Изобретение относится к классу измерительной техники и может быть использовано в информационно-измерительных системах и системах управления вертолетом.
Известно устройство (Arnoltbmil, Poits Herman, Pichter Peter. Регулирующее устройство несущего винта вертолета. Патент ФРГ, МКИ В 64 D 27/26, 1481601, заявлено 3.01.66 г., опубл. 8.03.73 г.) - [1] для регулировки тяги несущего винта вертолета, содержащее тензометрические датчики упругих деформаций, расположенные на каждой лопасти в разных точках. Сигналы с датчиков, соответствующие напряжениям изгиба лопасти и зависящие от подъемной силы винта, подаются на вычислительное устройство. Недостатком устройства является значительная погрешность измерения тяги несущего винта вертолета за счет сильного влияния изменения температуры окружающей среды на работу тензометрических датчиков.
Известное устройство для определения веса вертолета с несущим винтом над фюзеляжем, образованным несколькими лопастями, установленными в ступице на вращающемся валу, приводящим лопасти во вращение, содержит датчики частоты вращения несущего винта и продольной скорости движения, согласующее устройство, вычислитель и индикатор, причем выход согласующего устройства соединен со входом вычислителя, подключенного к индикатору (США, патент 5229956, 20.07.1993 г., G 01 G 9/00, опубл. РЖ ИСМ. Вып. 82, 1, 1995 г.) - [2].
Это устройство выбрано для сравнительного анализа с предлагаемым техническим решением.
Недостатком данного устройства является недостаточная точность определения массы вертолета в горизонтальном полете.
Изобретение решает задачу повышения точности определения массы вертолета в горизонтальном полете за счет реализации наиболее совершенного способа определения статического давления на вертолете.
Это достигается тем, что в устройство для определения массы вертолета в горизонтальном полете, содержащее датчики частоты вращения несущего винта и продольной скорости движения, согласующее устройство, вычислитель и индикатор, причем выход согласующего устройства соединен со входом вычислителя, подключенного к индикатору, введены три интегратора, преобразователь частоты в напряжение, датчик температуры воздуха за бортом и три датчика давления, каждый из которых подсоединен к своему дренажному отверстию на поверхности лопасти, которые расположены в одном сечении лопасти на расстоянии r=0,7R от оси вращения несущего винта, где R - радиус несущего винта, при этом первое дренажное отверстие расположено на нагнетающей стороне лопасти на расстоянии ~ 0,4 хорды от передней кромки, второе - на засасывающей стороне лопасти на том же расстоянии, а третье - на нагнетающей стороне лопасти на расстоянии ~ 0,6 хорды от передней кромки, при этом каждый датчик давления соединен со входом своего интегратора, входы управления которых и вход преобразователя частоты в напряжение соединены с датчиком частоты вращения несущего винта, выходы интеграторов, преобразователя частоты в напряжение, датчиков продольной скорости движения и температуры воздуха за бортом подключены ко входам согласующего устройства.
Для пояснения сущности изобретения на фиг.1 представлена блок-схема устройства, где:
1, 2, 3 - датчики давления, воспринимающие давления соответственно в первой, второй и третьей точках на поверхности лопасти;
4, 5, 6 - интеграторы;
7 - датчик частоты вращения несущего винта;
8 - преобразователь частоты в напряжение;
9 - датчик продольной скорости движения вертолета;
10 - датчик температуры воздуха за бортом;
11 - согласующее устройство;
12 - вычислитель;
13 - индикатор.
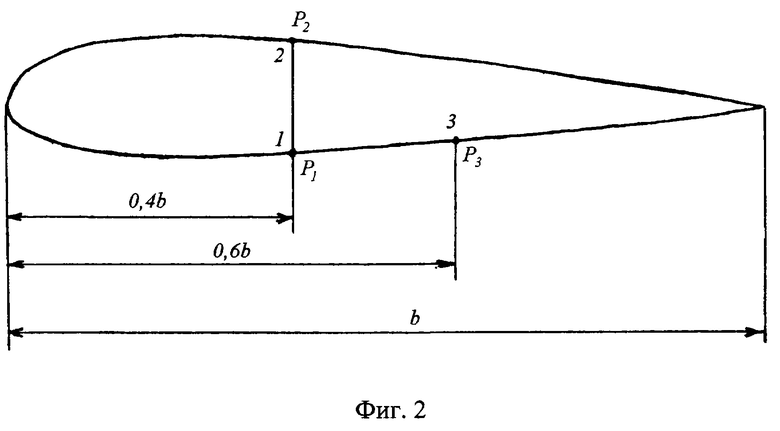
В устройстве каждый из датчиков давления 1, 2, 3 подключен к своему дренажному отверстию на поверхности лопасти, которые расположены в одном сечении лопасти на расстоянии r=0,7R, при этом первое дренажное отверстие расположено на нагнетающей стороне лопасти на расстоянии ~0,4 хорды от передней кромки, второе - на засасывающей стороне лопасти на том же расстоянии, а третье - на нагнетающей стороне лопасти на расстоянии ~0,6 хорды от передней кромки. Каждый датчик давления 1, 2, 3 соединен со входом своего интегратора 4, 5, 6, входы управления которых и вход преобразователя частоты в напряжение 8 соединены с датчиком частоты вращения 7 несущего винта. Выходы интеграторов 4, 5, 6, преобразователя частоты в напряжение 8, датчиков продольной скорости движения 9 и температуры воздуха за бортом 10 подключены ко входам согласующего устройства 11, выход которого соединен с вычислителем 12, подключенным к индикатору 13.
Устройство работает следующим образом. Сигналы с датчиков давления 1, 2, 3 пропорциональны давлениям P1, Р2 и Р3, снимаемым в точках поверхности лопасти в сечении r=0,7R, расположение которых представлено на фиг.2, где b - хорда сечения несущего винта (НВ), поступают на интеграторы 4, 5 и 6, на входы управления которых подается также сигнал с датчика частоты вращения несущего винта вертолета. Интеграторы 4, 5 и 6 вырабатывают сигналы, пропорциональные осредненным за один оборот несущего винта значениям давлений 

где τ - период вращения НВ.
Одновременно сигнал с датчика частоты вращения 7 НВ поступает на вход преобразователя частоты в напряжение 8. Далее выходные сигналы интеграторов 4, 5 и 6, преобразователя частоты в напряжение 8, датчика продольной скорости движения вертолета 9 и датчика температуры воздуха за бортом 10 поступают на согласующее устройство 11, которое преобразует их в цифровые коды, поступающие на вычислитель 12. Вычислитель 12 вычисляет величину массы вертолета и полученный результат отображается на индикаторе 13. Вычислитель 12 реализует следующий алгоритм:
где μ - коэффициент режима работы НВ;
Vx - продольная скорость движения вертолета;
ω - частота вращения НВ;
R - радиус НВ вертолета;
М - среднее за один оборот НВ значение числа Маха на конце лопасти;
a - скорость звука за бортом;
ρ - плотность воздуха за бортом; осредненный за один оборот НВ коэффициент перепада давления, замеренного в точках 1 и 2 поверхности лопасти (фиг.1);
осредненный за один оборот НВ коэффициент перепада давления, замеренного в точках 1 и 2 поверхности лопасти (фиг.1);
Ст - коэффициент тяги НВ вертолета;
m - масса вертолета;
g - ускорение свободного падения.
Скорость звука и плотность воздуха за бортом вычисляются по формулам (Акимов А. И. , Берестов А.М., Михеев Р.А. Летные испытания вертолетов. М., Машиностроение, 1980) - [3].
где Pст - величина статического давления за бортом;
to - температура воздуха за бортом.
В свою очередь величина статического давления Рст вычисляется через значения осредненных за один оборот НВ давлений  по формуле (Цветков Л. Г., Живетин В.Б. К задаче ограничения воздушно-скоростных параметров движения вертолета. Тезисы доклада IV Всесоюзной научно-практической конференции по безопасности полетов "Безопасность и эффективность эксплуатации воздушного транспорта" (секция Аэродинамика и динамика полета). АГА, Ленинград, 1985 - [4]; Цветков Л.Г., Живетин В.Б. К вопросу предупреждения режима "вихревого кольца". Тезисы доклада V Всесоюзной научно-практической конференции по безопасности полетов "Безопасность полетов и профилактика авиационных происшествий" (секция Аэродинамика и динамика полета). АГА, Ленинград, 1988) - [5].
по формуле (Цветков Л. Г., Живетин В.Б. К задаче ограничения воздушно-скоростных параметров движения вертолета. Тезисы доклада IV Всесоюзной научно-практической конференции по безопасности полетов "Безопасность и эффективность эксплуатации воздушного транспорта" (секция Аэродинамика и динамика полета). АГА, Ленинград, 1985 - [4]; Цветков Л.Г., Живетин В.Б. К вопросу предупреждения режима "вихревого кольца". Тезисы доклада V Всесоюзной научно-практической конференции по безопасности полетов "Безопасность полетов и профилактика авиационных происшествий" (секция Аэродинамика и динамика полета). АГА, Ленинград, 1988) - [5].

где k1, k2, k3 - константы, определенные для конкретного профиля лопасти и места расположения точек съема давлений P1, Р2 и P3 на ее поверхности.
Функциональная зависимость (4) коэффициента тяги HВ Ст от коэффициента режима работы НВ μ, числа Маха М на конце лопасти и коэффициента  перепада давления может быть получена теоретическим или экспериментальным путем для конкретного несущего винта.
перепада давления может быть получена теоретическим или экспериментальным путем для конкретного несущего винта.
Оценка точности определения массы вертолета в полете с помощью предлагаемого устройства показала, что если инструментальная погрешность измерения давления составляет ΔР= 30 Па, погрешность измерения продольной скорости движения вертолета оценивается величиной ΔVx=5 км/ч, инструментальная погрешность измерения частоты вращения НВ составляет Δω ==0,1 рад/с, а температура воздуха за бортом определяется с точностью Δto=1o, то относительная погрешность определения массы вертолета в полете не превышает 1-2%.
Заявленное устройство может быть реализовано с использованием серийно выпускаемых комплектующих изделий.
Источники информации
1. В качестве датчиков давления могут быть использованы любые стандартные датчики, вырабатывающие электрический сигнал, пропорциональный давлению воздуха (Браславский Д.А. Приборы и датчики летательных аппаратов. М., Машиностроение, 1970 г., 392 с.).
2. Преобразователь частоты в напряжение 8 и интеграторы 4, 5 и 6 могут быть выполнены по известным схемам (Титце У., Шенк К. Полупроводниковая схемотехника. М., Мир, 1982г., 512 с.).
3. Датчик продольной скорости 9 - приемник воздушного давления, например, ПВД-5 с измерительным преобразователем типа ИКД27ДА или ИКД27ДФ.
4. Датчик частоты вращения несущего винта 7 - штатный датчик типа Д-1.
5. Датчик температуры воздуха за бортом 10 - датчик типа П-5 с измерительным преобразователем.
6. Согласующее устройство 11 - может быть использован модуль аналогового типа 15КА-60/8-10.
7. Вычислитель 12 - может быть использована бортовая ЭВМ, однокристальная микро-ЭВМ серии 180б, 1813 и т.п.
8. Индикатор 13 - цифровой вольтметр, например, типа КАЦ 202, АЛС-324, на которых величина массы вертолета отображается непосредственно в цифрах.
Применение заявленного устройства по сравнению с прототипом позволяет решить задачу повышения точности определения массы вертолета в полете.
Изобретение относится к измерительной технике и может быть использовано в информационно-измерительных системах и системах управления вертолетом. Устройство содержит три датчика давления (1, 2, 3), каждый из которых соединен со своим дренажным отверстием на поверхности лопасти, которые расположены в одном сечении лопасти на расстоянии r - 0,7R от оси несущего винта, где R - радиус несущего винта. Первое дренажное отверстие расположено на нагнетающей стороне лопасти на расстоянии 0,4 хорды от передней кромки, второе - на засасывающей стороне лопасти на том же расстоянии, а третье - на нагнетающей стороне лопасти на расстоянии 0,6 хорды от передней кромки. Каждый датчик давления (1, 2, 3) соединен со входом своего интегратора (4, 5, 6), входы управления которых и вход преобразователя частоты в напряжение (8) соединены с датчиком частоты вращения несущего винта (7), выходы интеграторов (4, 5, 6), преобразователя частоты вращения в напряжение (8), датчиков продольной скорости движения (9) и температуры воздуха за бортом (10) подключены ко входам согласующего устройства (11), выход которого соединен со входом вычислителя (12), подключенного к индикатору (13). Технический результат - повышение точности определения массы вертолета в полете. 2 ил.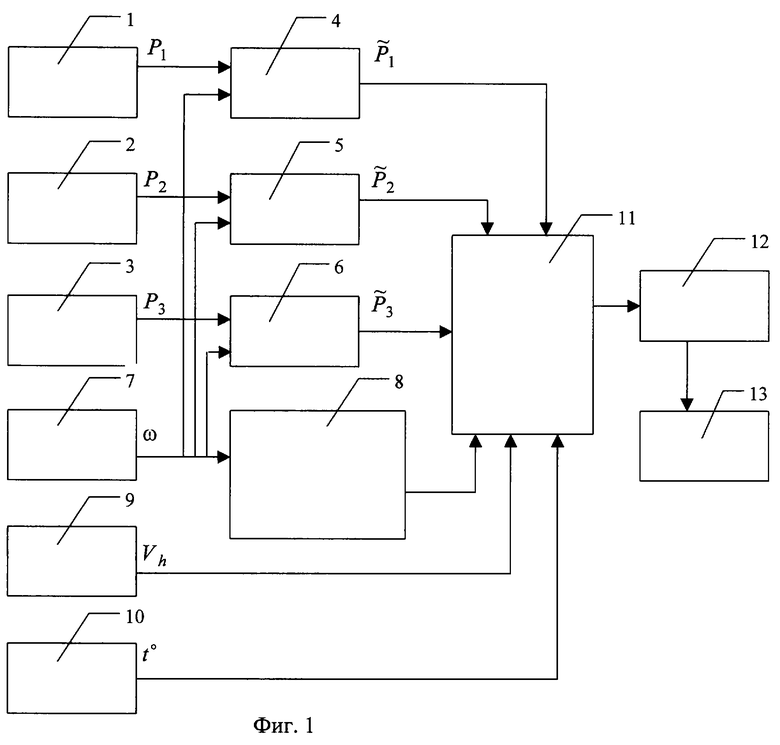
Устройство для определения массы вертолета в горизонтальном полете, содержащее датчики частоты вращения несущего винта и продольной скорости движения, согласующее устройство, вычислитель и индикатор, причем выход согласующего устройства соединен со входом вычислителя, подключенного к индикатору, отличающееся тем, что в него введены три интегратора, преобразователь частоты в напряжение, датчик температуры воздуха за бортом и три датчика давления, каждый из которых подсоединен к своему дренажному отверстию на поверхности лопасти, которые расположены в одном сечении лопасти на расстоянии r= 0,7R от оси вращения несущего винта, где R - радиус несущего винта, при этом первое дренажное отверстие расположено на нагнетающей стороне лопасти на расстоянии 0,4 хорды от передней кромки, второе - на засасывающей стороне лопасти на том же расстоянии, а третье - на нагнетающей стороне лопасти на расстоянии 0,6 хорды от передней кромки, при этом каждый датчик давления соединен со входом своего интегратора, входы управления которых и вход преобразователя частоты в напряжение соединены с датчиком частоты вращения несущего винта, выходы интеграторов, преобразователя частоты в напряжение, датчиков продольной скорости движения и температуры воздуха за бортом подключены ко входам согласующего устройства.
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ДЛИННОМЕРНОГО ИЗДЕЛИЯ, НАПРИМЕР ЛОПАСТИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 1994 |
|
RU2084839C1 |
| US 5229956 А, 20.07.1993 | |||
| СПОСОБ ЛЕЧЕНИЯ РАДИАЦИОННЫХ ПОРАЖЕНИЙ ОРГАНИЗМА И СПОСОБ ПОЛУЧЕНИЯ ПРЕПАРАТА ДЛЯ ЛЕЧЕНИЯ РАДИАЦИОННЫХ ПОРАЖЕНИЙ ОРГАНИЗМА | 1997 |
|
RU2169572C2 |
| US 4574360 А, 04.03.1986. | |||
