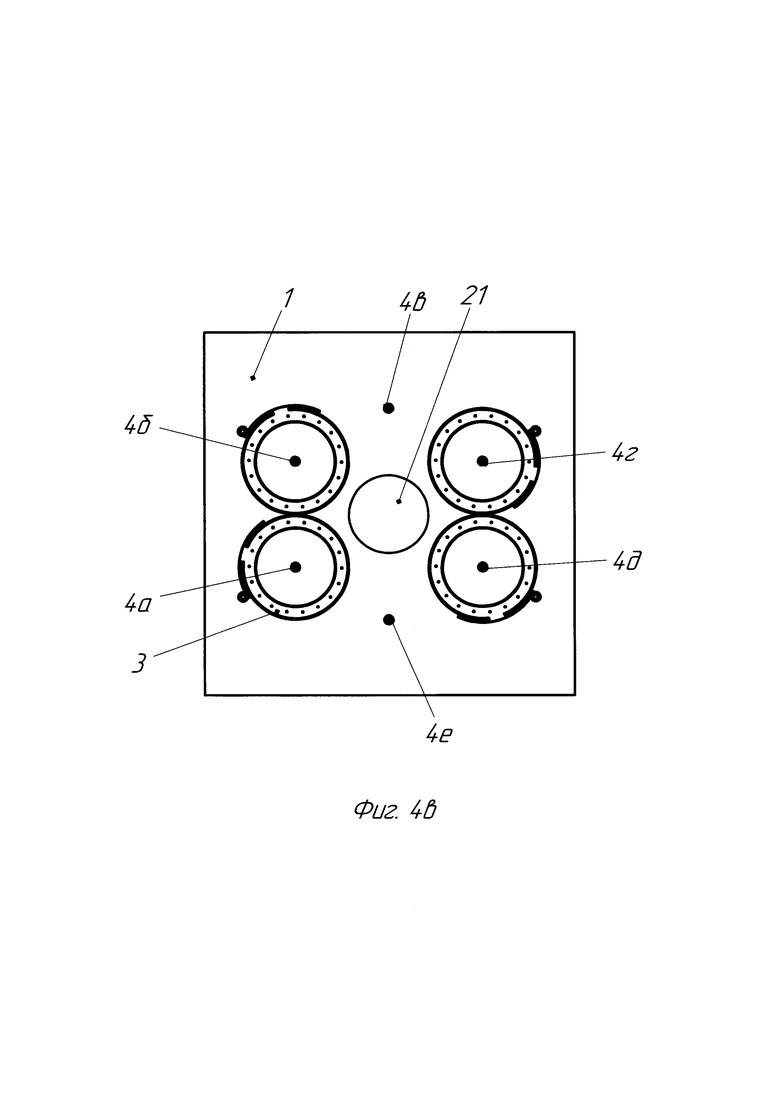
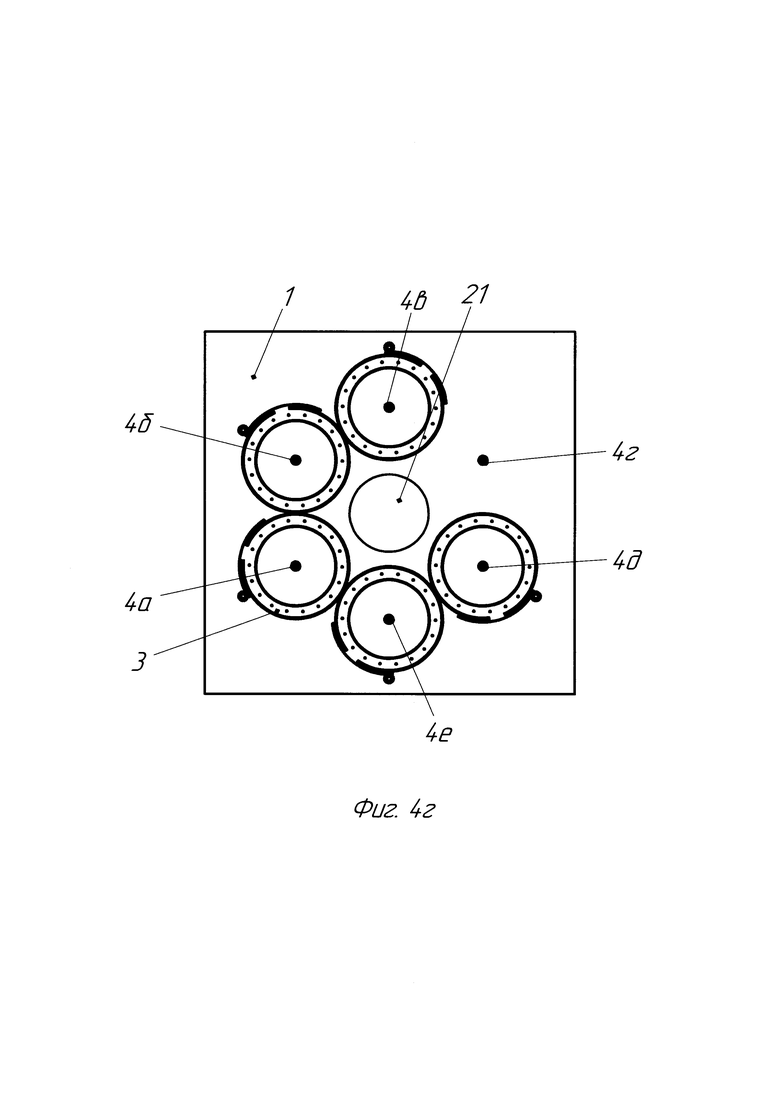
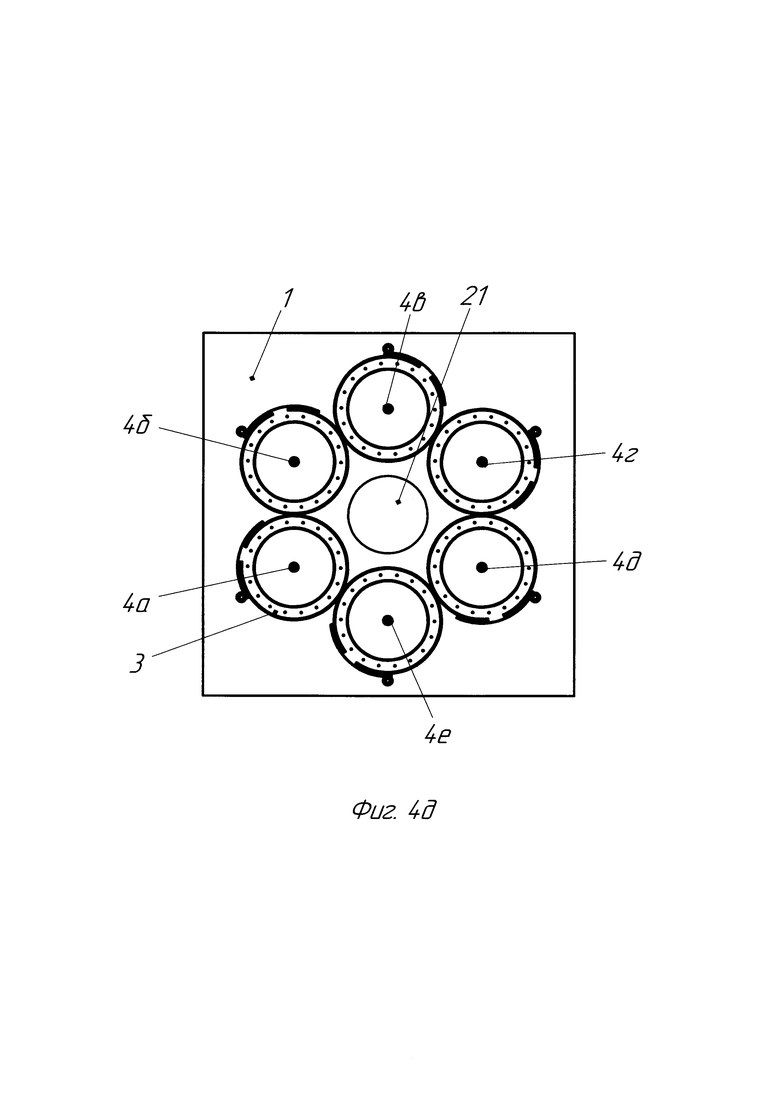
На фиг. 4а, 4б, 4в, 4г и 4д изображены варианты схем размещения ирисовых диафрагм на посадочной платформе в зависимости от их количества.
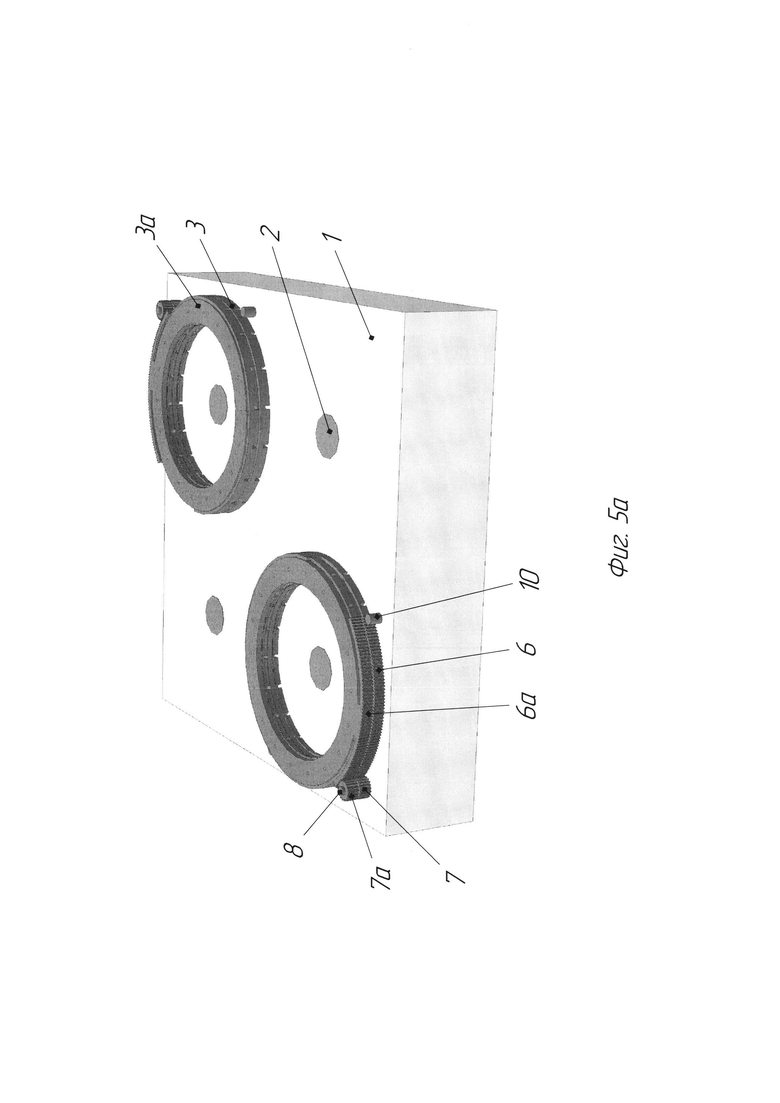
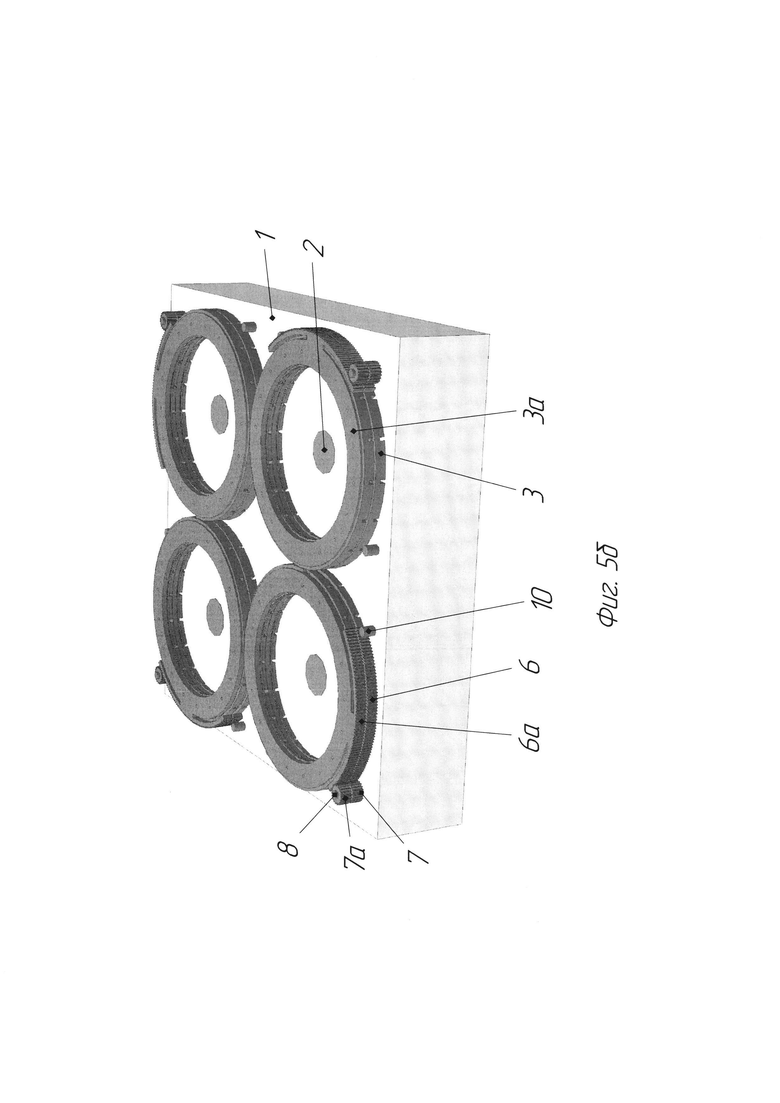
На фиг. 5а и 5б изображены посадочная платформа для БПЛА вертикального взлета и посадки в котором на ирисовые диафрагмы установлены дополнительные ирисовые диафрагмы.
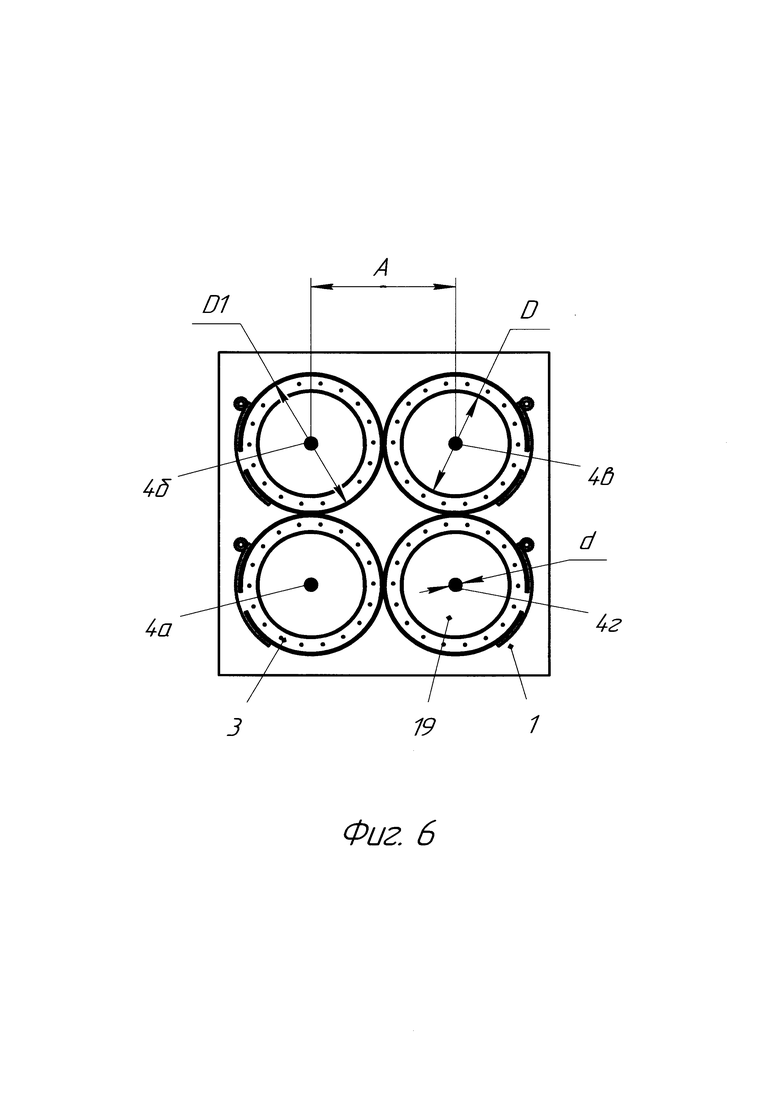
На фиг. 6 приведена схема для расчета допустимого отклонения посадки БПЛА при посадке на посадочную платформу с ирисовыми диафрагмами для успешного позиционирования.
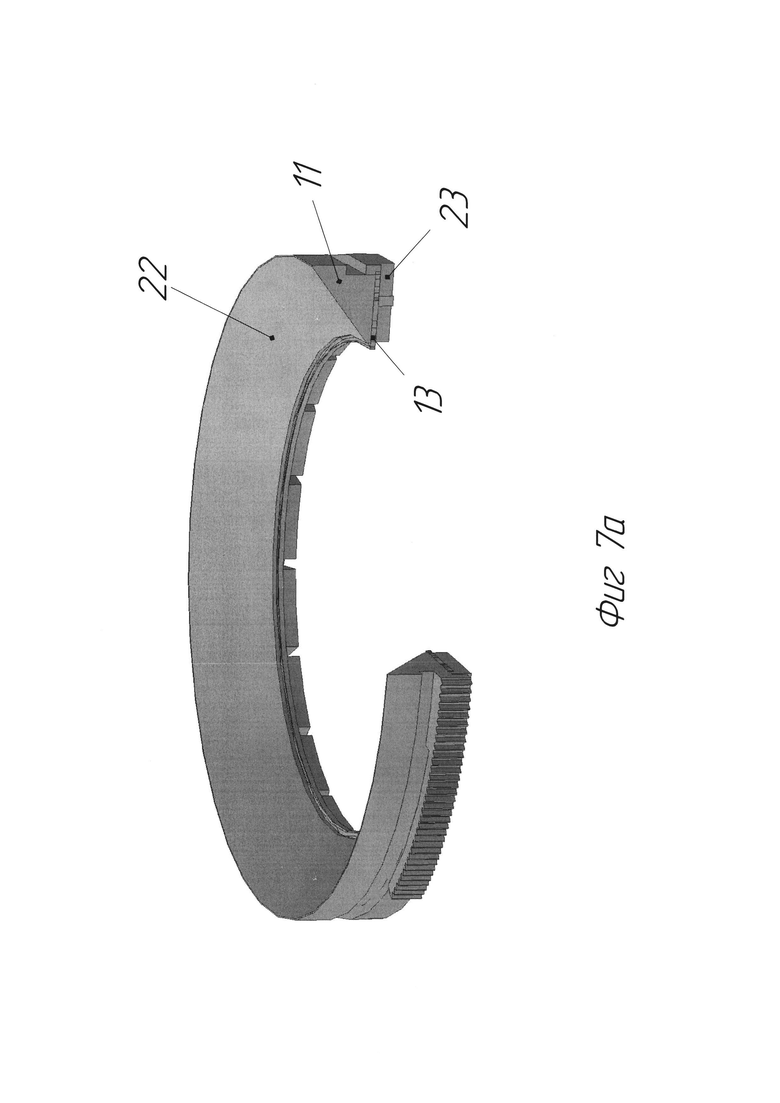
На фиг. 7а изображена ирисовая диафрагма, верхняя поверхность которой выполнена воронкой (разрез).
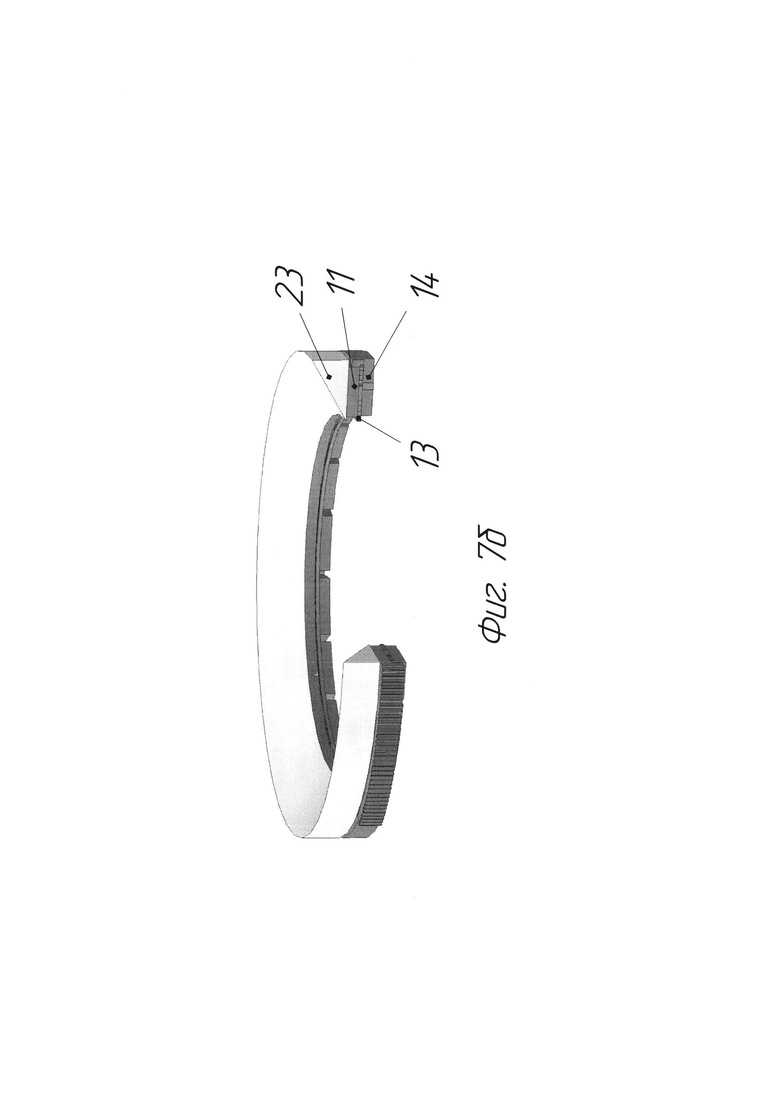
На фиг. 7б изображена ирисовая диафрагма, на верхнюю поверхность которой установлена накладка в виде воронки (разрез).
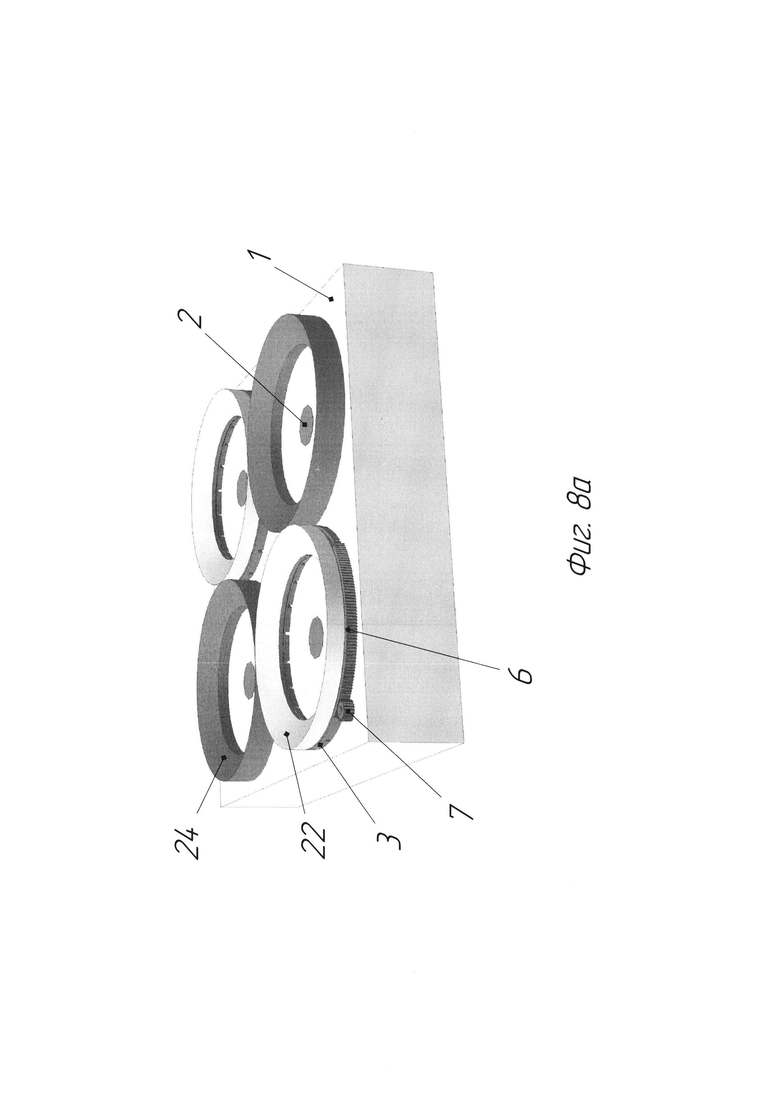
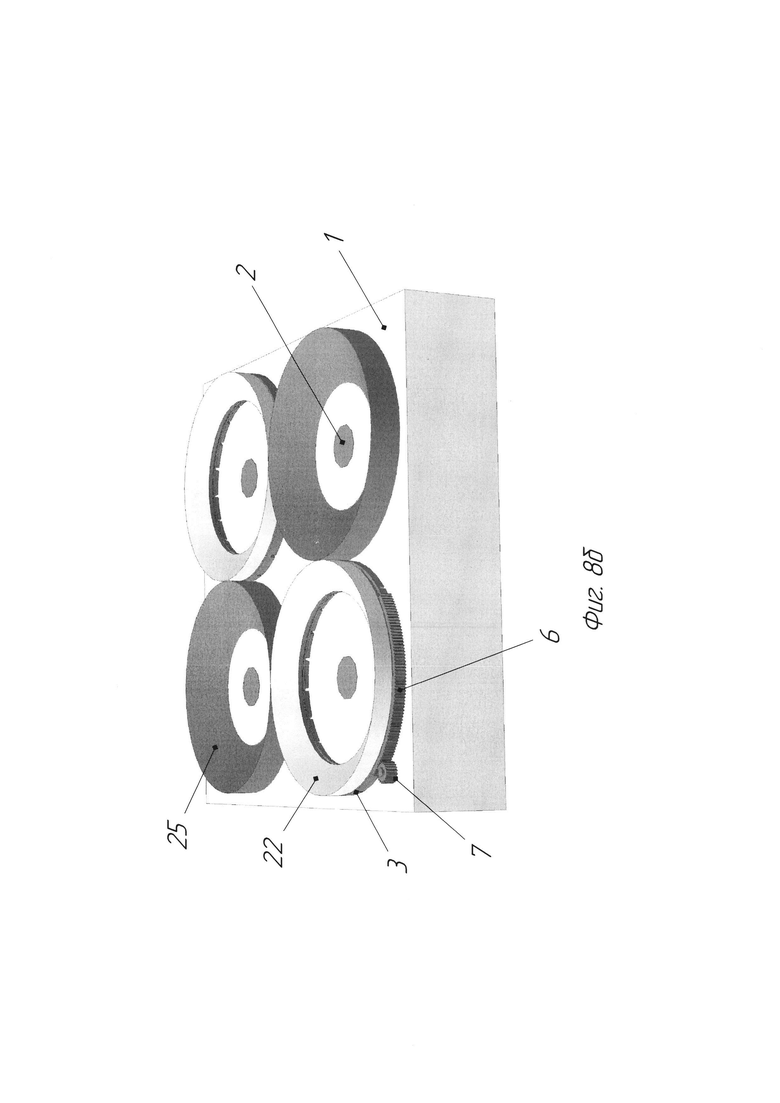
На фиг. 8а, 8б изображена посадочная платформа для БПЛА вертикального взлета и посадки с ирисовыми диафрагмами, верхние поверхность которых выполнена в виде воронки или на них установлена накладная воронка, и воронками
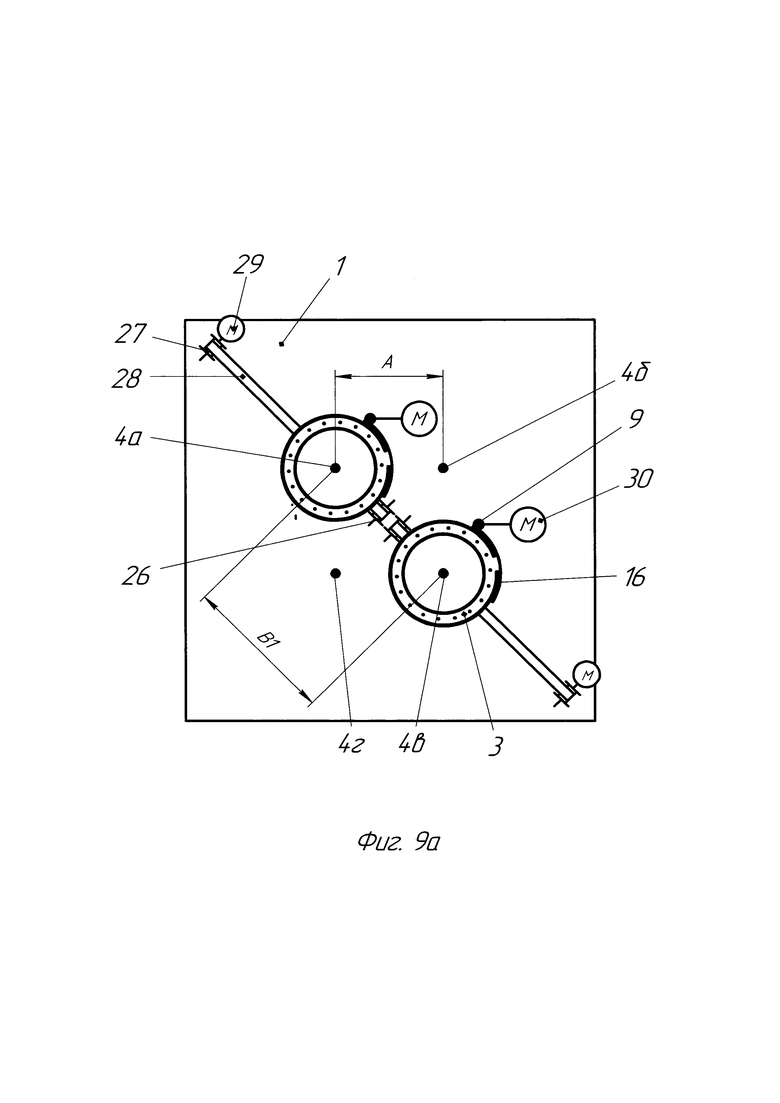
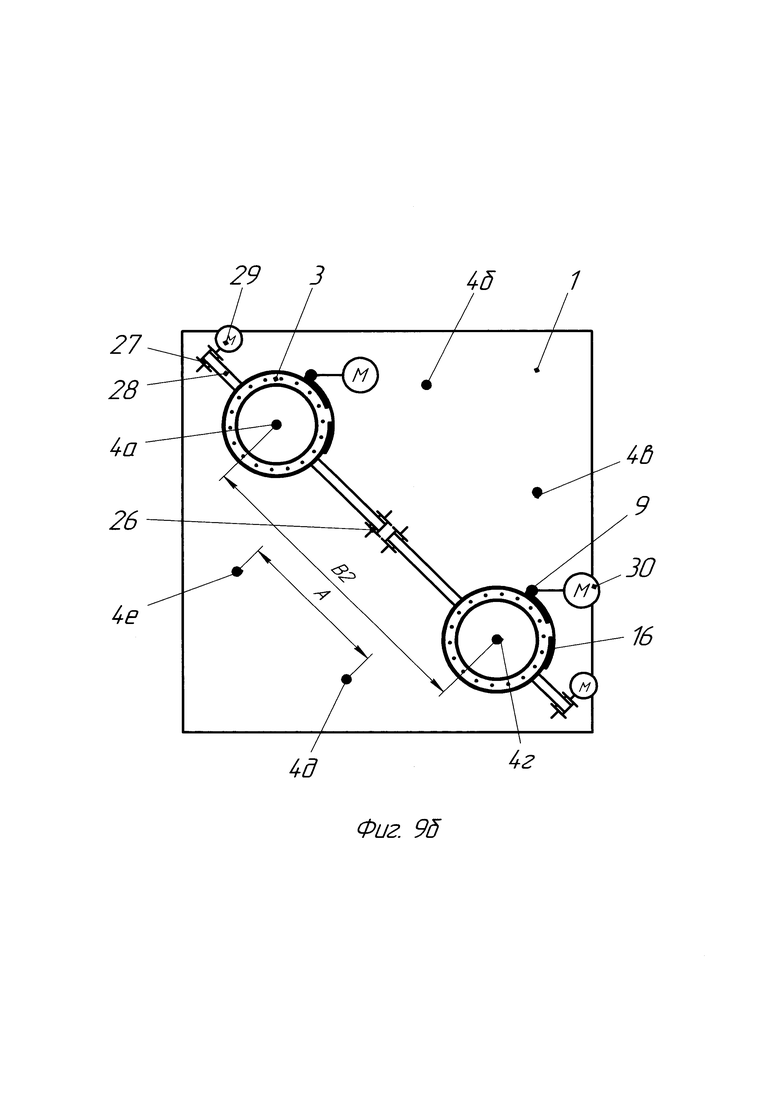
На фиг. 9а, 9б, изображена посадочная платформа с двумя подвижными ирисовыми диафрагмами.
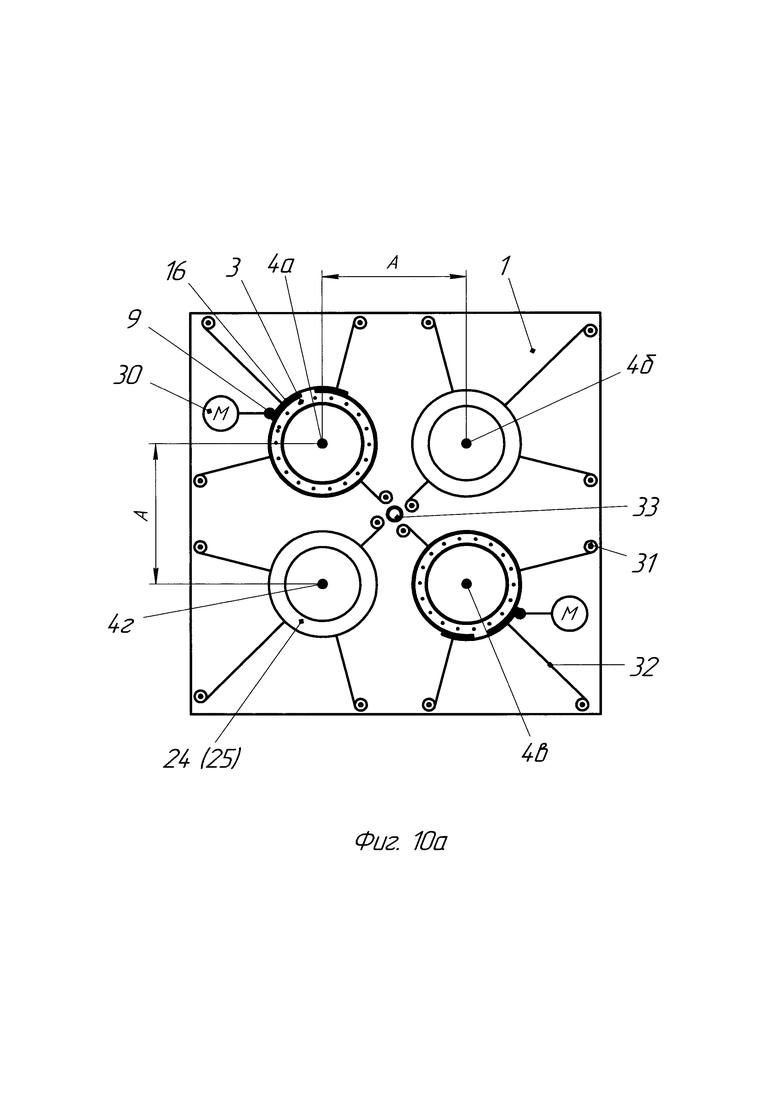
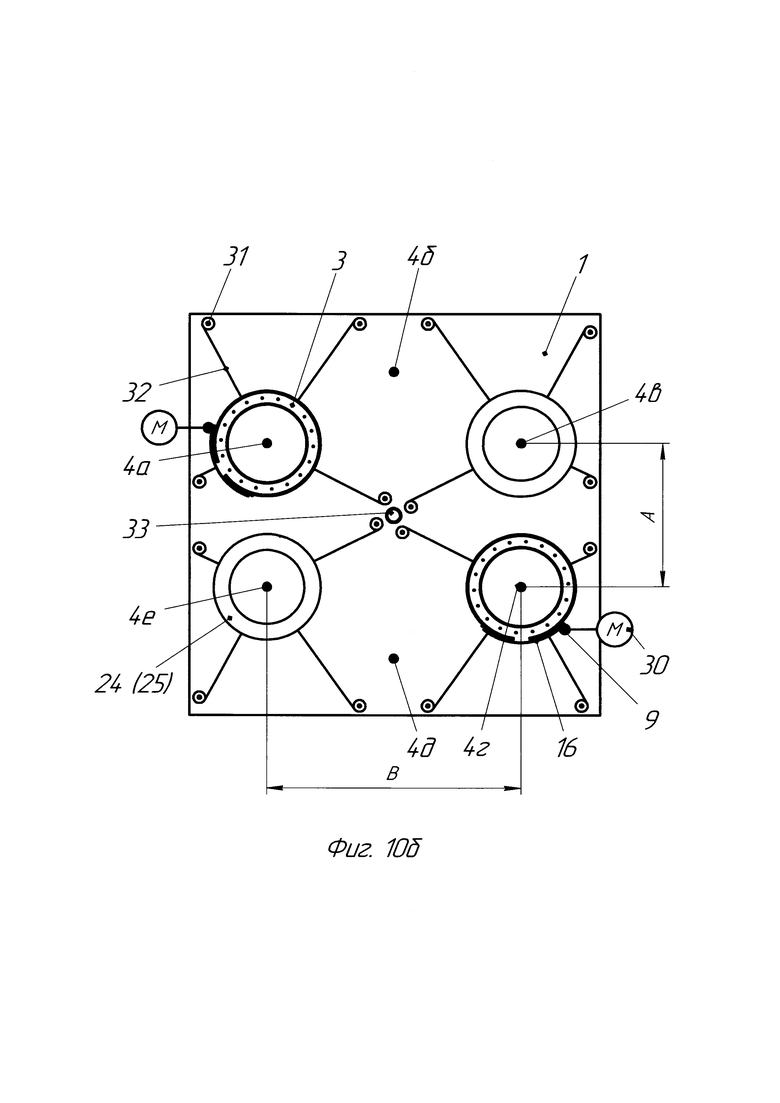
На фиг. 10а, 10б изображена посадочная платформа с подвижными ирисовыми диафрагмами и воронками.
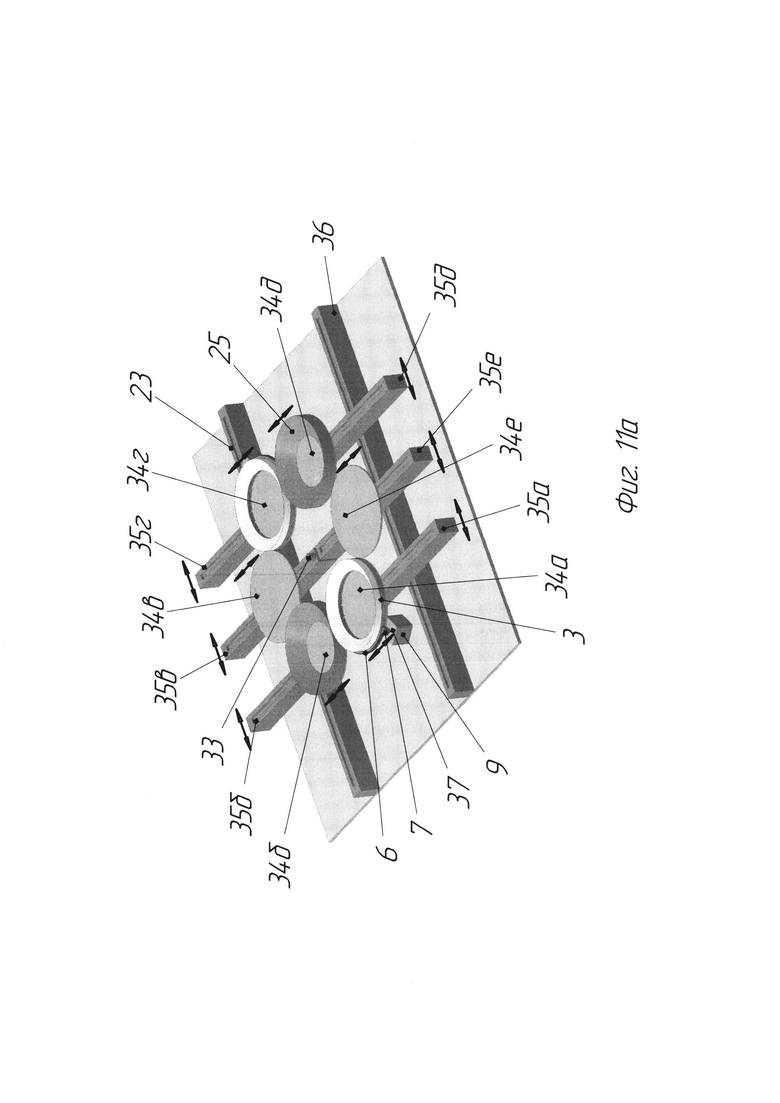
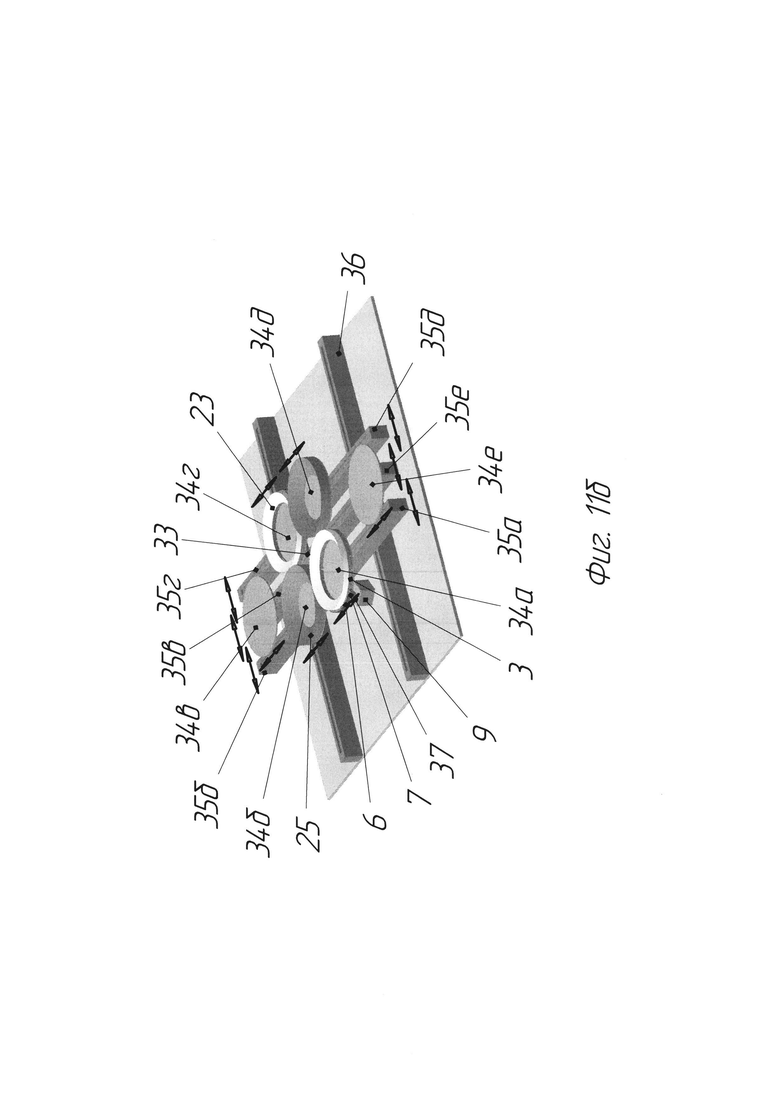
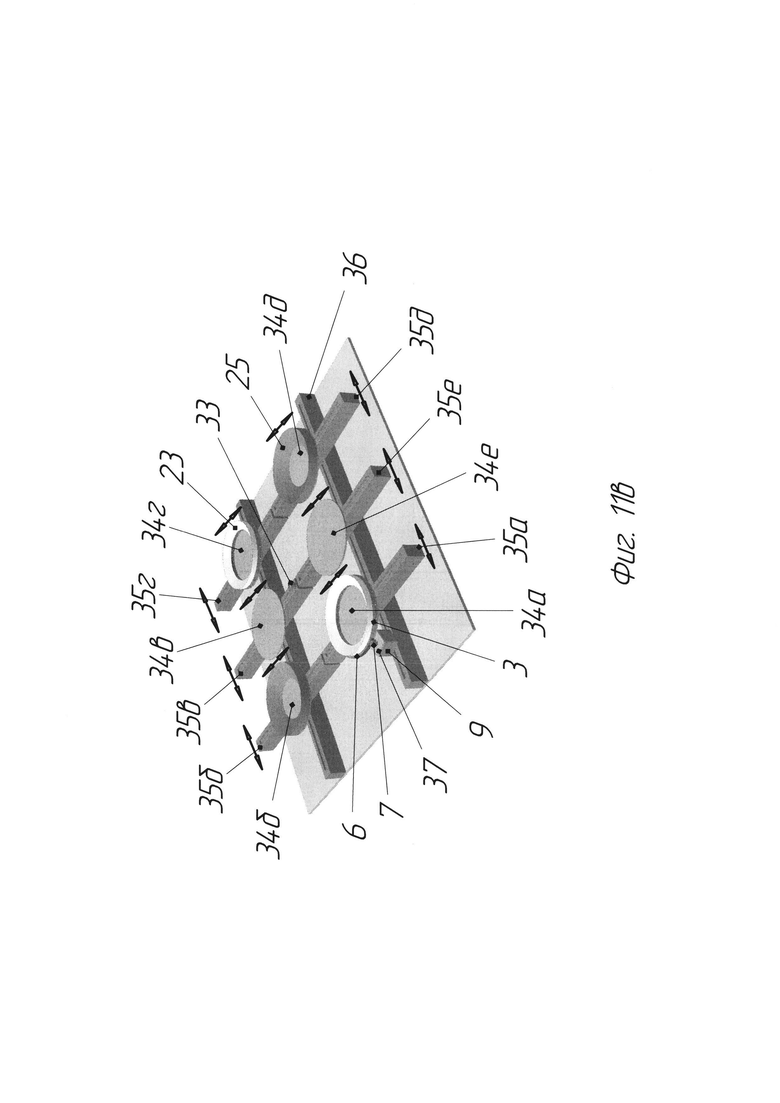
На фиг. 11а, 11б, 11в изображен вариант посадочной платформы с подвижными основаниями, на которых установлены ирисовые диафрагмы и могут быть установлены воронки, каждое подвижные основания имеет привод для перемещения.
На фиг. 11а посадочная платформа настроена на прием БПЛА с шестью опорами, расположенными по вершинам правильного шестиугольника.
На фиг. 11б посадочная платформа настроена на прием БПЛА с четырьмя опорами.
На фиг. 11в посадочная платформа настроена на прием БПЛА с шестью установленными в два ряда опорами.
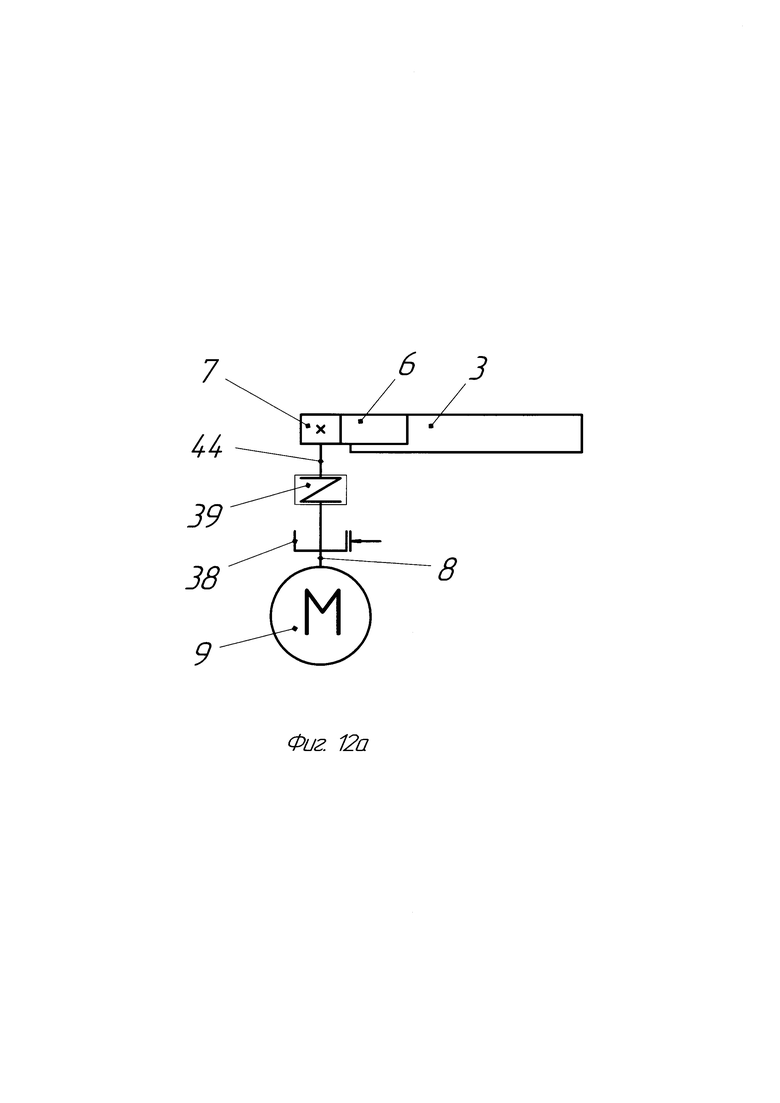
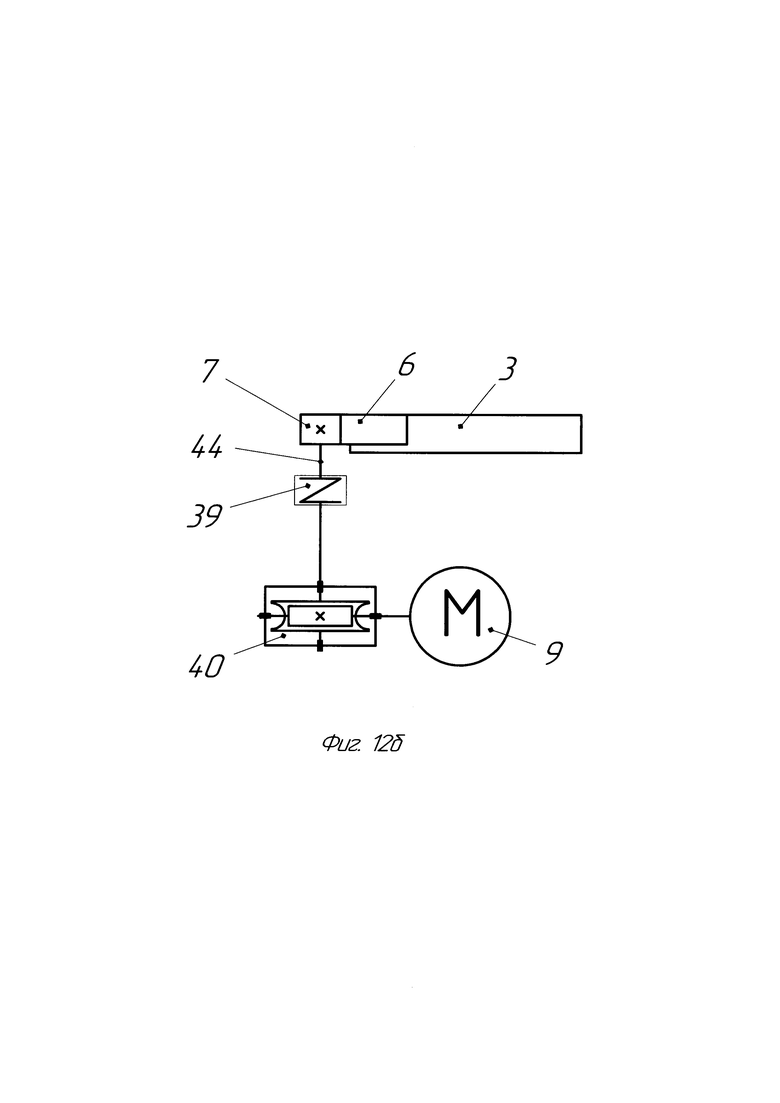
На фиг. 12а, 12б изображены варианты схем индивидуального привода закрывания/открывания диафрагмы.
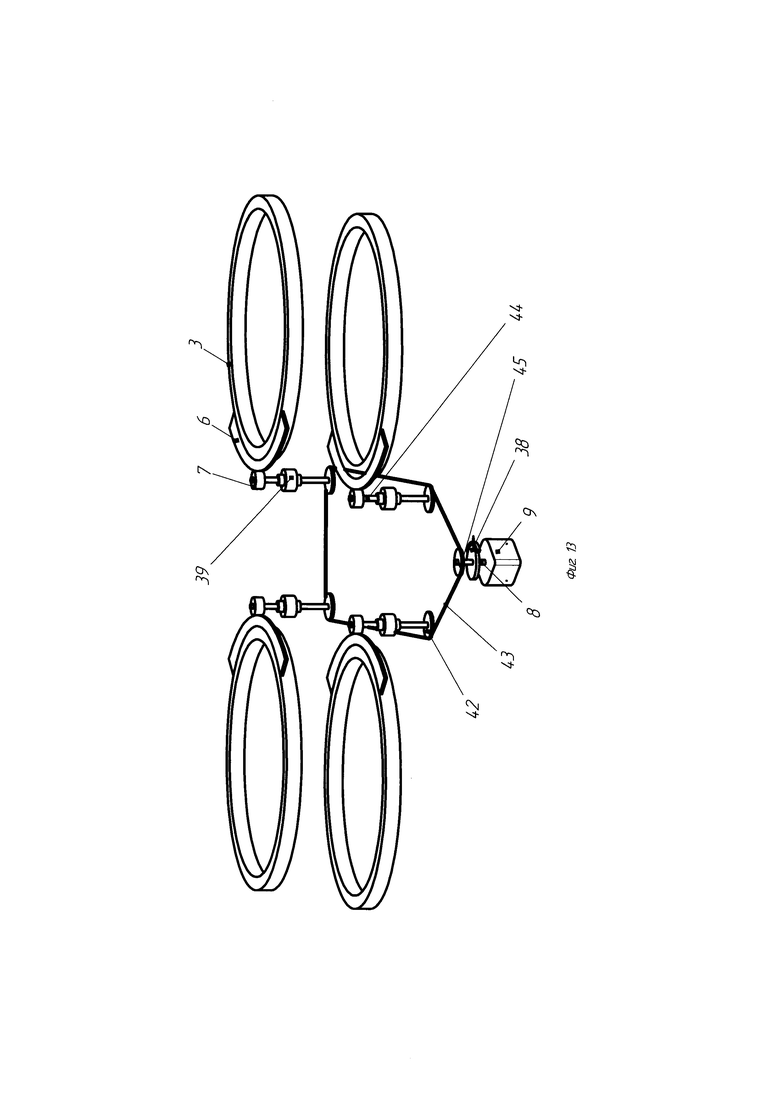
На фиг. 13 изображен вариант кинематической схемы привода закрывания/открывания диафрагм, в котором все ирисовые диафрагмы кинематический связаны между собой.
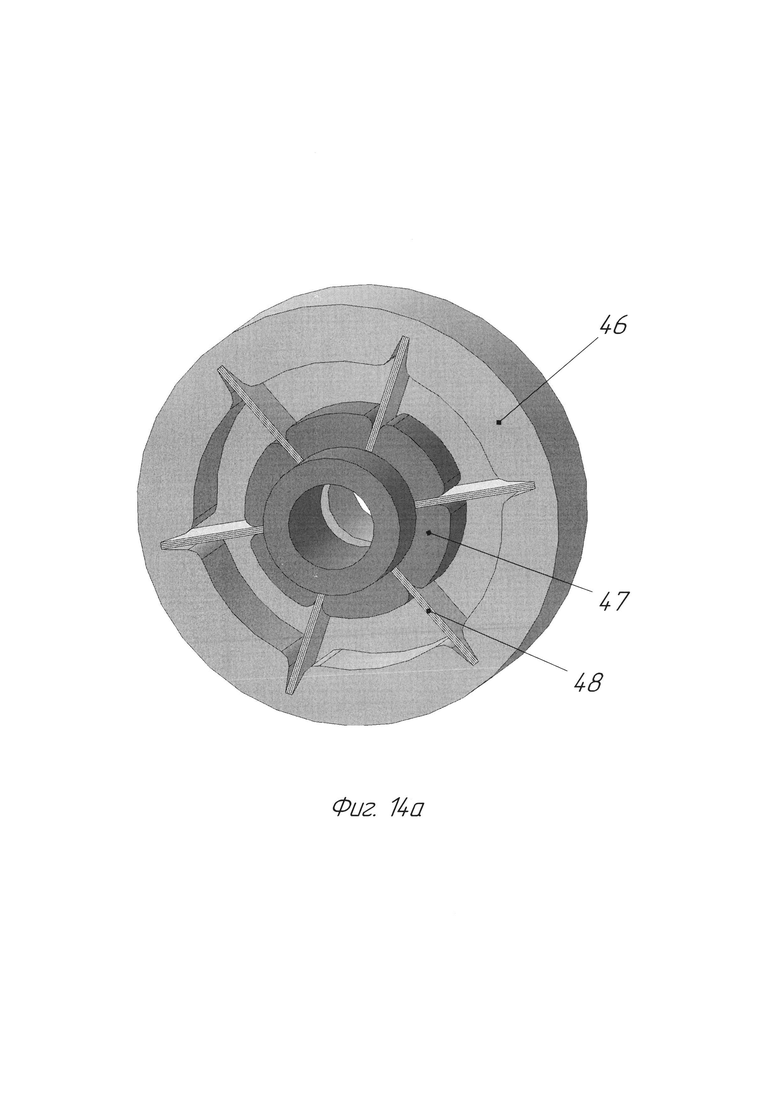
На фиг. 14а изображена упругая подвижная муфта.
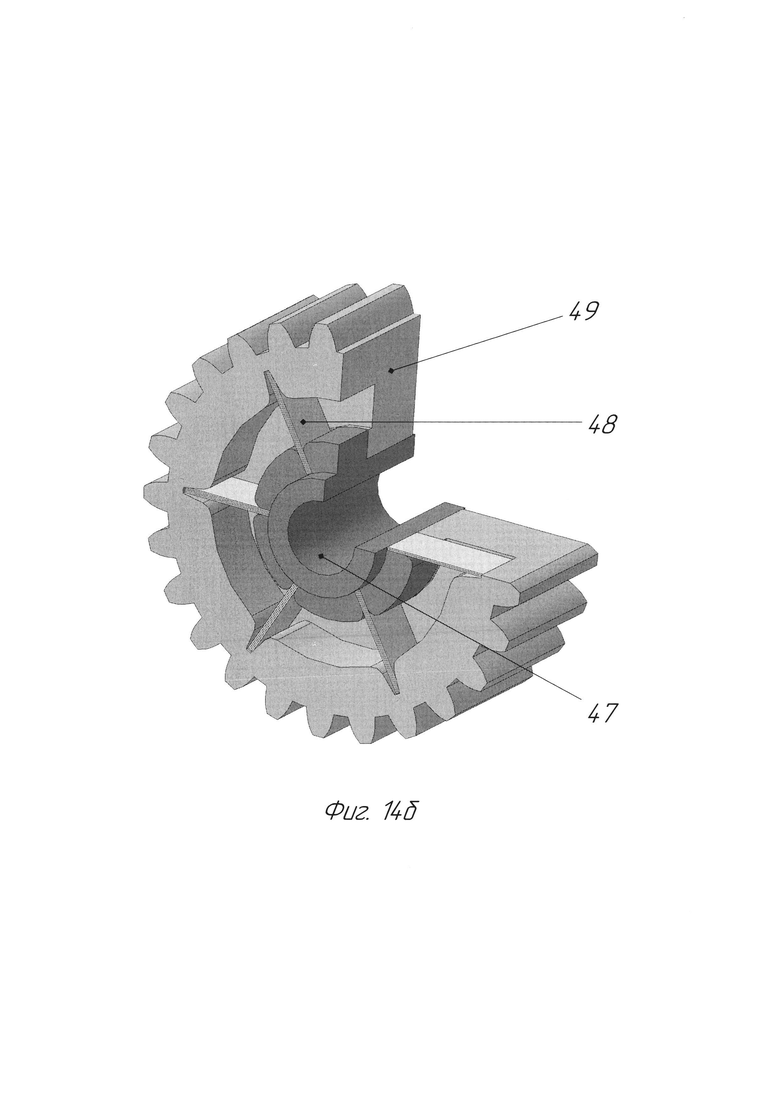
На фиг. 14б изображена упругая подвижная муфта, встроенная в шестерню.
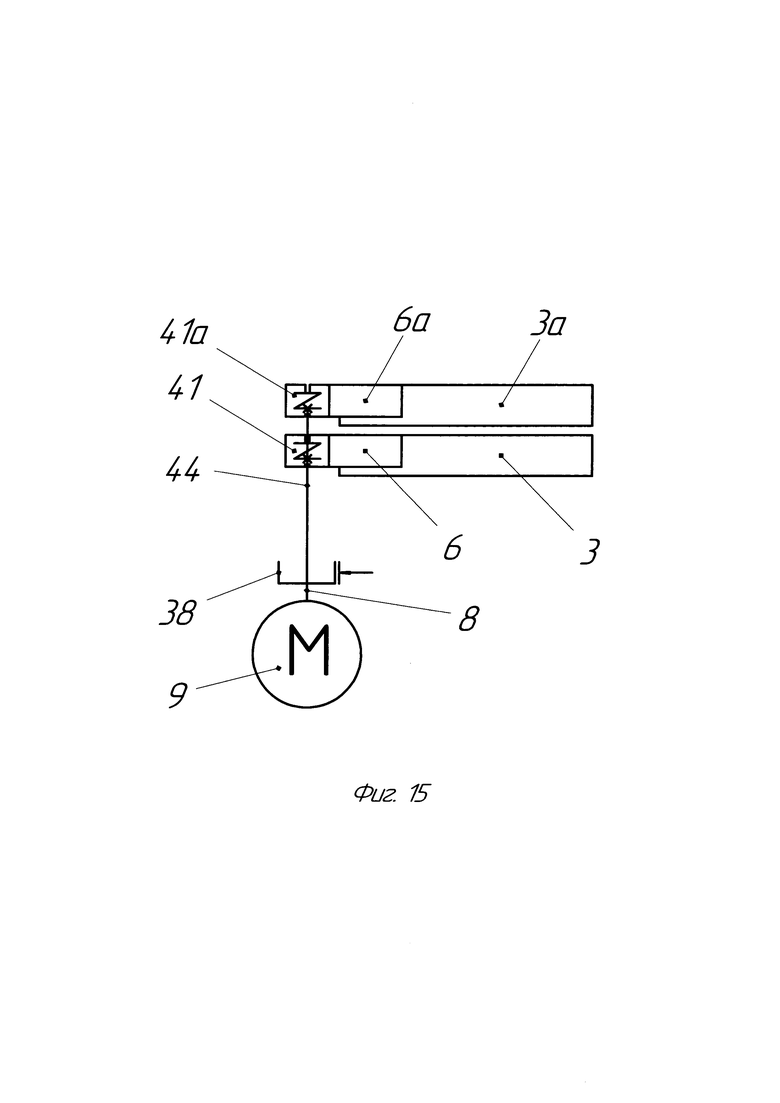
Фиг. 15 - изображен вариант схемы привода установленных соосно друг над другом ирисовых диафрагм.
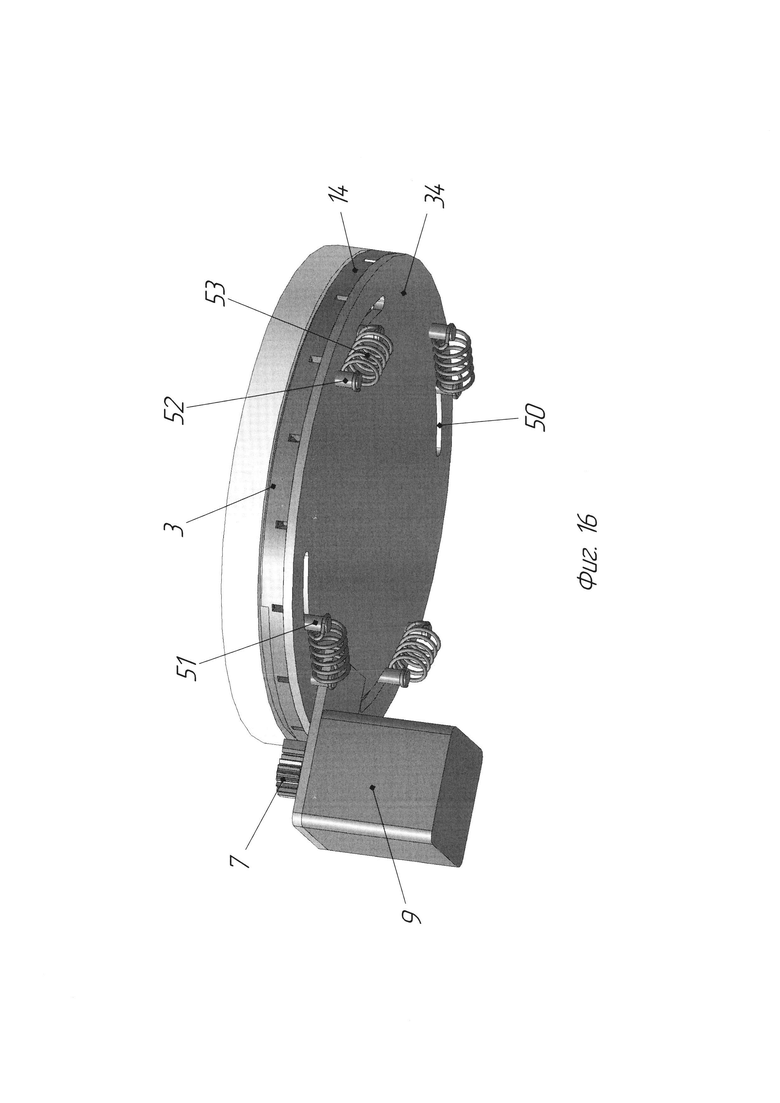
На фиг. 16 изображена установка ирисовой диафрагмы с возможностью упругого поворота относительно своей оси.
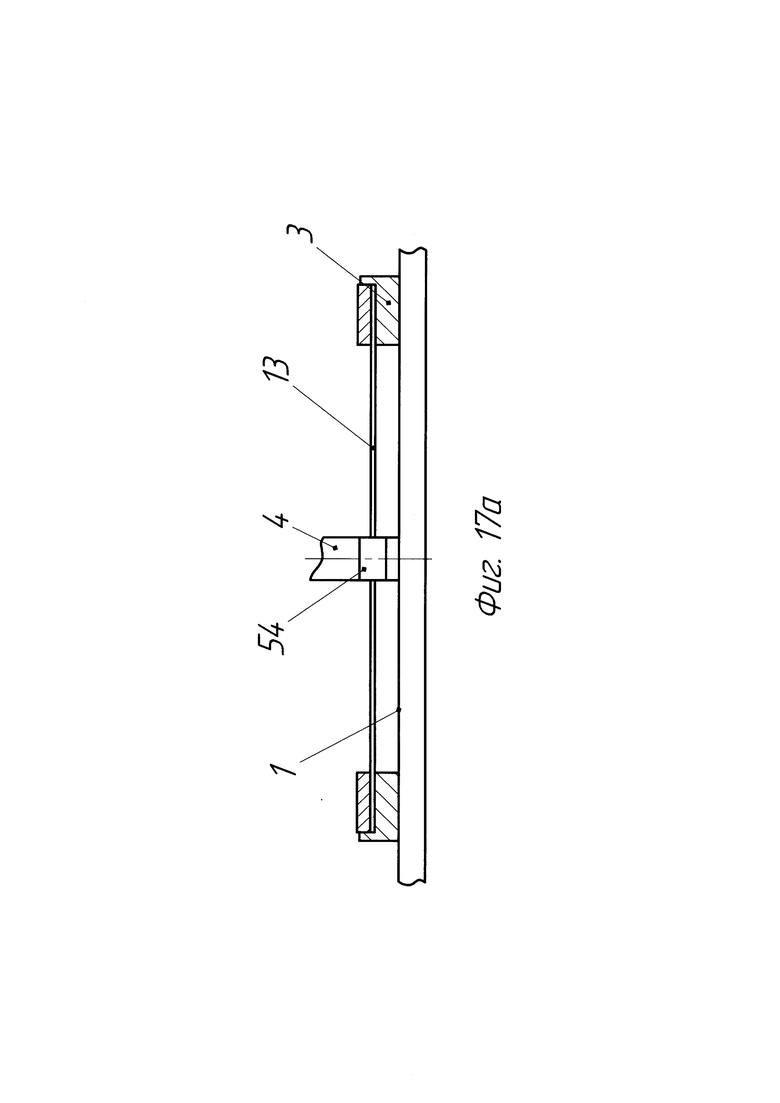
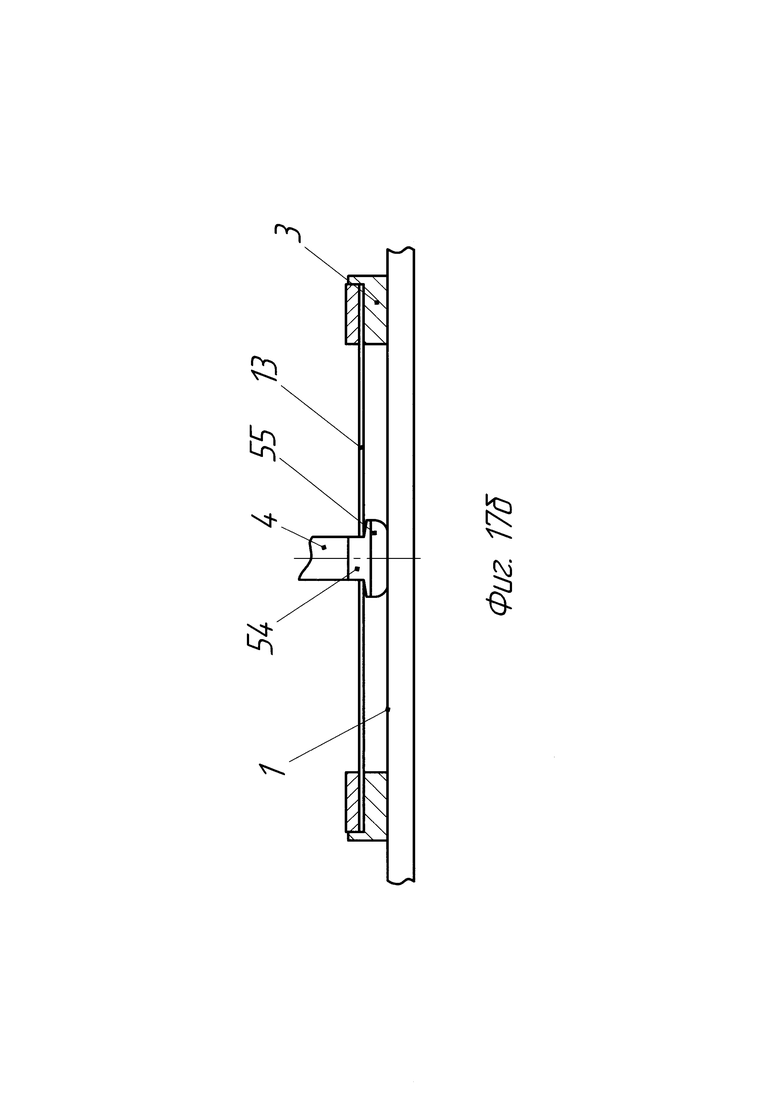
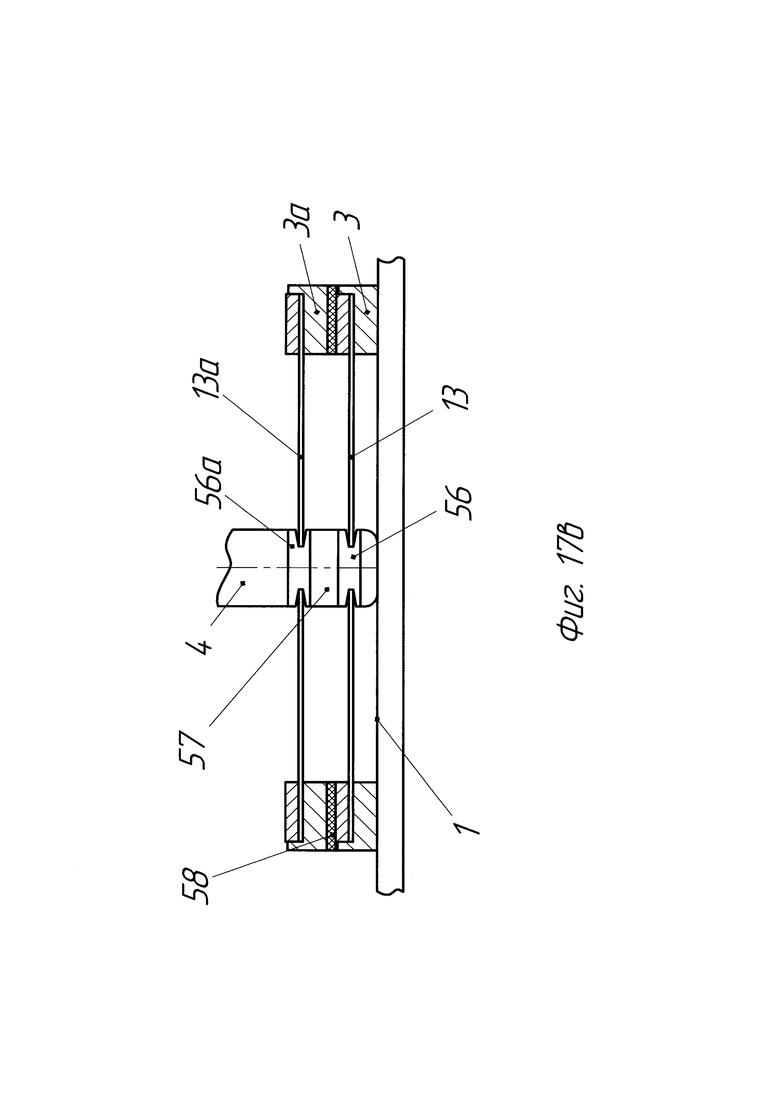
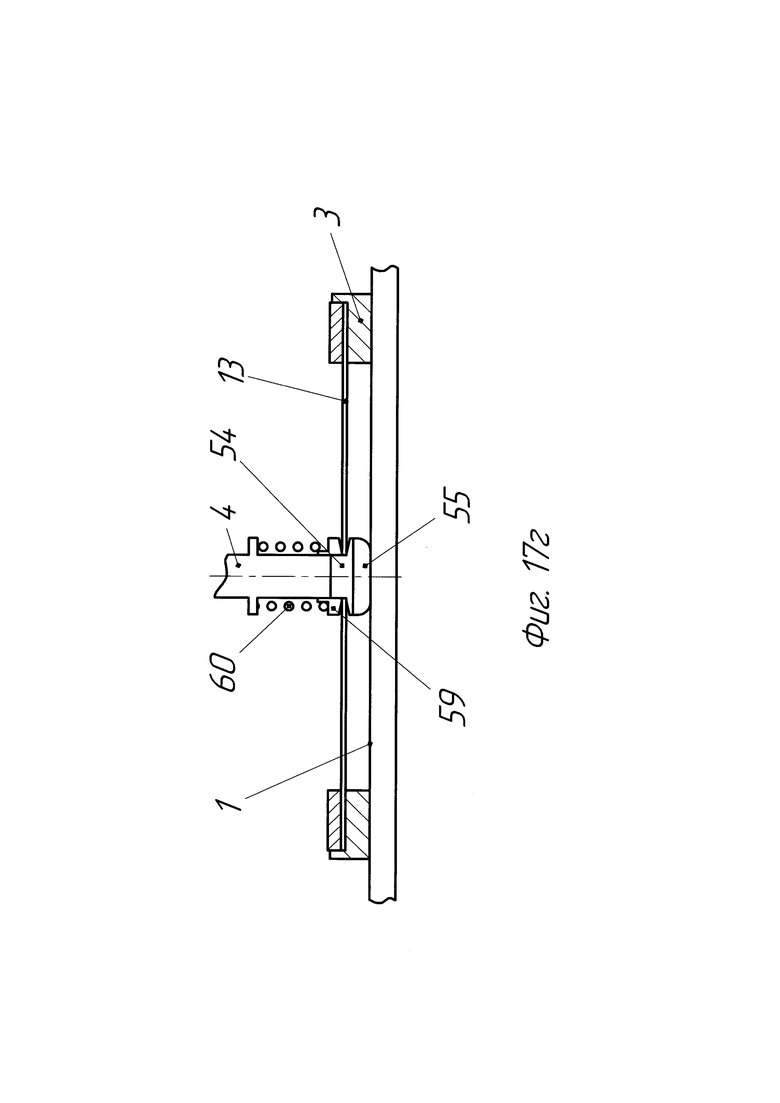
На фиг. 17а, 17б, 17в и 17г изображены варианты выполнения опор принимаемых БПЛА, содержащих элементы для удержания с помощью ирисовой диафрагмы и электрические контакты.
Посадочная платформа (фиг. 1а) содержит посадочную поверхность 1, на которой установлены электрические контакты 2 и устройство позиционирования в виде ирисовых диафрагм 3, которые расположены соосно с опорами 4 (фиг. 1б) принимаемого БПЛА 5. Количество ирисовых диафрагм должно быть не менее двух. На каждую ирисовую диафрагму 3 установлен зубчатый сектор 6, который соединен с приводом закрывания/открывания диафрагмы, состоящими из шестерни 7, установленного на вал 8 двигателя (мотор-редуктора) 9, который работают от драйвера (не показан). Посадочная платформа может также содержать датчики 10 углового положения зубчатого сектора 6 или драйвер (не показан) двигателя 9 может быть настроен на останов при повышении момента нагрузки.
Ирисовая диафрагма 3 (фиг. 2а и 2б) содержит кольцевую оправу 11 с концентрический расположенными отверстиями 12, лепестки 13 и коронку 14 с радиальными пазами 15. На лепестках 13 установлены осевые штифты 16, которые вставлены в концентрический расположенные отверстия 12 кольцевой оправы 11 и ведомые штифты 17, которые находятся в пазах 15 коронки 14. Кольцевая оправа 11 имеет поводок 18 для поворачивания его относительно коронки 14. Внутренние кромки 20 лепестков 13 образуют дуги центрального (диафрагменного) отверстия 19. Чем больше лепестков 13 содержит ирисовая диафрагма 3, тем ближе к кругу приближается центральное (диафрагменное) отверстие 19. В зависимости от углового расположения кольцевой оправы 11 относительно коронки 14 центральное отверстие 19 может иметь размер от внутреннего диаметра D кольцевой оправы 11 до минимального значения, которая определяется соотношениями размеров деталей ирисовой диафрагмы 3.
Посадочная платформа может иметь ирисовые диафрагмы 3 другой конструкции. При этом будет сохранена способность позиционирования БПЛА 5.
На фиг. 1б изображена посадочная платформа с приземлившимся и позиционированным БПЛА 5. Кольцевая оправа 11 ирисовых диафрагм 3 повернуты относительно коронки 14 и лепестки 13 уменьшили диаметр диафрагменного отверстия 19 до диаметра опор 4 БПЛА 5 и удерживают опоры 4 БПЛА 5 своими кромками 20. Поз. 21 обозначен корпус принимаемого БПЛА 5.
Выбор минимального количества ирисовых диафрагм 3 определяется тем, что две ирисовые диафрагмы 3 позволяют позиционировать БПЛА 5 с необходимой центровкой опор 4 относительно контактов 2.
С увеличением количества ирисовых диафрагм 3 снижется нагрузка на опоры 4 БПЛА 5 и лепестки 13 ирисовой диафрагмы 3 и это может позволить ускорить работу по позиционированию БПЛА 5. Максимальное количество ирисовых диафрагм 3 равно количеству опор 4 БПЛА 5 с максимально возможным количеством опор, принимаемым данной посадочной платформой.
На фиг. 3а и 3б изображена посадочная платформа с количеством ирисовых диафрагм 3, равным количеству опор 4 принимаемого БПЛА 5.
На фиг. 4а, 4б, 4в, 4г, 4д изображены варианты размещения ирисовых диафрагм 3 на посадочной поверхности 1 при различных количествах ирисовых диафрагм. Поз. 4а…4г схематический отмечены опоры принимаемого БПЛА 5 с идентификацией каждой опоры 4.
Если количество ирисовых диафрагм 3 на посадочной поверхности 1 составляет две штуки (фиг. 4а), они разнесены на противоположные стороны корпуса 21 принимаемого БПЛА 5 на расстояние расположения максимально удаленных опор 4а и 4г. Такое расположение ирисовых диафрагм 3 позволяет создавать пару сил разнесенных относительно центра тяжести БПЛА и разворачивать его с применением наименьшего усилия на опоры 4а и 4г и ирисовые диафрагмы 3. При параллельном переносе БПЛА усилия на опоры 4а и 4г также распределены равномерно.
Если количество ирисовых диафрагм 3 на посадочной поверхности 1 составляет три штуки (фиг. 4б), они разнесены равномерно по местам расположения опор 4а, 4в и 4д. Равномерное расположение ирисовых диафрагм 3 в данном случае обеспечивает равномерность нагрузки на опоры 4а, 4в, 4д и ирисовые диафрагмы 3.
Если количество ирисовых диафрагм 3 на посадочной поверхности 1 составляет четыре штуки (фиг. 4в), они установлены симметрично относительно двух максимально разнесенных опор 4е и 4в, то есть по местам расположения опор 4а, 4б, 4г, 4д., то есть каждая пара ирисовых диафрагм 3 разнесены на противоположные стороны корпуса 21 принимаемого БПЛА 5 и удалены друг от друга на расстояние расположения максимально удаленных опор 4а, 4г и 4б, 4д.
Если количество ирисовых диафрагм 3 на посадочной поверхности 1 составляет пять штук (фиг. 4г), они установлены по местам расположения всех опор, кроме одной. Например, по местам расположения опор 4а, 4б, 4в, 4г, 4д или аналогично.
Для других вариантов расположения опор 4 принимаемого БПЛА 5 возможно другие конфигурация расположения ирисовых диафрагм 3. При этом ирисовые диафрагмы 3 установлены с максимальным удалением друг от друга по разные стороны от корпуса и распределены равномерно по опорам 4 принимаемого БПЛА 5.
На фиг. 5а и 5б изображены посадочные платформы для БПЛА 5 вертикального взлета и посадки, в которых сверху ирисовых диафрагмам 3 установлены дополнительные ирисовые диафрагмы 3а (второй ярус).
Посадочная платформа фиг. 5а содержит минимальное количество - две ирисовые диафрагмы 3 (основные) и две дополнительные ирисовые диафрагмы 3а (второго яруса) и могут быть установлены дополнительные ирисовые диафрагмы третьего и т.д. ярусов. Дополнительные ирисовые диафрагмы 3а не отличаются от ирисовой диафрагмы 3 (основной)
Посадочная платформа фиг. 5б содержит ирисовые диафрагмы 3, количество которых равно количеству опор 4 принимаемого БПЛА 5. При этом на все ирисовые диафрагмы 3 установлены дополнительные ирисовые диафрагмы 3а второго яруса, и могут быть установлены дополнительные ирисовые диафрагмы третьего и т.д. ярусов. На каждую ирисовую диафрагму 3 и дополнительную ирисовую диафрагму 3а установлены зубчатые секторы 6 и 6а, которые соединены с приводом закрывания/открывания диафрагмы, состоящем из шестерни 7, 7а установленных на вал 8 двигателя (мотор-редуктора) 9, которые работают от своих драйверов (не показан). Посадочная платформа может также содержать датчики 10 углового положения зубчатого сектора 6, а драйвер (не показан) двигателя 9 может быть настроен на останов при повышении момента нагрузки.
На каждую ирисовую диафрагму 3 посадочных платформ согласно схеме 4а, 4б, 4в, 4г могут быть установлены сверху дополнительные ирисовые диафрагмы, образуя ярусы ирисовых диафрагм 3а и т.д.
Два или более яруса ирисовых диафрагм позволяют снизить нагрузку на лепестки 13 ирисовых диафрагм 3 и 3а и рассредоточить нагрузку на опору 4 БПЛА 5. В результате это позволяет повысить скорость позиционирования БПЛА 5 без риска перегрузок ирисовых диафрагм 3, 3а и опор 4 БПЛА 5. Кроме того, при условии выполнения по крайней мере лепестков 13 ирисовых диафрагм 3, 3а и т.д. из электропроводного материала возможно обеспечить два и более электрических контактов на опору 4 БПЛА 5.
На фиг. 6 приведена схема для расчета допустимого отклонения посадки БПЛА, при котором позиционирование будет успешным.
Приняты следующие обозначения:
А - расстояние двух соседних опор 4 принимаемого БПЛА 5;
d - диаметр опор 4 принимаемого БПЛА 5;
D - диаметр диафрагменного отверстия 19 ирисовой диафрагмы 3 при полностью открытой диафрагме.
D1 - наружный диаметр ирисовой диафрагмы 3.
Ирисовая диафрагма 3 способна произвести позиционирование БПЛА 5, если опоры 4 БПЛА 5 при приземлении попадут в полностью открытое диафрагменное отверстие 19 ирисовой диафрагмы 3. Следовательно, чем больше диаметр D диафрагменного отверстия 19 при максимально открытой диафрагме, тем больше допустимое отклонение посадки БПЛА 5, при котором позиционирование будет успешным. Однако, наружный диаметр D1 ирисовой диафрагмы 3 не может быть больше расстояния А двух соседних опор 4 принимаемого БПЛА 5.
Очевидно, максимально допустимое отклонение посадки принимаемого БПЛА 5 будет равно:
Х=(D-d)/2,
где X - максимально допустимое отклонение посадки принимаемого БПЛА 5 при посадке на ирисовую диафрагму 3.
Максимально допустимое отклонение посадки принимаемого БПЛА 5 может быть увеличено, если верхние поверхности дополнительных ирисовых диафрагм 3а верхнего яруса выполнены в виде воронок или на них установлены воронки с наружным диаметром, равным наружному диаметру дополнительной ирисовой диафрагмы 3а. При одноярусной установке ирисовых диафрагм 3 воронка устанавливается на имеющуюся ирисовую диафрагму 3.
В этом случае максимально допустимое отклонение посадки принимаемого БПЛА 5 будет равно:
X1=(D1-d)/2,
где X1 - максимально допустимое отклонение посадки принимаемого БПЛА 5 при посадке на воронку, установленную на ирисовую диафрагму 3.
Если учесть, что максимальное значение D1 равно расстоянию соседних опор 4 принимаемого БПЛА 5, максимально допустимое отклонение посадки принимаемого БПЛА 5 при посадке на воронку, установленную на ирисовую диафрагму 3 будет равно:
X1=(A-d)/2,
то есть такая же, как при посадке БПЛА на воронки.
Для успешного позиционирования БПЛА после посадки блок управления БПЛА 5 должен обеспечивать точность посадки не ниже указанных величин.
На фиг. 7а изображена ирисовая диафрагма 3, верхняя поверхность которой выполнена воронкой 22. Ирисовая диафрагма 3 содержит кольцевую оправу 11, верхняя поверхность которой выполнена в виде воронки 22. Наружный и внутренний диаметры кольцевой оправы 11 совпадают с наружным и внутренним диаметрами ирисовой диафрагмы 3. Угол наклона поверхности воронки 22 выполнена больше угла трения пары материалов кольцевой оправы 11 и опоры 4 принимаемого БПЛА 5.
На фиг. 7б изображена ирисовая диафрагма 3, на верхнюю поверхность которой установлена накладка 23, выполненная в виде воронки. Наружный и внутренний диаметры накладки 23 совпадают с наружным и внутренним диаметрами кольцевой оправы 11 ирисовой диафрагмы. Угол наклона поверхности воронки накладки 23 выполнен больше угла трения пары материалов накладки 23 и опоры 4 принимаемого БПЛА 5.
На фиг. 8а изображена посадочная платформа для БПЛА 5 вертикального взлета и посадки с двумя ирисовыми диафрагмами 3, верхняя поверхность которых выполнена воронкой 22 (или на них установлена накладная воронка 23, на фиг. не показана). На остальные места расположения опор 4 принимаемого БПЛА 5 установлены воронки 24 точно повторяющие внешнюю форму ирисовых диафрагм 3, верхняя поверхность которых выполнена воронкой 22 или на них установлена накладная воронка 23.
На фиг. 8б изображена посадочная платформа для БПЛА 5 вертикального взлета и посадки с двумя ирисовыми диафрагмами 3, верхняя поверхность которых выполнена воронкой 22 (или на них установлена накладная воронка 23, на фиг. не показана). На остальные места расположения опор 4 принимаемого БПЛА 5 установлены воронки 25, у которых наружный диаметр, высота и угол наклона поверхности воронки равны наружному диаметру, высоте и углу наклона поверхности воронки ирисовых диафрагм 3, верхняя поверхность которых выполнена воронкой 22 или на них установлена накладная воронка 23.
Таким образом, представленные на фиг. 8а и 8б посадочные платформы содержат комбинированное устройства позиционирования БПЛА, состоящие из воронки и ирисовой диафрагмы. Такое решение увеличивает допустимое отклонение ПБЛА при посадке до требования воронки и при этом устройство позиционирования имеет малую высоту и высокую скорость позиционирования.
На фиг. 9а, 9б представлена схема варианта исполнения посадочной платформы с двумя подвижными ирисовыми диафрагмами 3.
Посадочная платформа содержит две ирисовые диафрагмы 3, по крайней мере одна из них установлена на посадочной поверхности 1 с возможностью перемещения, что делает посадочную платформу универсальной, способной принимать БПЛА 5 с различным числом опор 4 и различными расстояниями между ними. На фиг. 9а и 9б перемещаются обе ирисовые диафрагмы 3.
Расстояние между ирисовыми диафрагмами 3 связано с расстоянием между ближайшими опорами 4 принимаемого БПЛА 5 следующими соотношениями:
В1=1,41×А
для принимаемого БПЛА 5 с четырьмя установленными по вершинам квадрата опорами 4;
В2=1,618×А;
Для БПЛА 5 с пятью размещенными по вершинам правильного пятиугольника опорами 4;
В3=2×А
для принимаемого БПЛА 5 с шестью размещенными по вершинам правильного шестигранника опорами 4.
Для принимаемых БПЛА 5 с другим количеством и размещением опор 4 расстояние между ирисовыми диафрагмами 3 могут рассчитываться исходя из конкретных геометрических соотношений.
Ирисовые диафрагмы 3 соединены с приводами для перемещения по посадочной поверхности 1, состоящем из натяжного 26 и приводного 27 шкивов, между которыми натянут зубчатый ремень 28. Зубчатый ремень 28 с обоих концов соединен с ирисовой диафрагмой 3. Приводной шкив 27 соединен с двигателем или мотор-редуктором 29.
Привод закрывания/открывания диафрагмы содержит двигатель 30, установленный на коронку 14 (не виден) ирисовой диафрагмы 3. На выходной вал двигателя 30 установлена шестерня 9, которая входит в зацепление с зубчатым сектором 16. Таким образом, привод закрывания/открывания диафрагмы установлен выше посадочной поверхности 1 и может двигаться вместе с ирисовой диафрагмой 3 по поверхности посадочной поверхности 1.
На фиг. 10а, 10б представлена схема варианта посадочной платформы с подвижными ирисовыми диафрагмами 3 и воронками 24 (или 25).
Данный вариант посадочной платформы может содержать:
- количество подвижных ирисовых диафрагм 3 от двух до количества опор 4 БПЛА 5 с максимально возможным количеством опор 4, принимаемых данной посадочной платформой.
- количество подвижных воронок 24 (или 25) от нуля до количества опор 4 БПЛА 5 с максимально возможным количеством опор 4, принимаемых данной посадочной платформой минус два;
- при этом общее количество подвижных воронок 24 (или 25) и подвижных ирисовых диафрагм 3 составляет не более количеству опор 4 БПЛА 5 с максимально возможным количеством опор 4, принимаемых данной посадочной платформой.
На фиг. 10а, 10б представлен схема варианта посадочной платформы, содержащий две подвижные ирисовые диафрагмы 3 и две подвижные воронки 24 (или 25). Данная посадочная платформа способна принять БПЛА 5 с количеством опор 4 три и более. Кроме того, конфигурация расположения опор 4 принимаемого БПЛА 5 может быть произвольной.
Привод для перемещения по посадочной поверхности 1 каждой подвижной ирисовой диафрагмы 3 и каждой подвижной воронки 24 (или 25) содержит три или более лебедок 31, которые соединены с ирисовой диафрагмой 3 или воронкой 24 (или 25) с помощью тросов 32.
Привод закрывания/открывания диафрагмы содержит двигатель 30, установленный на коронку 14 (не виден) ирисовой диафрагмы 3. На выходной вал двигателя 30 установлена шестерня 9, которая входит в зацепление с зубчатым сектором 6. Таким образом, привод закрывания/открывания диафрагмы установлен выше посадочной поверхности 1 и может двигаться вместе с ирисовой диафрагмой 3 по поверхности посадочной поверхности 1.
Посадочная платформа может также содержать не менее одного датчика 33 положения принимаемого БПЛА 5, который может быть установлен стационарно или подвижно. Данный датчик (или группа датчиков) необходим для определения отклонения БПЛА 5 от точки посадки в горизонтальной плоскости и определения угла рыскания БПЛА 5 относительно заданного направления при посадке. Результаты обработки информации с датчика положения могут быть использованы для корректировки местоположения ирисовых диафрагм 3 и воронок 24 (или 25) при посадке БПЛА 5, чтобы повысить надежность посадки.
В качестве датчика положения 33 может служить датчик оптического потока, набор фотоприемников, сонары, одна или несколько видеокамер и т.п.
В представленном на фиг. 10а и 10б вариантах в качестве датчика 33 положения использована видеокамера, определяющая положение БПЛА 5 по его изображению или по изображению, маркера установленного на него.
На фиг. 10а представлена схема варианта посадки БПЛА 5 с четырьмя опорами 4, расположенными по вершинам квадрата. Ирисовые диафрагмы 3 и воронки 24 установлены по вершинам квадрата со стороной А, равной расстояниям между ближайшими опорами 4 принимаемого БПЛА.
На фиг. 10б представлен варианта посадки БПЛА 5 с шестью опорами 4, расположенными по вершинам равностороннего шестигранника. Ирисовые диафрагмы 3 и воронки 24 (или 25) установлены по вершинам прямоугольника, образованного опорами 4а, 4в, 4г, 4е с расстоянием между опорами 4а и 4е; 4в и 4г равным расстоянию А между ближайшими опорами 4 принимаемого БПЛА 5, при этом расстояние между опорами 4а и 4в; 4г и 4е равны и соответствует:
В=1,73×А.
Для другого количества и конфигурации опор 4 принимаемого БПЛА 5 местоположения ирисовых диафрагм 3 и воронок 24 (или 25) могут быть вычислены исходя из соответствующей геометрии расположения опор 4.
Выполнение ирисовых диафрагм 3 и воронок 24 (или 25) подвижными позволяет получить универсальное посадочную платформу, у которой местоположение устройств позиционирования настраиваются перед приемом БПЛА под конкретную конфигурацию и количество опор принимаемого БПЛА. Кроме того, такая посадочная платформа позволяет корректировать местоположение ирисовых диафрагм 3 и воронок 24 (или 25) в процессе посадки в активном режиме, что также повышает надежность удачной посадки БПЛА 5.
На фиг. 11а, 11б, 11в изображен вариант выполнения посадочной платформы, содержащей подвижные основания 34а, 34б, 34в, 34г, 34д, 34е. Каждое подвижное основание 34а, 34б, 34в, 34г, 34д, 34е соединено с соответствующим приводом перемещения, выполненным в виде линейного модуля 35а, 35б, 35в, 35г, 35д, 35е. Линейные модули 35а…35е в свою очередь установлены на линейных модули 36. Таким образом, каждое подвижное основание 34а…34е имеет возможность перемещения по двум координатам (указано стрелками), и ограничено только столкновением их между собой. Это позволяет принимать БПЛА 5 с любой конфигурацией расположения опор 4. Индексы номеров 34а…34е соответствуют индексам 4а…4е опор принимаемого БПЛА.
Возможно применение других видов приводов, способных перемещать подвижные основания 34а…34е с заданной точностью и динамикой.
Посадочная платформа содержит количество подвижных оснований 34а…34е, равное количеству опор 4 БПЛА 5 с максимально возможным количеством опор 4, принимаемых данной посадочной платформой. Не менее двух подвижных оснований 34а…34е содержит ирисовые диафрагмы 3. Остальные подвижные основания 34а…34е могут быть свободными или содержать воронки 24 (или 25).
Привод закрывания/открывания ирисовой диафрагмы 3 содержит шестерню 7, установленную на вал 8 двигателя (мотор-редукторов) 9, которые работают от драйвера (не показан). Также возможно наличие датчиков 10 (см. фиг. 1а) углового положения зубчатого сектора 16 (см. фиг. 1а) или драйвер двигателя 9 может быть настроен на останов при повышении момента нагрузки. Двигатель 9 установлен на кронштейн 37, установленный на подвижном основании 34.
Посадочная платформа может также содержать не менее одного датчика 33 положения принимаемого БПЛА 5, например, видеокамеры, которые могут быть установлены на стационарные или подвижные опоры.
На фиг. 11а посадочная платформа настроена на прием БПЛА 5 с шестью опорами 4, расположенным по вершинам правильного шестигранника.
На фиг. 11б посадочная платформа настроена на прием БПЛА 5 с четырьмя опорами 4, расположенным по вершинам квадрата.
В данном варианте для приема БПЛА 5 требуется четыре подвижные основания 34, по количеству опор 4 принимаемого БПЛА 5. Не менее двух подвижных оснований 34 должны содержать ирисовые диафрагмы 3, остальные два подвижных основания 34 могут содержать ирисовые диафрагмы 3 или воронки 24 (или 25) или быть пустыми. Не используемые для приземления БПЛА 5 подвижные основания 34 выводятся из зоны размещения опор 4 принимаемого БПЛА 5 и не принимают участия в приеме и позиционировании БПЛА 5. Подвижные основания 34а, 34б, 34г и 34д образуют квадрат со стороной, равной расстоянию между опорами 4 принимаемого БПЛА, подвижные основания 34в и 34е выведены из зоны размещения опор 4 принимаемого БПЛА 5. При этом подвижные основания 34в и 34е не содержат ирисовых диафрагм 3 или воронок 24 (или 25).
На фиг. 11в посадочная платформа настроена на прием БПЛА 5 с шестью опорами 4, установленным в два ряда.
Использование подвижных оснований 34 позволяет получить универсальное посадочную платформу, у которой подвижные основания 34 устанавливаются заранее перед приемом БПЛА под конкретную конфигурацию и количество опор 4 принимаемого БПЛА 5. Такая посадочная платформа также позволяет корректировать местоположение подвижных основании 34 во время посадки в активном режиме, что также повышает надежность удачной посадки БПЛА 5.
В представленных выше вариантах посадочных платформ для приема БПЛА 5 вертикального взлета и посадки каждая ирисовая диафрагма 3 имеет собственный привод закрывания/открывания диафрагмы. В этом случае каждая ирисовая диафрагма 3 работает независимо от других, количество двигателей 9 равно количеству ирисовых диафрагм 3. Ирисовые диафрагмы 3 могут быть кинематически связаны между собой и/или соединены с единым приводом закрывания/открывания диафрагм.
На фиг. 12а и 12б изображены варианты схем индивидуального привода закрывания/открывания диафрагмы.
Привод фиг. 12а содержит двигатель (мотор-редуктор) 9, тормоз 38, упругую подвижную муфту 39 и шестерню 7, которая входит в зацепление с зубчатым сектором 6, установленным на ирисовую диафрагму 3. В качестве двигателя 9 может быть использован шаговый двигатель или серводвигатель, которые обладают свойством торможения. После двигателя 9 может быть установлен червячный редуктор 40 (фиг. 12б). Шаговый двигатель, серводвигатель и червячный редуктор являются самотормозящимся механизмами и применение их исключает необходимость применения тормоза 38.
Применение тормоза 38 или самотормозящего механизма совместно с упругой подвижной муфтой 39 позволяет распределить нагрузки на ирисовые механизмы 3, а также обеспечить надежное удержание опор 4 БПЛА 5 за счет упругого поджатая лепестков 3 к опорам 4.
На фиг. 13 изображен вариант кинематической схемы привода закрывания/открывания диафрагм, в котором все ирисовые диафрагмы 3 кинематически связаны между собой.
Каждая ирисовая диафрагма содержит зубчатый сектор 6. Каждый зубчатый сектор 6 соединен с шестерней 7, которая установлена на своем валу 44 и через упругую подвижную муфту 39 соединен со шкивом 42. Все шкивы 42 соединены приводным ремнем 43 с приводным шкивом 45, который через тормоз 38 соединен с двигателем 9. В качестве двигателя 9 может быть использован шаговый или серводвигатель, которые обладают свойством торможения. После двигателя 9 может быть установлен червячный редуктор. Шаговый двигатель, серводвигатель и червячный редуктор 40 являются самотормозящимся механизмами и применение их исключает необходимость применения тормоза 38.
На фиг. 14а изображен вариант конструкции упругой подвижной муфта 39. Упругая подвижная муфта 39 содержит установленные соосно охватывающую 46 и охватываемую 47 полумуфты, которые связаны между собой пакетом 48 пластинчатых пружин. Упругая подвижная муфта 39 может быть встроена в шестерню. При этом венец 49 шестерни является одновременно охватывающей полумуфтой (фиг. 14б).
На фиг. 15 представлен вариант кинематической схемы привода закрывания/открывания основной и дополнительной ирисовых диафрагм, установленных ярусами одна над другой. Упругие подвижные муфты 39 встроены в шестерни 7 и установлены на общий вал 44.
Возможно применение упругих подвижных муфт 39 другой конструкции, обеспечивающих накопление упругой энергии для поджатая лепестков 13 ирисовых диафрагм 3 в закрытом состоянии.
На фиг. 16 изображена установка ирисовой диафрагмы 3 с возможностью упругого поворота относительно своей оси. На подвижном основании 34 (или посадочной поверхности 1, на фиг. не показано) выполнены концентрический пазы 50. На коронку 14 ирисовой диафрагмы 3 установлены кронштейны 51, которые выходят через концентрические пазы 50. На подвижном основании 34 (или посадочной поверхности 1, на фиг. не показано) установлены кронштейны 52, который соединены с кронштейнами 51, установленными на коронке 14 посредством пружин 53. Пружины 53 подтягивают кронштейны 51 и 52 друг к другу, и кронштейн 51, установленный на коронке 14 ирисовой диафрагмы 3, касается конца сектора 50. Пружины 53 имеют при этом заданный натяг. Это позволяет осуществлять упругий поворот ирисовой диафрагмы 3 относительно своей оси после того, как лепестки 13 ирисовой диафрагму 3 коснутся опор 4 БПЛА 5, то есть выполнять функцию упругих подвижных муфт и создавать необходимый натяг лепестков 13 на опоры 4.
Ирисовая диафрагма 3 или по крайней мере, лепестки 13 ирисовой диафрагмы 3 могут быть выполнены из электропроводного материала. К каждой ирисовой диафрагме 3 или к лепесткам 13 подведены провода для подачи напряжения (не показано). Это позволяет использовать лепестки 13 ирисовой диафрагмы 3 в качестве электрического контакта для соединения с контактами, расположенными на опорах 4 принимаемого БПЛА 5. Контакты на опорах принимаемого БПЛА 5 должны быть выполнены в зоне касания лепестков 13 ирисовой диафрагмы 3. В случае, если ирисовая диафрагма 3 выполнена полностью из электропроводного материала, следует предпринять меры по электрической изоляции между другими, установленными на посадочной платформе, ирисовыми диафрагмами 3.
На фиг. 17а, 17б, 17в и 17г изображены варианты выполнения опор 4 БПЛА 5, содержащих элементы для удержания с помощью ирисовой диафрагмы 3, которые могут служить одновременно электрическими контактами.
На фиг. 17а изображена цилиндрическая опора 4 БПЛА 5. Зона контакта 54 опоры 4 с лепестками 13 ирисовой диафрагмы 3 может быть выполнена из электропроводного материала и соединена с электрической схемой БПЛА 5 (не показано).
На фиг. 17б изображена цилиндрическая опора 4 БПЛА. 5 со шляпкой 55. Такая конструкция опор 4 позволяет удерживать их от вертикальных перемещений, т.к. движение вниз ограничено посадочной поверхностью 1 (или подвижным основанием 34, на фиг. не показано), а вверх - лепестками 13 ирисовой диафрагмы 3. Зона 54 контакта опоры 4 и шляпки 55 с лепестками 13 ирисовой диафрагмы 3 выполнены из электропроводного материала и соединена с электрической схемой БПЛА 5 (не показано).
На фиг. 17в изображен вариант опоры 4 БПЛА 5 для позиционирования, удержания и создания электрического контаката с ирисовой диафрагмой 3 и дополнительной ирисовой диафрагмой 3а, выполенными из электропроводного материала.
Опора 4 может содержать несколько контактов 56, 56а с кольцевыми проточками по числу ярусов ирисовых диафрагм 3, 3а и т.п. установленных в зоне контакта с лепестками 13 и 13б ирисовых диафрагм 3 и дополнительных ирисовых диафрагм 3а. Электрические контакты 56 и 56а с кольцевыми проточками электрический изолированы друг от друга изолятором 57. Каждый электрический контакт 56, 56а и т.п. с кольцевыми проточками соединен с электрической схемой БПЛА 5 (не показано). Данный вариант позволяет создать несколько контактов на опору 4. Форма электрических контактов 56 и 56а с кольцевыми проточками позволяет удерживать опоры 4 от вертикальных перемещений. Если ирисовые диафрагмы 3, 3а и т.п. выполнены из электропроводного материала, они изолированы между собой изолирующей прокладкой 58.
На фиг. 17г изображена опора 4 БПЛА 5 со шляпкой 55 и ответной частью 59, которые образуют кольцевую проточку и поджаты между собой с помощью пружиной 60. Это усиливает возможности удержания БПЛА 5.
Зона 54 контакта опоры 4 и грибка 55 с лепестками 13 ирисовой диафрагмой 3 выполнены из электропроводного материала и соединены с электрической схемой БПЛА (не показано).
В указанных на фиг. 17а, 17б, 17в, 17г каждая ирисовая диафрагма 3, 3а и т.п. или лепестки 13, 13а и т.п. соединены с системой управления или зарядным устройством (не показано).
Кроме указанных узлов посадочная платформа содержит систему управления, блок питания и зарядки аккумуляторов принимаемых БПЛА, драйверы серводвигателей, шаговых двигателей или электродвигателей, входящих в состав посадочной платформы, посадочный маркер или источник излучения для ориентации БПЛА для точной посадки, которые не представлены в графическом материале и вышеприведенном описании.
Система управления может хранить данные о конфигурации и количестве опор принимаемых БПЛА.
Представленные механические и электрические узлы и детали посадочной платформы могут быть заменены механическими, электрическими, гидравлическими или пневматическими деталями и узлами аналогичного назначения, обеспечивающими аналогичный результат.
Работа посадочной платформы.
Работа ирисовой диафрагмы.
В открытом состоянии ирисовой диафрагмы (фиг. 2а, 2б) все лепестки 13 максимально раздвинуты, диаметр диафрагменного отверстия 19 совпадает с внутренним диаметром кольцевой оправы 11, поводок 18 находится в крайнем положении. Для закрывания диафрагмы необходимо поворачивать поводок 18 против часовой стрелки по фиг. 2а. При этом кольцевая оправа 11 поворачиваясь увлекает осевые штифты 16 и лепестки 3. Центральные части лепестков 13 начинают сходиться в центр ирисовой диафрагмы, образуя внутренними кромками 20 диафрагменное отверстие 19, которое тем ближе к кругу, чем больше число лепестков 3. Независимо от диаметра диафрагменного отверстия 19 оно будет симметрично центральной оси ирисовой диафрагмы. Если в открытое диафрагменное отверстие 19 ввести опору 4 БПЛА 5 и закрывать диафрагму, лепестки 13 своими внутренними кромками 20 будут толкать опору 4 к центру диафрагменного отверстия 19. В момент замыкания всеми лепестками 13 опоры 4 (цилиндрического тела), она будет находиться в центре ирисовой диафрагмы.
Таким образом, оказавшаяся в любой точке внутри диафрагменного отверстия 19 опора 4 БПЛА 5 будет перемещена к центру ирисовой диафрагмы 3 путем толкания его кромками 20 лепестков 3, то есть будет позиционирована. Причем точка позиционирования находится на оси ирисовой диафрагмы и не зависит от диаметра опоры (цилиндрического тела). Лепестки 3 ирисовой диафрагмы обхватывают опору 4 БПЛА 5 и надежно удерживают ее от перемещения.
Подготовка к посадке БПЛА на посадочную платформу.
Для приема БПЛА 5 на посадочную платформу ирисовые диафрагмы 3 и 3а должны быть открыты.
Система управления посадочной платформы опрашивает показания датчиков 10 углового положения зубчатых секторов 6 ирисовых диафрагм 3. Если ирисовые диафрагмы 3 закрыты, то подает команду на открывание. Если посадочная платформа не имеет датчиков 10 углового положения зубчатых секторов 6 ирисовых диафрагм 3, система управления подает команду на открывание ирисовых диафрагм 3 и останавливает двигатели приводов по возрастанию момента сопротивления.
Подготовка к посадке вариантов посадочной платформы фиг. 1а, 5а.
Данные посадочные платформы принимают БПЛА 5 с заданным расстоянием между опор 4.
Посадочные платформы фиг. 1а, 5а могут принять БПЛА 5 с количеством опор 4 от четырех и выше. Расстояние между ирисовыми диафрагмами 3 должны иметь следующие величины:
В1=1,41×А;
для принимаемого БПЛА 5 с четырьмя установленными по вершинам квадрата опорами 4 (фиг. 2а):
В2=1,618×А;
для БПЛА 5 с пятью размещенными по вершинам правильного пятиугольника опорами 4:
В3=2×А
Для принимаемых БПЛА 5 с другим количеством и размещением опор 4 расстояние между ирисовыми диафрагмами 3 могут рассчитываться исходя из конкретных геометрических соотношений.
Подготовка к посадке вариантов посадочной платформы фиг. 3а, 5б, 8а, 8б
Данные посадочные платформы принимают БПЛА 5 с фиксированной конфигурацией и расстоянием между опор 4.
В зависимости от количества ирисовых диафрагм 3 и воронок 24 (или 25), а также от их расположения, посадочные платформы как на фиг. 3а, 5б, 8а, 8б могут принять БПЛА 5 с количеством опор 4 от трех и выше, при условии совпадения местоположения ирисовых диафрагм 3 и воронок 24 (или 25) с местоположением опор 4 принимаемого БПЛА 5.
Подготовка к посадке вариантов посадочной платформы фиг. 9а, 10а, 11а
До посадки БПЛА 5 на посадочную платформу фиг. 9а, 10а и 11а на систему управления должна поступить информация о типе принимаемого БПЛА 5. Система управления обращается к хранимым данным о конфигурации и количестве опор 4 принимаемого БПЛА 5. Посадочная платформа в соответствии с этими данными выставляет местоположение ирисовых диафрагм 3 и воронок 24 (или 25) для варианта исполнения фиг. 9а, 10а или подвижных оснований 34 для варианта исполнения 11а под конкретное расположение опор 4 принимаемого БПЛА 5.
По получению системой управления команды на подготовку на прием БПЛА 5:
- Система управления посадочной платформы исполнения фиг. 9а настраивает расстояние между ирисовыми диафрагмами 3 при помощи привода перемещения по посадочной поверхности 1. Двигатели 29 с помощью шкива 27 двигают зубчатый ремень 28, который связан с ирисовыми диафрагмами 3 до достижения заданного расстояния между ирисовыми диафрагмами 3.
- Система управления посадочной платформы исполнения фиг. 10а настраивает местоположение ирисовых диафрагмам 3 и воронок 24 (или 25) при помощи привода перемещения по посадочной поверхности 1 путем синхронной работы лебедок 31, которые задают длины тросов 32 и определяют тем самым положение каждой ирисовой диафрагм 3 и воронки 24 (или 25) по посадочной поверхности 1.
- Система управления посадочной платформы исполнения фиг. 11а настраивает взаимное расположение подвижных оснований 34 линейными модулями 35 и 36, которые определяют положение каждого подвижного основания 34. Если количество опор 4 принимаемого БПЛА 5 меньше количества подвижных оснований 34, неиспользуемые при посадке подвижные основания 34 отводятся в сторону от зоны посадки и не принимают участия в процессе приема БПЛА 5 (см. фиг. 12б). Первыми выводятся пустые подвижные основания 34, далее - подвижные основания 34 с воронками 24 (или 25).
Таким образом, посадочные платформы фиг. 9а, 10а и 11а при каждом приеме БПЛА 5 будут иметь различное, соответствующее конфигурации опор 4 принимаемого БПЛА 5, расположение ирисовых диафрагм 3, воронок 24 (или 25) или подвижных оснований 34, что позволяет принимать БПЛА с различной конфигурацией опор.
Посадка БПЛА на посадочную платформу.
Посадка. БПЛА 5 подлетает к посадочной платформе ориентируясь по спутниковой навигации или показаниям собственной инерционной навигации. Далее производится определение точного места посадки БПЛА и его посадка, ориентируясь по установленной на БПЛА 3 видеокамере по изображению посадочной площадки и/или графического маркера, изображенного на посадочной поверхности 1 и/или источника излучения, установленного на посадочной платформе. Точность посадки БПЛА 5 определяется методом определения места посадки, динамическими характеристиками БПЛА 5, условиями освещенности, метеорологическими условиями посадки, особенно порывистым ветром и видимостью. Посадка БПЛА 5 пройдет успешно, если все опоры 4 БПЛА 5 войдут в соответствующие диафрагменные отверстия 19 ирисовых диафрагм 3 или попадут в соответствующие воронки 24 (или 25).
Посадочные платформы исполнении фиг. 1а, 3а, 5а, 5б, 8а, 8б, 9а при посадке БПЛА 5 ведут себя пассивно, не совершают никаких действии. Точность посадки БПЛА 5 полностью зависит от возможностей принимаемого БПЛА 5 и погодных условий.
Посадочные платформы исполнении фиг. 10а, 11а могут вести себя как пассивно, так и активно.
При пассивном поведении, когда посадочная платформа не совершает никаких действий точность посадки БПЛА 5 полностью зависит от возможностей принимаемого БПЛА 5 и погодных условий.
Активное поведение посадочных площадок исполнении фиг. 10а, 11а заключается в том, что во время посадки БПЛА 5 датчик 33 положения БПЛА 5 определяет местоположение в горизонтальной плоскости и угол рыскания (разворота) БПЛА 5. Система управления получает данные с датчиков положения 33 БПЛА 5 и рассчитывает ожидаемое местоположение посадки каждой опоры 4 БПЛА 5. Приводы горизонтальных перемещений каждой подвижной ирисовой диафрагмы 3, каждой воронки 24 (или 25) в варианте исполнения фиг. 10а или каждой подвижной опоры 34 в варианте исполнения фиг. 11а перемещает их на ожидаемую позицию. Таким образом, в момент касания посадочной поверхности 1 каждая опора 4 БПЛА 5 оказывается в диафрагменном отверстии 19 ирисовой диафрагмы 3 или внутри воронки 24 (или 25) ближе к оси ирисовых диафрагм 3 или воронок 24 (или 25), чем если бы посадка производилась в пассивном режиме работы посадочной платформы.
Активное поведение посадочной площадки в автоматическом режиме особенно эффективно в последний момент посадки, когда у БПЛА 5 снижается запас маневренности. Механическая система перемещения ирисовых диафрагм 3, воронок 24 (или 25) и подвижных оснований 34 в этот момент имеет более быструю реакцию, особенно на возвратно-поступательные движения.
Повышение точности посадки увеличивает надежность посадки и время позиционирования, т.к. сокращает путь перемещения опор 4 к заданной точке позиционирования.
Позиционирование БПЛА 5 в момент и после посадки.
Посадочная платформа, содержащая воронки 24 (или 25) будет производить первичное позиционирование БПЛА 5 во время посадки, если опоры 4 БПЛА 5 коснутся поверхностей воронок 24 (или 25). Опоры 4, коснувшиеся воронок 24 (или 25) скатываются по ним к центрам воронок 24 (или 25) и попадают на посадочную поверхность 1. Опоры 4 БПЛА 5, коснувшиеся ирисовой диафрагмы 3, верхние поверхности которых выполнены воронками 22 или если на них установлены накладные воронки 23, скатываются по ним внутрь диафрагменных отверстий 19 ирисовых диафрагм 3 на посадочную поверхность 1.
После посадки БПЛА 5 посадочная платформа производит позиционирование принятого БПЛА 5. Для этого производится закрытие ирисовых диафрагм 3 до полного замыкания опор 4 кромками 20 лепестков 13 ирисовых диафрагм 3.
По поступлению информации о посадке БПЛА 5 на посадочную платформу система управления дает команду на закрытие диафрагм 3. Работа привода закрывания диафрагм. Тормоз 38 (см. схему фиг. 12а) отпускает вал 8 двигателя 9, двигатель 9 вращает поворотную упругую муфту 39, вращение от поворотной упругой муфты 39 передается на вал 44 и далее на шестерню 7, которая вращает зубчатый сектор 6, установленный на поводке 18 ирисовой диафрагмы 3. Ирисовая диафрагма 3 закрывает диафрагменное отверстие 19, кромки 20 лепестков 13 толкают опору 4 БПЛА 5 к центру ирисовой диафрагмы 3. Момент окончания позиционирования может быть определен по датчику 10 углового положения зубчатого сектора 6 или по возрастанию усилия сопротивления вращения. Охватываемая 46 и охватывающая 47 полумуфты поворотной упругой муфты 39 поворачиваются друг относительно друга, напрягая пластинчатые пружины 48 (фиг. 14а). После включения тормоза 38 и отключения двигателя 9 поворотная упругая муфта 39 сохраняет заданный момент вращения и опоры 4 БПЛА 5 остаются поджатыми внутренними кромками 20 лепестков 3, что обеспечивает надежное удержание БПЛА 5 на посадочной платформе.
Функцию тормоза могут исполнять самотормозящиеся механизмы, например, червячный редуктор 40 (фиг 12б), или шаговый двигатель, или сервомотор.
Упругая поворотная муфта 39 может быть встроена в шестерню 41 (фиг. 14б). В этом случае накопление энергии осуществляется в шестерне 41. Такое решение особенно удобно при вращении ирисовых диафрагм 3 и дополнительных ирисовых диафрагм 3а (фиг. 14в) от одного вала.
Установка ирисовых диафрагм 3 с возможностью упругого поворота относительно своей оси (фиг. 16) также позволяет накопить энергию и удерживать натяг лепестков 13 ирисовых диафрагм 3 на опорах 4 БПЛА 5. После полного контакта кромок 20 ирисовых диафрагм 3 опор 4 БПЛА 5 дальнейший поворот шестерни 7 приводит к повороту всей ирисовой диафрагмы 3 и натяжению пружин 53. После включения тормоза 38 и отключения двигателя 9 напряжение в пружинах 53 сохраняется и держит натяг лепестков 13 на опору 4.
В случае, когда ирисовые диафрагмы 3 кинематически связаны между собой и работают от единого привода поворотные упругие муфты 39 установлены на линии каждой ирисовой диафрагмы 3. Это позволяет закрывать каждую ирисовую диафрагму 3 и эффективно зажимать каждую опору 4.
При активном поведение посадочных платформ исполнении фиг. 10а, 11а во время приземления БПЛА 5 местоположение ирисовых диафрагм 3, воронок 24 (или 25) или подвижных оснований 34 после посадки может быть неопределенным (различным). Если предстоят какие-либо манипуляции с БПЛА 5, которые требуют точного местоположения БПЛА 3 приводы горизонтального перемещения ирисовых диафрагм 3, воронок 24 (или 25) или подвижных оснований 34 приводят их в заданное положение.
Удержание БПЛА на посадочной платформа.
На фиг. 17а, 17б, 17в, 17г представлены различные варианты исполнения опор 4 принимаемого БПЛА 5.
После посадки БПЛА 5 (фиг. 17а) ирисовые диафрагмы 3 производят позиционирование БПЛА 5 и обжатие лепестками 13 опор 4. При этом ирисовая диафрагма 3 способна удержать опору 4 от возможных горизонтальных перемещений. Однако ирисовые диафрагмы 3 не могут достаточно надежно удержать гладкую опору 4 от вертикальных перемещений. БПЛА 5 с такими опорами может приниматься и удерживаться на посадочной платформе стационарного типа.
При посадке БПЛА 5 содержащем опоры 4 со шляпками 55 (фиг. 17б), несколько контактов 56, 56а с кольцевыми проточками (фиг. 17в) и опор 4 со шляпкой 55 и подпружиненной ответной частью 59 (фиг. 17г) ирисовые диафрагмы 3 производят позиционирование БПЛА 5 и обжатие лепестками 13 опор 4. Ирисовая диафрагма 3 удерживает опору 4 от горизонтальных перемещений и способна удержать от вертикальных перемещений, т.к. движение вниз ограничено посадочной поверхностью 1 или подвижным основанием 34, а вверх - лепестками 13 ирисовой диафрагмы 3, которые фиксируются в кольцевой канавке контактов 56, 56а. БПЛА 5 с такими опорами 4 могут приниматься и удерживаться на посадочной платформе как стационарного типа, так и на подвижных объектах.
Подача напряжения на БПЛА.
По крайней мере, лепестки 13 ирисовых диафрагм 3 выполнены из электропроводного материала и к ним присоединены провода подачи напряжения от пульта управления посадочной платформой. Обжатие опор 4 БПЛА 5 лепестками 13 ирисовых диафрагм 3 позволяет создать надежный множественный контакт. Поджатие лепестков 13 с помощью поворотных упругих муфт 39 обеспечивает надежность контакта в условиях вибрации, возникающих как в стационарных условиях, так и при работе на подвижных объектах. Все это вместе позволяет обеспечить надежное электрическое соединение с установленным на посадочную площадку 1 БПЛА 5. Подача напряжения на БПЛА 5 производится от пульта управления посадочной платформой.
Взлет БПЛА с посадочной платформы.
Для осуществления взлета БПЛА 5 с посадочной платформы система управления прекращает подачу напряжения на контакты опор 4 БПЛА 5 и открывает ирисовые диафрагмы 3.
Таким образом, применение качестве устройства позиционирования БПЛА ирисовых диафрагм, комбинирование их воронками, многоярусное расположение ирисовых диафрагм, позволяют создать быстродействующую посадочную платформу для БПЛА вертикального взлета и посадки с надежным удержанием БПЛА и пригодным как для стационарных, так и для подвижных объектов.
Выполнение ирисовых диафрагм и воронок подвижными, соединенными с приводами перемещения позволяет создать универсальную посадочную платформу для различных конфигураций опор принимаемых БПЛА и обеспечить в активном режиме точное приземление принимаемого БПЛА.
Выполнение по крайней мере лепестков ирисовых диафрагм из электропроводного материала и дополнительное обжатие опор лепестками за счет поджатая упругой подвижной муфтой позволяет обеспечить надежное электрическое соединение с расположенным на посадочной платформе БПЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Посадочная платформа для беспилотного летательного аппарата | 2019 |
|
RU2710887C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2023 |
|
RU2821204C1 |
| Посадочная площадка для многовинтового БПЛА вертикального взлета и посадки (Варианты) | 2021 |
|
RU2770506C1 |
| Способ приземления БПЛА на посадочную платформу | 2020 |
|
RU2739636C1 |
| ПОСАДОЧНАЯ ПЛАТФОРМА ДЛЯ БПЛА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2020 |
|
RU2746538C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2024 |
|
RU2830732C1 |
| Корабельный динамический аэропричал для мультикоптеров | 2023 |
|
RU2828127C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| УСТРОЙСТВО ПАРКОВКИ И ЗАРЯДКИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (БПЛА) | 2019 |
|
RU2723197C1 |
| Способ приземления многовинтового БПЛА вертикального взлета и посадки и устройства для его реализации | 2021 |
|
RU2780255C1 |
Изобретение относится к конструкции посадочной платформы для беспилотного летательного аппарата (далее - БПЛА) вертикального взлета и посадки и может применяться при разработке автоматических станций зарядки и обслуживания БПЛА. Посадочная платформа БПЛА вертикального взлета и посадки содержит посадочную поверхность, электрические контакты и устройство позиционирования БПЛА. Устройство позиционирования выполнено в виде ирисовых диафрагм, соединенных с приводом закрывания/открывания. Устройство позиционирования может быть выполнено в виде ирисовых диафрагм, соединенных с приводом закрывания/открывания, и воронок, причем общее количество ирисовых диафрагм и воронок составляет не более максимального количества опор БПЛА. Обеспечивается повышение точности позиционирования БПЛА на посадочной платформе. 2 н. и 16 з.п. ф-лы, 36 ил.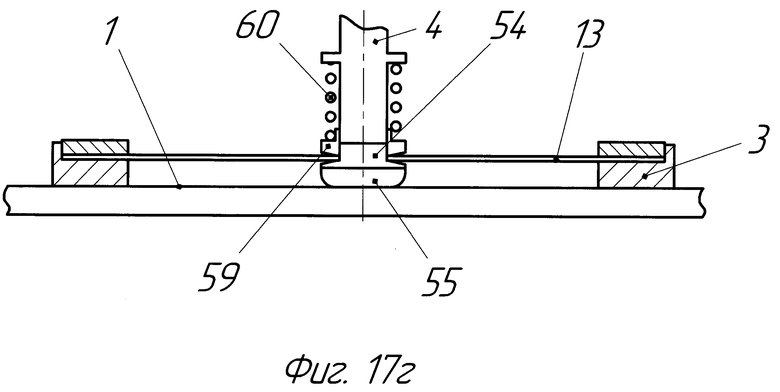
1. Посадочная платформа БПЛА вертикального взлета и посадки, содержащая посадочную поверхность, электрические контакты и устройство позиционирования БПЛА путем воздействия на его опоры, отличающаяся тем, что устройство позиционирования выполнено в виде ирисовых диафрагм, соединенных с приводом закрывания/открывания.
2. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1, отличающаяся тем, что содержит не менее двух ирисовых диафрагм.
3. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1, отличающаяся тем, что на ирисовые диафрагмы могут быть установлены дополнительные ирисовые диафрагмы.
4. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1, отличающаяся тем, что верхние поверхности ирисовых диафрагм выполнены в виде воронок.
5. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1, отличающаяся тем, что на верхние поверхности ирисовых диафрагм установлены воронки.
6. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1, отличающаяся тем, что каждая ирисовая диафрагма имеет собственный привод закрывания/открывания диафрагмы.
7. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1, отличающаяся тем, что ирисовые диафрагмы кинематически связаны между собой и/или соединены с единым приводом закрывания/открывания диафрагм.
8. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1, отличающаяся тем, что привод/приводы закрывания/открывания диафрагм ирисовых диафрагм содержат тормоз.
9. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1, отличающаяся тем, что привод/приводы закрывания/открывания диафрагм ирисовых диафрагм содержат самотормозящийся механизм.
10. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1, отличающаяся тем, что каждое звено кинематической схемы привода закрывания/открывания диафрагм содержит упругую подвижную муфту.
11. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1, отличающаяся тем, что каждая ирисовая диафрагма установлена с возможностью упругого поворота относительно своей оси.
12. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1, отличающаяся тем, что, по крайней мере, лепестки ирисовой диафрагмы выполнены из электропроводного материала.
13. Посадочная платформа БПЛА вертикального взлета и посадки, содержащая посадочную поверхность, электрические контакты и устройство позиционирования БПЛА путем воздействия на его опоры, отличающаяся тем, что устройство позиционирования выполнено в виде ирисовых диафрагм, соединенных с приводом закрывания/открывания, и воронок, причем общее количество ирисовых диафрагм и воронок составляет не более максимального количества опор БПЛА.
14. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 13, отличающаяся тем, что ирисовые диафрагмы и воронки выполнены подвижными.
15. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 13, отличающаяся тем, что ирисовые диафрагмы и воронки соединены с приводами для перемещения по посадочной поверхности.
16. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 13, отличающаяся тем, что ирисовые диафрагмы и воронки могут быть установлены на подвижные основания, каждое подвижное основание соединено с соответствующим приводом для перемещения.
17. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 13, отличающаяся тем, что общее количество подвижных оснований равно максимальному количеству опор БПЛА, принимаемых данной посадочной платформой.
18. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 13, отличающаяся тем, что содержит не менее одного датчика положения принимаемого БПЛА.
| WO 2018182577 A1, 04.10.2018 | |||
| US 9387940 B2, 12.07.2016 | |||
| Способ получения промежуточного соединения L-глюфосината и L-глюфосината | 2019 |
|
RU2799336C2 |
| CN 107108029 A, 29.08.2017 | |||
| US 20180074522 A1, 15.03.2018 | |||
| БАЗОВАЯ СТАНЦИЯ ДЛЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2670368C1 |

