Предлагаемое изобретение относится к области измерительной техники и может найти применение, в частности, для измерения воздушно-скоростных параметров траектории полета Vв, Н, Vg, угла атаки α, коэффициента подъемной силы Cy, массы m самолета, положения центра тяжести Хт самолета в полете.
Известен аэродинамический способ измерения воздушных сигналов, в частности угла атаки α, угла скольжения β, и соответствующая система воздушных сигналов (СВС) для его осуществления.
Такой способ и устройства для его осуществления наиболее распространены в гражданской авиации. Сущность аэродинамического способа заключается в том, что измеряется разность давления, равная
 , где Рп - полное давление в точке, где скорость падает до нуля,
, где Рп - полное давление в точке, где скорость падает до нуля,
Рст. - статическое давление,
V - скорость самолета,
q - скоростной напор,
g - плотность воздушного потока.
Основным недостатком такого способа и его реализации является низкая точность измерения особенно при маневрах самолета и других динамических процессах, а также относительно высокая стоимость реализации данного способа, см. «Авиационные приборы и измерительные системы» (под редакцией Воробьева В.Г.) - М.: издательство «Транспорт», 1981 г. - 391 стр. «Измерители скорости полета, угла атаки скольжения, комплексные измерители высокоскоростных параметров», стр.166-213.
Наиболее близким способом измерения воздушно-скоростных параметров траектории полета является способ измерения аэродинамических углов с помощью бесфлюгерных измерителей, основанный на измерении и обработке сигналов с датчиков перепада давления, размещенных на искусственно введенных поверхностях на фюзеляже самолета: цилиндр, сфера, полусфера, конус, обтекаемые набегающим потоком воздуха при полете самолета.
Такие системы, реализующие бесфлюгерное измерение, выпускаются в настоящее время такими фирмами, как Automated Specialties в США, Ferranti Std в Англии, Fhomgou-GFS во Франции.
Основным недостатком такого способа и систем его реализации является ограниченный объем информации о параметрах траектории движения самолета (угол атаки, угол скольжения), а также необходимость вводить поправки для компенсации методических погрешностей, обусловленных влиянием поля аэродинамического давления самолета.
Целью предлагаемого изобретения является расширение функциональных возможностей, повышение точности измерения.
Цель достигается тем, что измерение перепада давления и обработка информации осуществляется на непосредственно несущих аэродинамических поверхностях самолета, например на крыле, горизонтальном оперении, вертикальном оперении.
По сигналам датчиков перепада давления, размещенных на этих поверхностях, эти сигналы обрабатываются по расчитанным автором математическим функциональным зависимостям, по которым и определяются искомые параметры траектории полета.
На фиг.1 представлена блок-схема устройства, реализующего предлагаемый способ аэромеханического измерения параметров траектории полета.
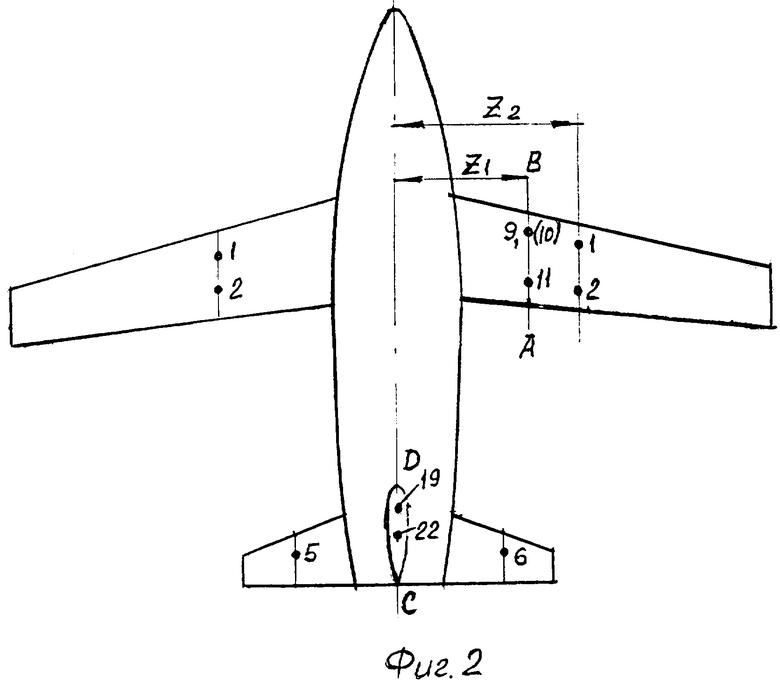
На фиг.2 - место размещения датчиков перепада давления на крыле и горизонтальном оперении.
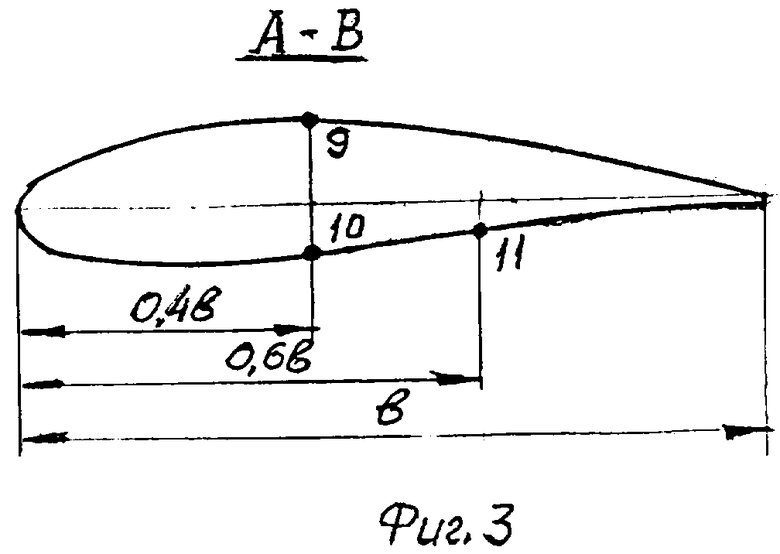
На фиг.3 - место размещения датчиков перепада давления в сечении АВ крыла.
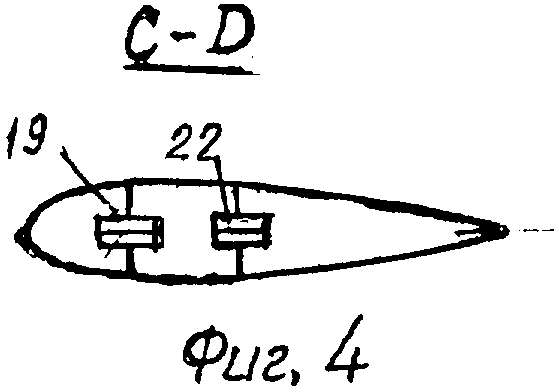
На фиг.4 изображено место размещения датчика перепада давления на вертикальном оперении.
Функциональная схема устройства, реализующего предлагаемый способ, содержит блоки и связи между ними:
1, 2, 5, 6, 9, 10, 11, 19, 22 - датчики перепада давления;
3, 4, 7, 8, 12, 13-А, 14-А, 20 - функциональные преобразователи (усилители);
13, 14, 15, 16, 17, 18, 21 - указатели (с индикацией измеряемых искомых параметров).
В предлагаемом аэромеханическом способе измерение воздушного давления производят непосредственно на несущих поверхностях самолета в специально выбранных точках, согласно конструктивно-аэродинамических свойств несущих поверхностей самолета.
Реализуется предлагаемый способ следующим образом.
Перепады давления измеряют с помощью датчиков 1 и 2 в точках, равноудаленных по размаху крыла, см. фиг.2, обрабатывают по заданной функциональной зависимости в функциональном преобразователе (блок 3), на выходе которого получают сигнал пропорцианальности коэффициенту подъемной силы Су, который с помощью функционального усилителя 13-А преобразуют в сигнал, пропорциональный углу атаки α в данном сечении крыла, который затем индуцируют с помощью указателя угла атаки 13.
Сигнал перепада давления с датчика давления 2 и выходной сигнал с блока 3 обрабатывают по заданной функциональной зависимости с помощью функционального преобразователя (блок 4) и получают сигнал, пропорциональный скоростному напору q, который с помощью функционального усилителя 14-А преобразует этот сигнал в сигнал, пропорциональной указателю скорости VВ, а затем его индуцирует с помощью указателя скорости 14, при этом сигналы с выходов усилителей 13-А, 14-А и указателя 14 передаются на блок 18.
Сигналы перепада давления, измеренные с помощью датчиков 5 и 6, а также сигнал с блока 3 с помощью функционального преобразователя (блок 7) обрабатывают по заданной функциональной зависимости и получают сигнал, пропорциональной массе m самолета, индуцируемый указателем массы самолета 15.
Сигналы перепада давлений, измеренные датчиками 5 и 6, а также сигналы с выходов функциональных преобразователей (блоки 3 и 4) обрабатывают с помощью функционального преобразователя (блок 8) по заданной функциональной зависимости и получают сигнал, пропорциональный координате положения центра тяжести самолета ХТ, и индицируют его на индикаторе указателя 16.
Сигналы перепада давления, измеренные датчиками 9, 10, 11, обрабатывают с помощью функционального преобразователя 12, на выходе которого получают сигнал, пропорциональный статическому давлению Рст, который индицируется на индикаторе указателя 17.
Перепады давлений измеряют датчиками 19 и 22 и в виде сигналов поступают на функциональные преобразователь 20, в котором эти сигналы обрабатывают по заданной функциональной зависимости, и на выходе блока 20 эти сигналы становятся пропорциональными углу скольжения β и индицируются на индикаторе указателя 21.
Обработку сигналов с датчиков перепада давлений осуществляют с помощью разработанными автором математическими соотношениями, отражающими функциональные зависимости измеряемых перепадов давления на поверхности самолета, в частности на поверхности по хорде крыла.
Так, например, напряжение с выходов датчиков 1 и 2, поступающие на вход функционального преобразователя 3, преобразуются на его выходе в соотношение
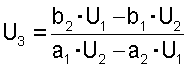
где: b1, b2, а1, а2 - постоянные коэффициенты, зависящие от конструктивных особенностей крыла;
U1, U2 - выходные напряжения датчиков перепада давления 1 и 2;
U3 - выходное напряжение функционального преобразователя 3.
Величина напряжения U3 пропорциональна коэффициенту подъемной силы Cy, а с помощью функционального усилителя 13 напряжение U3 преобразуется в напряжение (сигнал), пропорциональный углу атаки α.
Выходные напряжения U2 и U3 преобразовываются в функциональном блоке 4 в напряжение U4, пропорциональное скоростному напору q самолета.
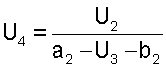
где U2 - выходное напряжение датчика перепада давления 2;
a2, b2 - постоянные коэффициенты, зависящие от конструктивных особенностей крыла;
U3 - выходное напряжение функционального преобразователя 3, которое можно выразить еще и как функцию
U3=K3·Cy(Zj)
где Zj - расстояние от продольной оси самолета до хорды крыла, где размещены датчики перепада давления;
Cy - коэффициент подъемной силы;
K3 - коэффициент, зависящий от конструктивных особенностей крыла самолета.
Выходные напряжения U3, U4, U5 преобразовываются в выходное напряжение U7 функционального преобразователя 7 в соотношение

где U7 - выходное напряжение функционального преобразователя 7, пропорциональное массе m самолета в полете;
c, c1, c2 - коэффициенты, зависящие от конструктивных особенностей крыла самолета и горизонтального оперения, причем коэффициент c=g·Cosθ, где g=9,8 м/с2, θ - угол наклона траектории полета самолета. Это соотношение предполагает, что полет самолета горизонтальный, т.е. θ=0.
Выходные напряжения U3, U4, U5, U6, поступающие на вход функционального преобразователя 8, преобразовываются на его выходе в напряжение U8, представляющее соотношение в виде
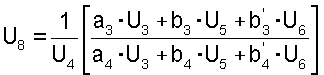
где U8 - выходное напряжение функционального преобразователя 8;
a3, a4, b3, b4, b'3, b'4 - постоянные коэффициенты, зависящие от конструктивных особенностей крыла и горизонтального оперения.
Выходное напряжение U8 пропорционально координате центра тяжести ХТ самолета.
Обработку сигналов (напряжений) с датчиков перепада давления U9, U10, U11 осуществляют с помощью функционального преобразователя 12, выходное напряжение которого пропорционально статическому давлению Рст и которое представляет собой математическое соотношение
U12=K1·U9+K2·U10+K3·U11
где K1, K2, K3 - известные коэффициенты, зависящие от конструктивных особенностей крыла самолета.
Выходные напряжения U19 и U22 датчиков перепадов давления 19, 22, которые размещают на поверхности вертикального оперения (см. фиг.4), преобразуются в функциональном преобразователе 20 следующим образом:
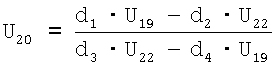
где U20 - выходное напряжение функционального преобразователя 20, пропорциональное углу скольжения β;
d1, d2, d3, d4 - известные коэффициенты, зависящие от конструктивных особенностей вертикального оперения.
Устройство, реализующее способ измерения воздушно-скоростных параметров траектории полета, представлено в виде структурно-функциональной блок-схемы (см. фиг.1).
Датчики перепада давления 1 и 2, которые установлены на верхней и нижней поверхности профиля крыла, своими выходами связаны со входами функционального усилителя (преобразователя) 3. Выход блока 3 и второй выход датчика 2 связан с входом функционального усилителя 4, выход блока 4, выход блока 3 связаны с входами усилителей 13-А и 14-А, а также со входом усилителя 14, выход которого связан с функциональным преобразователем 18.
Датчики 5 и 6, установленные на горизонтальном оперении и руле высоты, своими выходами соединены с входами функциональных преобразователей 7 и 8, два других входа которых связаны с блоками 3 и 4.
Выходы блоков 7 и 8 связаны с входами указателей 15 и 16 соответственно.
Датчики перепадов давления 9, 10, 11, установленные в трех точках одного сечения АВ крыла (см. фиг.3), своими выходами связаны с входом функционального преобразователя 12.
Выход блока 12 соединен с входом указателя 17.
Датчики перепадов давления 1 и 22, установленные на поверхности вертикального оперения в точках, указанных на фиг.4, связаны своими выходами с входом функционального преобразователя 20, выход которого соединен с входом указателя 21.
Работает устройство следующим образом.
Сигналы с выходов датчиков перепада давления 1 и 2, пропорциональные перепадам давления на верхней и нижней поверхности профиля крыла, поступают на функциональный усилитель 3, сигнал с выхода датчика 2 и сигнал с выхода функционального усилителя 3 поступают на вход функционального усилителя 4. Сигналы с выходов блоков 3 и 4 поступают на указатели 13 и 14 через блоки 13-А и 14-А, с выходов которых, а также с выхода блока 14, сигналы поступают на вход функционального преобразователя 18.
Сигналы с датчиков перепада давлений 5 и 6, пропорциональные перепадам давления на горизонтальном оперении и руле высоты, поступают на входы функциональных преобразователей 7 и 8, на другие входы которых поступает также сигнал с блока 3. При этом сигнал с выхода датчика 5 одновременно поступает на преобразователь 8.
Сигналы с выходов блоков 7 и 8 поступают на вход указателей (индикаторов) 15 и 16 соответственно.
Сигналы с датчиков перепада давления 9, 10, 11, пропорциональные перепадам давления в трех точках одного сечения крыла (см. фиг.3), поступают на вход функционального преобразователя 12, с выхода которого сигнал в свою очередь поступает на вход усилителя 17.
Сигналы с датчиков перепада давления 19 и 22, пропорциональные перепадам давления на поверхности вертикального оперения, в точках, где установлены эти датчики, поступает на вход функционального преобразователя 20, с выхода которого сигнал поступает на вход указателя 21, где и индицируется. Все датчики перепадов давления оснащены фильтрами выходного высокочастотного напряжения и конструктивно выполнены в виде блоков.
В настоящее время предлагаемый способ аэромеханического измерения воздушно-скоростных параметров траектории полета и устройство для его осуществления с применением разработанной автором математической обработкой сигналов с датчиков перепада давления, установленных непосредственно на поверхности самолета, были опробованы на нескольких самолетах и вертолетах. Получены положительные результаты с рекомендациями серийного применения предлагаемого технического решения, на что имеются соответствующие документы от ОКБ им. Ильюшина ОКБ им. Миля.
Источники информации
«Авиационные приборы и измерительные системы» (под редакцией Воробьева В.Г.) - М.: издательство «Транспорт», 1981 г. - 391 стр. «Измерители скорости полета, угла атаки скольжения, комплексные измерители высокоскоростных параметров», стр.166-213.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОМЕХАНИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ СОСТОЯНИЯ ВЕРТОЛЕТА В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2352914C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТНОГО НАПОРА НА ЛОПАСТИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2001 |
|
RU2187821C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| Устройство для стабилизации крена самолета | 1973 |
|
SU531332A1 |
| Система автоматического управления и стабилизации параметров траектории летательного аппарата | 1971 |
|
SU479088A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ ВЕРТОЛЕТА В ГОРИЗОНТАЛЬНОМ ПОЛЕТЕ | 2001 |
|
RU2196305C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ОДНОМЕСТНЫЙ САМОЛЕТ С КОМПЛЕКСНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2016 |
|
RU2630030C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
Изобретение относится к области измерительной техники и может найти применение, в частности, для измерения воздушно-скоростных параметров траектории полета самолета, в частности таких как скоростной напор, угол атаки, коэффициент подъемной силы, массы самолета, положение центра тяжести самолета и так далее. Устройство измерения воздушно-скоростных параметров траектории полета состоит из группы датчиков перепада давления, группы функциональных преобразователей, усилителей, группы указателей. Работа устройства заключается в обработке напряжений выходных сигналов с датчиков перепада давления, установленных в соответствующих специально выбранных точках аэродинамической поверхности самолета. Измеренные сигналы с датчиков перепада давлений преобразуют с помощью функциональных преобразователей устройства и по заданным функциональным зависимостям вычисляют величины выходных напряжений функциональных преобразователей, пропорциональных искомым воздушно-скоростным параметрам траектории полета. Технический результат: расширение функциональных возможностей, повышение точности измерения. 1 з.п. ф-лы, 4 ил.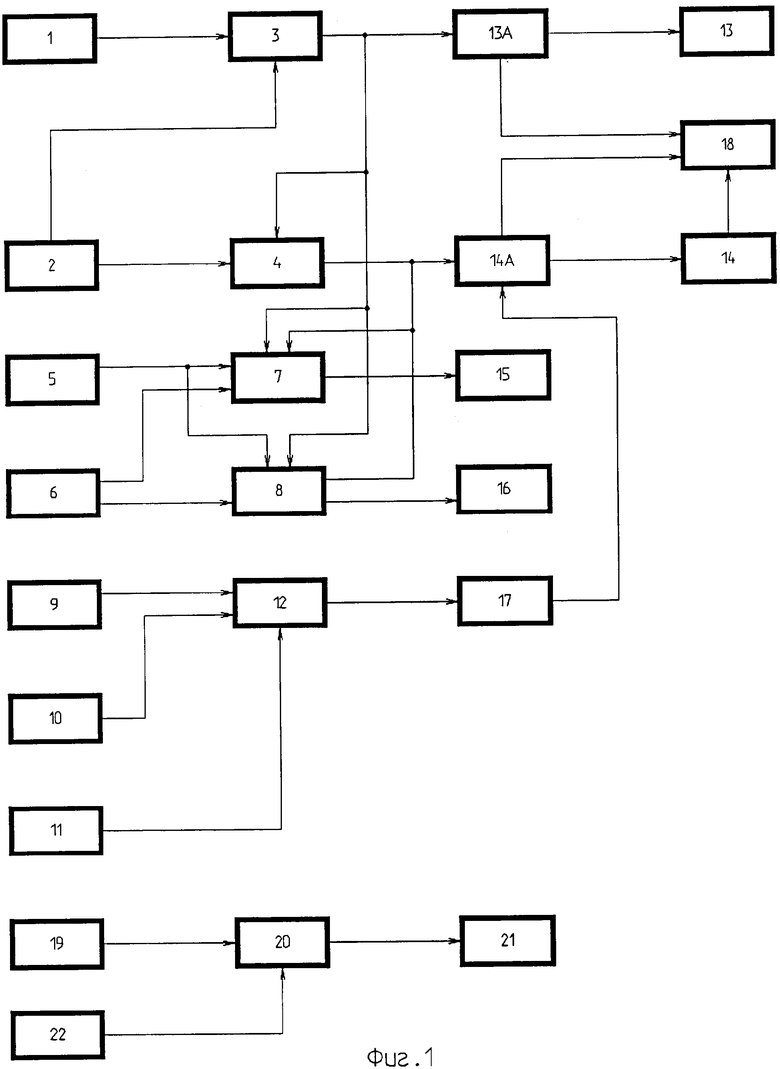
| ВЕЗИКУЛЫ С РЕГУЛИРУЕМЫМ ВЫСВОБОЖДЕНИЕМ АКТИВНЫХ ИНГРЕДИЕНТОВ | 1994 |
|
RU2160093C2 |
| WO 03087847 А1, 23.10.2003 | |||
| JP 8310495 А, 26.11.1996 | |||
| DE 3639398 С1, 03.03.1988 | |||
| Устройство для стабилизации крена самолета | 1973 |
|
SU531332A1 |
| Устройство для удаления шелухи из заторов в спиртовом производстве | 1935 |
|
SU46860A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |

