Область техники, к которой относится изобретение
Настоящее изобретение относится к области определения местоположения и системам геолокации GPS и более конкретно к способам поиска сигналов определения местоположения с использованием режимов поиска с разной чувствительностью и временем фиксации.
Уровень техники
Система геолокации GPS - это система спутников, обращающихся на околоземной орбите, с помощью которых объекты, видимые для спутников, могут определять свое местоположение. Каждый спутник передает сигнал, помеченный повторяющимся псевдослучайным шумовым (ПШ) кодом из 1023 элементов сигнала (иначе называемых "чипами"), уникально идентифицирующим данный спутник. Эти 1023 чипа повторяются каждую миллисекунду. Сигнал также модулируется битами данных, где каждый бит данных имеет продолжительность 20 мс в модулированном сигнале.
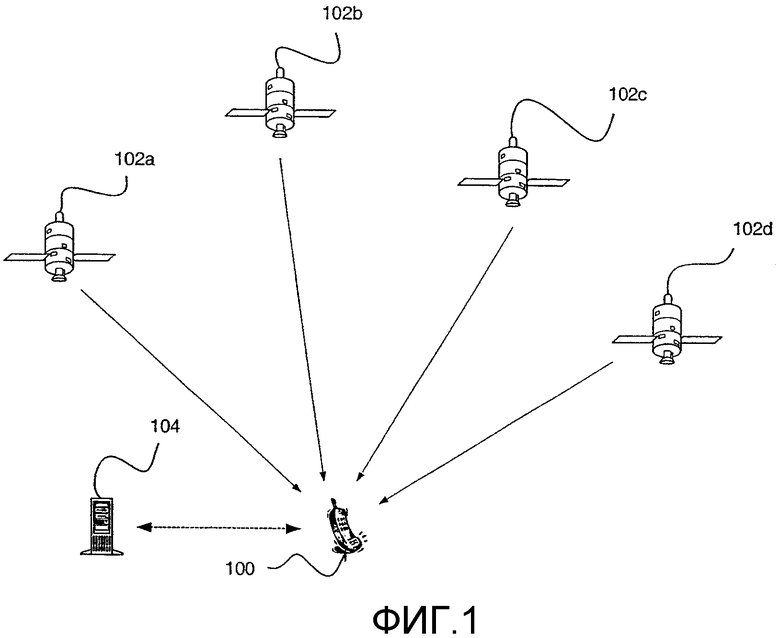
На фиг.1 проиллюстрировано применение системы геолокации GPS, в которой абонентская станция 100 в системе беспроводной связи принимает передачи со спутников 102а, 102b, 102с, 102d, видимых для станции, и извлекает измерения времени из четырех или более передач. Станция передает эти измерения в узел определения местоположения (УОМ) 104, который определяет местоположение станции из этих измерений. Альтернативно абонентская станция 100 может сама определять собственное местоположение на основании этой информации.
Абонентская станция 100 осуществляет поиск передачи от конкретного спутника путем корреляции ПШ кода для данного спутника с принятым сигналом. Принятый сигнал обычно представляет собой совокупность передач от одного или более спутников, видимых для приемника станции, в присутствии шума. Корреляцию выполняют в интервале гипотез кодовой фазы, известном как окно поиска кодовой фазы, WCP, и в интервале гипотез доплеровской частоты, известном как окно доплеровского поиска, WDOPP. Гипотезы кодовой фазы обычно представлены как интервал сдвигов ПШ кода, а гипотезы доплеровской частоты обычно представлены как элементы разрешения по доплеровской частоте.
Каждую корреляцию выполняют в течение времени интеграции I, которое может быть выражено как произведение Nc и М, где Nc - время когерентной интеграции, а М - количество когерентных интеграций, объединенных некогерентно.
Для конкретного ПШ кода корреляционные значения связывают с соответствующими сдвигами ПШ кода и элементом разрешения по доплеровской частоте, чтобы определить двухмерную корреляционную функцию. Определяют положение любых пиков корреляционной функции и сравнивают их с заданным шумовым порогом. Этот порог определяют так, чтобы вероятность ложной тревоги, т.е. вероятность ложного определения спутниковой передачи, была равна заданному значению или была ниже его. Измерение времени для спутника получают из местоположения самого раннего непобочного максимума по размеру кодовой фазы, который равен данному порогу или превосходит его. Доплеровское измерение для абонентской станции можно вывести из местоположения самого раннего непобочного максимума вдоль измерения доплеровской частоты, который равен упомянутому порогу или превосходит его.
Современные архитектуры абонентской станции налагают существенные ограничения на процесс поиска сигналов определения местоположения. Например, в совместно используемой РЧ архитектуре основные электронные РЧ схемы абонентской станции используются совместно трактом приема определения местоположения GPS и трактами передачи и приема речи/данных. Соответственно, время, в течение которого абонентская станция выполняет функцию определения местоположения GPS, отрицательно сказывается на возможности абонентской станции выполнять функцию передачи речи/данных. Для уменьшения этого влияния до приемлемых уровней время настройки на частоту GPS, т.е. время, в течение которого абонентская станция настраивается на частоту GPS для выполнения функции определения местоположения GPS, обычно ограничено заданным периодом, например, 1 или 2 секундами.
Из-за упомянутых выше ограничений и широкого динамического диапазона, обычно имеющегося у сигналов определения GPS, трудно осуществить поиск сигналов определения местоположения за выделенное время и при этом достичь точной фиксации местоположения. Если поиск выполнен за заданный период времени, то полученная фиксация местоположения часто бывает неточной. Если же фиксация в результате поиска выполнена точно, то выделенное время часто превышается.
Раскрытие изобретения
Предложен способ поиска сигналов определения местоположения с использованием нескольких режимов поиска с постепенно возрастающей чувствительностью. В первом варианте несколько режимов поисков включают в себя, по порядку возрастания чувствительности, режим первого уровня, режим второго уровня и по меньшей мере один режим более высокого уровня. В этом варианте способ начинается с определения, не превышает ли какой-нибудь из параметров окна поиска заданные пределы. Если это так, то выполняют поиск первого уровня и уточняют параметры окна поиска на основании полученных результатов поиска таким образом, чтобы они находились в заданных пределах. Если ни один из параметров окна поиска не превышает заданные пределы, то поиск первого уровня не выполняют.
Затем выполняют поиск второго уровня как часть попытки фиксации местоположения. Извлекают измерения из полученных результатов поиска. Если измерения удовлетворяют одному или более выбранным критериям достаточности измерений, то дополнительный поиск в попытке фиксации местоположения не проводят.
Если измерения не удовлетворяют одному или более выбранным критериям достаточности измерения, то проводят поиск более высокого уровня, чем второй уровень. В одном варианте делают выбор между поиском третьего уровня и поиском четвертого уровня на основании заданных критериев выбора. В одном варианте воплощения, если критерии удовлетворены, то проводят поиск третьего уровня, а если критерии не удовлетворены, то проводят поиск четвертого уровня.
Во втором варианте несколько режимов поиска включают в себя, по порядку возрастания чувствительности, режим первого уровня, режим второго уровня и режим третьего уровня. В этом варианте способ начинается с выполнения поиска первого уровня как части попытки фиксации местоположения.
Затем извлекают одно или более измерений из полученных результатов поиска. Принимают решение, удовлетворяют ли измерения одному или более выбранным критериям достаточности измерений.
Если измерения удовлетворяют одному или более выбранным критериям достаточности измерения, то дополнительный поиск в попытке фиксации местоположения не проводят.
Если измерения не удовлетворяют одному или более выбранным критериям достаточности измерений, то выполняют поиск более высокого уровня, чем первый уровень. В этом варианте поиск более высокого уровня является либо поиском второго уровня, либо поиском третьего уровня в зависимости от одного или более заданных критериев выбора.
Также предложены запоминающие устройства для воплощения описанных выше способов. Аналогично предложены системы, связанные с описанными выше способами.
Краткое описание чертежей
Элементы, изображенные на чертежах, не обязательно соответствуют масштабу, так как основное внимание уделено иллюстрации принципов изобретения. На всех чертежах соответствующие детали обозначены одинаковыми ссылочными номерами.
Фиг.1 изображает схему системы геолокации GPS,
фиг.2 изображает алгоритм выполнения варианта предложенного способа поиска сигналов определения местоположения с использованием нескольких режимов поиска с постепенно возрастающей чувствительностью,
фиг.3 иллюстрирует примерный многоугольник, построенный по измерениям, полученным при поиске уровня 1,
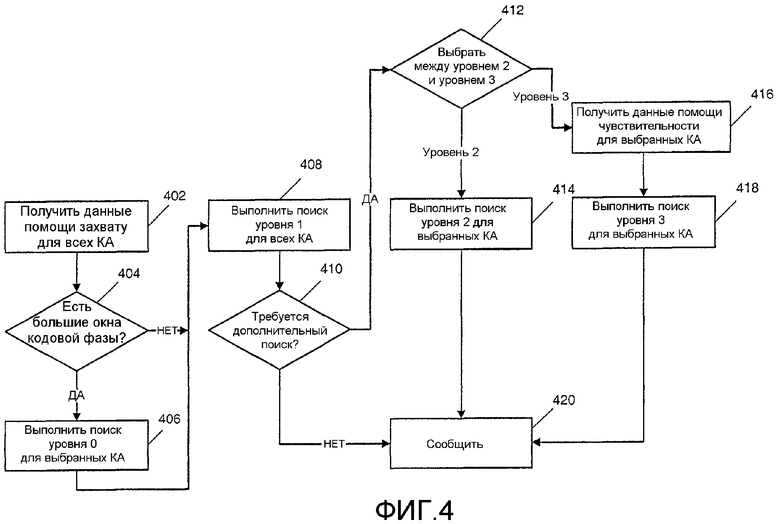
фиг.4 изображает алгоритм примерного варианта реализации предложенного способа поиска сигналов определения местоположения с использованием нескольких поисков с постепенно возрастающей чувствительностью, включающих в себя, по порядку возрастания чувствительности, режимы поиска уровня 0, уровня 1, уровня 2 и уровня 3,
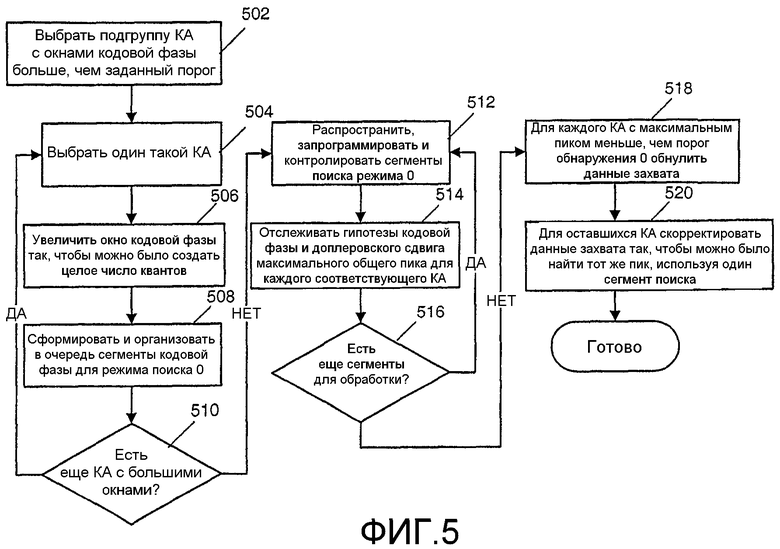
фиг.5 изображает алгоритм выполнения поиска уровня 0 в варианте воплощения на фиг.4,
фиг.6 изображает алгоритм выполнения поиска уровня 1 в варианте воплощения на фиг.4,
фиг.7 изображает алгоритм выполнения поиска уровня 2 в варианте воплощения на фиг.4,
фиг.8 изображает алгоритм выполнения поиска уровня 3 в варианте воплощения на фиг.4,
фиг.9 изображает алгоритм определения критериев достаточности измерений, использованный в поиске уровня 1 на фиг.6,
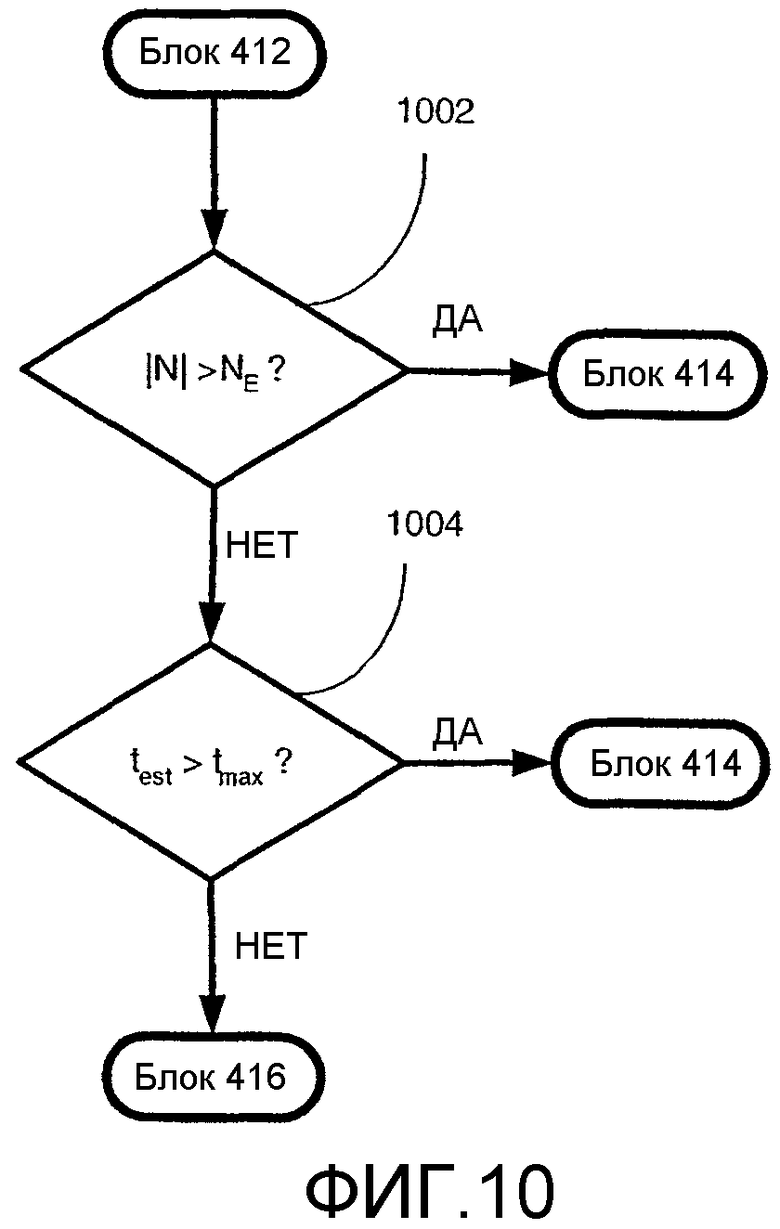
фиг.10 изображает алгоритм определения критериев выбора уровня 2/уровня 3, использованный в примере реализации на фиг.4,
фиг.11 изображает таблицу, идентифицирующую параметры, управляющие режимами поиска уровня 0, уровня 1, уровня 2 и уровня 3 в примерном варианте реализации по фиг.4,
фиг.12А-12В иллюстрируют процедуру сегментации, использованную в примере реализации по фиг.4, в которой двухмерную область, в которой следует проводить поиск спутника GPS, делят на множество сегментов, каждый из которых характеризуется интервалом доплеровских частот и интервалом кодовых фаз,
фиг.13 изображает схематический вид предложенной системы для поиска сигналов определения местоположения с использованием нескольких режимов поиска с постепенно возрастающей чувствительностью,
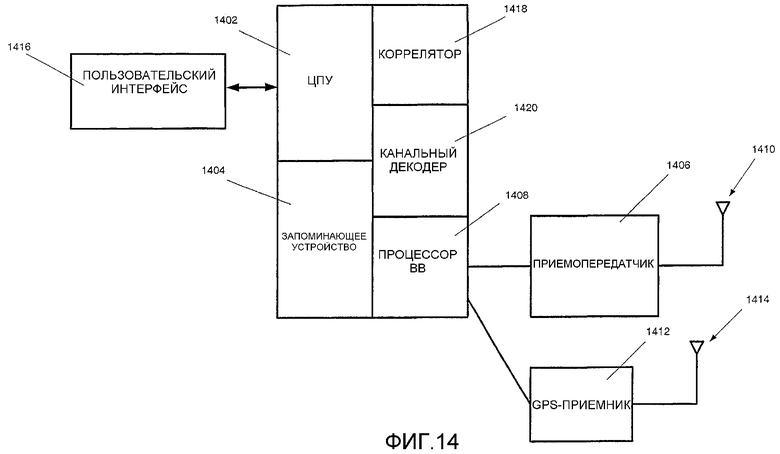
фиг.14 изображает вариант выполнения абонентской станции, содержащей систему по фиг.13.
Осуществление изобретения
Использованные в данном контексте термины "около" и "по существу" допускают некоторую свободу математической точности, чтобы учесть допуски, принятые в данной области. Соответственно, любые отклонения вверх или вниз от значения, модифицированного терминами "около" или "по существу", в интервале 1-20% следует рассматривать как явно подпадающие под объем указанного значения.
Кроме того, в данном контексте термин "программное обеспечение" включает в себя исходный код, код языка ассемблера, бинарный код, программно-аппаратные средства, макрокоманды, микрокоманды или т.п. или любую комбинацию двух или более вышеперечисленных видов.
Термин "запоминающее устройство" относится к любой машиночитаемой среде, включая, без ограничения перечисленным, ОЗУ, ПЗУ, ЭППЗУ, ППЗУ, ЭСПЗУ, диск, гибкий диск, жесткий диск, CD-ROM, DVD и т.п. или любую комбинацию двух или более перечисленных видов, на которой можно хранить серии программных команд, исполняемых процессором.
Термины "процессор" и "ЦПУ" относятся к любому устройству, способному исполнять серии команд, и включает в себя, без ограничения перечисленным, универсальный или специализированный микропроцессор, конечный автомат, контроллер, компьютер, процессор цифровых сигналов (ПЦС) и т.п.
Термин "космический аппарат" и его сокращение "КА" обозначают спутник GPS.
На фиг.2 изображен алгоритм выполнения предложенного способа поиска сигналов определения местоположения с использованием нескольких режимов поиска с постепенно возрастающей чувствительностью, включающих в себя, по порядку возрастания чувствительности, режим уровня 0, режим уровня 1 и по меньшей мере еще один режим более высокого уровня. В основу данного конкретного варианта и связанных с ним вариантов, показанных на фиг.4-10, положены временные ограничения, налагаемые совместно используемой РЧ архитектурой на время, в течение которого абонентской станции разрешено настраиваться на частоту GPS, однако следует понимать, что изобретение этим не ограничено и охватывает также применение двойных (т.е. не используемых совместно) РЧ архитектур, на которые не налагаются такие ограничения.
В одном примере способ выполняется объектом, местоположение которого нужно определить, таким как абонентская станция в системе беспроводной связи, соответствующей стандарту IS-801. УОМ предоставляет абонентской станции помощь захвату (ПЗ), показывающую, какие КА вероятно являются видимыми для данной станции. Эти КА образуют группу NTOT. Во втором примере ПЗ не предоставляется, и группа NTOT содержит все КА в системе геолокации GPS. В третьем примере абонентская станция имеет доступ к недавнему альманаху, а также к приблизительной мере времени и приблизительному знанию собственного местоположения. На основании этой информации абонентская станция прогнозирует, какие КА являются видимыми для нее. Эти КА образуют группу NTOT в данном примере.
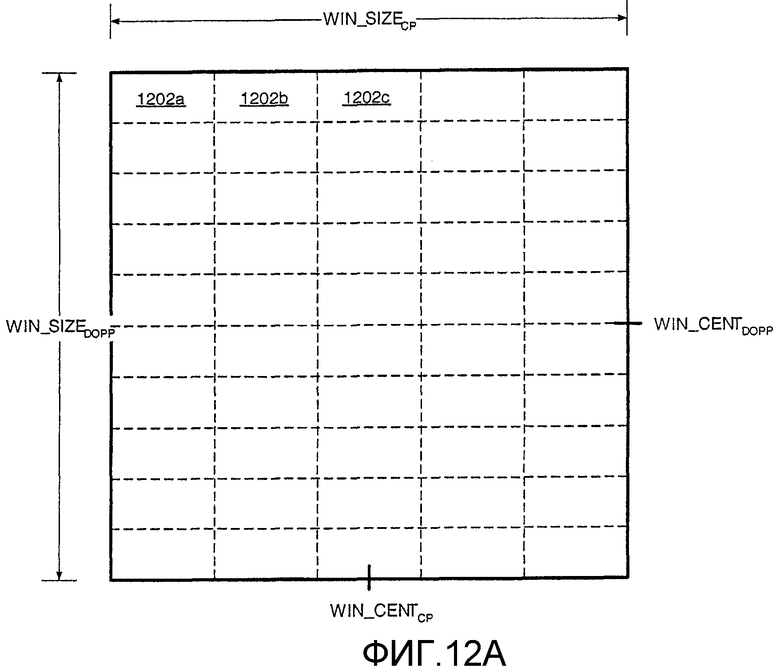
Каждый КА в группе NTOT связан с параметрами окна поиска, определяющими двухмерную область гипотез кодовой фазы и доплеровской частоты, в которой следует проводить поиск данного КА. В одном варианте, проиллюстрированном на фиг.12А, параметры окна поиска для КА содержат размер окна поиска кодовой фазы, WIN_SIZECP, центр окна кодовой фазы, WIN_CENTCP, размер окна доплеровского поиска, WIN_SIZEDOPP, и центр доплеровского окна, WIN_SIZEDOPP. Если объект, местоположение которого следует определить, является абонентской станцией в системе связи, соответствующей стандарту IS-801, эти параметры составляют помощь захвата, предоставляемую абонентской станции из УОМ.
Способ начинается с этапа 202, на котором определяют, не превышает ли какой-либо параметр окна поиска заданные пределы. В одном варианте на этапе 202 определяют, не превышает ли любое окно поиска для КА в группе NTOT заданные пределы размеров. Эта ситуация может возникнуть, например, если в сеть добавлена новая базовая станция без ее ввода в альманах базовых станций в УОМ. В этой ситуации УОМ при предоставлении ПЗ абонентским станциям, обслуживаемым наборами базовых станций, устанавливает размер окна поиска кодовой фазы для всех КА на максимальное значение 1023 чипа. Окно поиска кодовой фазы такой величины может вызвать возникновение условия тайм-аута во время поиска уровня 1. Цель этапа 202 в этом примере определить, какой КА, если таковой имеется, связан с окнами поиска, которые могут вызвать условие тайм-аута.
Если любой из параметров окна поиска превышает заданные пределы, выполняется этап 204. На этапе 204 выполняют поиск уровня 0. В одном примере поиск уровня 0 выполняют только для тех КА в группе NTOT, у которых размер окна поиска кодовой фазы превышает заданный порог.
После этапа 204 выполняют этап 206. На этапе 206 параметры окна поиска уточняют на основании полученных результатов поиска таким образом, чтобы они находились в заданных пределах. В одном примере, в котором поиск выполняют только для тех КА, у которых размеры окна поиска кодовой фазы превосходят заданный порог, на этом этапе определяют положение максимального пика для данного ПШ кода, модифицируют центр окна, чтобы он попал на пик, и уменьшают размер окна, чтобы поиск данного КА можно было провести за один проход через коррелятор. На этом этапе можно также рецентрировать окно поиска доплеровской частоты и уменьшить его размер.
После этапа 206 выполняется этап 208, на котором осуществляют поиск уровня 1 как часть попытки фиксации местоположения. Поиск уровня 1 более чувствительный, чем поиск уровня 0. Соответственно, в одном варианте время интеграции, используемое для проведения этого поиска, превышает время интеграции в поиске уровня 0.
После этапа 208 процесс переходит к этапу 210. На этапе 210 извлекаются измерения из полученных результатов поиска. В одном примере эти измерения содержат отношение сигнал-шум (ОСШ) и кодовую фазу (время) для каждого различимого пика. В одном варианте осуществления полученное ОСШ является пиковым отношением несущая/шум (C/N0).
После этапа 210 процесс переходит к этапу 212 запроса. На этапе 212 определяют, удовлетворяют ли измерения, полученные в поиске уровня 1, одному или более выбранным критериям достаточности измерений. Если измерения удовлетворяют одному или более выбранным критериям достаточности измерений, то дополнительный поиск в попытке фиксации местоположения не проводят.
Если измерения не удовлетворяют одному или более выбранным критериям достаточности измерений, то выполняют этап 214. На этапе 214 выполняют поиск более высокого уровня для сигналов определения местоположения. Поиск более высокого уровня является более чувствительным, чем поиск уровня 1. Соответственно время интеграции, используемое в этом поиске, больше, чем время интеграции в поиске уровня 1.
В одном варианте этап запроса 212 начинается со сравнения измерений ОСШ из поиска уровня 1 с первым шумовым порогом T1. Шумовой порог Т1 определяют таким образом, чтобы вероятность ложной тревоги была ниже заданного уровня. КА, которые превышают шумовой порог Т1, образуют группу N.
Измерения ОСШ из поиска уровня 1 также сравнивают со вторым, более сильным порогом Т2. КА, которые превышают порог Т2, образуют группу S. Группу S' образуют КА из группы NTOT, за исключением S.
В одном примере поиск более высокого уровня не проводят, если |S|, количество КА в группе S, равно |NTOT|, количеству КА в группе NTOT, что показывает, что все искомые КА удовлетворяют более сильному порогу Т2.
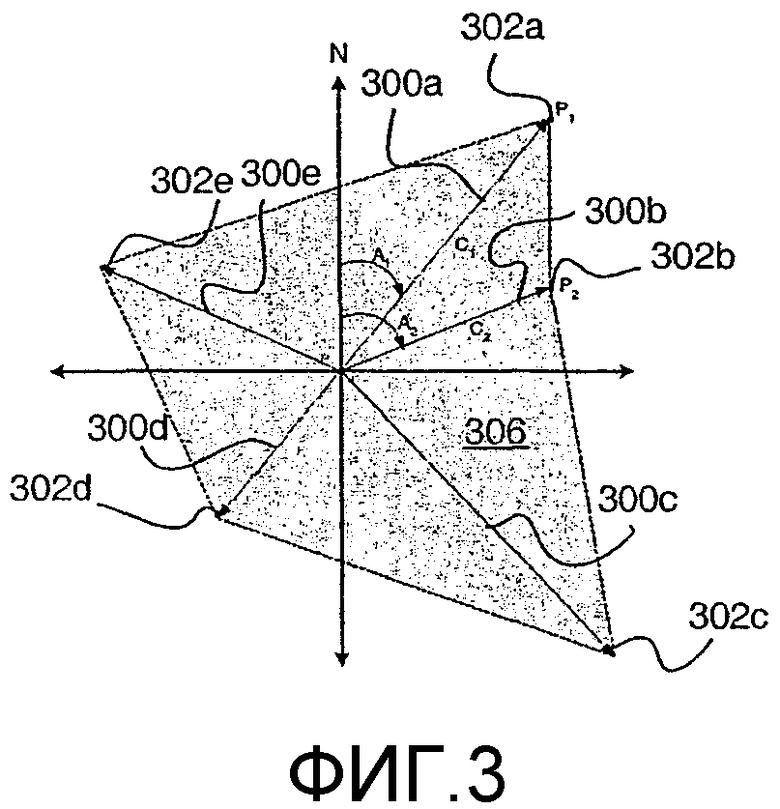
Во втором примере строят многоугольник на основании измерений для КА, входящих в группу N. Для каждого КА строят вектор из азимутального угла спутника и пикового отношения несущая/шум (C/N0). Эти векторы ориентируют в системе координат. Конечные точки векторов соединяют, чтобы получить многоугольник. В этом варианте второй поиск не проводят, если площадь А многоугольника равна или превышает порог AT.
На фиг.3 показан пример многоугольника, образованного пятью векторами 300а, 300b, 300с, 300d и 300е. Каждый из этих векторов представляет или соответствует одному измерению. Более конкретно, угол между вектором и вертикальной осью является азимутальным углом для КА, а величина вектора является пиковым отношением несущая/шум (C/N0). Конечные точки векторов обозначены цифрами 302а, 302b, 302с, 302d и 302е. Многоугольник, который образован этими конечными точками, обозначен номером 306. Площадь многоугольника, которую определяют с помощью известных методы, используется в описанном выше сравнении.
В третьем примере поиск более высокого уровня не проводят, если |N|, количество КА в группе N, равно или выше порога NEE.
В четвертом примере суммируют пиковое отношение несущая/шум (C/N0) для каждого КА в группе N. Поиск более высокого уровня не проводят, если эта сумма равна или выше заданного порога.
В пятом примере используют комбинацию двух или более описанных выше операций для определения, следует ли исключить поиск более высокого уровня.
На фиг.4 проиллюстрирован пример реализации способа поиска сигналов определения местоположения с использованием нескольких режимов поиска с постепенно возрастающей чувствительностью. В этом примере реализации изобретения объект, местоположение которого следует определить, является абонентской станцией в системе беспроводной связи, соответствующей стандарту IS-801.
В этом примере используются следующие режимы поиска по порядку возрастания чувствительности: режим уровня 0, режим уровня 1, режим уровня 2 и режим уровня 3. В одном примере параметры, управляющие каждым из этих режимов, проиллюстрированы на фиг.11. Как можно увидеть в этом примере, общее время интеграции, использованное в режиме 0, равно 20 мс, что представляет 20 мс когерентной интеграции; общее время интеграции, использованное в режиме 1, равно 80 мс, что представляет четыре когерентные интеграции по 20 мс, соединенные некогерентно; общее время интеграции, использованное в режиме 2, равно 880 мс, что представляет 44 когерентные интеграции по 20 мс, соединенные некогерентно; и общее время интеграции, использованное в режиме 3, равно 1760 мс, что представляет 22 когерентные интеграции по 80 мс, соединенных некогерентно. Поскольку чувствительность пропорциональна общему времени интеграции, чувствительность этих режимов также последовательно возрастает. В проиллюстрированном примере чувствительность режима 0 составляет 31,0 дБ-Гц, чувствительность режима 1 составляет 26,4 дБ-Гц, чувствительность режима 2 составляет 19,2 дБ-Гц, чувствительность режима 3 составляет 15,45 дБ-Гц.
Способ начинается с этапа 402. На этом этапе абонентская станция получает помощь захвату от УОМ для каждого КА в группе NTOT. Помощь захвату указывает для каждого КА размер окна кодовой фазы, центр окна кодовой фазы, размер окна доплеровской частоты и центр окна доплеровской частоты. Следует отметить, что помощь захвата, хотя и она доступна, не запрашивается в это время из-за большой перегрузки и потому, что помощь захвата не требуется для времени когерентной интеграции 20 мс или меньше (которое используется в режимах поиска уровней 0, 1 и 2).
Затем процесс переходит к этапу 404. На этапе 404 делается запрос, имеет ли какой-либо КА в группе NTOT размеры окна кодовой фазы, превышающие заданный порог.
В одной конфигурации заданный порог установлен так, чтобы можно было идентифицировать КА, имеющие кодовые фазы, которые не позволяют осуществить поиск для данного КА за один проход через коррелятор. Рассмотрим, например, коррелятор, имеющий восемь (8) параллельных каналов с емкостью 32 чипа у каждого канал, и несколько чипов перекрытия между каналами. Поиск КА можно осуществить за один проход через коррелятор, если окно поиска кодовой фазы меньше или равно около 200 чипам, т.е. числу, полученному путем вычитания избытка, обусловленного перекрытием между каналами, из 256 чипов, т.е. предполагаемой номинальной емкости коррелятора. Поэтому в данной конфигурации те КА, у которых окна кодовой фазы превышают 200 чипов, подвергаются поиску уровня 1. Однако следует понимать, что данный порог сильно зависит от реализации и поэтому может быть разным.
На этапе 404, если ни один из КА в группе NTOT не имеет окна кодовой фазы, которое превышает заданный порог, процесс переходит к этапу 408. Если любой из этих КА имеет окно кодовой фазы, которое превышает порог, выполняется этап 406. На этапе 406 способ выполняет поиск уровня 0 для каждого КА в группе NTOT, у которого окно кодовой фазы превышает порог.
Для каждого КА, для которого проводится поиск уровня 0, находят максимальный пик в результирующей корреляционной функции. Затем устанавливают центр окна кодовой фазы для КА на кодовую фазу, связанную с максимальным пиком для данного КА. Размер окна кодовой фазы для КА также уменьшают таким образом, чтобы этот КА можно было обнаружить снова, используя один поиск сегмента. Данные помощи из любого КА, который не обнаружен при поиске уровне 0, удаляют с тем, чтобы не проводить поиск этих КА на следующих уровнях поиска.
После этапа 406 поиск переходит к этапу 408. На этапе 408 выполняют поиск уровня 1 в отношении всех КА в группе NTOT. На этом этапе выбранные критерии достаточности измерений также применяют к измерениям, извлеченным из результатов поиска, и устанавливают флаг, если выбранные критерии достаточности измерения удовлетворены. Эти критерии достаточности измерения будут более подробно поясняться ниже в связи с фиг.9.
Как часть этапа 408, измерения, полученные при поиске уровня 1, классифицируют по трем категориям: сильные, слабые и отсутствующие. В одном примере эту классификацию выполняют с помощью сравнения с порогом. Первый порог Т1 используют для определения пиков, которые находятся в слабой категории, а второй, более жесткий порог Т2 используют для определения пиков, которые находятся в сильной категории. КА в слабой категории образуют группу N, а КА в сильной категории образуют группу S. Группа S' содержит КА группы NTOT, за исключением КА из группы S. Следует отметить, что подобное сравнение с порогом также выполняют в поисках уровня 2 и 3 и что группу S можно пополнить, если при любом из этих поисков будет найден сильный пик, который не был ранее идентифицирован при поиске уровня 1.
В одной конфигурации, показанной в таблице на фиг.11, порог Т1, применяемый в режиме 1 для идентификации слабых пиков, равен 25,0 дБ-Гц. В этой конфигурации порог Т2 изменяется в соответствии с одной из трех опций отношения времени фиксации к точности/чувствительности, выбираемых пользователем. Более конкретно, порог Т2 для первой, второй и третьей опций соответственно установлен на 29,4 дБ-Гц, 32,4 дБ-Гц и ∞. Последнее относится к настолько большому установочному значению, что порог Т2 никогда не будет удовлетворен.
После этапа 408 выполняют этап 410. На этапе 410 проверяют флаг, указывающий состояние применения выбранных критериев достаточности измерений на этапе 408. Если флаг установлен, показывая, что выбранные критерии достаточности измерений удовлетворены, процесс переходит к этапу 420. На этапе 420 измерения, полученные при поиске уровня 1, сообщаются в УОМ, который определяет местоположение абонентской станции на их основании. Альтернативно сама абонентская станция определяет свое местоположение по этим измерениям. Если флаг не установлен, показывая, что критерии достаточности измерений не удовлетворены, процесс переходит к этапу 412.
На этапе 412 применяются заданные критерии выбора для определения, следует ли выполнить поиск уровня 2 или уровня 3. Эти критерии выбора будут более подробно поясняться ниже в связи с фиг.10. Если выбирается уровень 2, то процесс переходит к этапу 414. Если выбирается уровень 3, то процесс переходит к этапу 416.
На этапе 414 выполняют поиск уровня 2 для КА в группе S'. Для КА в группе S поиск не проводят, так как считается, что в поиске уровня 1 были получены приемлемые измерения для этих КА. После этапа 414 процесс переходит к этапу 420. На этапе 420 измерения из поиска уровня 2 и любые измерения уровня 1 для КА в группе S сообщаются в УОМ. В ответ УОМ определяет местоположение абонентской станции по этим измерениям. Альтернативно абонентская станция сама определяет свое местоположение на основании этих измерений.
На этапе 416 абонентская станция запрашивает помощь чувствительности у УОМ, чтобы учесть те изменения фазы в битах, которые произошли за 80 мс времени когерентной интеграции, использованной при поиске уровня 3. Как обсуждалось выше, этот этап откладывался до данного момента, чтобы избежать перегрузки из-за помощи чувствительности в том случае, если поиск уровня 3 не требуется или выбирается.
После этапа 416 процесс переходит к этапу 418. На этапе 418 выполняется поиск уровня 3 для КА в группе S'. Снова поиск для КА в группе S не проводится, так как при поиске уровня 1 были получены приемлемые измерения для этих КА.
За этапом 418 следует этап 420. На этапе 420 измерения, полученные при поиске уровня 3, и любые измерения уровня 1 для КА в группе S сообщаются в УОМ. В ответ УОМ определяет местоположение абонентской станции. Альтернативно, сама абонентская станция определяет собственное местоположение по этим измерениям.
На фиг.5 проиллюстрированы задачи или подэтапы, которые лежат в основе поиска уровня 0, блок 406 на фиг.4. В задаче 502 определяются те КА в группе NTOT, у которых размер окна кодовой фазы превышает заданный порог. В одном примере, обсуждавшемся выше, заданный порог составляет 200 чипов, однако следует понимать, что этот порог сильно зависит от конкретной реализации, и возможны другие значения.
В задаче 504 выбирают один из КА и в задаче 506 увеличивают окно кодовой фазы для выбранного КА, если это необходимо, чтобы пространство поиска кодовой фазы для данного КА содержало целое число квантов. В целях данного раскрытия под квантом подразумевается пространство кодовой фазы, в котором можно провести поиск за один проход через коррелятор. В одном примере, в котором коррелятор содержит 8 параллельных каналов емкостью 32 чипа каждый, размер кванта составляет 256 чипов. В этом примере кодовую фазу увеличивают, чтобы учесть 4 чипа перекрытия между соседними сегментами, а затем увеличивают еще и рецентрируют до тех пор, пока не будет реализована сумма К·8 сегментов, где К - целое число. Однако снова следует понимать, что этот пример зависит от конкретной реализации и возможны другие примеры.
После задачи 506 выполняют задачу 508. В задаче 508 пространство поиска для КА делят на сегменты, чтобы приспособиться к поиску уровня 0. На фиг.12А и 12В показана более подробно эта процедура сегментации.
На фиг.12А показано двухмерное пространство поиска для КА. В этом примере ось кодовой фазы горизонтальная, а ось доплеровской частоты вертикальная, но это назначение является произвольным и его можно изменить на обратное. Центр окна поиска кодовой фазы обозначен как WIN_CENTCP, а размер окна поиска кодовой фазы обозначен как WIN_SIZECP. Центр окна поиска доплеровской частоты обозначен как WIN_CENTDOPP, а размер окна поиска доплеровской частоты обозначен как WIN_SIZEDOPP.
Пространство поиска разделено на множество сегментов 1202а, 1202b, 1202с, каждый из которых характеризуется интервалом доплеровских частот и интервалом кодовых фаз. В одном примере, показанном в таблице на фиг.11, интервал частот, связанный с одним сегментом, составляет ±250 Гц для режимов поиска 0, 1 и 2 и ±62,5 Гц для режима поиска уровня 3, а интервал кодовых фаз, связанных с сегментом, равен 32 чипам. В этом конкретном примере интервал частот, характеризующих сегмент, разделен на 20 элементов разрешения, а интервал кодовых фаз, характеризующих сегмент, разделен на 64 элемента разрешения.
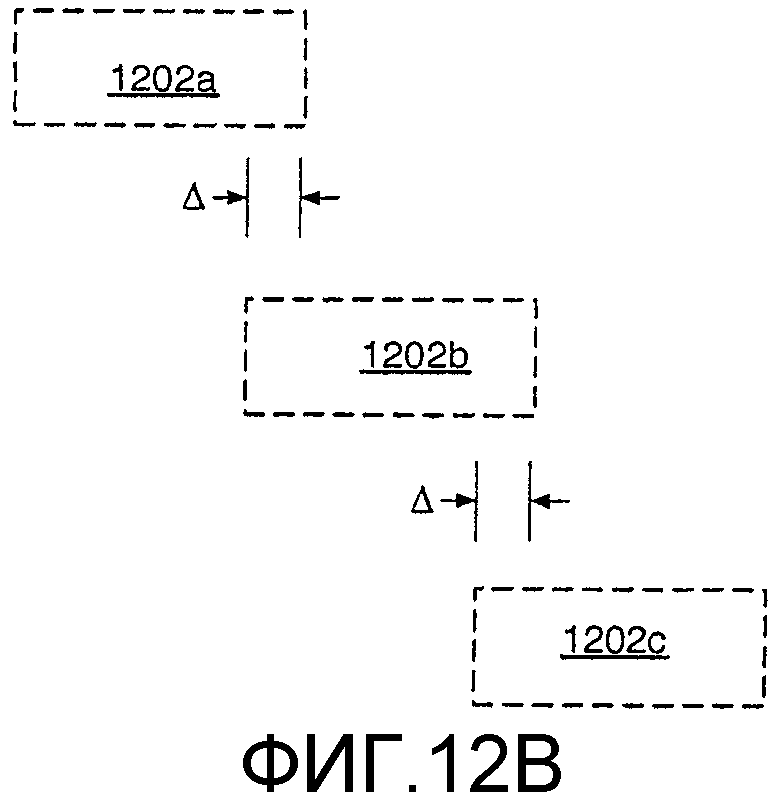
Интервал кодовых фаз, характеризующих сегмент, преимущественно равен пропускной способности канала коррелятора. При этом поиск сегмента можно осуществить за один проход канала. В одном примере, в котором пропускная способность канала равна 32 чипам, интервал кодовых фаз, характеризующий сегмент, также равен 32 чипам, однако понятно, что возможны и другие примеры.
Сегменты преимущественно перекрываются на заданное число чипов, чтобы избежать отсутствия пиков, возникающего на границах сегментов. На фиг.12В проиллюстрировано обычно используемое перекрытие. Как показано на чертеже, конечный участок сегмента 1202а перекрывает передний участок сегмента 1202b на Δ чипов и конечный участок сегмента 1202b также перекрывает передний участок сегмента 1202с на Δ чипов. Из-за избытка, обусловленного этим перекрытием, эффективный интервал кодовых фаз, представленных сегментом, обычно меньше, чем пропускная способность канала. Если перекрытие составляет, например, 4 чипа, то эффективный интервал кодовых фаз, представленных сегментом, будет равен 28 чипам.
Возвратимся к фиг.5: в задаче 508 пространство поиска фазы для КА делят на сегменты при подготовке к поиску уровня 0, и эти сегменты организуют в очередь. Затем выполняют задачу 510. В задаче 510 определяют, есть ли еще КА в группе NTOT, у которых окна поиска превышают заданный порог. Если они есть, то процесс возвращается к этапу 504 для выполнения другого прохода через задачи 504, 506 и 508. В противном случае процесс переходит к этапу 512. При выполнении задач 504, 506, 508 и 510 можно заметить, что пространство поиска для каждого КА, у которого окно поиска кодовой фазы превосходит заданный порог, делится на сегменты, которые организуют в очередь для поиска уровня 0.
В задаче 512 выполняют поиск уровня 0 посредством коррекции параметров кодовой фазы сегмента и доплеровского окна, чтобы учесть время, истекшее между временем данных помощи и временем выполнения поиска уровня 0, и последующей обработки сегментов через коррелятор. При этом снова в одном примере, в котором коррелятор содержит восемь параллельных каналов, сегменты обрабатываются через коррелятор по восемь сегментов каждый раз, однако понятно, что возможны и другие примеры. Интеграции выполняются коррелятором в соответствии с параметрами интеграции уровня 0. Эти параметры предпочтительно увеличивают скорость, а не чувствительность. В одном примере параметры интеграции для поиска уровня 0 содержат, как показано в таблице на фиг.11, одну когерентную интеграцию 20 мс. Соответственно, поиск уровня 0 типично обнаруживает только самые сильные сигналы.
После задачи 512 выполняют задачу 514. В задаче 514 сохраняется элемент разрешения по кодовой фазе и по доплеровской частоте, связанный с самым сильным пиком для каждого КА, поиск которого осуществляется. После задачи 516 процесс циклически возвращается к задаче 512 до тех пор, пока не будет осуществлен поиск для всех стоящих в очереди сегментов. Предпочтительно поиск осуществляется для всех сегментов в течение доли одного времени настройки на частоту GPS, однако следует понимать, что может потребоваться множество периодов времени настройки частоты GPS для поиска по всем сегментам.
После проведения поиска по всем сегментам выполняется задача 518. В задаче 518 самый сильный пик для каждого КА, для которого проводился поиск, сравнивают с порогом обнаружения для режима 0. В одном примере, проиллюстрированном в таблице на фиг.11, порог обнаружения режима 0 составляет 29,8 дБ-Гц. Если самый сильный пик для КА ниже этого порога, то данные захвата для КА, т.е. размеры и центры окна поиска, обнуляются, гарантируя тем самым, что в отношении этого КА больше будет проводиться поиск или передаваться отчет. Это является целесообразным, поскольку такие КА представляют собой КА с большими окнами поиска, которые невозможно уменьшить при поиске уровня 0. Следовательно, важно исключить эти КА из класса КА, по которым проводится поиск, во избежание возникновения условий таймаута и т.п.
После задачи 518 выполняют задачу 520. В задаче 520 для каждого оставшегося КА, т.е. для тех КА, у которых самый сильный пик превосходит порог уровня 0, центр окна кодовой фазы для КА размещают на пике, а размер окна уменьшают, чтобы пик можно было обнаружить за один проход сегмента через коррелятор. Кроме того, доплеровскую частоту 0-го порядка модифицируют таким образом, чтобы центральная частота элемента разрешения по доплеровской частоте была расположена на максимальном пике.
После выполнения задачи 520 выполняют поиск уровня 0.
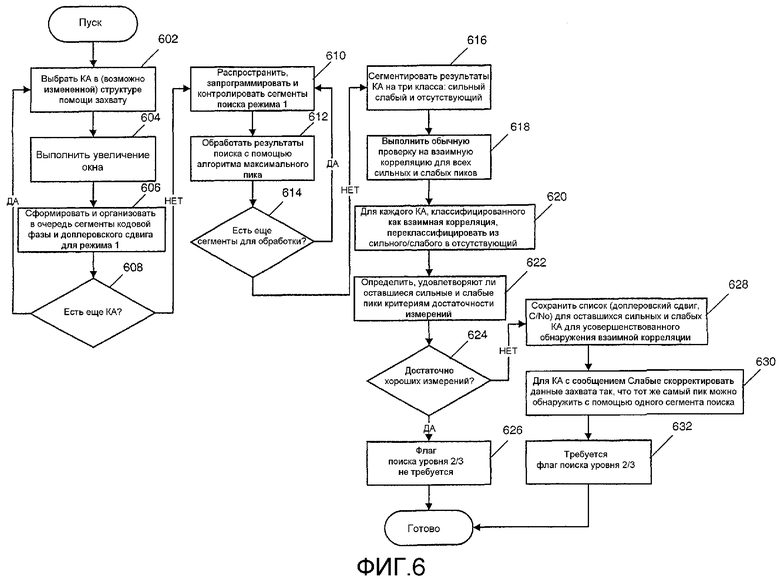
На фиг.6 проиллюстрированы задачи, лежащие в основе поиска уровня 1, блок 408 на фиг.4. В задаче 602 выбирают тот КА в группе NTOT, у которого данные помощи захвата все еще не обрабатывались, и которые можно модифицировать посредством поиска уровня 0.
Затем выполняется задача 604. В задаче 604 окно поиска кодовой фазы для данного КА увеличивают, чтобы учесть дрейф кода во времени. В одном примере используют увеличение на 4 чипа.
После задачи 604 выполняют задачу 606. В задаче 606 пространство поиска для КА делят на сегменты при подготовке к поиску уровня 1 и организуют очередь сегментов. В одном примере, показанном на фиг.11, сегмент для поиска уровня 1 характеризуется интервалом доплеровских частот ±250 Гц, разделенным на 20 элементов разрешения, и интервалом 32 чипа, разделенным на 64 элемента разрешения.
В задаче 608 делают запрос, есть ли еще КА с необработанными данными захвата, для которых следует выполнить поиск уровня 1. Если они есть, то процесс возвращается к задаче 602. Если нет, процесс переходит к выполнению задачи 610. В результате задач 602 и 608 задачи 604 и 606 выполняются для каждого КА в группе NTOT, у которого данные захвата остались нетронутыми после выполнения поиска уровня 0.
В задаче 610 все организованные в очередь сегменты уровня 1 обрабатываются через коррелятор. В одном примере эти сегменты обрабатываются через коррелятор по восемь сегментов за раз, однако понятно, что возможны и другие примеры.
Затем выполняют задачу 612. В задаче 612 выполняют алгоритм максимального пика. Согласно этому алгоритму сохраняется самый сильный пик для каждого КА, для которого проводится поиск уровня 1.
После задачи 612 выполняют задачу 614. В задаче 614 делают запрос, есть ли еще сегменты уровня 1, подлежащие обработке. Если они есть, то процесс возвращается к задаче 610. В противном случае процесс переходит к задаче 616. Задача 614 вызывает итерацию процесса через задачи 610 и 612 до тех пор, пока не будут обработаны все сегменты уровня 1.
Время интеграции, используемое в поиске уровня 1, повышает скорость, а не чувствительность, однако реализует это в меньшей степени, чем при поиске уровня 0. В одном примере время интеграции уровня 1, как показано на фиг.11, равно 80 мс, что представляет четыре когерентные интеграции по 20 мс, объединенные некогерентно. Предпочтительно, благодаря параметрам интеграции уровня 1 и уменьшению окон поиска, достигнутому в поиске уровня 0, все сегменты уровня 1 обрабатываются в течение одного периода настройки на частоту GPS.
Затем выполняют задачу 616. В задаче 616 КА, поиск которых осуществлялся при поиске уровня 1, делятся на три категории: сильные, слабые и отсутствующие. В одном примере эту классификацию выполняют путем сравнения с порогом. Если самый сильный пик, обнаруженный для КА, превышает порог Т1, то этот КА помещают в категорию слабых. Если самый сильный пик, обнаруженный для КА, превышает второй более сильный порог Т2, то КА помещают в категорию сильных. В одном примере, показанном на фиг.11, порог Т1 равен 25,0 дБ-Гц. Порог Т2, как было указано выше, изменяется в зависимости от опции отношения времени фиксации к точности/частоте, выбранной пользователем. В одной конфигурации возможна одна из трех опций: порог Т2 для первой, второй и третьей опций соответственно установлен на 29,4 дБ-Гц, 32,4 дБ-Гц и ∞. Последнее значение относится к настолько большому установочному значению, что порог Т2 никогда не будет удовлетворен.
КА в категории слабых образуют группу N, а КА в категории сильных образуют группу S. Группа S' содержит КА группы NTOT, исключая КА группы S.
После задачи 616 выполняют задачу 618. В задаче 618 анализируют пики в категориях сильных и слабых, чтобы убедиться, что они не обусловлены взаимной корреляцией. Анализ, выполняемый для обнаружения пиков, обусловленных взаимной корреляцией, обычный и не требует подробного описания.
Затем выполняют задачу 620. В задаче 620, если определено, что какой-то пик в категории сильных или слабых обусловлен взаимной корреляцией, его реклассифицируют в категорию отсутствующих, т.е. рассматривают его, как если бы он не удовлетворял порог Т1.
Затем выполняют задачу 622. В задаче 622 определяют, удовлетворяют ли измерения, полученные из результатов поиска уровня 1, одному или более выбранным критериям достаточности измерений. Затем выполняют задачу 624. В задаче 624, если измерения уровня 1 удовлетворяют одному или более выбранным критериям достаточности измерений, выполняют задачу 626. В задаче 626 устанавливают флаг, показывающий, что поиск уровня 2 или 3 не требуется. В задаче 624, если измерения уровня 1 не удовлетворяют одному или более критериям достаточности измерений, выполняют задачу 628.
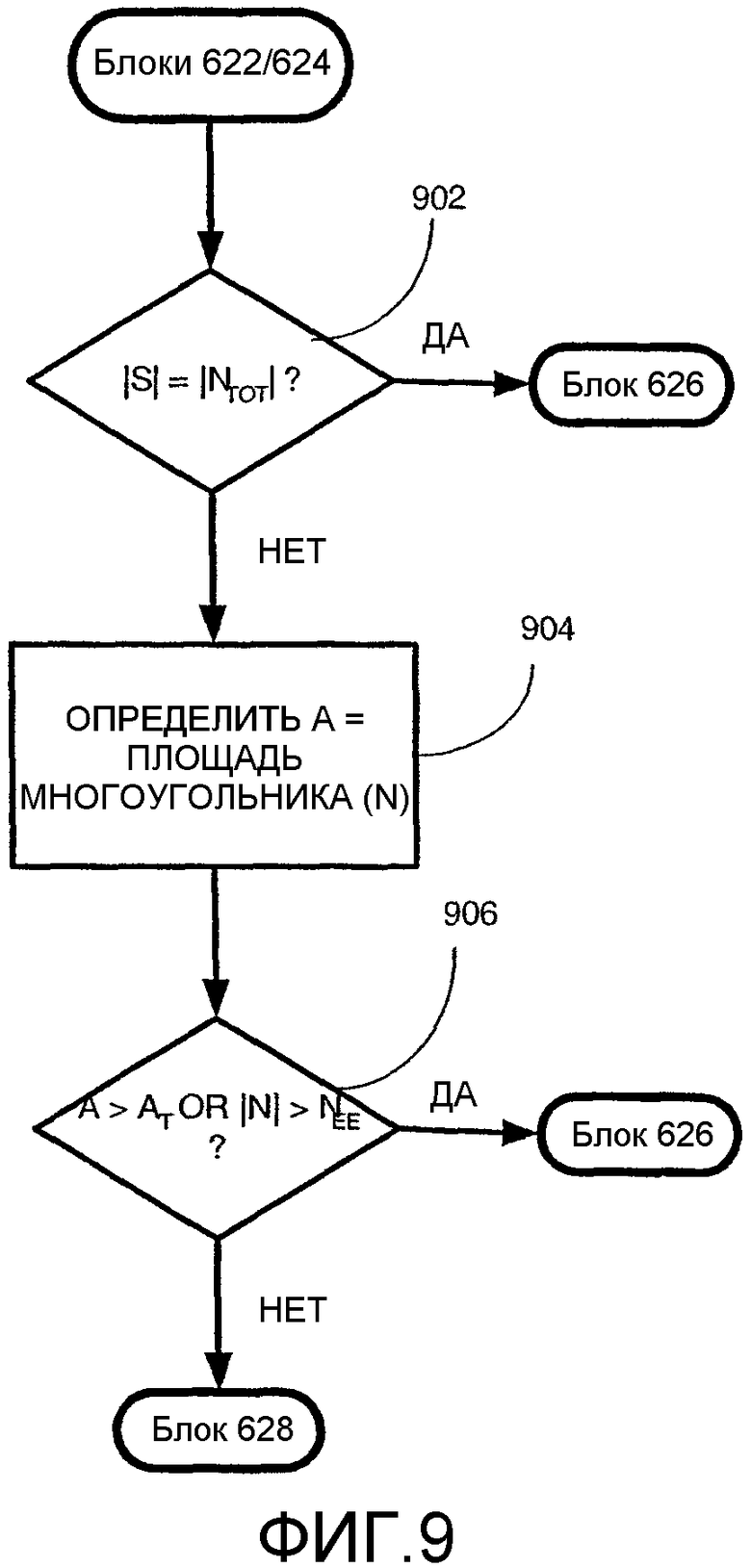
На фиг.9 проиллюстрированы конкретные подэтапы, лежащие в основе задач 622 и 624. На подэтапе 906 сравнивают |S|, количество КА в группе S, а значит и в категории сильных, с |NTOT|, количеством КА в группе NTOT. Если |S| равно |NTOT|, свидетельствуя, что все КА в группе NTOT находятся в категории сильных, процесс переходит к задаче 626, в которой устанавливают флаг, указывающий, что поиск уровня 2 или 3 не требуется.
Если |S| не равно |NTOT|, выполняют подэтап 904. На подэтапе 904 строят многоугольник, описанный выше в связи с фиг.3, из измерений для КА, входящих в группу N, и определяют площадь А этого многоугольника.
После подэтапа 904 выполняют подэтап 906 запроса. На подэтапе 906 запроса площадь А многоугольника сравнивают с пороговой площадью АТ. Кроме того, |N|, количество КА в группе N, сравнивают с порогом NEE. Если площадь А превышает AT или |N| превышает NEE, процесс переходит к задаче 626 на фиг.6. В противном случае процесс переходит к этапу 628 на фиг.6.
В одном примере пороговая площадь АТ и пороговое число NEE изменяются в зависимости от порогового отношения времени фиксации к точности/чувствительности, выбранного пользователем. В одной конфигурации пороговая площадь АТ для первой, второй и третьей опций соответственно установлена на 4·107, 6·107 и ∞. Последнее значение относится к настолько большому установочному значению, что порог никогда не будет удовлетворен. Кроме того, пороговое число NEE для первой, второй и третьей опций соответственно установлено на 4, 5 и ∞. И в этом случае последнее значение относится к настолько большому установочному значению, что порог никогда не будет достигнут.
Возвратимся к фиг.6: задачу 628 выполняют, если измерения из уровня 1 не удовлетворяют одному или более выбранным критериям достаточности измерений. В задаче 628 сохраняют список сильных и слабых пиков, а также полученные из них измерения, такие как элемент разрешения по доплеровской частоте и кодовой фазе, содержащий данный пик, и пиковое отношение несущей к шуму (C/N0) для данного пика. Этот список используют в следующем поиске уровне 2 или 3 для обнаружения пиков, обусловленных взаимной корреляцией.
Затем выполняют задачу 630. В задаче 630 данные захвата для КА, соответствующих слабым пикам, т.е. входящих в группу N, корректируют таким образом, чтобы пик мог быть обнаружен в одном сегменте поиска. Соответственно, окно кодовой фазы рецентрируют на кодовую фазу, в которой найден данный пик, и размер окна кодовой фазы уменьшают до 28 чипов. Аналогично размер доплеровского окна уменьшают до 25 Гц и доплеровскую частоту 0-го порядка модифицируют так, чтобы она была интерполированной частотой, где обнаружен пик.
Затем выполняют задачу 632. В задаче 632 устанавливают флаг, показывающий, что требуется поиск уровня 2 или 3. После этого поиск уровня 1 заканчивается.
На фиг.10 показаны подэтапы, лежащие в основе задаче 412, в которой выбирают поиск уровня 2 или 3. На подэтапе запроса 1002, |N|, количество КА в группе N, сравнивают со вторым пороговым числом NE. Если |N| превышает NE, процесс переходит к блоку 414 и выполняется поиск уровня 2. В противном случае процесс переходит к подэтапу 1004.
В одном примере второе пороговое число NE изменяется в зависимости от опции отношения времени фиксации к точности/чувствительности, выбираемой пользователем. В одной конфигурации значение NE для первой, второй и третьей опций соответственно установлено на 5, 5 и ∞. Последнее означает настолько большое установочное значение, что порог никогда не будет удовлетворен.
На подэтапе запроса 1004 определяют оценку test времени, необходимого для выполнения поиска уровня 3 в отношении КА, входящих в группу S'. Это время сравнивают с максимальным временем tmax, которое остается в текущем сеансе определения местоположения GPS. Если test превышает tmax, показывая недостаточность времени для проведения поиска уровня 3 в текущем сеансе, процесс переходит к задаче 414 на фиг.4. В противном случае процесс переходит к задаче 416.
В одном примере время tmax основано на соображениях обслуживания. Во втором примере с использованием поиска, инициированного УОМ или завершенного в подвижном устройстве, например, поиска, инициированного вызовом службы 911 с абонентской станции в системе, соответствующей стандарту IS-801, tmax представляет собой значение предпочтительного качества ответа (ПКО), заданное УОМ. В третьем примере для поиска, инициированного подвижным устройством, такого как поиск на основе географии в Интернет, инициированный абонентской станцией, tmax назначается абонентской станцией.
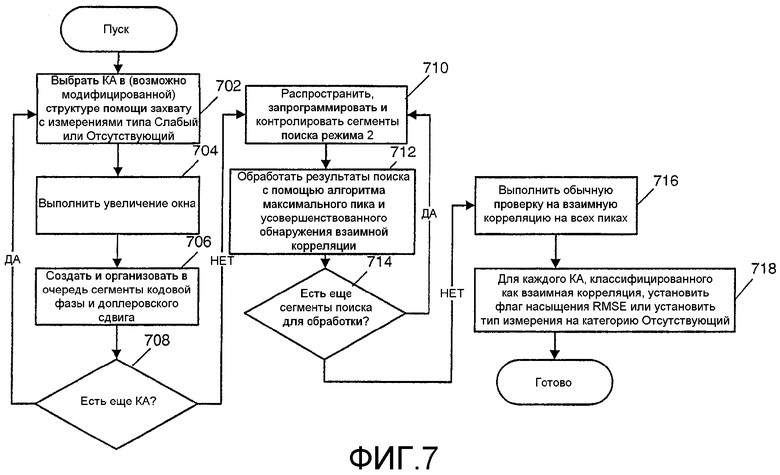
На фиг.7 проиллюстрированы задачи, лежащие в основе поиска уровня 2, блок 414 на фиг.4. В задаче 702 выбирают КА в группе S', т.е. КА, ранее классифицированные как находящиеся в категории слабых или отсутствующих.
После задачи 702 выполняют задачу 704. В задаче 704 окно кодовой фазы для выбранного КА увеличивают, чтобы приспособиться к перекрытию между соседними сегментами коррелятора. В одном примере эти сегменты перекрываются четырьмя чипами, но понятно, что возможны и другие примеры.
После задачи 704 выполняют задачу 706. В задаче 706 пространство поиска для выбранных КА делят на сегменты при подготовке к поиску уровня 2 и сегменты организуют в очередь. В одном примере сегменты уровня 2, как показано на фиг.11, характеризуются интервалом ±250 доплеровских частот, разделенным на 20 элементов разрешения по частоте, и интервалом 32 кодовых фаз, разделенным на 64 элемента разрешения по кодовой фазе.
После задачи 706 выполняют задачу 708. В задаче 708 делают запрос, есть ли еще КА в группе S'. Если они есть, то процесс возвращается к задаче 702 для следующей итерации. Если их нет, процесс переходит к задаче 710. Посредством итерации цикла, представленного задачами 702, 704, 706 и 708, способ формирует и организует в очередь сегменты уровня 2 для каждого КА в группе S'.
В задаче 710 сегменты уровня 2 обрабатываются через коррелятор. В одном примере, в котором коррелятор содержит восемь параллельных каналов, каждый раз через коррелятор обрабатывается восемь сегментов, хотя понятно, что возможны и другие примеры.
После задачи 710 выполняют задачу 712. В задаче 712 применяют алгоритм множества/максимального пиков для обнаружения самого раннего действительного пика для каждого данного КА в группе S'. Этот процесс отличается от алгоритма максимального пика, упоминаемого в задаче 612, который находит самый сильный пик для каждого КА, задействованного в соответствующем поиске. Согласно одному примеру алгоритма множества/максимального пиков, действительным пиком для КА является самый сильный пик для данного КА, если только нет более раннего пика в пределах 4 чипов и 15 дБ самого сильного пика, в этом случае действительным пиком будет этот более ранний пик. В этом алгоритме признается, что самый ранний пик не всегда является самым сильным пиком, а может быть более слабым пиком, предшествующим по времени самому сильному пику.
Кроме того, пики, идентифицированные в задаче 712, анализируются, чтобы определить, не представляют ли они взаимные корреляции пиков, перечисленных в задаче 628. Если какой-либо пик будет идентифицирован как таковой, то он отбрасывается во время выполнения и предпочтение отдается другим более слабым пикам, которые могут лучше представлять КА. В одном примере этот этап осуществляют путем сравнения C/N0 и доплеровских значений пиков, идентифицированных в задаче 712, с соответствующими значениями пиков, идентифицированных в задаче 628.
После задачи 712 выполняют задачу 714. В задаче 714 делают запрос, остались ли еще сегменты уровня 2 для обработки. Если они есть, то процесс возвращается к задаче 710 для другой итерации. Если их нет, процесс переходит к этапу 716. Посредством одной или более итераций задач 710, 712 и 714 обрабатываются все сегменты уровня 2.
Параметры интеграции, лежащие в основе поиска уровня 2, повышают чувствительность и точность, а не скорость. В одном примере, показанном на фиг.11, интеграция для поиска уровня 2 содержит 44 когерентные интеграции по 20 мс, которые объединены некогерентно. В одном примере параметры интеграции уровня 2 таковы, что каждый канал коррелятора может обработать два сегмента уровня 2 за один период настройки на частоту GPS. В том случае, если коррелятор имеет восемь параллельных каналов, это обуславливает требование, чтобы по меньшей мере 16 сегментов обрабатывалось за один период настройки на частоту GPS.
Предпочтительно, чтобы все сегменты уровня 2 можно было обработать за один период настройки на частоту GPS, однако понятно, что, возможно, потребуется несколько периодов настройки на частоту GPS для обработки сегментов уровня 2.
Затем выполняют задачу 716. В задаче 716 применяют обычную проверку на взаимную корреляцию ко всем пикам, которые были идентифицированы. Эти пики включают в себя пики в группе S, идентифицированные в поиске уровня 1 или уровня 2, и пики в группе S'. Так как эта проверка обычная, она требует подробного описания.
После задачи 716 выполняют задачу 718. В задаче 718 для каждого пика, идентифицированного как взаимная корреляция, устанавливают флаг насыщения RMSE или альтернативно устанавливают тип измерения на категорию отсутствующих, показывающую, что этот пик будет проигнорирован в целях определения местоположения. После этого поиск уровня 2 заканчивается.
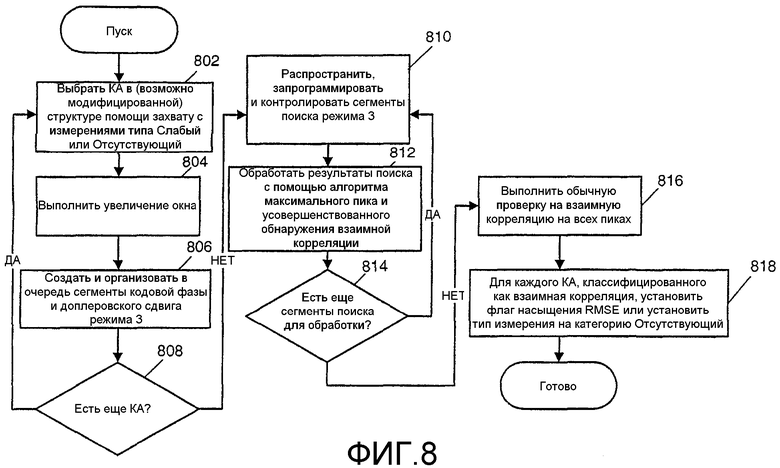
На фиг.8 проиллюстрированы задачи, лежащие в основе поиска уровня 3, блок 418 на фиг.4. В задаче 802 выбирают КА в группе S', т.е. группе, содержащей КА, ранее классифицированные как находящиеся в категории слабых или отсутствующих.
После задачи 802 выполняют задачу 804. В задаче 804 окно кодовой фазы для выбранного КА увеличивают, чтобы учесть дрейф кода во времени. В одном примере сегменты увеличиваются на четыре чипа.
После задачи 804 выполняют задачу 806. В задаче 806 пространство поиска для выбранного КА делят на сегменты при подготовке к поиску уровня 3 и эти сегменты организуют в очередь. В одном примере сегменты уровня 3, как показано на фиг.11, характеризуются интервалом ±62,5 доплеровских частот, разделенным на 20 элементов разрешения, и интервалом 32 кодовых фаз, разделенным на 64 элемента разрешения.
После задачи 806 выполняют задачу 808. В задаче 808 делают запрос, есть ли еще КА в группе S'. Если они есть, процесс возвращается к задаче 802 для другой итерации. Если нет, процесс переходит к задаче 810. Посредством итераций цикла, представленного задачами 802, 804, 806 и 808, процесс формирует и организует в очередь сегменты уровня 3 для каждого КА в группе S'.
В задаче 810 сегменты уровня 3 обрабатываются через коррелятор. В одном примере, в котором коррелятор содержит восемь параллельных каналов, коррелятором обрабатывается каждый раз восемь сегментов, хотя следует понимать, что возможны и другие примеры.
После задачи 810 выполняют задачу 812. В задаче 812 применяют алгоритм множества/максимального пиков для нахождения самого раннего действительного пика для каждого данного КА в группе S'. Кроме того, пики, идентифицируемые в задаче 812, анализируют, чтобы определить, не представляют ли они взаимные корреляции пиков, перечисленных в задаче 628. Если какой-либо пик идентифицирован как таковой, то он отбрасывается во время выполнения и предпочтение отдается другим более слабым пикам, которые могут лучше представлять КА. В одном примере этот этап выполняют путем сравнения C/N0 и доплеровских значений пиков, идентифицированных в задаче 812, с соответствующими значениями пиков, идентифицированных на этапе 628.
После задачи 812 выполняют задачу 814. В задаче 814 делают запрос, остались ли еще сегменты уровня 3 для обработки. Если они есть, то процесс возвращается обратно к задаче 810 для следующей итерации. В противном случае процесс переходит к этапу 816. Посредством одной или более итераций задач 810, 812 и 814 обрабатываются все сегменты уровня 3.
Параметры интеграции, лежащие в основе поиска уровня 3, повышают чувствительность и точность, а не скорость, и они выполняют эту задачу в большей степени, чем в поиске уровня 2. В одном примере, показанном на фиг.11, интеграция в поиске уровня 3 содержит 22 когерентные интеграции по 80 мс, которые объединены некогерентно. В одном примере параметры интеграции уровня 3 таковы, что сегменты одного уровня 3 можно обрабатывать каждым каналом коррелятора за один период настройки на частоту GPS. В том случае, когда коррелятор имеет 8 параллельных каналов, это соответствует требованию обработки по меньшей мере восьми сегментов в одном периоде настройки на частоту GPS.
Так как время когерентной интеграции в поиске уровня 3 составляет 80 мс, что превышает период времени 20 мс, в течение которого модулируется бит данных на сигнале КА, когерентная интеграция в поиске уровня 3 выполняется с применением помощи чувствительности от УОМ, предоставляемой в задаче 416, чтобы учесть изменения битовой фазы, которые произойдут в течение 80 мс времени когерентной интеграции.
Предпочтительно все сегменты уровня 3 обрабатываются в одном периоде настройки на частоту GPS, однако понятно, что может потребоваться несколько периодов настройки частоты GPS для обработки сегментов уровня 3.
Затем выполняют задачу 816. В задаче 816 применяют обычную проверку на взаимную корреляцию для всех пиков, которые были идентифицированы. Эти пики включают в себя пики в группе S, идентифицированные при поиске уровня 1 или уровня 3, и пики в группе S'. Так как эта проверка известна, нет необходимости описывать ее подробно.
После задачи 816 выполняют задачу 818. В задаче 818 для каждого пика, идентифицированного как взаимная корреляция, устанавливают флаг насыщения RMSE или альтернативно тип измерения устанавливают на категорию отсутствующих, показывающую, что этот пик следует игнорировать для целей определения местоположения. После этого поиск уровня 3 заканчивается.
На фиг.13 проиллюстрирован вариант выполнения системы поиска сигналов определения местоположения в течение заданного периода времени. Как показано на чертеже, система содержит процессор 1302, запоминающее устройство 1304 и коррелятор 1306.
Коррелятор 1306 выполнен с возможностью формирования функций корреляции из сигналов, поступивших в него из приемника (не показан), и подачи их в процессор 1302 прямо или через запоминающее устройство 1304. Коррелятор 1306 можно реализовать в аппаратных средствах, программных средствах или их комбинации.
Запоминающее устройство 1304 содержит серию программных команд для выполнения любого из способов по фиг.2, 4-10 или их любых вариантов, реализаций или примеров, которые были описаны или предложены.
Процессор выполнен с возможностью доступа и исполнения программных команд, реализованных запоминающим устройством 1304. При исполнении этих команд процессор 1302 предписывает коррелятору 1306 осуществлять поиск сигналов определения местоположения как часть поиска уровня 0, уровня 1, уровня 2 или уровня 3 и извлекает измерения из полученных функций корреляции, поступивших в него из коррелятора 1306.
Если поиск является поиском уровня 1, процессор 1302 определяет, удовлетворяют ли измерения уровня 1 одному или более выбранным критериям достаточности измерений. Если критерии удовлетворены, процессор 1302 заканчивает поиск. Если нет, процессор 1302 предписывает коррелятору 1306 выполнить поиск уровня 2 или 3 для обнаружения сигналов определения местоположения.
На фиг.14 показан вариант выполнения абонентской станции в системе беспроводной связи. Эта конкретная абонентская станция выполнена с возможностью воплощения или содержания в себе системы, изображенной на фиг.13.
Радиоприемопередатчик 1406 выполнен с возможностью модуляции информации основной полосы, такой как речь или данные, на несущей ВЧ и демодуляции модулированной РЧ несущей для получения информации основной полосы.
Антенна 1410 выполнена с возможностью передачи модулированной РЧ несущей по каналу беспроводной связи и получения модулированной РЧ несущей по каналу беспроводной связи.
Основной процессор 1408 выполнен с возможностью подачи информации основной полосы из ЦПУ 1402 в приемопередатчик 1406 для передачи по каналу беспроводной связи. ЦПУ 1402, в свою очередь, получает информацию основной полосы из устройства ввода в пользовательском интерфейсе 1416. Процессор 1408 основной полосы также выполнен с возможностью подачи информации из приемопередатчика 1406 в ЦПУ 1402. ЦПУ 1402, в свою очередь, передает информацию основной полосы в устройство вывода в пользовательском интерфейсе 1416.
Пользовательский интерфейс 1416 содержит множество устройств для ввода или вывода пользовательской информации, такой как речь или данные. Устройства, обычно входящие в состав пользовательского интерфейса, включают в себя клавиатуру, экран, микрофон и динамик.
GPS-приемник 1412 выполнен с возможностью приема и демодуляции спутниковых передач GPS и передачи демодулированной информации в коррелятор 1418.
Коррелятор 1418 выполнен с возможностью извлечения функций корреляции GPS из информации, предоставленной ему GPS-приемником 1412. Для данного ПШ-кода коррелятор 1418 создает корреляционную функцию, определяемую в интервале кодовых фаз, который определяет окно поиска кодовой фазы, и в интервале гипотез доплеровской частоты. Каждую отдельную корреляцию выполняют в соответствии с определенными параметрами когерентной и некогерентной интеграции.
Коррелятор 1418 можно также сконфигурировать с возможностью извлечения связанных с контрольным сигналом функций из информации, относящейся к контрольным сигналам, переданным в него приемопередатчиком 1406. Эта информация используется абонентской станцией для получения услуг беспроводной связи.
Канальный декодер 1420 выполнен с возможностью декодирования канальных символов, переданных в него процессором 1408 основной полосы, в основные исходные биты. В одном примере, в котором канальные символы являются символами, кодированными сверточным кодом, канальный декодер является декодером Витерби. Во втором примере, в котором канальные символы являются последовательными или параллельными конкатенациями сверточных кодов, канальный декодер 1420 является турбодекодером.
Запоминающее устройство 1404 выполнено с возможностью хранения программных команд, воплощающих любой из способов, проиллюстрированных на фиг.2, 4-10, или любых вариантов, реализаций или примеров, которые были описаны или предложены.
ЦПУ 1402 выполнен с возможностью доступа к этим программным командам и их исполнения. При исполнении этих программных команд ЦПУ 1402 предписывает коррелятору 1418 выполнить поиски уровня 0, уровня 1, уровня 2 или уровня 3, в зависимости от случая, анализировать корреляционные функции, переданные в него коррелятором 1418, извлечь измерения из их пиков, и в случае измерений уровня 1 определить, удовлетворяют ли измерения уровня 1 выбранным критериям достаточности измерений и требуется ли поиск уровня 2 или 3 для фиксации местоположения объекта.
ЦПУ 1402 также выполнен с возможностью определения среднеквадратической ошибки (RMSE), связанной с каждым измерением. Эти измерения и значения RMSE подаются в УОМ (не показан). УОМ взвешивает каждое из измерений на основании обратной величины соответствующего значения RMSE, а затем оценивает местоположение абонентской станции на основании взвешенных измерений. Альтернативно абонентская станция сама оценивает собственное местоположение на основании этой информации.
Несмотря на то что были описаны различные варианты воплощения, реализации и примеры, специалистам будет понятно, что возможно множество других вариантов воплощения, реализаций и примеров в рамках объема притязаний настоящего изобретения. В частности, возможны варианты, в которых изобретение используется для поиска сигналов определения местоположения, содержащих передачи базовых станций или комбинации передач базовых станций и спутника GPS. Также возможны варианты, в которых изобретение расширяется на процедуры поиска, имеющие любое количество уровней режимов поиска, включающих конфигурации выше уровня 3. Возможны варианты с абонентскими станциями, в которых используются двойные РЧ решения в отличие от совместно используемых РЧ решений. Следовательно, объем настоящего изобретения не ограничен ничем, кроме прилагаемой формулы изобретения.


Заявлены способ и система для поиска сигналов определения местоположения с использованием нескольких режимов поиска с постепенно возрастающей чувствительностью, причем несколько режимов поиска включают в себя режим первого уровня, режим второго уровня и по меньшей мере один режим более высокого уровня. Если какой-нибудь из параметров окна поиска превышает заданные пределы, выполняют поиск первого уровня и в ответ на полученные результаты поиска уточняют параметры окна поиска таким образом, чтобы они находились в заданных пределах. Затем выполняют поиск второго уровня и получают измерения из полученных результатов поиска. Если эти измерения удовлетворяют выбранным критериям достаточности измерений, дополнительный поиск в попытке фиксации местоположения не выполняют. Если же измерения не удовлетворяют выбранным критериям достаточности измерений, выполняют поиск более высокого уровня с более высокой чувствительностью. Достигаемым техническим результатом изобретения является повышение точности фиксации местоположения объекта. 7 н. и 14 з.п ф-лы, 14 ил.
| US 6366599 В1, 02.04.2002 | |||
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2000 |
|
RU2178894C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1996 |
|
RU2082279C1 |
| Устройство задержки | 1983 |
|
SU1170597A1 |
| US 5500648 А, 19.03.1996 | |||
| US 2002118723 A1, 29.08.2002. | |||

