Изобретение относится к управляющей технике и может быть использовано при построении структуры устройств обработки данных, представляющих собой программируемые логические контроллеры.
Программируемые логические контроллеры содержат следующие обязательные элементы:
1) модули ввода МВв, которые осуществляют преобразование аналоговых и дискретных сигналов внешних электрических датчиков в цифровую форму и, в некоторых контроллерах, первичную обработку сигналов (фильтрация, линеаризация и т.п.);
2) центральный процессор ЦП, который по программам пользователя обрабатывает цифровые значения входных сигналов, полученных от МВв, и формирует цифровые значения выходных аналоговых и дискретных управляющих сигналов;
3) модули вывода МВыв, которые осуществляют преобразование цифровых значений выходных сигналов в электрические аналоговые и дискретные сигналы управления внешними электрическими исполнительными органами;
4) средства сопряжения процессора ЦП и модулями ввода и вывода сигналов (цифровые шины).
Возможно совмещение в одном модуле входных и выходных каналов ввода и вывода аналоговых и дискретных сигналов. В дальнейшем модули ввода МВв и вывода МВыв имеют общее обозначение МВВ.
Цифровые шины сопряжения ЦП и МВВ могут быть параллельными и последовательными. В контроллерах с параллельной шиной передача адреса МВВ и цифровых значений сигналов осуществляется параллельными двоичными кодами, при этом каждому биту выделен отдельный провод и все биты кодов передаются одновременно. В контроллерах с последовательной шиной передача адреса МВВ и цифровых значений сигналов осуществляется последовательными кодами, при этом все биты кода передаются друг за другом по общему проводу.
Работа контроллера заключается в циклическом выполнении функций, заложенных в прикладной (технологической) программе пользователя. В каждом цикле контроллер выполняет следующие функции в описанной ниже последовательности:
1) Ввод за время Твв в центральный процессор через параллельную или последовательную шину цифровых значений входных аналоговых и дискретных сигналов датчиков с модулей ввода. Ввод данных с модулей осуществляется поочередно, т.е. сначала осуществляется ввод с одного модуля, затем со второго и т.д.
2) Обработка за время Тобр центральным процессором полученных цифровых значений сигналов и формирование цифровых значений управляющих выходных сигналов. Различные задачи обработки данных (защита, регулирование, логическое управление и т.п.) выполняются последовательно, друг за другом.
3) вывод за время Твыв из центрального процессора через параллельную или последовательную шину цифровых значений управляющих сигналов в модули вывода и их преобразование в электрические аналоговые и дискретные сигналы управления исполнительными органами. Вывод данных в модули осуществляется поочередно, т.е. сначала осуществляется вывод в один модуль, затем во второй и т.д. Полный цикл работы контроллера при этом равен
Тц=Твв+Тобр+Твыв
Время цикла контроллеров с последовательной шиной значительно больше, чем у контроллеров с параллельной шиной при одном и том же времени обработки сигналов.
Достоинствами контроллеров с параллельной шиной является высокая производительность шины и малое время обмена данными между МВВ и процессором. Недостатками контроллеров этого типа является большое число (несколько десятков) линий связи цифровой шины и контактов для подключения к ней, и обусловленные этим низкие надежность и помехоустойчивость, сложность контроля достоверности передаваемых данных, необходимость в громоздком и дорогом базовом конструктиве для размещения модулей и шины, который имеет фиксированное число посадочных мест, ограничивающее возможности масштабирования контроллера по числу входных и выходных сигналов.
Достоинствами контроллеров с последовательной шиной является малое число (2-4) линий связи цифровой шины и контактов для подключения к ней, и обусловленные этим высокая надежность и помехоустойчивость, простота контроля достоверности передаваемых данных подсчетом контрольной суммы, простота базовой конструкции или ее отсутствие (монтаж модулей на DIN-рейку), широкие возможности масштабирования контроллера по числу входных и выходных сигналов. Недостатками контроллеров этого типа является низкая производительность шины и большое время обмена данными между МВБ и ЦП за счет передачи данных последовательным кодом.
Общими недостатками контроллеров обоих типов, обусловленными функциональной централизацией их структуры (один процессор, одна цифровая шина), являются:
1. Низкая живучесть выполнения функций обработки данных и управления. При выходе из строя центрального процессора прекращается выполнение всех функций.
2. Низкая живучесть выполнения функций обмена данными между центральным процессором и модулями ввода-вывода. Отказ цифровой шины связи приводит к отказу всего контроллера.
3. Единое время цикла выполнения функций обмена данными с разными модулями и разных функций обработки этих данных, а следовательно, и единая частота их выполнения. Но разные функции требуют разной частоты их выполнения. Например, функции сбора информации или функции оптимизации процесса могут выполняться значительно реже, чем функции аварийной защиты, но поскольку все функции выполняются в едином цикле, последовательно друг за другом, то функции оптимизации будут выполняться с частотой функций защиты (выполнение функций защиты с более низкой частотой функций оптимизации недопустимо по соображениям безопасности). Поэтому для реализации наиболее динамичных функций приходится выбирать более дорогие высокопроизводительные центральные процессоры и цифровые шины с избыточной вычислительной мощностью и непроизводительным ее расходованием на менее динамичные задачи, что снижает коэффициент их использования, либо распределять функции с разными динамическими требованиями по контроллерам с разной производительностью. Решение проблемы с помощью использования инициативных сигналов и механизма прерываний центрального процессора для быстрой активизации высокодинамичных функций приводит к неконтролируемому времени цикла выполнения других функций.
4. Большое время обмена данными между центральным процессором и модулями ввода-вывода из-за последовательной организации этой процедуры, при которой в любой момент времени обмен осуществляется только с одним модулем. В зависимости от числа модулей МВВ, частоты работы цифровой шины, производительности, объема и сложности управляющей программы ЦП суммарное время ввода-вывода
Твв=Тв+Твыв
может превышать время обработки Тобр цифровых значений сигналов, что является показателем неэффективного использования вычислительных ресурсов центрального процессора и совершенно недопустимо при автоматизации объектов повышенной опасности.
Известно устройство обработки данных, которое включает в себя средства памяти для хранения данных в множестве независимых участков памяти, средства обработки информации, включающие в себя множество процессоров, осуществляющих заранее установленную обработку данных, сохраненных на множестве участков памяти, и средства контроля для контроля вышеупомянутых средств обработки информации, оценивая величину процессора из множества процессоров по отношению к области из множества независимых областей (патент США №4665483). Данное устройство предназначено в основном для записи и хранения информации. Основная обработка данных осуществляется в множестве процессоров ввода-вывода, которые связаны с независимыми участками памяти. Процессор имеет в основном функции управления. Устройство громоздко и сложно как по конструктивному выполнению, так и по управлению, в результате чего снижается надежность. В целом данное устройство оказывается непригодным для решения задач обработки информации.
Наиболее близким аналогом заявленного изобретения является устройство обработки данных, содержащее процессор для обработки данных, модули ввода и вывода данных, шину передачи данных (патент США №4053950). Данное устройство входит в состав системы обработки данных с усовершенствованными методами ввода и вывода (I/O) данных. Логические устройства управления вводом-выводом (I/O), или канал управления, процессора (CPU) соединен с множеством периферийных устройств управления вводом-выводом параллельно с помощью многолинейной шины интерфейса, которая включает в себя двунаправленные линии передачи данных и двунаправленные линии адресной передачи. Шина интерфейса также включает однонаправленные линии к и от узлов управления периферийными устройствами, которые синхронизируют операцию использования шины. Однако в самом устройстве обработка информации осуществляется в соответствии с описанными выше принципами.
Технический результат, на достижение которого направлено данное изобретение, заключается в повышении надежности и сокращении времени обработки информации в устройстве обработки информации (то есть в самом контроллере), в том числе путем децентрализации различных функций ввода-вывода и обработки данных.
Технический результат достигается тем, что устройство обработки данных, содержащее процессор для обработки данных, модули ввода и вывода данных, шину передачи данных, снабжено несколькими подключенными к указанному процессору связными процессорами, каждый из которых связан с соответствующими модулями ввода и вывода данных посредством шины с возможностью использования последовательного канала связи, при этом в каждый модуль ввода-вывода введен программируемый пользователем управляющий процессор.
По другому варианту устройство обработки данных, содержащее процессор для обработки данных, модули ввода и вывода данных, блок памяти, шину передачи данных, снабжено несколькими подключенными к указанному процессору связными процессорами, каждый из которых связан с соответствующими модулями ввода и вывода данных посредством шины с возможностью использования последовательного канала связи, при этом в каждый модуль ввода-вывода введен программируемый пользователем управляющий процессор и два связных процессора, соединенных с управляющим процессором и с упомянутой шиной.
В дальнейшем изобретение поясняется конкретным примером выполнения и прилагаемым чертежом. Устройство обработки данных содержит процессор 1 для обработки данных (ОП), модули ввода и вывода данных (МВВ, на чертеже не показаны), подключенные посредством шины 2.1, 2.2, 2.3, ... 2.n к связным процессорам (СП) 3.1, 3.2, 3.3, ... 3.n с возможностью использования последовательного канала связи, соединенным с процессором 1. Взаимодействие ОП с каждым СП осуществляется через память ОП методами прямого доступа к памяти или двупортовую промежуточную память. ОП в этой структуре работает в режиме ведущего устройства, СП - в режиме ведомых устройств. Синхронизация работы ОП и каждого СП осуществляется с помощью дискретных сигналов СТАРТ, которыми ОП запускает в работу конкретные СП, и дискретных сигналов ГОТОВ, которыми конкретные СП сообщают ОП о конце сеанса обмена. ОП осуществляет только обработку цифровых значений входных аналоговых и дискретных сигналов и формирование цифровых значений выходных управляющих аналоговых и дискретных сигналов. Каждый СП осуществляет ввод цифровых значений входных сигналов с подключенных к его последовательной шине МВв и вывод цифровых значений выходных управляющих сигналов в подключенные к его последовательной шине МВыв. ОП и все СП работают параллельно. В конце каждого цикла ОП выдает в СП сигналы СТАРТ и запускает процедуру обмена. Во время i-го цикла ОП все СП параллельно осуществляют сначала вывод цифровых значений выходных управляющих сигналов (i-1)-го цикла работы из ОП в МВыв, затем ввод цифровых значений входных сигналов из МВв в ОП для его (i+1)-го цикла работы. По окончании процедуры обмена СП формируют сигналы ГОТОВ. После получения этих сигналов от всех СП ОП начинает (i+1) цикл своей работы. Таким образом, операции ввода-вывода и обработки совмещаются во времени.
Преимуществами данного решения являются:
1) Устранение главного недостатка контроллеров с последовательной шиной - большого времени обмена данными между центральным процессором и модулями ввода-вывода при сохранении всех преимуществ контроллеров этого типа. Так как суммарная производительность нескольких последовательных, параллельно работающих шин приближается к производительности параллельной шины, это приводит к существенному сокращению общего времени цикла контроллера.
2) Повышение живучести функций ввода-вывода, так как выход из строя одной шины приводит к деградации контроллера, а не его отказу в целом.
3) Возможности повышения надежности функций ввода-вывода путем резервирования последовательных шин.
4) Возможность подключения к разным шинам разного числа МВВ и регулирования таким образом частоты обмена данными процессора с разными группами МВВ.
В заявленное по первому пункту устройство в состав модулей ввода-вывода введен программируемый пользователем управляющий процессор УП, который, кроме функций ввода, вывода и первичной обработки сигналов (фильтрация вводимых сигналов, линеаризация характеристик датчиков и т.п.), выполняет автономно и асинхронно по отношению к процессору 1 или параллельно с ним различные управляющие функции (аварийной защиты и аварийного отключения, регулирования, логического управления, ручного управления и т.п.), используя свои входные и выходные аналоговые и дискретные сигналы (далее по тексту модули ввода, вывода и управления - МВВУ). Структура цикла работы МВВУ такая же, как и контроллеров с традиционной структурой, однако в силу небольшой размерности решаемых этими модулями задач и их выполнения индивидуальным модулем они выполняются со значительно меньшим временем цикла, чем при их же решении центральным процессором в совокупности с другими функциями.
Преимуществами такого решения являются:
1) Повышение динамических свойств контроллера без избыточной вычислительной мощности путем решения разных задач с разным временем цикла на разных МВВУ.
2) Повышение надежности и живучести выполнения наиболее ответственных функций путем их автономного выполнения в МВВУ (в том числе дублированных), так как выход из строя центрального процессора приводит к деградации контроллера, а не к его отказу в целом.
3) Снижение сложности и трудоемкости разработки, отладки и модернизации программного обеспечения за счет суперпозиции функций и их распределения между центральным процессором и разными МВВУ.
4) Возможность автоматизации малых объектов только на МВВУ, без центрального процессора, что снижает стоимость проектов автоматизации и сохраняет однородность аппаратуры на предприятии, где имеются как сложные, так и простые объекты автоматизации.
В другом варианте устройства обработки данных в каждый модуль ввода-вывода введен программируемый пользователем управляющий процессор (УП) и два связных процессора, соединенных с управляющим процессором и с упомянутой шиной.
Взаимодействие УП и каждого СП осуществляется через память СП методами прямого доступа к памяти или двупортовую промежуточную память. УП в этой структуре работает в режиме ведомого устройства, СП - в режиме ведущих устройств. Синхронизация работы УП и каждого СП осуществляется с помощью дискретных сигналов СТАРТ и ГОТОВ. СП при получении по последовательной шине от ОП новых данных формирует сигнал СТАРТ, запуская в УП процедуру обмена данными с соответствующим СП. По этому сигналу УП считывает из памяти соответствующего СП данные (цифровые значения выходных сигналов, команд и т.п.), записывает в память СП цифровые значения своих входных сигналов и устанавливает сигнал ГОТОВ, по которому СП передает эти данные по последовательной шине в ОП, а УП в это время начинает очередной цикл выполнения своей управляющей программы. Таким образом, операции ввода-вывода и обработки совмещаются во времени. СП имеют различный приоритет по управлению выходами МВВУ. По чтению цифровых значений входных сигналов УП доступен обоим СП, по записи цифровых значений выходных сигналов УП доступен всегда наиболее приоритетному СП, а с его санкции - менее приоритетному СП. При дублировании шин связь между процессорами и модулями ввода-вывода осуществляется по двум шинам одновременно, поэтому выход из строя одной из шин (например, ее обрыв) не приводит к отказу всего контроллера, так как связь продолжается по другой шине. Дублирование процессоров осуществляется для сохранения работоспособности контроллера при выходе из строя одного из двух процессоров. В нормальном режиме один из процессоров находится в активном режиме, то есть осуществляет связь с МВВУ и управление устройством, а также передает свою базу данных по последовательному каналу второму процессору. Таким образом, осуществляется синхронизация баз данных процессоров. Второй процессор находится в пассивном режиме, программу управления не выполняет и логически отключен от шин МВВУ, он только копирует у себя базу данных активного процессора. При выходе из строя активного процессора он переходит в состояние отказа, логически отключается от шины МВВУ и перестает посылать сообщения со значениями своей базы данных пассивному процессору. Прекращение обмена является для пассивного процессора сигналом для перехода в активный режим. Он логически подключается к шине МВВУ и начинает выполнять программу управления на своей базе данных, которая является копией базы данных "бывшего" активного процессора на момент его отказа.
Преимущества решения следующие:
1) Повышение динамических свойств МВВУ за счет параллельного выполнения функций обработки и обмена данными.
2) Возможности повышения надежности функций ввода-вывода путем резервирования последовательных шин и СП.
3) Возможности работы МВВУ по управлению двух процессоров с разными по приоритету функциями управления (например, менее приоритетных функций регулирования и более приоритетных функций защиты).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАТФОРМА ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ БОЕВЫХ КОМПЛЕКСОВ | 2014 |
|
RU2595507C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТЕРРИТОРИАЛЬНО-РАСПРЕДЕЛЕННОЙ СИСТЕМЫ УПРАВЛЕНИЯ | 2017 |
|
RU2688097C1 |
| БОРТОВАЯ ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА КОМПЛЕКСОВ УПРАВЛЕНИЯ И НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2009 |
|
RU2392194C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2399088C2 |
| КОМПЛЕКС ПРОГРАММНО-АППАРАТНЫХ СРЕДСТВ АВТОМАТИЗАЦИИ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 2004 |
|
RU2279117C2 |
| ЭЛЕКТРОННАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА | 2007 |
|
RU2344472C1 |
| ПРОГРАММИРУЕМОЕ УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2009 |
|
RU2419139C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПРОЧНОСТИ КРЫЛА ВОЗДУШНОГО СУДНА | 2011 |
|
RU2469289C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СИСТЕМОЙ РАЗГРУЗКИ ВИБРОИСПЫТАТЕЛЬНОЙ УСТАНОВКИ | 2021 |
|
RU2778077C1 |
| УСТРОЙСТВА, СИСТЕМЫ И СПОСОБЫ, КАСАЮЩИЕСЯ СБОЯ PLC-СИСТЕМЫ | 2007 |
|
RU2419827C2 |
Изобретение относится к управляющей технике при построении структуры устройств обработки данных, представляющих собой программируемые логические контроллеры. Предложенное изобретение позволяет повысить надежность и сократить время обработки информации в устройстве обработки информации (то есть в самом контроллере), в том числе путем децентрализации различных функций ввода-вывода и обработки данных. Устройство обработки данных содержит процессор для обработки данных (ОП), модули ввода и вывода данных (МВВ, на чертеже не показаны), подключенные посредством шины к связным процессорам (СП) с возможностью использования последовательного канала связи, соединенным с процессором. При этом в состав модулей ввода-вывода введен программируемый пользователем управляющий процессор УП, который, кроме функций ввода, вывода и первичной обработки сигналов, выполняет автономно и асинхронно по отношению к процессору или параллельно с ним различные управляющие функции. В другом варианте устройства обработки данных в каждый модуль ввода-вывода введен программируемый пользователем управляющий процессор (УП) и два связных процессора, соединенных с управляющим процессором и с упомянутой шиной. 2 н.п. ф-лы, 1 ил.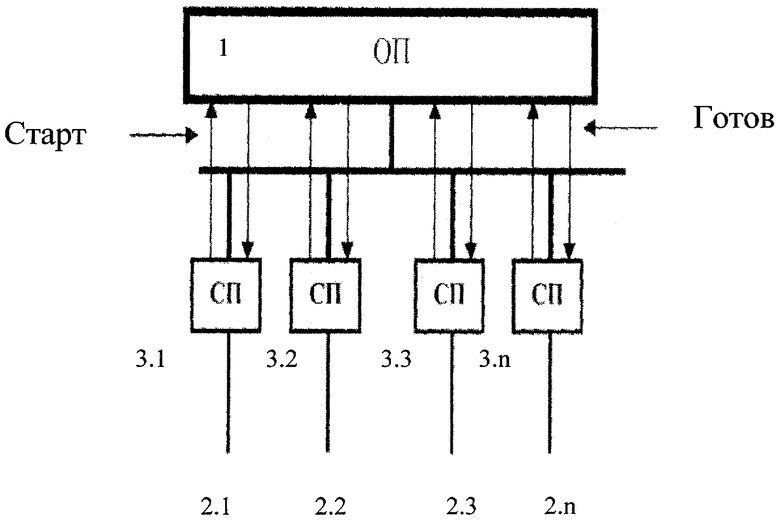
| US 4053950, 11.10.1977 | |||
| JP 8006908, 12.01.1996 | |||
| МНОГОПРОЦЕССОРНЫЙ КОНТРОЛЛЕР ДЛЯ УПРАВЛЕНИЯ СЛОЖНЫМ ТЕХНОЛОГИЧЕСКИМ ОБЪЕКТОМ | 2003 |
|
RU2263952C2 |
| МНОГОПРОЦЕССОРНАЯ СИСТЕМА ОБРАБОТКИ ДАННЫХ | 1997 |
|
RU2139566C1 |
| СПОСОБ ОБРАБОТКИ ЦИФРОВЫХ ДАННЫХ В ЗАПОМИНАЮЩЕМ УСТРОЙСТВЕ И ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2004 |
|
RU2263951C2 |

