Изобретение относится к грузозахватным устройствам и может быть использовано во всех отраслях народного хозяйства для захвата киповых грузов, состоящих из материалов, допускающих прокол стальным стержнем.
Известно захватное устройство для киповых грузов, содержащее несущую раму с закрепленными на ней захватными приспособлениями, каждое из которых включает в себя захватный орган, состоящий из цилиндрического ползуна с жестко закрепленными на нем штопорами, прикрепленное к несущей раме основание, связанный с последним кожухом и размещенный в нем стакан, связанный с приводом захватных органов и с ползуном, кинематически связанным дополнительно с кожухом (А.С. №678026, кл. В66F 9/18, опубл. 05.08.79, Бюл. №29).
Недостатками известного захватного устройства является то, что его приводные захватные органы, оканчивающиеся штопорами, постоянно открыты, что является источниками опасности, ненадежность работы из-за большого количества деталей, высокая металлоемкость.
Наиболее близким по технической сущности, достигаемому эффекту является устройство для киповых грузов, содержащее несущую раму с закрепленными на ней захватными приспособлениями, каждое из которых включает захватный орган, состоящий из цилиндрического ползуна с жестко закрепленным на нем штопором, и прикрепленное к несущей раме основание, связанный с последним кожух, а кинематическая связь ползуна и кожуха каждого захватного приспособления представлена в виде винтовой пары, шаг которой равен шагу витков штопора (А.С. №1106780 А, В66С 1/10. Опубл. 25.05.83. Бюл. №29).
Недостатком прототипа является сложность конструкции привода-мотор-редуктор из-за большого количества деталей, ненадежность в работе и высокая металлоемкость. Захватное устройство содержит несколько штопоров, которые оснащены индивидуальными приводами, что приводит к высоким энергозатратам, невозможности применения в помещениях повышенной пожароопасности.
Технической задачей изобретения является упрощение конструкции и повышение надежности работы устройства вследствие наличия одного привода, упрощение режима работы, снижение металлоемкости. В предлагаемом устройстве штопоры после рабочего цикла убираются в раму, что обеспечивает безопасность обслуживания устройства.
Поставленная техническая задача достигается тем, что в захватном устройстве для киповых грузов, содержащем несущую раму с закрепленными на ней захватными приспособлениями, включающими захватные органы, в виде штопоров и прикрепленное к несущей раме основание, новым является то, что снабжено механизмом вращательного и возвратно-поступательного движения штопоров, выполненным в виде винтовой передачи, подвижной плитой, связанной со штоком силового пневмоцилиндра дифференциального действия, на которой смонтированы подшипники и направляющие штанги, расположенные во втулках схвата, при этом один конец винтовой передачи соединен с подшипниками, а другой - со штопором.
Технический результат изобретения заключается в упрощении конструкции и повышении надежности работы устройства вследствие наличия одного привода, в упрощении режима работы, снижении металлоемкости, повышении безопасности обслуживания и работы устройства, т.к. во-первых, в предлагаемом устройстве штопоры после рабочего цикла убираются в раму, во-вторых, переход от электрического привода к пневматическому позволяет эксплуатацию в любых помещениях повышенной пожароопасности.
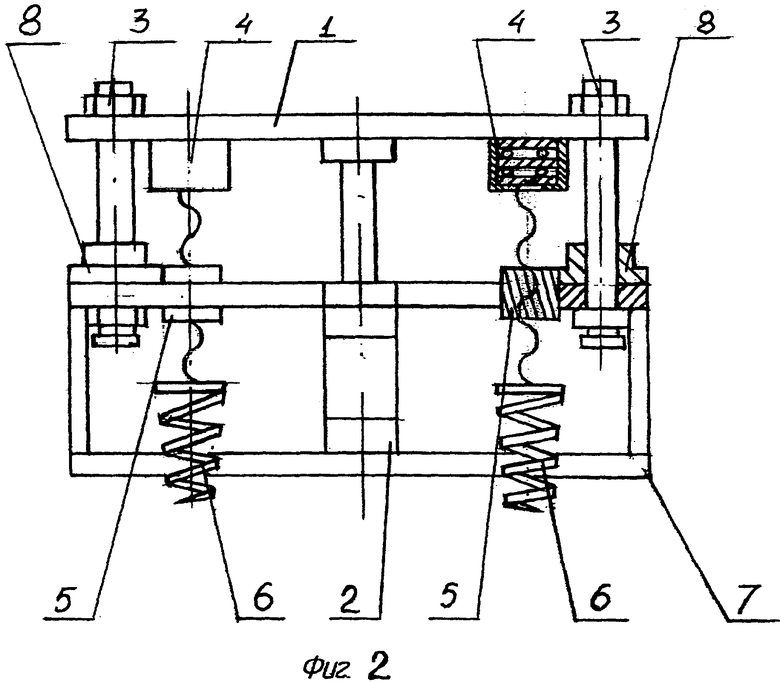
На фиг.1 схематично изображено устройство, подвешенное на крюк грузоподъемной машины; на фиг.2 схематично изображено отдельное кипозахватное приспособление с пневмоприводом.
Захватное устройство для киповых грузов состоит из нескольких отдельных захватных приспособлений (фиг.2), установленных на подвижной плите 1, которая связана со штоком силового пневмоцилиндра дифференциального действия 2 и направляющими штангами 3, на подвижной плите также смонтированы подшипники 4, которые соединены с одними концами винтов винтовых передач 5, а другие концы передачи соединены со штопорами 6. Смонтировано захватное устройство на несущей раме 7, на которой расположены также направляющие втулки 8. Переносимые кипы 9.
Устройство работает следующим образом.
Несущая рама 7 прижимается к кипам 9 до упора, после чего срабатывает силовой цилиндр дифференциального действия 2, который приводит в движение подвижную плиту 1, которую удерживают направляющие штанги 3, расположенные во втулках 8 схвата. При опускании подвижной плиты винтовая передача 5 приводится в движение и штопор 6 ввинчивается в кипы 9, далее происходит остановка штока пневмоцилиндра 2. После переноса кип 9 происходит обратное движение штока силового цилиндра 2, и штопоры вывинчиваются из кип. Затем несущая рама отводится, и захватное устройство освобождается от кип.
Конструкция предлагаемого устройства позволяет:
- исключить повреждение от открытого рабочего органа;
- улучшить работу механизма в целом;
- сэкономить энергоресурсы;
- обеспечить безопасные условия эксплуатации в любых помещениях повышенной пожароопасности, так как использование сжатого воздуха более экономично и безопасно.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КИПОВЫХ ГРУЗОВ | 2006 |
|
RU2307781C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КИПОВЫХ ГРУЗОВ | 2006 |
|
RU2307782C1 |
| Захватное устройство для киповых грузов | 1983 |
|
SU1106780A1 |
| Установка для автоматической штамповки | 1980 |
|
SU867671A1 |
| Грузозахватное устройство | 1976 |
|
SU763233A1 |
| Навесное захватное приспособление к погрузчику | 1976 |
|
SU678026A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Устройство для разделения на отрезки выполненного в виде рукава полотна к мешкоделательной машине | 1979 |
|
SU974932A3 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| СТАНОК ДЛЯ ОБРАБОТКИ КИРПИЧА | 2001 |
|
RU2193967C1 |
Изобретение относится к грузозахватным устройствам. Захватное устройство для киповых грузов содержит несущую раму с закрепленными на ней захватными приспособлениями, включающими захватные органы в виде штопоров, и прикрепленное к несущей раме основание. Механизм вращательного и возвратно-поступательного движения штопоров выполнен в виде винтовой передачи. Подвижная плита связана со штоком силового пневмоцилиндра дифференциального действия, на которой смонтированы подшипники и направляющие штанги, расположенные во втулках схвата. Один конец винтовой передачи соединен с подшипниками, а другой - со штопорами. Достигается упрощение конструкции, повышение надежности работы устройства вследствие наличия одного привода, упрощение режима работы, снижение металлоемкости, обеспечение безопасности эксплуатации в любых помещениях повышенной пожароопасности. 2 ил.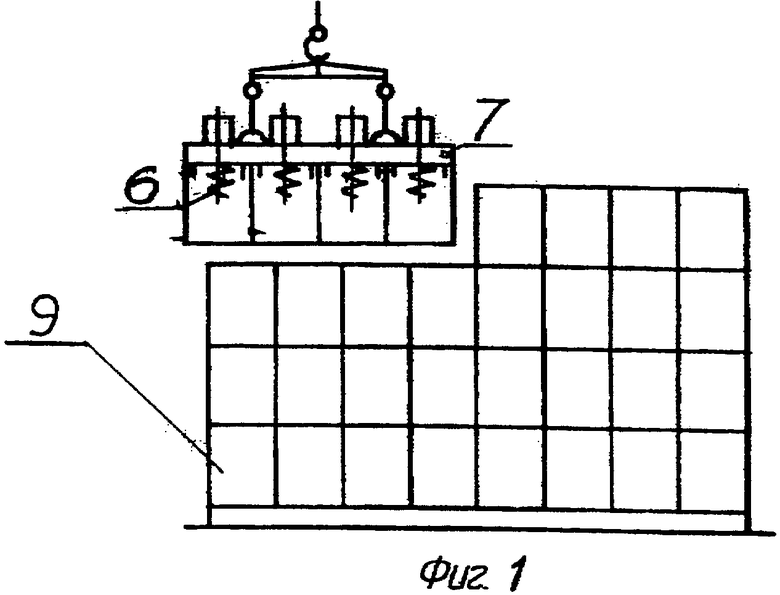
Захватное устройство для киповых грузов, содержащее несущую раму с закрепленными на ней захватными приспособлениями, включающими захватные органы в виде штопоров, и прикрепленное к несущей раме основание, отличающееся тем, что снабжено механизмом вращательного и возвратно-поступательного движения штопоров, выполненным в виде винтовой передачи, монтажной плитой, связанной со штоком силового пневмоцилиндра дифференциального действия, на которой смонтированы подшипники и направляющие штанги, расположенные во втулках захвата, при этом один конец винтовой передачи соединен с подшипниками, а другой - со штопором.
| Захватное устройство для киповых грузов | 1983 |
|
SU1106780A1 |
| Навесное захватное приспособление к погрузчику | 1976 |
|
SU678026A1 |
| Захватное устройство для киповых грузов | 1974 |
|
SU511275A1 |
| 0 |
|
SU194233A1 | |
| DE 10054578 А, 08.05.2002 | |||
| Привод управления супортом токарного автомата | 1941 |
|
SU62105A1 |

