Область техники, к которой относится изобретение
Предмет обсуждения, здесь раскрываемый, относится к области определения местоположения и, более конкретно, к процедурам поиска сигналов, полезных в процессе определения местоположения, извлечения измерений из этих сигналов, и определения местоположения объекта на основании этих измерений.
Уровень техники
GPS система определения географического местоположения (geo-location system) - это система орбитальных спутников земли, которая делает возможным для приемника сигналов от этих спутников определять местоположение этого приемника. Каждый из этих спутников передает сигнал, который частотно распределен с повторяющимся псевдослучайным шумовым (PN) кодом из 1.023 элементарных сигналов, однозначно идентифицирующих этот спутник. Эти 1.023 элементарных сигнала повторяются каждую миллисекунду. Сигнал также модулируется битами данных, которые имеют продолжительность 20 мс.
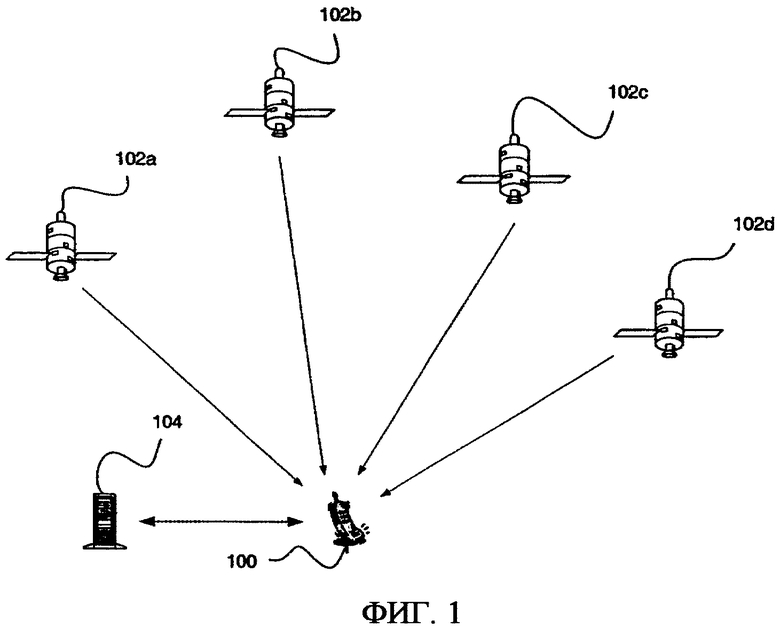
Фиг.1 показывает применение GPS системы определения географического местоположения, в которой приемник 100 в беспроводной системе связи принимает передачи от спутников 102a, 102b, 102c, 102d, видимых этому приемнику 100. Приемник 100 извлекает временные измерения из четырех или более этих передач. Приемник 100 предоставляет эти измерения модулю 104 определения местоположения (position determination entity, PDE), который определяет местоположение приемника 100 по этим измерениям. Альтернативно, по этой информации приемник 100 может определять свое собственное местоположение.
Приемник 100 ищет передачу от конкретного спутника посредством сопоставления псевдошумового (PN) кода для этого спутника с принятым сигналом. Принятый сигнал обычно является смесью передач от нескольких спутников, видимых для приемника 100, в присутствии шума. Это сопоставление выполняется над рядом возможных сдвигов этого PN кода. Каждый единственный временной сдвиг называется временной гипотезой. Полный набор гипотез, которые проверяются, называется поисковым окном во времени. Это поисковое окно также называется как поисковое окно в кодовом пространстве, так как каждое смещение указывает на иную точку внутри кодовой последовательности, которая составляет это "кодовое пространство".
Каждое сопоставление выполняется за "время интеграции". "Время интеграции" это время когерентной интеграции, умноженное на число когерентных интеграций, которые скомбинированы не когерентно.
Для конкретного PN кода, величина корреляции (сопоставления) называется как значение корреляции. Если имеется сильная корреляция между кодом, с которым принятый сигнал был частотно распределен, и локально сгенерированным PN кодом, то это значение корреляции является высоким. Значения корреляции, связанные с каждой гипотезой, определяют корреляционную функцию. Пики в этой корреляционной функции определяются и сравниваются с заданным шумовым порогом. Этот порог выбирается так, чтобы вероятность ложно обнаружить передачу спутника была ниже заданного уровня. Измерение относительного времени поступления сигналов, принятых от каждого спутника, определяется с помощью местоположения самого раннего пика, который находится выше выбранного порога. Следует заметить, что пики могут иметь то, что обычно называется как боковые лепестки. Боковые лепестки это вершины (или пики более нижнего уровня) на каждой стороне настоящего пика. Такие боковые лепестки, если обнаруживаются, игнорируются.
Имеется взаимозаменяемость между точностью и чувствительностью поиска и величиной времени, требуемого, чтобы выполнить этот поиск. Это компромиссное решение делается посредством установки времени когерентной интеграции, числа когерентных интеграций и размера окна поиска. Чем больше эти значения, тем выше чувствительность приемника 100. Более высокая чувствительность означает лучшее обнаружение слабых или задержанных передач. Это дает в результате более высокую точность в получающихся оценках местоположения. С другой стороны, если эти значения больше, то требуется более длительное время, чтобы получить необходимые временные измерения. Также увеличивается риск, что приемник 100 переполнится, так как увеличивается величина этих значений.
Когда предполагается, что передачи от спутников являются сильными, параметры поиска должны устанавливаться относительно низкими, чтобы минимизировать время поиска. Это уменьшает риск, что приемник 100 будет переполнен. Спутниковые передачи скорей всего будут сильными, когда, например, абонентская станция располагается снаружи в ясный день без атмосферных или относящихся к погоде возмущений. С другой стороны, когда предполагается, что передачи от спутников являются слабыми или задержанными, параметры поиска должны устанавливаться относительно высокими, чтобы избежать потери слабых или задержанных сигналов. Должно быть ясно, что потеря сигналов компрометирует точность результирующей оценки местоположения. Спутниковые передачи вероятно будут слабыми или задержанными, когда, например, абонентская станция располагается в помещении или имеются атмосферные или относящиеся к погоде возмущения.
Так как многие абонентские станции являются мобильными, в общем не может быть известно заранее, будут ли передачи сильными или слабыми. Следовательно, не существует способа определения, как устанавливать параметры поиска в любом конкретном условии. Соответственно, было бы предпочтительно иметь возможность устанавливать параметры поиска таким способом, который гарантирует, что слабые сигналы будут обнаруживаться, но, что сильные сигналы смогут обнаруживаться быстро и без переполнения приемника.
Сущность изобретения
Предложен способ поиска сигналов для использования в определении местоположения приемника. Этот способ начинается с проведения первого поиска. Измерения извлекают из результатов этого первого поиска. Дополнительный поиск отменяют, если эти измерения удовлетворяют одному или более выбранным критериям "выхода". Местоположение приемника определяют на основании измерений, сделанных в первом поиске.
Если измерения не удовлетворяют выбранным критериям выхода, проводят второй поиск. В одном применении, тогда определяют местоположение объекта на основании измерений из второго поиска, или комбинации первого и второго поисков.
В одном варианте осуществления первый поиск выделяет скорость, нежели точность и чувствительность. Критерии выхода выбирают с целью обеспечения, что измерения, результирующие из первого поиска, достаточны, чтобы определить местоположение объекта на желаемом уровне точности. Второй поиск отменяют, если измерения удовлетворяют этим критериям. Если измерения не удовлетворяют выбранным критериям, то проводят второй поиск. Этот второй поиск выделяет точность и чувствительность, нежели скорость.
В одном варианте осуществления, приемник ищет сигналы, передаваемые GPS спутниками. В этом варианте осуществления, все GPS спутники, которые ищет приемник, определяют "первый набор спутников". Те спутники в первом наборе спутников, для которых значение корреляции равно или заданный "шумовой порог", определяют "второй набор спутников". Те спутники во втором наборе спутников, которые имеют значение корреляции, равное или больше, чем "второй порог", определяют "третий набор спутников". Второй порог выше, чем первый порог. Четвертый набор содержит все спутники из первого набора, но исключает спутники из третьего набора.
В одном варианте осуществления второй поиск отменяют, если все спутники в первом наборе спутников имеют значение корреляции, которое равно или превышает второй порог. То есть, число спутников в третьем наборе спутников равно числу спутников в первом наборе спутников.
Во втором варианте осуществления второй поиск отменяют, если метрика (т.е., коэффициент качества сигнала), определяемая из азимутального угла каждого спутника во втором наборе и отношения пикового сигнала несущей к шуму для каждого такого спутника, превышает заданный порог.
В третьем варианте осуществления второй поиск отменяют, если число спутников во втором наборе равно или превышает заданный порог.
В четвертом варианте осуществления второй поиск отменяют, если отношение пикового сигнала несущей к шуму для каждого из измерений во втором наборе равно или превышает заданный порог.
Пятый вариант осуществления комбинирует два или более из четырех ранее упомянутых вариантов осуществления.
Краткое описание чертежей
Компоненты на фигурах не обязательно сводятся к определенному масштабу. Скорее, акцент делается на показе принципов раскрываемого предмета обсуждения. На фигурах одинаковые ссылочные позиции обозначают одинаковые части.
Фиг.1 - диаграмма GPS системы определения географического местоположения.
Фиг.2 - блок-схема последовательности операций способа для поиска сигналов, полезных в определении местоположения объекта, согласно одному варианту осуществления раскрываемого предмета обсуждения.
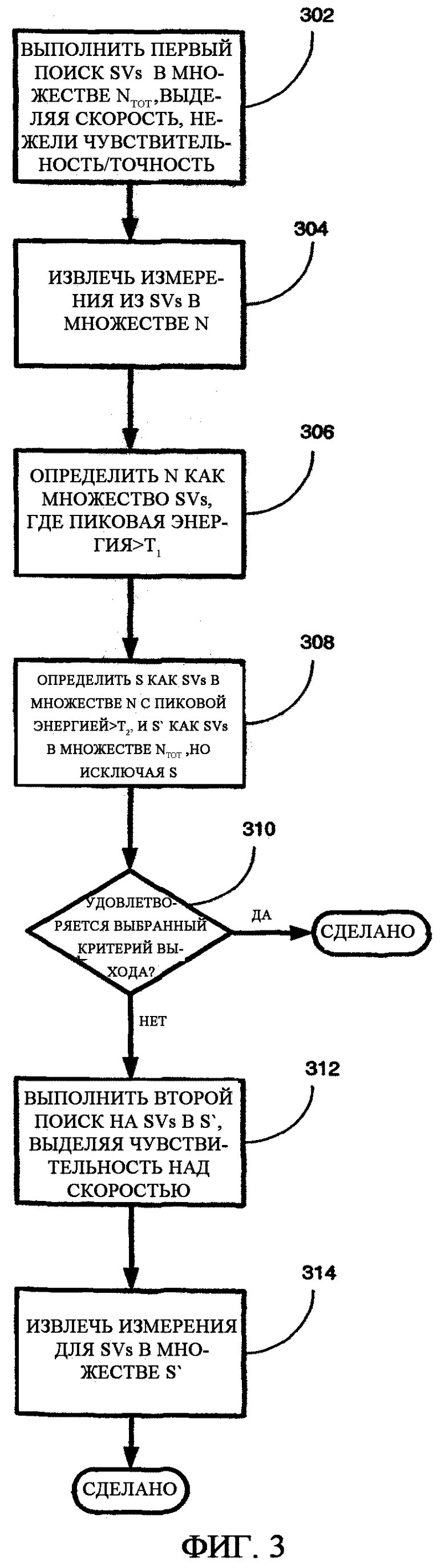
Фиг.3 - блок-схема последовательности операций способа для поиска сигналов, полезных в определении местоположения объекта, в соответствии со вторым вариантом осуществления раскрываемого предмета обсуждения.
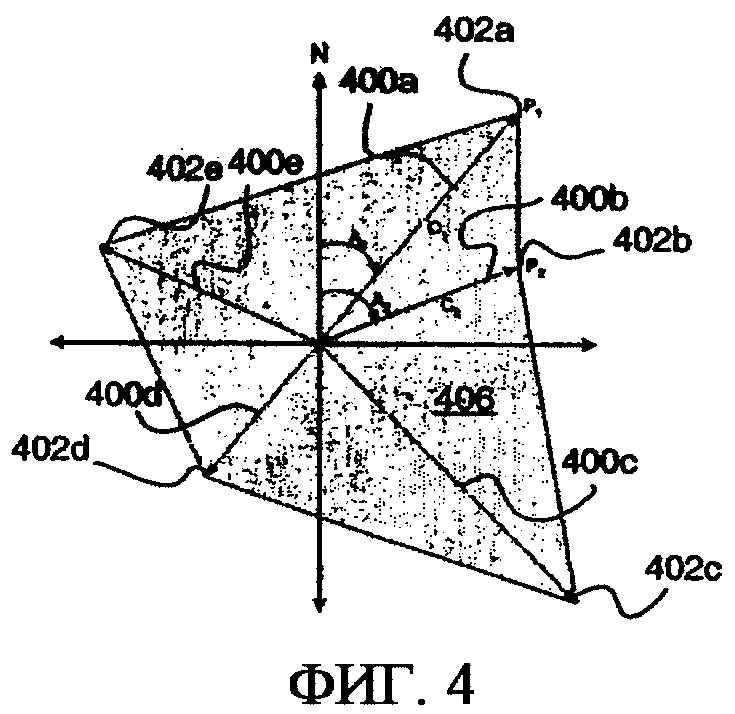
Фиг.4 показывает пример многоугольника, образованного с помощью измерений, извлеченных из начального поиска, где площадь этого многоугольника показывает качество этих измерений.
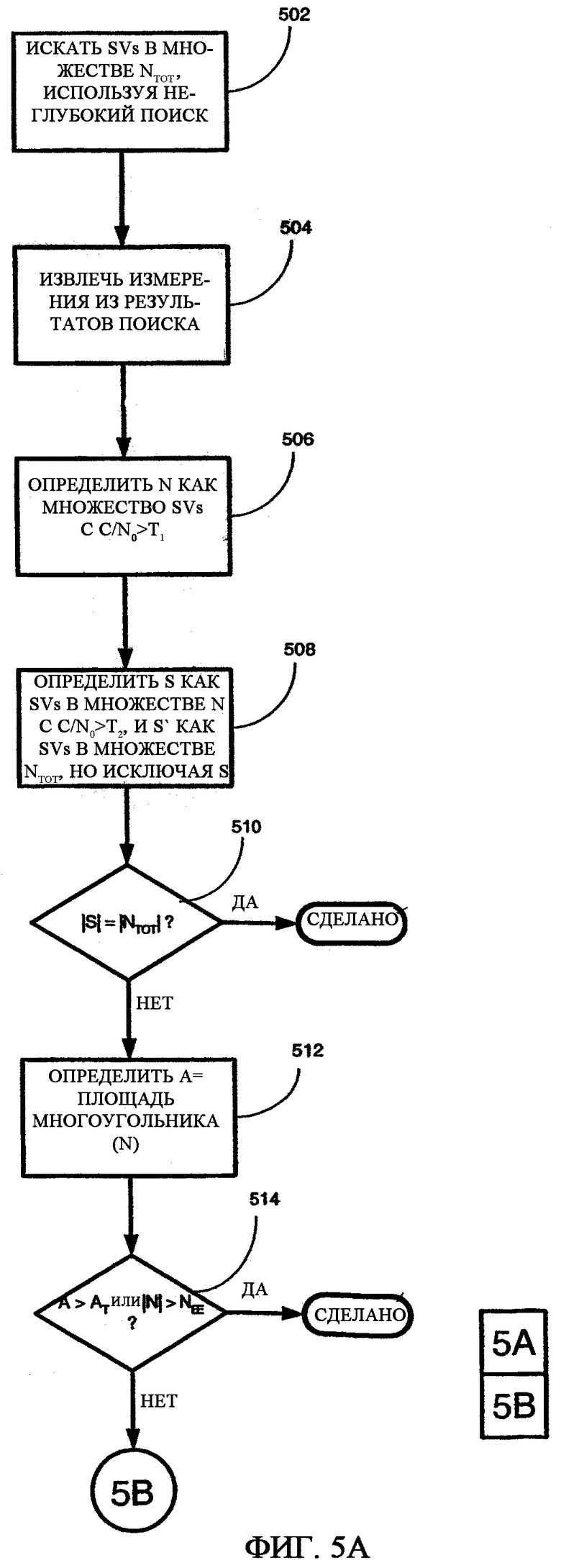
Фиг.5A-5B содержат блок-схему последовательности операций способа для поиска сигналов, полезных в определении местоположения объекта, в соответствии с другим вариантом осуществления раскрываемого предмета обсуждения.
Фиг.6 - блок-схема системы для поиска сигналов, полезных в определении местоположения объекта, в соответствии с одним вариантом осуществления раскрываемого предмета обсуждения.
Фиг.7 - блок-схема абонентской станции в беспроводной системе связи, включающей в себя систему из фиг.6.
Подробное описание
Как здесь используется, предполагается, что термины, такие как "почти" и "по существу", сделают возможной некоторую свободу действий в математической точности, чтобы учитывать допустимые отклонения, которые приемлемы в этой деятельности. Соответственно, любые отклонения вверх или вниз от значения, модифицируемого терминами "почти" или "по существу", в области от 1% до 20%, должны рассматриваться как находящиеся явно внутри области этого указанного значения.
Более того, как здесь используется, термин "программное обеспечение" включает в себя инструкции, используемые, чтобы направлять программируемое устройство выполнять некоторую функцию. Соответственно, программное обеспечение включает в себя, например, такие вещи, как исходный код, объектный код, бинарный код, встроенные программы, макрокоманды, микрокоманды, или любую комбинацию двух или более из вышеупомянутых.
Более того, термин "память" указывает на любой процессорно-читаемый носитель информации, включающий в себя, но не ограниченный этим, RAM, ROM, EPROM, PROM, EEPROM, диск, гибкий диск, магнитный барабан, жесткий диск, CD-ROM, DVD, или подобное, или любую комбинацию двух или более из вышеупомянутого, на котором может храниться программное обеспечение.
Термин "процессор" указывает на любое устройство, способное исполнять программное обеспечение. Соответственно, процессор включает в себя общего или специального назначения микропроцессор, конечный автомат (finite state machine), контроллер, компьютер, цифровой сигнальный процессор (DSP), или подобное.
Термин спутник означает навигационный спутник, такой как GPS спутник.
Фиг.2 это блок-схема последовательности операций способа для поиска сигналов, полезных в определении местоположения объекта, в соответствии с одним вариантом осуществления раскрываемого предмета обсуждения. Этот способ начинается с этапа 200, который содержит проведение первого поиска как часть попытки определения местоположения. От этапа 200 способ переходит на этап 202. На этапе 202 измерения извлекаются из результатов поиска.
От этапа 202 способ переходит на этап 204. Этап 204 определяет, удовлетворяют ли измерения, результирующие из первого поиска, одному или более выбранным критериям "выхода". Если эти измерения удовлетворяют одному или более выбранным критериям выхода, дополнительный поиск внутри упомянутой попытки определения местоположения отменяется. Если эти измерения не удовлетворяют одному или более выбранным критериям выхода, выполняется этап 206. Этап 206 выполняет второй поиск сигналов, полезных в определении местоположения этого объекта.
Второй вариант осуществления способа для поиска сигналов, полезных в определении местоположения объекта, показан на фиг.3. В этом варианте осуществления, способ начинается с этапа 302, который содержит поиск передач от спутников в первом наборе. Этот поиск выделяет скорость, нежели точность и чувствительность.
В одном примере, в котором объект является абонентской станцией в беспроводной системе связи, PDE предоставляет абонентской станции содействующую обнаружению информацию (acquisition assistance information, AAI), показывающую спутники, которые вероятно передают сигналы, которые эта абонентская станция может принимать. Спутники, которые передают сигналы, которые могут приниматься приемником, обычно называются как "спутники в видимости" или "спутники, которые видимы". Эти спутники формируют первый набор спутников. Во втором примере, информация AAI недоступна. Поэтому, первый набор спутников состоит из всех спутников в GPS системе определения географического местоположения. В третьем примере абонентская станция имеет доступ к последнему "альманаху". Альманах - это информация, передаваемая GPS спутником, например, которая показывает местоположение и орбиту спутников в этой GPS совокупности. В дополнение, абонентская станция имеет доступ к приближенному показателю времени и грубому знанию своего собственного местоположения. По этому альманаху, времени и грубому знанию ее местоположения абонентская станция предсказывает, какие спутники для нее видимы. Эти спутники формируют первый набор спутников в этом примере.
От этапа 302 способ переходит на этап 304. На этапе 304 измерения извлекаются из результатов поиска. В одном примере эти измерения содержат отношение сигнала к шуму (signal to noise ratio, SNR) и фазу кода (время) для каждого из различимых пиков корреляционных значений. Боковые лепестки, если обнаруживаются, игнорируются.
Этап 306 следует за этапом 304. На этапе 304 SNR измерения из первого поиска сравниваются с первым шумовым порогом. Первый шумовой порог устанавливается на уровень, который гарантирует, что вероятность ложной сигнализации ниже заданного уровня. Спутники, которые превышают первый шумовой порог, формируют второй набор спутников.
От этапа 306 способ переходит на этап 308. На этапе 308 SNR измерения сравниваются со вторым порогом. Второй порог выше, чем первый. Спутники, которые превышают второй порог, формируют третий набор спутников. Четвертый набор спутников определяется как все спутники в первом наборе спутников, но исключая спутники из второго набора спутников. Соответственно, четвертый набор спутников включает в себя все спутники из первой группы спутников, от которых сигналы принимаются на уровне ниже второго порога.
Этап 310 следует за этапом 308. На этапе 310 измерения обследуются, чтобы определить, удовлетворяют ли они одному или более критериям выхода. Критерии выхода выбираются таким образом, чтобы гарантировать, что качество этих измерений достаточно для определения местоположения объекта с желаемым уровнем точности. Если эти измерения удовлетворяют одному или более из этих выбранных критериев выхода, дополнительный поиск отменяется. Если эти измерения не удовлетворяют одному или более выбранным критериям выхода, выполняется этап 312.
На этапе 312 выполняется второй поиск. Этот второй поиск выделяет точность и чувствительность, скорее чем скорость, и таким образом использует более длительное время интеграции в процессе корреляции (сопоставления), давая в результате более длительное время определения местоположения. Второй поиск проводится только для спутников в четвертом наборе спутников. Как только второй поиск проведен, выполняется этап 314. На этапе 314 измерения сигналов, принятых от спутников в четвертом наборе, извлекаются из результатов поиска. Затем способ заканчивается.
В одном применении, местоположение объекта определяется на основании измерений из первого поиска, если он является единственным выполненным поиском. Если выполняются оба поиска, местоположение объекта определяется на основании измерений из второго поиска, или комбинации первого и второго поиска. В одном примере, где выполняются оба поиска, местоположение объекта определяется на основании измерений для спутников в третьем наборе, результирующих из первого поиска, и измерений для спутников в четвертом наборе, результирующих из второго поиска.
В одной конфигурации эти измерения предоставляются устройству, такому как модуль определения местоположения (position determining entity, PDE), который оценивает местоположение объекта на основании этих измерений. Альтернативно, по этим измерениям объект оценивает свое собственное местоположение.
В одном варианте осуществления второй поиск отменяется, если число спутников в третьем наборе равно числу спутников в первом наборе, показывая, что все спутники, которые искались, удовлетворяют второму порогу.
Во втором варианте осуществления строится многоугольник по измерениям, связанным со спутниками во втором наборе. Для каждого из этих спутников формируется вектор из спутникового азимутального угла и отношения пикового сигнала несущей к шуму. Ориентация этого вектора определяется, базируясь на азимутальном угле (т.е., угле возвышения от горизонта в небо) этого спутника. Величина этого вектора основана на величине отношения пикового сигнала несущей к шуму. Эти векторы располагаются в некоторой системе координат. Конечные точки этих векторов соединяются одна с другой, чтобы определить некоторый многоугольник. В этом варианте осуществления второй поиск отменяется, если площадь этого многоугольника равна или превышает некоторый порог. Следует понимать, что чем больше изменение в азимуте, тем больше площадь этого многоугольника. В дополнение, чем более сильным является каждый сигнал, тем больше площадь этого многоугольника. Поэтому, понятно, что множество спутников, которые распределены по небу и которые имеют сильные сигналы, будет давать в результате многоугольник с наибольшей площадью.
Фиг.4 показывает пример многоугольника, определяемого пятью векторами 400a, 400b, 400c, 400d и 400e. Каждый из этих векторов представляет или соответствует некоторому измерению. Более конкретно, угол между вектором и вертикальной осью это азимутальный угол для спутника, и величина этого вектора это отношение пикового сигнала несущей к шуму. Конечные точки этих векторов идентифицируются с помощью ссылочных позиций 402a, 402b, 402c, 402d и 402e. Многоугольник, который определяется этими конечными точками, идентифицируется с помощью ссылочной позиции 406. Площадь этого многоугольника, которая определяется, используя известные технологии, используется в вышеописанном сравнении.
В третьем варианте осуществления второй поиск отменяется, если число спутников во втором наборе равно или превосходит некоторый порог.
В четвертом варианте осуществления отношение пикового сигнала несущей к шуму для каждого из спутников во втором наборе складывается. Второй поиск отменяется, если эта сумма равна или превосходит некоторый заданный порог.
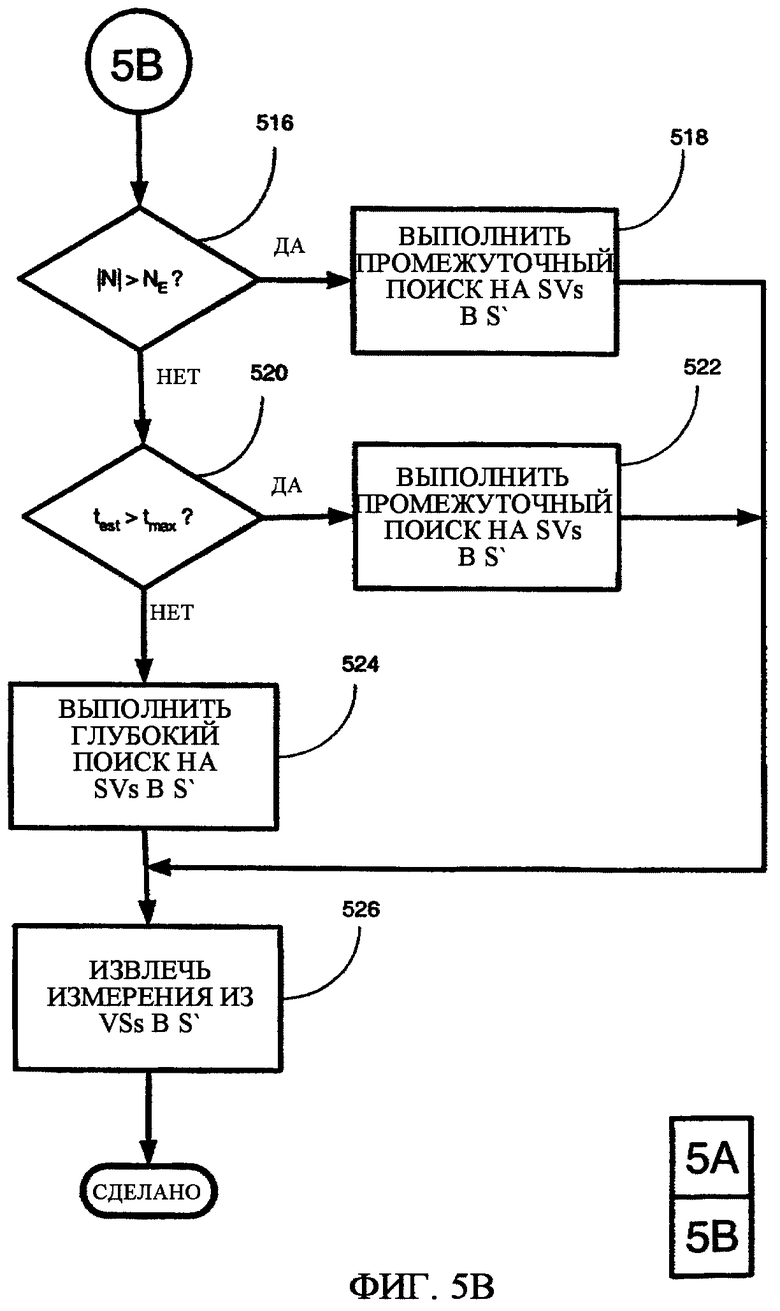
Фиг.5A-5B содержат блок-схему последовательности операций, показывающую пример осуществления способа согласно раскрываемому обсуждаемому предмету поиска сигналов, полезных в определении местоположения объекта.
В этом примере пользователь выбирает один из трех доступных вариантов выбора, причем каждый определяет компромисс между временем определения местоположения и точностью/чувствительностью. Первый вариант выбора предоставляет наилучшее время определения местоположения. Второй вариант выбора предоставляет следующее лучшее время определения местоположения, но также предоставляет лучшие точность и чувствительность, чем первый вариант выбора. Третий вариант выбора предоставляет лучшие точность и чувствительность, но наихудшее время определения местоположения из этих трех.
Способ начинается с этапа 502, который содержит поиск и местонахождение передач от спутников в первом наборе. На этом этапе выполняется неглубокий поиск. Неглубокий поиск определяется здесь как тот, что выделяет скорость, нежели точность и чувствительность. В одном примере, параметры поиска для неглубокого поиска определяют время полной интеграции равным 80 мс, время когерентной интеграции равным 20 мс и число когерентных интеграций, которые не когерентно скомбинированы, равным 4.
От этапа 502 способ переходит на этап 504. На этапе 504 измерения извлекаются из результатов поиска. В одном примере, эти измерения содержат отношение пикового сигнала несущей к шуму и временной сдвиг кода для каждого из различимых пиков.
Этап 506 следует за этапом 504. На этапе 506 измерения сравниваются с заданным шумовым порогом. Те спутники, где отношение пикового сигнала несущей к шуму превышает этот заданный шумовой порог, формируют второй набор.
В одном примере, этот шумовой порог зависит от параметров поиска. Для неглубокого поиска, шумовой порог устанавливается на 25,0 дБ-Гц. Для промежуточного поиска, который будет обсуждаться в отношении этапов 518 и 522, этот шумовой порог устанавливается 18,1 дБ-Гц. Для глубокого поиска, который будет обсуждаться в отношении этапа 524, этот шумовой порог устанавливается на 14,0 дБ-Гц.
Этап 508 следует за этапом 506. На этапе 508 измерения сравниваются со вторым порогом. Второй порог выше, чем первый. Третий набор определяется как те спутники в первом наборе, которые удовлетворяют второму порогу. Четвертый набор определяется как те спутники в первом наборе, но исключая S.
В одном примере, второй порог изменяется с вариантом выбора времени определения местоположения против точности/чувствительности, выбираемым пользователем. В одной конфигурации, второй порог для первого, второго и третьего вариантов выбора соответственно устанавливается на 29,4 дБ-Гц, 32,4 дБ-Гц и  . Последнее указывает на установку, которая так велика, что второй порог никогда не будет удовлетворен.
. Последнее указывает на установку, которая так велика, что второй порог никогда не будет удовлетворен.
Этап 510 следует за этапом 508. На этапе 510, |S|, число спутников в третьем наборе сравнивается с |NТОТ|, числом спутников в первом наборе. Если |S| равно |NТОТ|, показывая, что все спутники, искавшиеся на этапе 502, удовлетворяют второму порогу, способ завершается. Если нет, способ переходит на этап 512.
На этапе 512 многоугольник, описанный ранее в отношении фиг.4, формируется из измерений для спутников во втором наборе, и определяется площадь A этого многоугольника.
Этап 514 следует за этапом 512. На этапе 514 площадь A многоугольника сравнивается с пороговой площадью AТ. В дополнение, |N|, число спутников во втором наборе сравнивается с порогом NЕЕ. Если площадь A превосходит AТ или |N| превосходит N , способ завершается. Иначе, способ продолжается на этапе 516 на фиг.5B.
, способ завершается. Иначе, способ продолжается на этапе 516 на фиг.5B.
В одном примере пороговая площадь AТ и пороговое число N изменяются с порогом времени определения местоположения против точности/чувствительности, выбираемым пользователем. В одной конфигурации, пороговая площадь AТ для первого, второго и третьего вариантов выбора соответственно устанавливается на 4×10 , 6×10
, 6×10 и
и  . Последнее указывает на установку, которая так велика, что этот порог никогда не удовлетворяется. В дополнение, пороговое число NЕЕ для первого, второго и третьего вариантов выбора соответственно устанавливается на 4, 5 и
. Последнее указывает на установку, которая так велика, что этот порог никогда не удовлетворяется. В дополнение, пороговое число NЕЕ для первого, второго и третьего вариантов выбора соответственно устанавливается на 4, 5 и  . Снова, последнее указывает на установку, которая так велика, что этот порог никогда не удовлетворяется.
. Снова, последнее указывает на установку, которая так велика, что этот порог никогда не удовлетворяется.
На этапе 516, |N|, число спутников во втором наборе сравнивается со вторым пороговым числом NЕ. Если |N| превосходит NЕ, выполняется этап 518. Иначе, способ продолжается на этапе 520.
В одном примере второе пороговое число NЕ изменяется с вариантом выбора времени определения местоположения против точности/чувствительности, выбираемым пользователем. В одной конфигурации значение N для первого, второго и третьего вариантов выбора соответственно устанавливается на 5, 5 и . Последнее показывает установку, которая так велика, что этот порог никогда не удовлетворяется.
На этапе 518 выполняется промежуточный поиск на спутниках в четвертом наборе. Промежуточный поиск определяется как тот, что выделяет точность и чувствительность, нежели скорость, но делает так в меньшей степени, чем глубокий поиск. От этапа 518 способ переходит на этап 526.
В одном примере промежуточный поиск характеризуется временем полной интеграции равным 880 мс, временем когерентной интеграции равным 20 мс и числом когерентных интеграций, которые не когерентно скомбинированы, равным 44. Следует понимать, что эти значения предоставляются только как примеры значений, которые могут использоваться, и не должно предполагаться, что они имеют какое-либо специальное значение.
На этапе 520 оценивается время, требуемое для выполнения глубокого поиска на спутниках в четвертом наборе. Это время сравнивается с максимальным доступным временем. Если оценка превосходит это максимальное время, показывая, что имеется недостаточное время, чтобы провести глубокий поиск, способ переходит на этап 522. Иначе, способ продолжается на этапе 524.
В одном примере временная оценка основана на рассмотрениях качества услуги. Во втором примере, включающем в себя поиск, инициируемый модулем PDE или ограничивающийся мобильным устройством, такой как тот, что начинается при вызове 911 абонентской станцией в системе, согласующейся с IS-801, максимальное время это значение качества предпочтительного ответа (Preferred Response Quality, PRQ), определяемое модулем PDE. В третьем примере для поиска, инициируемого мобильным устройством, такого как тот, что включает в себя поиск, основанный на Интернет географии, инициируемый абонентской станцией, это максимальное время назначается этой абонентской станцией.
На этапе 522 выполняется промежуточный поиск на спутниках в четвертом наборе. Этот промежуточный поиск был описан ранее в связи с этапом 518. От этапа 522 способ переходит на этап 526.
На этапе 524 выполняется глубокий поиск для спутников в четвертом наборе. Глубокий поиск определяется как тот, который выделяет точность и чувствительность, нежели скорость, и делает так в большей степени, чем промежуточный поиск.
В одном примере глубокий поиск характеризуется временем полной интеграции равным 1760 мс, временем когерентной интеграции равным 80 мс и числом когерентных интеграций, которые не когерентно скомбинированы, равным 22. Эти значения должны пониматься как предоставляемые в качестве примеров и не должны рассматриваться, как имеющие какое-либо конкретное значение.
В одной конфигурации, так как время когерентной интеграции превосходит временной период 20 мс, за который бит данных модулируется в спутниковый сигнал, когерентная интеграция в глубоком поиске выполняется с поддержкой чувствительности от PDE, чтобы вычислять фазовые изменения, которые происходят внутри этого 80 мс времени когерентной интеграции.
От этапа 524 способ переходит на этап 526. На этапе 526 извлекаются измерения для спутников в четвертом наборе. Способ затем заканчивается.
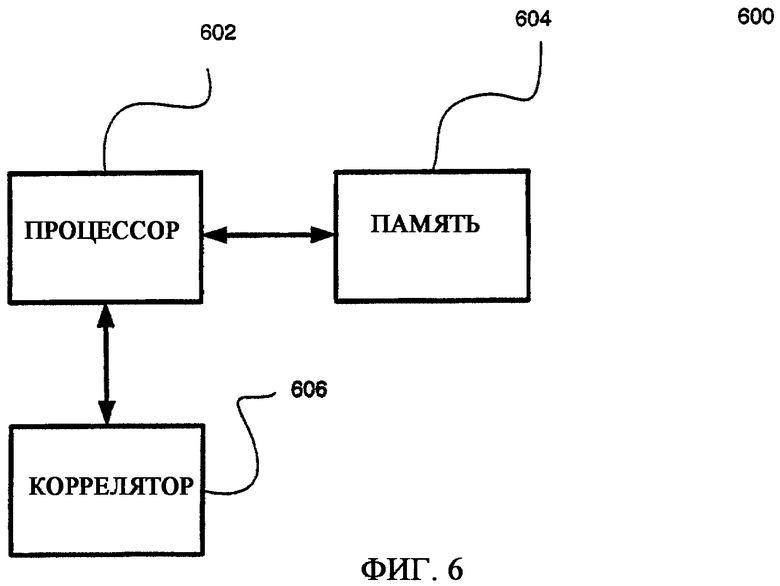
Вариант осуществления системы 600 для поиска сигналов, полезных в определении местоположения объекта, показан на фиг.6. Как показано, система 600 содержит процессор 602, память 604 и коррелятор 606.
Коррелятор 606 конфигурируется, чтобы производить корреляционные функции из сигналов, предоставляемых ему приемником (не показан). Коррелятор 606 предоставляет корреляционные функции процессору 602 либо напрямую, либо через память 604. Коррелятор 606 может быть реализован в аппаратном обеспечении, программном обеспечении, или комбинации аппаратного обеспечения и программного обеспечения.
Память 604 материально реализует ряд программных инструкций для выполнения любого из способов из фиг.2, 3 или 5A-5B, или любого из вариантов осуществления, реализаций, или примеров, здесь описанных или предложенных.
Процессор 602 конфигурируется, чтобы обращаться к программным инструкциям и исполнять программные инструкции, материально осуществляемые памятью 604. Через исполнение этих инструкций процессор 602 направляет коррелятор 606 выполнять первый поиск сигналов, полезных в определении местоположения объекта. Затем процессор 602 извлекает измерения из результирующей корреляционной функции, предоставляемой ему коррелятором 606. Затем процессор определяет, удовлетворяют ли эти извлеченные измерения одному или более выбранным критериям выхода. Если это так, процессор 602 завершает поиск. Если нет, процессор 602 направляет коррелятор 606 выполнять второй поиск сигналов, полезных в определении местоположения объекта.
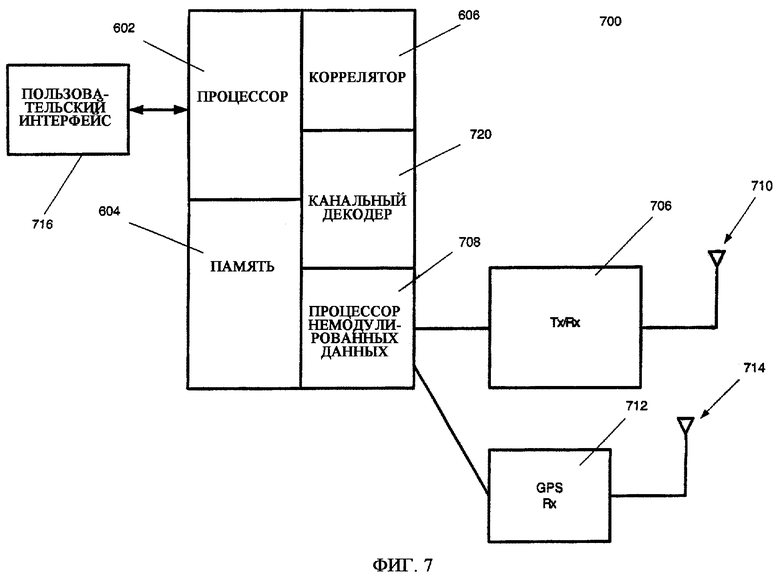
Вариант осуществления абонентской станции 700 в беспроводной системе связи показан на фиг.7. Эта конкретная абонентская станция 700 конфигурируется, чтобы осуществлять или включать в себя систему 600 из фиг.6.
Радио приемопередатчик 706 конфигурируется, чтобы модулировать немодулированную (baseband) информацию, такую как речь или данные, в RF несущую, и демодулировать модулированную RF несущую, чтобы получить немодулированную информацию.
Антенна 710 конфигурируется, чтобы передавать модулированную RF несущую через беспроводной канал связи и принимать модулированную RF несущую через беспроводной канал связи.
Процессор 708 немодулированных данных (Baseband processor) конфигурируется, чтобы предоставлять немодулированную информацию от процессора 602 к приемопередатчику 706 для передачи через беспроводной канал связи. Процессор 602 в свою очередь получает немодулированную информацию из устройства ввода внутри пользовательского интерфейса 716. Процессор 708 немодулированных данных также конфигурируется, чтобы предоставлять немодулированную информацию от приемопередатчика 706 к процессору 602. Процессор 602 в свою очередь предоставляет эту немодулированную информацию устройству вывода внутри пользовательского интерфейса 716.
Пользовательский интерфейс 716 содержит множество устройств для ввода или вывода пользовательской информации, такой как голос или данные. Устройства, обычно содержащиеся внутри пользовательского интерфейса, включают в себя клавиатуру, отображающий экран, микрофон и громкоговоритель.
GPS приемник 712 конфигурируется, чтобы принимать и демодулировать GPS спутниковые передачи и предоставлять эту демодулированную информацию коррелятору 606.
Коррелятор 606 конфигурируется, чтобы выводить GPS корреляционные функции из информации, предоставляемой ему GPS приемником 712. Для данного PN кода, коррелятор 606 производит корреляционную функцию, определенную над областью временных сдвигов кода, которые определяют поисковое окно. Каждая индивидуальная корреляция (сопоставление) выполняется в соответствии с определенными когерентными и некогерентными интеграционными параметрами.
Коррелятор 606 также конфигурируется, чтобы выводить относящиеся к управлению корреляционные функции из информации, относящейся к управляющим сигналам, предоставляемым ему приемопередатчиком 706. Абонентская станция 700 использует эту информацию, чтобы получать беспроводные услуги связи.
Канальный декодер 720 конфигурируется, чтобы декодировать канальные символы, предоставляемые ему процессором 708 немодулированных данных, в подлежащие исходные биты. В одном примере, в котором канальные символы являются сверточно закодированными символами, канальный декодер является декодером Витерби (Viterbi decoder). Во втором примере, в котором канальные символы являются последовательными или параллельными конкатенациями сверточных кодов, канальный декодер 720 является турбодекодером.
Память 604 конфигурируется, чтобы содержать программные инструкции, осуществляющие любой из способов из фиг.2, 3, 5A-5B, или любые из вариантов осуществления, реализаций или примеров оттуда, которые были описаны или предложены.
Процессор 602 конфигурируется, чтобы обращаться к программным инструкциям и исполнять эти программные инструкции. Через исполнение этих программных инструкций процессор 602 анализирует GPS корреляционные функции, предоставляемые ему коррелятором 606, извлекает измерения из пиков оттуда и определяет, может ли местоположение абонентской станции 700 быть определено на основании этих измерений, или требуется ли поиск, чтобы определить местоположение этого объекта.
Процессор 602 также конфигурируется, чтобы определять среднеквадратическую ошибку (RMSE), связанную с каждым из этих измерений. Эти измерения и значения ошибки RMSE предоставляются модулю PDE (не показан). PDE взвешивает каждое из этих измерений, на основании инверсии его соответствующего RMSE значения, и затем оценивает местоположение абонентской станции 700 на основании этих взвешенных измерений. Альтернативно, абонентская станция 700 определяет свое собственное местоположение по этой информации.
Пока описывались различные осуществления, реализации и примеры, специалисты в данной области техники заметят, что дополнительные варианты осуществления, реализации и примеры, которые не были явно раскрыты, находятся внутри объема заявляемого изобретения. В частности, возможны варианты осуществления, где заявляемое изобретение применяется, чтобы извлекать измерения, полезные в определении местоположения объекта, из передач базовой станции, или комбинаций передач базовой станции и GPS спутников. Следовательно, это изобретение не должно быть ограничено, кроме как прилагаемой формулой изобретения.
Изобретение относится к области определения местоположения, а в частности, к процедурам поиска сигналов, полезных в процессе определения местоположения, извлечения измерений из этих сигналов, и определения местоположения объекта на основании этих измерений. Достигаемым техническим результатом изобретения является увеличение точности определения местоположения. Результат достигается за счет того, что первый поиск выполняется как часть попытки определения местоположения, и измерения извлекаются из получаемых результатов поиска. Дополнительный поиск в рамках этой попытки определения местоположения отменяется, если эти измерения удовлетворяют одному или более выбранным критериям выхода. Однако проводится второй поиск, если эти измерения не удовлетворяют одному или более выбранным критериям выхода. 4 н. и 6 з.п. ф-лы, 8 ил.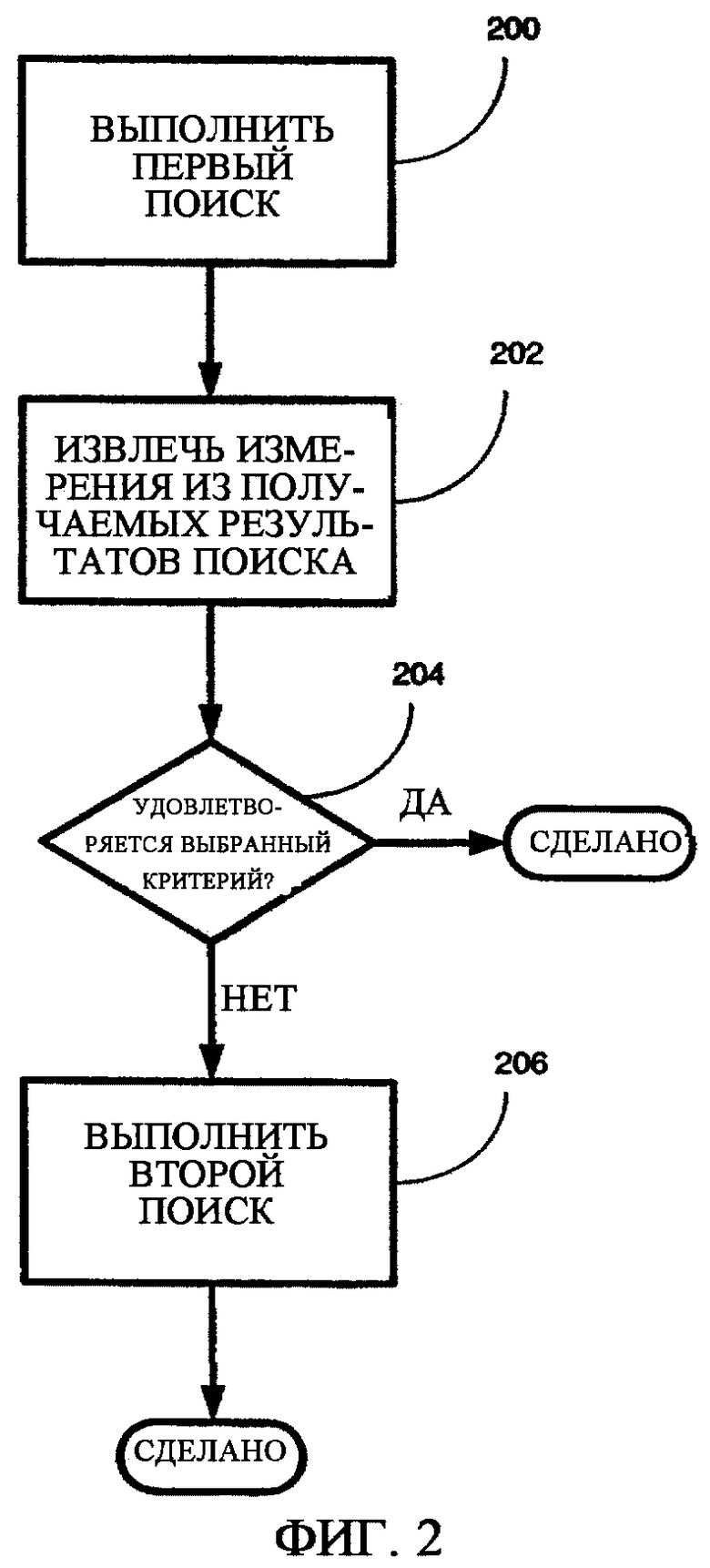
выполняют первый поиск сигналов, полезных в определении местоположения объекта, как часть попытки определения местоположения,
причем этот первый поиск включает в себя поиск спутников в первом наборе;
извлекают одно или более измерений из получаемых результатов поиска;
определяют, удовлетворяют ли эти измерения одному или более выбранным критериям выхода;
отменяют дополнительный поиск в рамках этой попытки определения местоположения, если измерения удовлетворяют одному или более выбранным критериям выхода; и
выполняют второй поиск сигналов, полезных в определении местоположения объекта, если измерения не удовлетворяют одному или более выбранным критериям выхода, причем те спутники в первом наборе, сигналы которых удовлетворяют заданному первому шумовому порогу, формируют второй набор, те спутники в первом наборе, сигналы которых удовлетворяют второму шумовому порогу, формируют третий набор, спутники в первом наборе, но исключая третий набор, формируют четвертый набор, и второй поиск отменяют, если число спутников в третьем наборе равно числу спутников в первом наборе.
выполняют первый поиск сигналов, полезных в определении местоположения объекта, как часть попытки определения местоположения,
причем этот первый поиск включает в себя поиск спутников в первом наборе;
извлекают одно или более измерений из получаемых результатов поиска, причем эти измерения содержат отношение пикового сигнала несущей к шуму и фазу кода для каждого из различимых пиков;
определяют, удовлетворяют ли эти измерения одному или более выбранным критериям выхода;
отменяют дополнительный поиск в рамках этой попытки определения местоположения, если измерения удовлетворяют одному или более выбранным критериям выхода; и
выполняют второй поиск сигналов, полезных в определении местоположения этого объекта, если измерения не удовлетворяют одному или более выбранным критериям выхода, причем те спутники в первом наборе, сигналы которых удовлетворяют заданному первому шумовому порогу, формируют второй набор, те спутники в первом наборе, сигналы которых удовлетворяют второму шумовому порогу, формируют третий набор, спутники в первом наборе, но исключая третий набор, формируют четвертый набор, и суммируют отношение пикового сигнала несущей к шуму для каждого из этих измерений во втором наборе, и второй поиск отменяют, если эта сумма равна или превосходит некоторый заданный порог.
выполняют первый поиск сигналов, полезных в определении местоположения этого объекта, как часть попытки определения местоположения, причем этот первый поиск включает в себя поиск спутников в первом наборе;
извлекают одно или более измерений из получаемых результатов поиска;
определяют, удовлетворяют ли эти измерения одному или более выбранным критериям выхода;
отменяют дополнительный поиск в рамках этой попытки определения местоположения, если измерения удовлетворяют одному или более выбранным критериям выхода; и
выполняют второй поиск сигналов, полезных в определении местоположения объекта, если измерения не удовлетворяют одному или более выбранным критериям выхода, причем те спутники в первом наборе, сигналы которых удовлетворяют заданному первому шумовому порогу, формируют второй набор, те спутники в первом наборе, сигналы которых удовлетворяют второму шумовому порогу, формируют третий набор, спутники в первом наборе, но исключая третий набор, формируют четвертый набор, и второй поиск ограничивают этими спутниками в четвертом наборе.
выполняют первый поиск сигналов, полезных в определении местоположения этого объекта, как часть попытки определения местоположения;
извлекают одно или более измерений из получаемых результатов поиска;
определяют, удовлетворяют ли эти измерения одному или более выбранным критериям выхода;
отменяют дополнительный поиск в рамках этой попытки определения местоположения, если измерения удовлетворяют одному или более выбранным критериям выхода; и
выполняют второй поиск сигналов, полезных в определении местоположения объекта, если измерения из первого поиска не удовлетворяют одному или более выбранным критериям выхода, причем этот первый поиск включает в себя поиск спутников в первом наборе, при этом те спутники в первом наборе, сигналы которых удовлетворяют заданному первому шумовому порогу, формируют второй набор, те спутники в первом наборе, сигналы которых удовлетворяют второму шумовому порогу, формируют третий набор, и спутники в первом наборе, но исключая спутники из третьего набора, формируют четвертый набор, и второй поиск отменяют, если число спутников в третьем наборе равно числу спутников в первом наборе.
| US 6133873 А, 17.10.2000 | |||
| ПРИЕМНИК СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1997 |
|
RU2118054C1 |
| WO 02059639 A, 01.08.2002 | |||
| Триметильцикло гепт ена-Миды КиСлОТ фОСфОРА,ОблАдАющиЕ гЕРбицидНОйАКТиВНОСТью, и СпОСОб иХ пОлучЕНия | 1977 |
|
SU635728A1 |
| RU 98108445 А, 10.05.2000. | |||

