Изобретение относится к области разработки систем наведения ракет и может быть использовано в комплексах ПТУР и ЗУР.
Известен способ модуляции релейных сигналов управления вращающейся по углу крена ракетой, выбранный в качестве прототипа (Кузовков Н.Т. Системы стабилизации летательных аппаратов (баллистических и зенитных ракет). М.: Высшая школа, 1976, с.269), в котором формируют трехпозиционные опорные периодические по углу крена ракеты модулирующие сигналы, сдвинутые относительно друг друга на угол π/2, перемножают релейные сигналы управления в каналах тангажа и рыскания и соответствующие трехпозиционные опорные периодические по углу крена ракеты модулирующие сигналы, суммируют результаты перемножения в каналах тангажа и рыскания.
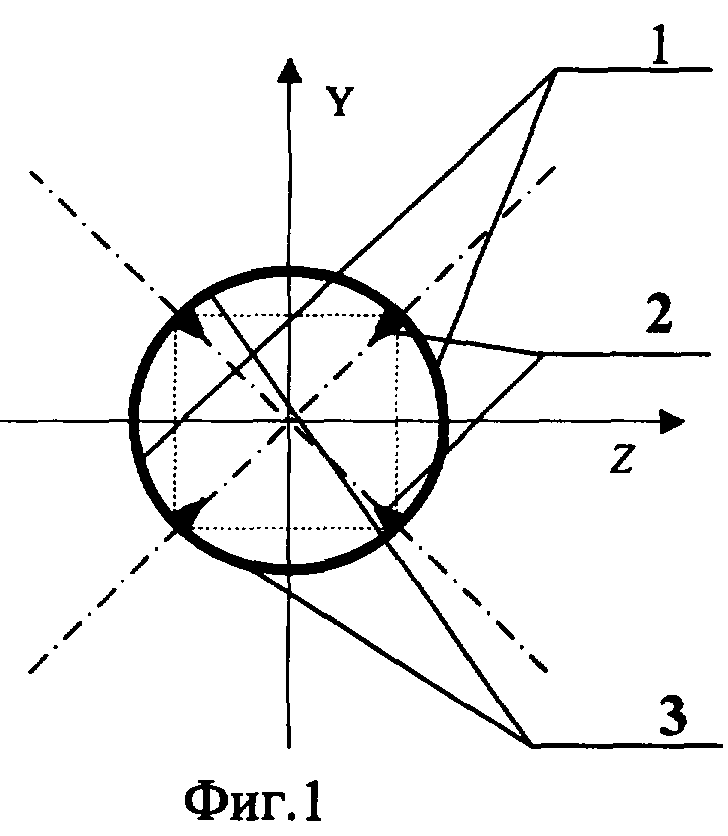
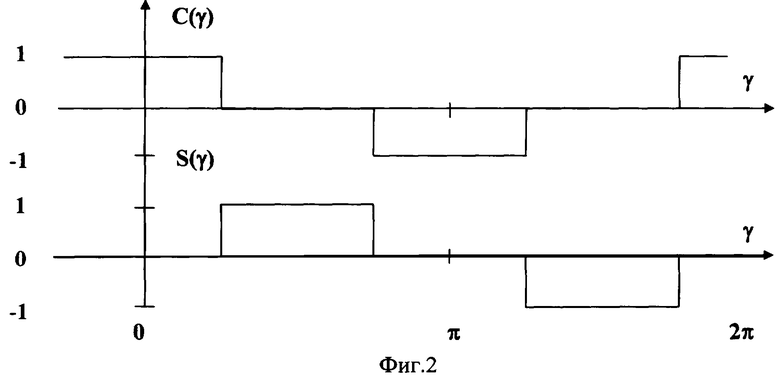
Устройство, реализующее этот способ, выбранное в качестве прототипа (Кузовков Н.Т. Системы стабилизации летательных аппаратов (баллистических и зенитных ракет). М.: Высшая школа, 1976, с.269, рис.7.32), включает гироскопический датчик трехпозиционных опорных периодических по углу крена ракеты модулирующих сигналов, содержащий стабилизированный при помощи гироскопа крена коллектор, состоящий из 4-х изолированных друг от друга проводящих секторов, каждому из которых соответствует угол π/2: двух вертикально расположенных секторов, соответствующих управлению по каналу тангажа, и двух горизонтально расположенных секторов, соответствующих управлению по каналу рыскания (фиг.1). Таким образом, секторы управления по каналам тангажа и рыскания симметричны и составляют (π/2)×(π/2). Токосъемники, вращающиеся относительно коллектора вместе с ракетой, периодически контактируют с изолированными друг от друга проводящими секторами коллектора, что позволяет сформировать трехпозиционные опорные периодические по углу крена ракеты модулирующие сигналы (фиг.2).
Недостатком изложенного способа и устройства для его осуществления является равное (симметричное) распределение секторов управления между каналами тангажа и рыскания (по 50% на канал), что приводит к нерациональному использованию имеющейся располагаемой перегрузки планера в более ответственном (нагруженном весовым возмущением) канале тангажа. Это повышает вероятность столкновения ракеты с подстилающей поверхностью в случае ее непосредственной близости (1,0-1,5 м) к линии визирования цели, особенно на участке переходного процесса (на начальном участке наведения). Указанный недостаток усиливается при управлении ракетами с дефицитом располагаемой перегрузки, поскольку в канале тангажа (в вертикальной плоскости) ракета должна развивать ускорение, компенсирующее кинематическое ускорение от силы тяжести. Под располагаемой перегрузкой ракеты здесь понимается наибольшая перегрузка (ускорение) ракеты, которую она может развить при максимальном отклонении рулевых органов (Дмитриевский А.А. Внешняя баллистика. - М.: Машиностроение, 1979, с.126).
Задачей предлагаемого изобретения является рациональное использование имеющейся располагаемой перегрузки планера в более ответственном (нагруженном весовым возмущением) канале тангажа и, как следствие, повышение точности наведения вращающихся по углу крена ракет с релейными приводами рулевых органов.
Для решения поставленной задачи предлагается способ модуляции релейных сигналов управления вращающейся по углу крена ракетой, в котором формируют трехпозиционные опорные периодические по углу крена ракеты модулирующие сигналы, сдвинутые относительно друг друга на угол π/2, перемножают релейные сигналы управления в каналах тангажа и рыскания и соответствующие трехпозиционные опорные периодические по углу крена ракеты модулирующие сигналы, суммируют результаты перемножения в каналах тангажа и рыскания, причем релейные сигналы управления в канале тангажа умножают на модулирующие сигналы с шириной импульсов, равной 2·π/3, а релейные сигналы управления в канале рыскания умножают на модулирующие сигналы с шириной импульсов, равной π/3.
Устройство, реализующее предлагаемый способ, включает гироскопический датчик трехпозиционных опорных периодических по углу крена ракеты модулирующих сигналов, содержащий стабилизированный при помощи гироскопа крена коллектор, состоящий из 4-х изолированных друг от друга проводящих секторов: двух вертикально расположенных секторов, соответствующих управлению по каналу тангажа, и двух горизонтально расположенных секторов, соответствующих управлению по каналу рыскания, причем вертикально расположенные секторы коллектора, соответствующие управлению по каналу тангажа, имеют угловой размер, больший, чем горизонтально расположенные секторы коллектора, соответствующие управлению по каналу рыскания, а именно: вертикально расположенные секторы коллектора имеют угловой размер 2·π/3, а горизонтально расположенные секторы коллектора имеют угловой размер π/3.
При этом соответственно увеличиваются на π/6 секторы управления, в которых рулевые органы отрабатывают команды, поступающие по каналу тангажа, причем в расширенных секторах рулевые органы вертикального и горизонтального каналов одновременно отрабатывают команды, поступающие по каналу тангажа.
Необходимые графические материалы представлены на фиг.1-5.
На фиг.1 изображена схема коллектора устройства, выбранного в качестве прототипа, где представлены вертикально расположенные секторы 1, соответствующие управлению по каналу тангажа, изолирующие элементы 2 и горизонтально расположенные секторы 3, соответствующие управлению по каналу рыскания. Каждому из секторов соответствует угол π/2, вследствие чего трехпозиционные опорные периодические по углу крена ракеты модулирующие сигналы, сдвинутые относительно друг друга на угол π/2, имеют ширину импульсов, равную π/2, что представлено на фиг.2.
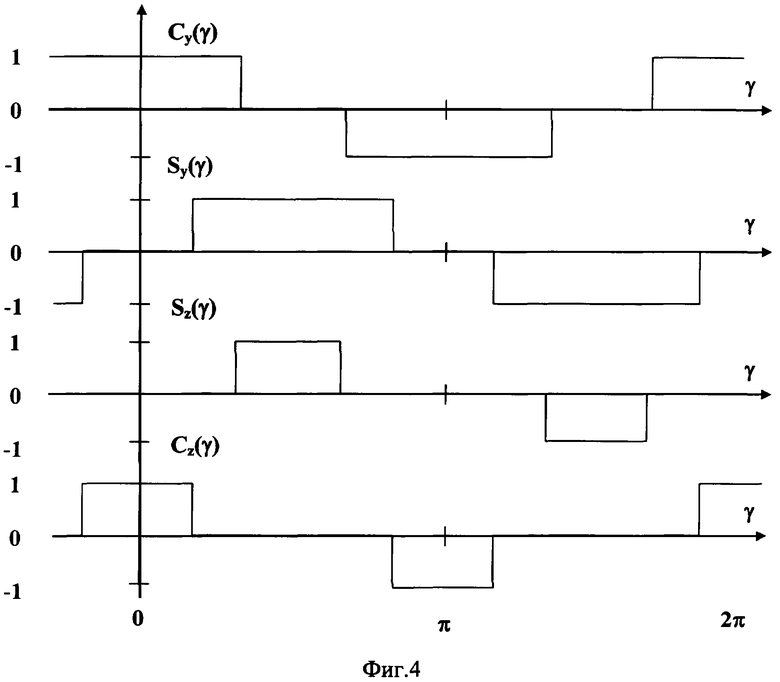
Схема коллектора предлагаемого устройства поясняется на фиг.3, где представлены вертикально расположенные секторы 1 с угловыми размерами 2·π/3, соответствующие управлению по каналу тангажа, изолирующие элементы 2 и горизонтально расположенные секторы 3 с угловыми размерами π/3, соответствующие управлению по каналу рыскания. Вертикально расположенным секторам 1 соответствуют трехпозиционные опорные периодические по углу крена ракеты модулирующие сигналы с шириной импульсов, равной 2·π/3, а горизонтально расположенным секторам 3 соответствуют трехпозиционные опорные периодические по углу крена ракеты модулирующие сигналы с шириной импульсов, равной π/3, что представлено на фиг.4.
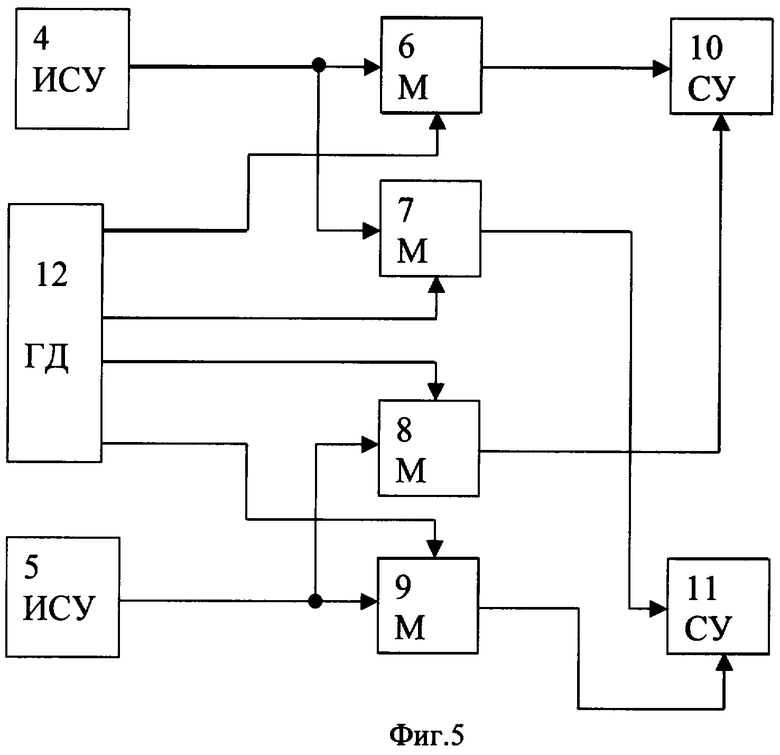
Структура, представленная на фиг.5, поясняет предлагаемый способ модуляции релейных сигналов управления вращающейся по углу крена ракетой и состоит из источников сигналов управления (ИСУ) в канале тангажа 4 и рыскания 5, модуляторов (М) в канале тангажа 6 и 7 и рыскания 8 и 9, суммирующих усилителей (СУ) в канале тангажа 10 и рыскания 11, гироскопического датчика (ГД) 12.
Устройство в соответствии с предлагаемым способом работает следующим образом.
Гироскопический датчик 12 формирует трехпозиционные опорные периодические по углу крена ракеты модулирующие сигналы Су(γ), Sy(γ) в канале тангажа и Sz(γ), Сz(γ) в канале рыскания, сдвинутые относительно друг друга на угол π/2, при этом сигналы Су(γ) и Sy(γ) в канале тангажа имеют ширину импульсов, равную 2·π/3, а сигналы Sz(γ) и Cz(γ) в канале рыскания имеют ширину импульсов, равную π/3 (фиг.4).
Сигналы управления с выходов источников релейных сигналов управления в каналах тангажа 4 и рыскания 5 перемножаются (модулируются) соответственно на модуляторах 6 и 7 в канале тангажа и модуляторах 8 и 9 в канале рыскания с соответствующими модулирующими сигналами Су(γ), Sy(γ) в канале тангажа и Sz(γ), Cz(γ) в канале рыскания (фиг.5).
Суммирование промодулированных сигналов с выходов модуляторов 6 и 8, а также с выходов модуляторов 7 и 9 осуществляется соответственно на суммирующих усилителях 10 и 11 согласно зависимостям (1) и (2).


Для оценки эффективности предлагаемого способа и устройства для его осуществления разложим в ряд Фурье трехпозиционные (уровни "-1", "0" и "+1") сигналы U(γ) (соответственно Су(γ), Sy(γ), Sz(γ), Cz(γ)) с выходов гироскопического датчика опорных периодических по углу крена ракеты модулирующих сигналов известного и предлагаемого устройств для модуляции релейных сигналов управления вращающейся по углу крена γ ракетой в соответствии с зависимостью (3).

где U(γ)=0 для -π≤γ<-π+α, -α<γ<α, π-α<γ≤π;
U(γ)=-A для -π+α≤γ≤-α;
U(γ)=A для α≤γ≤π-α;
А=1 - амплитуда релейного сигнала;
0<α<π/2 - угол, характеризующий сигнал с выхода известного (α=π/4) и предлагаемого (α=π/6 и α=π/3 соответственно для сигналов Су(γ), Sy(γ) И Sz(γ), Сz(γ)) устройств.
Для α=π/4 получаем:


Для α=π/6 получаем:


Для α=π/3 получаем:


Анализ зависимостей (4) и (5) показывает, что для известного устройства коэффициенты амплитуд 1-й (основной) и 3-й гармонических составляющих по каналам тангажа и рыскания попарно равны между собой: AY1=AZ1=0,90, АY3=АZ3=0,30; коэффициентами амплитуд 5-й и последующих гармоник можно пренебречь ввиду их малости.
Анализ зависимостей (6)-(9) показывает, что для предлагаемого устройства коэффициенты амплитуд 1-й (основной) и 3-й гармонических составляющих по каналам тангажа и рыскания будут отличаться друг от друга: AY1=1,10, AZ1=0,64 и АY3=0, AZ3=0,42; коэффициентами амплитуд 5-й и последующих гармоник можно пренебречь ввиду их малости.
Положительный эффект (повышение точности наведения) от применения предлагаемого способа и устройства для его осуществления достигается за счет:
- увеличения коэффициента амплитуды 1-й гармонической составляющей по каналу тангажа AY1, по которой осуществляется управление, до величины 1,10, что на 22% больше, чем в известном способе и устройстве для его осуществления;
- отсутствия 3-й гармонической составляющей по каналу тангажа, являющейся помеховой составляющей, в трехпозиционном сигнале с выхода предлагаемого устройства (в известном устройстве такая гармоника присутствует).
Результаты анализа динамики замкнутого контура управления с предлагаемым устройством показали, что за счет перераспределения секторов управления между каналами тангажа и рыскания (расширения секторов управления до 2·π/3 в канале тангажа) возможно обеспечить:
- уменьшение отклонений центра масс ракеты от линии визирования цели;
- снижение чувствительности ракеты к повышенным начальным возмущениям в канале тангажа и к нестабильности характеристик рулевого привода;
- ограничение влияния разброса параметров ракеты (например, разброса угла установки стабилизаторов) в пределах технологических допусков на динамику контура управления.
Чередование секторов коллектора с угловыми мерами 2·π/3 и π/3 в предлагаемом устройстве наиболее целесообразно, так как уменьшение несимметрии между каналами, например, до сочетания (5·π/9)×(4·π/9), не обеспечивает требуемой точности наведения (в этом случае коэффициент АY1=0,96, что лишь на 7% превышает аналогичный показатель для известного устройства, у которого АY1=0,90), а дальнейшее наращивание несимметрии, например, до сочетания (7·π/9)×(2·π/9), во-первых, не обеспечивает существенного прироста коэффициента AY1 (прирост составляет 8-9%), а во-вторых, снижает до недопустимо малой величины 0,43 коэффициент AZ1. Кроме того, только при указанном сочетании (2·π/3)×(π/3) обеспечивается отсутствие 3-й гармонической составляющей по каналу тангажа в трехпозиционных сигналах с выходов предлагаемого устройства, что улучшает качество наведения.
Промодулированные предлагаемым устройством сигналы Uу1 и Uz1 поступают на рулевой привод, осуществляющий отработку этих сигналов, т.е. перекладку рулей в соответствии с изменением знаков указанных сигналов. Вращающаяся по углу крена ракета демодулирует отклонение рулей, в результате чего в каждой из плоскостей создается управляющий момент, соответствующий исходным командам управления в измерительной системе координат. Обеспечение рационального использования имеющейся располагаемой перегрузки планера осуществляется за счет увеличения длительности нахождения рулевых органов на упорах, соответствующих управлению по каналу тангажа.
Преимуществами предлагаемого устройства являются:
- повышение точности в части уменьшения отклонений центра масс ракеты от линии визирования цели в канале тангажа вследствие рационального использования имеющейся располагаемой перегрузки планера в канале тангажа;
- снижение вероятности столкновения ракеты с подстилающей поверхностью в случае ее непосредственной близости (1,0-1,5 м) к линии визирования цели;
- пониженная чувствительность замкнутого контура управления к начальным возмущениям в канале тангажа и к нестабильности характеристик рулевого привода;
- ограничение влияния разброса параметров ракеты (например, разброса угла установки стабилизаторов) в пределах технологических допусков на динамику контура управления.
Таким образом, применение предлагаемого способа и устройства для его осуществления позволяет повысить точность наведения вращающихся по углу крена ракет с релейными приводами рулевых органов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486428C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ | 2000 |
|
RU2184921C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2006 |
|
RU2321814C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532993C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375667C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310151C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА (ВАРИАНТЫ) | 2006 |
|
RU2326323C2 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАНАЛЬНОЙ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309446C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ | 2012 |
|
RU2511610C1 |
Изобретение относится к области разработки систем наведения ракет. Способ, в котором формируют трехпозиционные опорные периодические по углу крена ракеты модулирующие сигналы, которые сдвинуты относительно друг друга на угол π/2. Умножают релейные сигналы управления на соответствующие им трехпозиционные опорные периодические по углу крена ракеты модулирующие сигналы. Устройство содержит гироскопический датчик модулирующих сигналов, содержащий коллектор, состоящий из 4-х изолированных друг от друга проводящих секторов. Техническим результатом является повышение точности наведения вращающихся по углу крена ракет с релейными приводами рулевых органов. 2 н. и 1 з.п. ф-лы, 5 ил.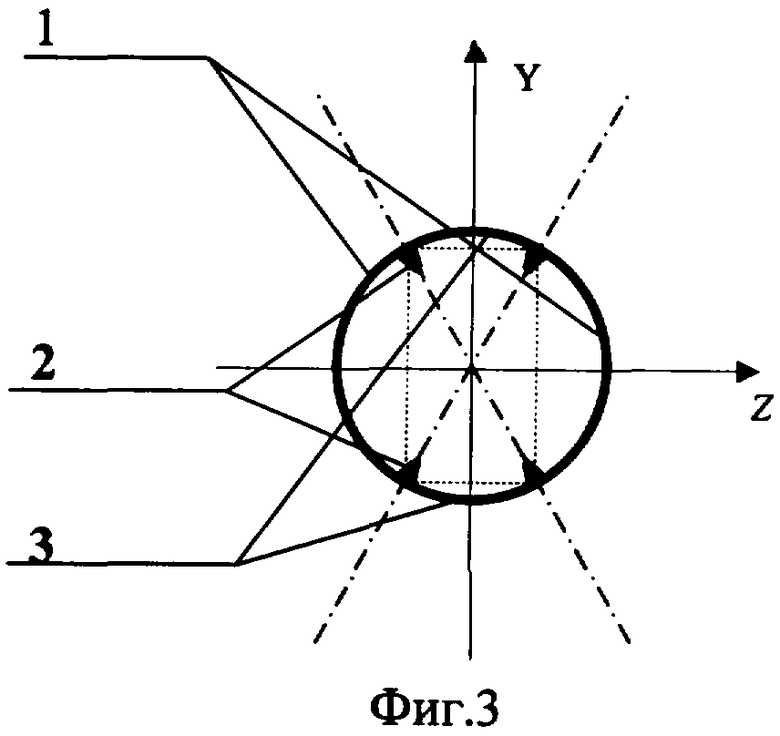
| КУЗОВКОВ Н.Т | |||
| Системы стабилизации летательных аппаратов (баллистических и зенитных ракет) | |||
| - М.: Высшая школа, 1976, с.269 | |||
| СПОСОБ ФОРМИРОВАНИЯ КОМАНДЫ УПРАВЛЕНИЯ СНАРЯДОМ, РЕГУЛЯРНО ВРАЩАЮЩИМСЯ ПО УГЛУ КРЕНА С ПОМОЩЬЮ АЭРОДИНАМИЧЕСКИХ СИЛ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2131576C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ | 2000 |
|
RU2184921C2 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ РАЗВИТИЯ МЕТАСТАЗОВ В ПЕЧЕНИ У БОЛЬНЫХ РАКОМ ТОЛСТОЙ КИШКИ | 2018 |
|
RU2686687C1 |
| US 5042742, 27.08.1991. | |||

