Предлагаемое изобретение относится к способам и устройствам автоматического регулирования с широтно-импульсным модулятором (ШИМ) путем воздействия на позиционный исполнительный механизм (исполнительный механизм постоянной скорости), который имеет широкое применение во многих отраслях промышленности и энергетике.
Известен способ (патент RU №4406163/24 С1, G05B 11/28. В.Ф. Бирюков, С.П.Ботуз Способ автоматического регулирования и система для его осуществления) релейно-импульсного регулирования, в котором повышение точности отработки ступенчатых программно-задающих воздействий достигается путем квантования времени, в течение интервала которого ошибка регулирования находится в зоне нечувствительности трехпозиционного регулирования, при этом длительность периода импульсного воздействия на объект управления формируют равной сумме длительностей эталонного сигнала и корректирующего сигнала, величина которого равна интегральной величине изменения нормированного сигнала рассогласования на предшествующем периоде, длительность импульсного воздействия на объект управления формируют как интегральное значение квадрата нормированного сигнала рассогласования на предшествующем периоде импульсного воздействия на объект управления, а полярность каждого импульсного воздействия формируют на основе непрерывного слежения за знаком разности между текущим сигналом рассогласования и его значением в момент окончания предшествующего периода и запоминания знака этой разности в момент окончания предшествующего периода воздействия на объект управления.
Недостатком известного способа является отсутствие ограничения минимальной величины импульсного воздействия, что приводит к частым включениям электродвигателя механизма и соответственно повышенному его физическому износу, т.е. снижению надежности работы.
Наиболее близким по технической сущности к предлагаемому изобретению является способ (А.С.Клюев, А.Т.Лебедев, С.А.Клюев, А.Г.Товарнов Наладка средств автоматизации и автоматических систем регулирования. Справочное пособие./Под. ред. А.С.Клюева. - 2-е изд., перераб. и доп. - М.: Энергоатомизат, 1989. - 368 с., п.3.4.) управления с широтно-импульсным регулированием путем выделения сигнала ошибки как разности выходного сигнала системы и сигнала задания, который преобразуется регулятором (в соответствии с заданным законом регулирования) в управляющее воздействие. Управляющее воздействие с помощью широтно-импульсного модулятора (релейного элемента) преобразуется в серию импульсов, которые перемещают позиционный исполнительный механизм в соответствующую сторону ("больше" или "меньше"), тем самым, воздействуя на объект регулирования. При этом величина перемещения позиционного исполнительного механизма зависит от сформированной длительности импульса. Кроме этого, в некоторых системах регулирования (например, в энергетической отрасли) в ШИМ устанавливается минимальная длительность импульса Тимп, которая определяет минимально возможную величину перемещения позиционного исполнительного механизма и характеризует количество включений электродвигателя механизма.
Недостатком известного способа и реализуемых на его основе устройств является низкая надежность. Например, если уменьшение Тимп приводит к повышению точности позиционирования позиционного исполнительного механизма (соответственно и точности регулирования), то одновременно увеличивается количество включений электродвигателя позиционного исполнительного механизма, тем самым имеет место повышенный физический износ электродвигателя и позиционного исполнительного механизма в целом. Фиксированное увеличение Тимп приводит к уменьшению количества включений электродвигателя позиционного исполнительного механизма, но при этом имеет место ухудшение точности позиционирования позиционного исполнительного механизма и соответственно снижение качества регулирования.
Технический результат предлагаемого изобретения направлен на оптимизацию величины минимальной длительности импульса в зависимости от скорости изменения ошибки регулирования в канале регулирования и расширение функциональных возможностей устройства путем минимизации частоты включения электродвигателя механизма, повышение точности позиционирования исполнительного механизма и качества регулирования.
Технический результат достигается путем выделения сигнала ошибки регулирования как разности выходного сигнала системы и сигнала задания, его преобразования регулятором в соответствии с заданным законом регулирования в управляющее воздействие, дальнейшего формирования широтно-импульсным модулятором серии импульсов, перемещающих позиционный исполнительный механизм в сторону "больше" или "меньше", воздействуя на объект регулирования, минимальная длительность импульса воздействия на объект регулирования в широтно-импульсном модуляторе динамически изменяется и зависит от сигнала скорости изменения ошибки регулирования по модулю и ограничена снизу и сверху на минимально и максимально допустимые величины длительности импульса, при этом сигнал скорости изменения ошибки регулирования формируется с помощью блока дифференцирования или с помощью регулятора, если используется регулятор с пропорционально-дифференцирующим законом регулирования.
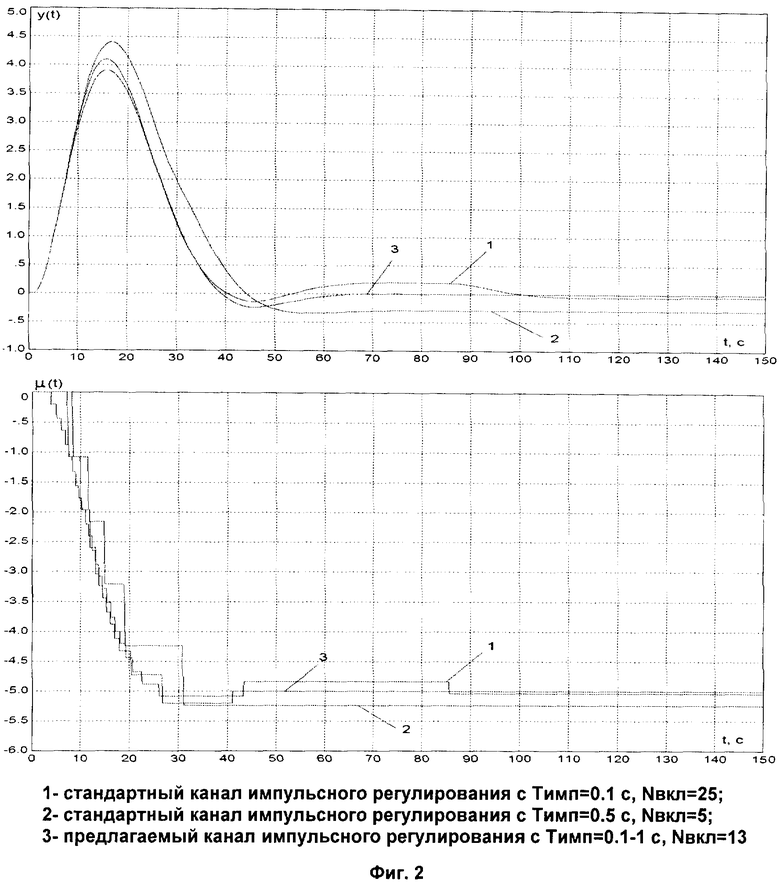
На фиг.1 представлена схема устройства, реализующего предлагаемый способ автоматического регулирования, на фиг.2 представлены результаты испытаний системы автоматического регулирования, на фиг.3 представлены вид сигналов в системе регулирования.
Схема способа автоматического регулирования (фиг.1) содержит 1 - объект регулирования; 2 - датчик; 3 - блок преобразования сигнала; 4 - блок суммирования сигналов; 5 - блок формирования задания; 6 - регулятор; 7 - релейный элемент (ШИМ); 8 - блок формирования и усиления импульсов; 9 - исполнительный механизм; 10 - блок дифференцирования; 11 - блок вычисления модуля; 12 - блок ограничения; 13 - блок изменения времени импульса.
В предлагаемом способе автоматического регулирования выделяется сигнал ошибки регулирования ε как разность сигнала регулируемого параметра системы y и сигнала задания yзад. Далее сигнал ошибки регулирования ε преобразуется регулятором в соответствии с заданным законом регулирования в управляющее воздействие z, поступающее на релейный элемент (широтно-импульсный модулятор). На выходе релейного элемента формируются серии импульсов u, перемещающие позиционный исполнительный механизм в сторону "больше" или "меньше", тем самым воздействуя на объект регулирования. Минимальная длительность импульса  в релейном элементе (широтно-импульсном модуляторе) динамически изменяется и зависит от сигнала скорости изменения ошибки регулирования ε' по модулю, ограниченного снизу и сверху на минимально и максимально допустимые величины длительности импульса. Сигнал скорости изменения ошибки регулирования ε' может формироваться с помощью блока дифференцирования (ε'1) или с целью уменьшения количества блоков сигнал скорости изменения ошибки регулирования (ε'2) может формироваться с помощью блока регулятора, если используется регулятор с пропорционально-дифференцирующим законом регулирования. Далее с помощью блока вычисления модуля вычисляется модуль сигнала скорости изменения ошибки регулирования, выполняется его ограничение снизу и сверху с помощью блока ограничения и с помощью блока изменения времени импульса изменяет минимальную длительность импульса
в релейном элементе (широтно-импульсном модуляторе) динамически изменяется и зависит от сигнала скорости изменения ошибки регулирования ε' по модулю, ограниченного снизу и сверху на минимально и максимально допустимые величины длительности импульса. Сигнал скорости изменения ошибки регулирования ε' может формироваться с помощью блока дифференцирования (ε'1) или с целью уменьшения количества блоков сигнал скорости изменения ошибки регулирования (ε'2) может формироваться с помощью блока регулятора, если используется регулятор с пропорционально-дифференцирующим законом регулирования. Далее с помощью блока вычисления модуля вычисляется модуль сигнала скорости изменения ошибки регулирования, выполняется его ограничение снизу и сверху с помощью блока ограничения и с помощью блока изменения времени импульса изменяет минимальную длительность импульса  в релейном элементе (широтно-импульсном модуляторе).
в релейном элементе (широтно-импульсном модуляторе).
В устройстве автоматического регулирования регулируемый параметр с выхода объекта регулирования 1 с помощью датчика 2 преобразуется в сигнал регулируемого параметра системы y. Далее с помощью блока преобразования сигнала 3 сигнал регулируемого параметра системы y преобразуется к унифицированному виду. В блоке суммирования сигналов 4 сигнал регулируемого параметра системы y со знаком минус суммируется с сигналом задания yзад, поступающим с блока формирования задания 5. В результате суммирования формируется сигнал ошибки регулирования ε, который поступает на регулятор 6, где в соответствии с заданным законом регулирования преобразуется в управляющее воздействие z, поступающее на релейный элемент 7 (широтно-импульсный модулятор). На выходе релейного элемента 7 формируются серии импульсов u, которые с помощью блока формирования и усиления импульсов 8 перемещают позиционный исполнительный механизм 9 в сторону "больше" или "меньше", тем самым воздействуют на объект регулирования 1. Сигнал ошибки регулирования ε блоком дифференцирования 10 (ε'1) или блоком регулятора 6 (ε'2), если используется регулятор с пропорционально-дифференцирующим законом регулирования, преобразуется в сигнал скорости изменения ошибки регулирования ε'. Далее блоком вычисления модуля 11 вычисляется модуль сигнала скорости изменения ошибки регулирования, выполняется его ограничение снизу и сверху с помощью блока ограничения 12 и блоком изменения времени импульса 13 изменяется минимальная длительность импульса в релейном элементе 7 (широтно-импульсном модуляторе).
Из описанного выше видно, что совокупность признаков предлагаемого изобретения обеспечивает получение заявляемого технического результата - повышение точности позиционирования позиционного исполнительного механизма с сохранением заданной частоты включения электродвигателя механизма (Nвкл), которая обеспечивается за счет увеличения минимальной длительности импульса в переходном режиме и уменьшении в установившемся режиме работы системы регулирования. При этом реализация способа не ухудшает качество работы системы регулирования (фиг.2).
Таким образом, способ позволяет повысить точность позиционирования позиционного исполнительного механизма с сохранением заданной частоты включения электродвигателя механизма без существенной переработки системы регулирования с широтно-импульсным модулятором и позиционным исполнительным механизмом. Тем самым повышается эффективность работы системы регулирования (фиг.3).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ С РЕВЕРСИВНЫМ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ | 2014 |
|
RU2568523C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU2012034C1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОЩНОСТИ ПАРОГАЗОВЫХ УСТАНОВОК И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2601320C1 |
| Импульсный регулятор | 1983 |
|
SU1117585A1 |
| Многоканальная автоматическая система регулирования | 1986 |
|
SU1406564A1 |
| УСТРОЙСТВО ПОДГОТОВКИ ЭКСПЛУАТАЦИОННОГО ПЕРСОНАЛА ЭНЕРГЕТИЧЕСКОГО ОБОРУДОВАНИЯ | 2005 |
|
RU2282248C1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Импульсный регулятор | 1984 |
|
SU1251025A1 |

Способ и устройство относится к системам автоматического регулирования с широтно-импульсным модулятором, который с помощью импульсов "больше" или "меньше" управляет исполнительным позиционным механизмом, воздействующим на объект регулирования. Способ и устройство автоматического регулирования с широтно-импульсным модулятором и исполнительным позиционным механизмом путем выделения сигнала ошибки регулирования как разности выходного сигнала системы и сигнала задания, его преобразования регулятором в соответствии с заданным законом регулирования в управляющее воздействие, дальнейшего формирования широтно-импульсным модулятором серии импульсов, перемещающих позиционный механизм в сторону "больше" или "меньше", воздействуя на объект регулирования, при этом минимальная длительность импульса в широтно-импульсном модуляторе динамически изменяется и зависит от сигнала скорости изменения ошибки регулирования по модулю и ограниченного снизу и сверху на минимально и максимально допустимые величины длительности импульса. Технический результат - повышение надежности. 2 н. и 1 з.п. ф-лы, 3 ил.
| Релейно-импульсный регулятор | 1983 |
|
SU1674058A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU2012034C1 |
| GB 1274498 A, 17.05.1972. | |||

