Изобретение относится к области гидролокации, в частности, для оперативного контроля состояния дна в процессе дноуглубительных или добычных работ судна земснаряда. Изобретение позволяет работать в условиях водно-грунтовой взвеси, которая неизбежно сопровождает любые работы на дне, и для пользователя позволяет получать наглядную картину глубин дна в районе работы земснаряда с заданной для земляных работ на дне точностью (единицы сантиметров).
Земснаряды - суда технического флота, применяемые для подводной разработки и выемки грунта при дноуглубительных работах и в гидротехническом строительстве. Особенностью любых подводных разработок и выемок грунта является образование водно-грунтовой взвеси, которая мешает работе гидролокаторов, и во время работы земснарядов для определения текущей формы дна используется модельный способ, то есть считается, что там, где прошел рабочий инструмент земснаряда, нет грунта. Но при этом не учитываются осыпи краев ям и выпадающие из рабочего инструмента камни. Возможность провести промеры глубин появляется только через несколько дней после окончания работы земснаряда, и в случае оставленных “недокопов” их приходится исправлять, неся при этом затраты на перестановку и работу земснаряда либо штрафы.
Для повышения эффективности работы земснаряда необходимо в реальном времени во время работы земснаряда контролировать текущее состояние донной поверхности по глубине и видеть на дне оставленные камни, кочки и посторонние предметы. Оптические методы в мутной воде не позволяют видеть на расстояния более полуметра, электромагнитные дальномеры ограничены единицами метров, поэтому единственное физическое поле, подходящее для измерений - это гидроакустическое поле.
Известны 2D обзорные гидролокаторы, например, Teledyne Blueview серии M900, они позволяют формировать плоское изображение, отображающее яркость отражения от объектов, расположенных в воде. Такие гидролокаторы являются аналогом сканирующего гидролокатора бокового обзора и не позволяют измерять глубину, так как измеряют только расстояние до отражающего объекта.
Известные системы формирования 3D изображений подводных объектов являются программным расширением многолучевых эхолотов, и они не могут работать в мутной воде - у них отсутствует критерий отличия границы вода-муть и муть-дно.
Известен патент RU2510045C2 (опубл. 20.03.2014, МПК G01S15/00) “Способ определения глубин акватории фазовым гидролокатором бокового обзора и фазовый гидролокатор бокового обзора для его осуществления”. В данном патенте предлагается излучение гидроакустического сигнала в сторону дна и прием отраженных сигналов в двух точках, расположенных по вертикали на заданном расстоянии, измерение времени задержки прихода синфазных сигналов, в результате чего для каждого отражающего подводного объекта определяется дистанция до него и направление, то есть относительные координаты. Для построения карты донной поверхности необходимо закрепить данный фазовый гидролокатор бокового обзора на судне и обеспечить движение судна вдоль измеряемой акватории. Недостатком данного решения является отсутствие способа определения карты глубин акватории с неподвижного судна и наличие ошибок определения глубин при работе в условиях водно-грунтовой взвеси.
Наиболее близким прототипом является «Способ определения глубин в реальном масштабе времени при обследовании рельефа дна гидролокатором бокового обзора с последующим его восстановлением» (RU2521127С2, опубл. 27.06.2014 г., МПК G01S 15/89), включающий измерения времени задержки синфазных сигналов донной реверберации, принимаемых двумя антеннами, разнесенными по вертикали на несколько длин волн упругих колебаний, и разрешение неоднозначности измерений, вычисление глубин. Далее при каждом совпадении фаз интерферирующих сигналов регистрируют мгновенное значение частоты сигнала в нижнем канале, измеряют время запаздывания появления сигнала в верхнем канале с тем же значением мгновенной частоты, измеренное значение времени запаздывания умножают на значение рабочей частоты интерферометра, определяют порядковую нумерацию ряда измерений задержки прихода синфазных сигналов в период каждого зондирования в реальном масштабе времени. Глубины вычисляют, соответствующие каждой интерференционной полосе, а при последующем восстановлении рельефа дна по измеренным глубинам выполняют оценку репрезентативности (значимости) критических точек рельефа путем представления гладкой непрерывной поверхности рельефа дна деревом Кронрода-Риба.
Преимуществом прототипа перед аналогами является возможность формирования гладкой непрерывной поверхности рельефа дна.
Недостатком прототипа является отсутствие фильтрации скачков плотности взвеси и, как следствие, наличие ошибок определения глубин при работе в условиях водно-грунтовой взвеси, создаваемой работающим земснарядом.
Техническим результатом изобретения является повышение эффективности оперативного контроля текущего состояния дна в рабочей зоне земснаряда при наличии водно-грунтовой смеси как во время работы земснаряда, так и после его остановки. Достигается это установкой антенны интерференционного гидролокатора бокового обзора на поворотную платформу ниже корпуса земснаряда с целью получения набора профилей сечения дна под земснарядом с различным азимутом, после чего пространственной фильтрации полученных эхосигналов для разделения отражений от дна и от неоднородностей в водной среде (водно-грунтовой взвеси) и построения гладкой поверхности дна.
Известно, что амплитуда отраженного от неоднородностей среды сигнала имеет вид [1]:
 (1)
(1)
где
p(t) - давление на приемнике,
p0(t) - давление на излучателе,
r - дистанция до объекта локации,
mv - удельный коэффициент обратного отражения, зависящий от отражающего объема, размера частиц и частоты излучения,
RA - характеристика направленности приемо-излучателя,
c - скорость звука в воде,
τ - задержка по времени относительно посылки,
RЭ - эквивалентный радиус отражающего объекта,
β - коэффициент поглощения среды.
Для того чтобы принять отраженный от дна сигнал необходимо:
- чтобы отражающий объект был много больше половины длины волны зондирующего сигнала (RЭ >> c/f);
- чтобы проводящая сигнал среда была как можно менее поглощающей (параметр β как можно меньше).
При этом частота зондирующего сигнала снизу ограничена точностью локации (способностью обнаружить небольшие объекты на дне), а сверху - поглощающей способностью водно-грунтовой смеси. При размере частиц смеси менее 1 мм частота зондирующего сигнала должна быть 100...300 кГц при локации 20...75 метров от земснаряда. При этом стоит учитывать, что дальность локации также ограничена глубиной водоема и не может быть больше 5..7 глубин. Чем выше частота тем выше точность локации, но меньше дальность работы, чем ниже частота - наоборот, больше дальность работы гидролокатора, но ниже точность.
Отраженный от неровностей дна сигнал попадает на приемные антенны так, чтобы приходящий с разных направлений сигнал приходил с разными задержками сигнала по времени. Для этого приемные антенны располагают на некотором расстоянии по вертикали, как показано на Фиг. 2.
Таким образом, принимаем два сигнала [2]:
 ,
,

То есть сигналы отличаются только задержкой прихода сигналов, зависящей от расстояния между приемными элементами, направления прихода и скорости звука в воде.
При использовании тонального зондирующего сигнала (когда посылается ограниченный по времени синусоидальный сигнал) задержка прихода сигналов может быть выражена через разницу фаз двух принятых сигналов:
 .
.
Измерение разности фаз двух сигналов - типовая операция при цифровой обработке и аналитическом представлении сигналов (например, после преобразования Гильберта):
 .
.
Отсюда вытекает требование к расположению приемных антенн - они должны располагаться на расстоянии не более половины длины волны принимаемого сигнала. При нарушении данного требования появляется неоднозначность пеленгования - появляется несколько направлений, разница фаз принимаемых сигналов с которых имеет одинаковое значение.
Посылаемый сигнал распространяется от излучающей антенны со скоростью звука в воде, и фронт волны движется через водно-грунтовую взвесь в сторону дна и вдоль него. Любая неоднородность как в водной среде, так и на дне формирует отраженный сигнал, распространяющийся во все стороны, в том числе в сторону приемных антенн. Таким образом, на приемные антенны приходит сумма большого числа отраженных от расположенных в разных точках пространства сигналов. Амплитуды сигналов, как было сказано, зависят от размера неоднородности (чем больше неоднородность тем сильнее сигнал), контраста (чем сильнее отличается плотность и скорость звука между материалами сгустка или граница воды-дна тем сильнее отражение). Поэтому можно считать, что каждое дискретное значение принятого сигнала, воспринимаемое как критическая точка, определяет дистанцию по задержке после посылки и направление прихода по разнице фаз между приемными элементами антенны, по которым можно вычислить глубину места и смещение от антенны.
Так как величины дистанции и направления прихода критических точек не позволяют судить, какие из них более репрезентативные, относящиеся к поверхности дна, а какие нет, за исключением только точек с наибольшим значением минимума и максимума амплитуды. Для определения значимости критической точки поверхности в качестве подходящей основы воспользуемся широко используемым в зарубежной картографии понятием "топографической значимости" (topographic prominence) [5].
Топографическая значимость - это перепад высот между вершиной и самой высокой седловой точкой, которая отделяет эту вершину от любой более высокой вершины. Но прямое использование этого понятия в наших целях невозможно, так как оно рассматривает только точки локальных максимумов и седловые точки, но не включает в рассмотрение точки локальных минимумов рельефа, и, оно не опирается на математические понятия, что не гарантирует отсутствие логических и алгоритмических ошибок. Последнее проявляется, например, в том, что определение топографической значимости не позволяет сделать однозначный выбор седловой точки, относительно которой отсчитывается высота вершины.
Предложенные в прототипе методы (поверхность Морса, дерево Кронрода-Риба) в условиях наличия водно-грунтовой взвеси оказываются неприменимы, так как не позволяют отсеивать “репрезентативные” критические точки от сгустков водно-грунтовой смеси, имеющие достаточно большую амплитуду отраженного сигнала, содержащие седловые точки, но не отображающие текущее состояние дна. Поэтому необходимо использовать дополнительную пространственную фильтрацию, отсеивающую критические точки, не относящиеся к поверхности дна и объектов на дне.
Такой фильтрацией, обеспечивающей физически обоснованное разделение на точки, относящиеся к поверхности дна, и шумы является Калмановская фильтрация [3]. Но “обыкновенный” Калмановский фильтр (CKF) работает хорошо лишь в исключительных - так называемых хорошо обусловленных - задачах и расходится в большинстве практических задач. Необходим устойчивый и численно эффективный алгоритм пространственной фильтрации.
Явление расходимости теоретического алгоритма CKF породило поиски альтернатив, алгебраически эквивалентных CKF, но в вычислениях значительно более устойчивых.
Хорошо известно, что основная вычислительная нагрузка в фильтре Калмана приходится на итерации уравнения Риккати [4]. Чтобы сократить объем вычислений, Мартин Морф и Томас Кайлат [4] предложили совместить в одной ортогонализированной схеме вычислений этапы экстраполяции и обработки измерений фильтра, что сделало алгоритм устойчивым. В настоящее время появилась возможность использования параллельных вычислений, в результате чего данный алгоритм был переписан для представления в блочной форме, удобной для параллельных вычислений.
В предлагаемом способе антенна поворачивается на заданный угол после каждого цикла зондирования, принимаемый сигнал на каждом цикле содержит последовательность критических точек, имеющих координату и глубину. Программа обрабатывает полученный набор критических точек описанным способом. Результаты вычислений каждого блока стыкуются в виде граничных условий, после чего вычисления повторяют. Количество итераций в таком подходе оказывается существенно меньше, чем при классическом способе вычислений, а результат алгебраически совпадает.
Таким образом, оказывается возможным построить гладкую модель поверхности дна в районе работы земснаряда с заданной точностью даже в условиях водно-грунтовой взвеси с неподвижного или малоподвижного земснаряда. Это обеспечивает проведение оперативного контроля состояния дна в процессе дноуглубительных или добычных работ.
Реализация предлагаемого способа представлена на чертежах:
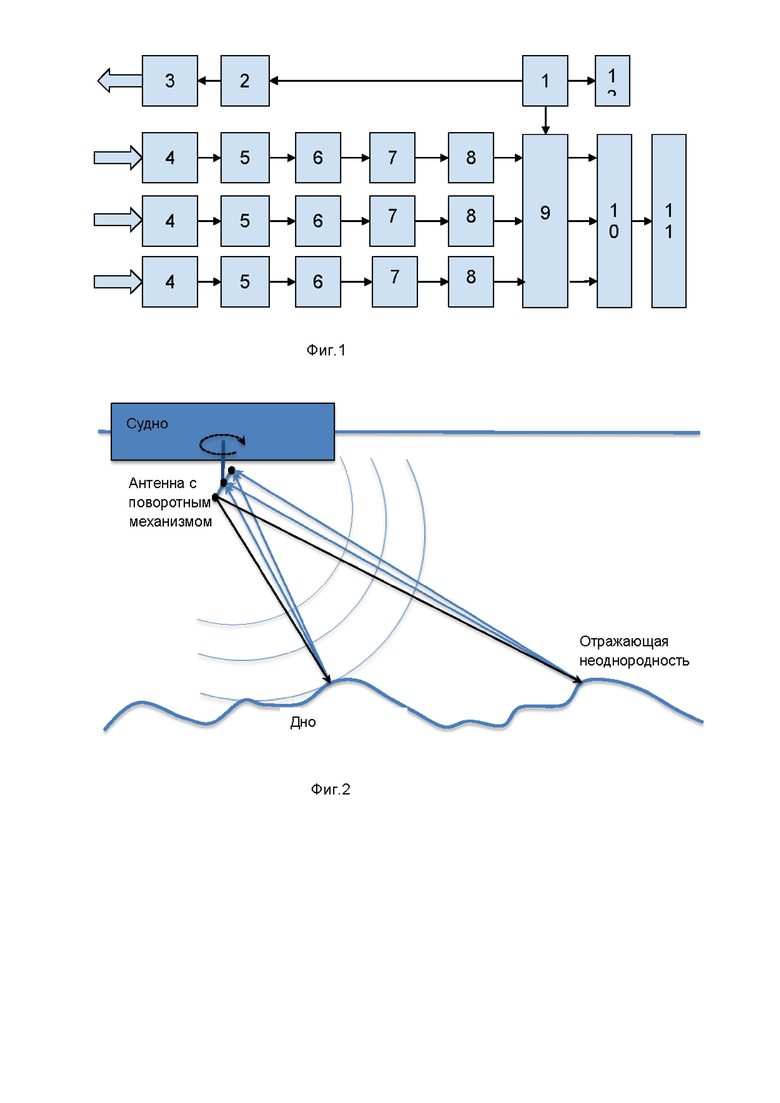
Фиг. 1 - структурная схема последовательности операций при реализации способа;
Фиг. 2 - пример расположения антенн относительно земснаряда.
Способ визуализации текущего состояния рельефа дна при работе земснаряда осуществляется с использованием (фиг.1) генератора зондирующих импульсов 1, усилителя мощности 2, пьезоакустического излучателя 3, который может быть совмещен с приемником, набора пьезоакустических приемников 4, усилителей 5, аналогово-цифровых преобразователей 6, преобразователя Гильберта 7, блока выделения амплитуды и фазы сигнала 8, блока определения дистанции и направления прихода сигнала 9, блока пространственной фильтрации 10 и блока отображения 11. Блок 12 обеспечивает управление поворотом антенны.
Способ работает следующим образом.
Генератор зондирующих импульсов 1 формирует сигнал посылки, который проходит через усилитель мощности 2 и узконаправленный сигнал антенной 3 излучают в воду под земснарядом. Отраженные от неоднородностей на дне и в толще воды сигналы поступают на приемные элементы антенны 4, которых может быть 2 и более для однозначности пеленгования. Сигналы с приемных элементов поступают на усилители 5, АЦП 6, в цифровом виде преобразуются в аналитический вид с помощью блоков преобразователей Гильберта 7, в аналитическом сигнале выделяется амплитуда и фаза каждого сигнала 8. По разнице фаз между сигналами определяется направление прихода, а по времени после посылки определяется дистанция до отражающей неоднородности в блоке 9. Полученное облако точек, каждая точка со своей дистанцией и направлением прихода, поступают на блок пространственного фильтра 10, где отбрасываются ложные точки (шумы) и формируется модель поверхности дна, после чего полученный результат поступает в блок 11 для отображения и визуализации рельефа дна. После окончания обработки одного цикла зондирования поступает команда на блок 12 поворота антенны для следующего цикла зондирования. Количество циклов определяется размером сектора углов работы системы и требуемой точностью построения карты дна.
Использование данного изобретения повышает эффективность дноуглубительных и добычных работ на земснарядах благодаря постоянному контролю качества производимых работ, что позволяет обойтись без простоев в процессе работы земснаряда из-за ожидания оседания взвеси, последующих промеров глубин и исправления недокопов, а также снижения избыточного углубления дна (багерского запаса). Применение недорогой и надежной антенны интерферометрического гидролокатора бокового обзора на поворотной платформе позволяет получить более точную и подробную карту поверхности дна, чем во много раз более дорогие многолучевые эхолоты.
Источники информации:
1. Свердлин Г.М. Гидроакустические преобразователи и антенны. Учебник для техникумов (Ленинград: Издательство «Судостроение», 1980).
2. Малышкин Г.С. Оптимальные и адаптивные методы обработки гидроакустических сигналов. Том 1. Оптимальные методы - СПб.: Электроприбор, 2009. - 400 с.
3. Kalman R.E. A New Approach to Linear Filtering and Prediction Problems // ASME Journal of Basic Engineering, 1960, Vol. 82, pp. 34-45.
4. Lange A.A. Optimal Kalman Filtering for Ultra-Reliable Tracking, ESA CD-ROM WPP-237 // Atmospheric Remote Sensing Using Satellite Navigation Systems, Proceedings, Special Symposium of the URSI Joint Working Group FG, 13-15 October 2003, Matera, Italy.
5. Christopherson G.L. Using ARC/GRID to Calculate Topographic Prominence in an Archaeological Landscape. // Arc/INFO User Conference, 2003. - 15 pp. Podobnikar T. Method for Determination of the Mountain Peaks // 12th AGILE International Conference on Geographic Information Science, Leibniz Universitat Hannover, Germany,2009, p.1-8.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИИ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ | 2011 |
|
RU2466426C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429507C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА И ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484499C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ПУЛЬПЫ | 2018 |
|
RU2694448C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ТОЛЩЕ ДОННОГО ГРУНТА | 2009 |
|
RU2410721C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ ПРИ ОБСЛЕДОВАНИИ РЕЛЬЕФА ДНА ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА | 2012 |
|
RU2521127C2 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| Способ обнаружения звукорассеивающих слоев в морях и океанах | 2023 |
|
RU2813634C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2272303C1 |
Изобретение относится к области гидролокации, в частности, для контроля состояния дна в процессе работ судна земснаряда. Изобретение позволяет работать в условиях водно-грунтовой взвеси, которая неизбежно сопровождает работы на дне. Техническим результатом является - повышение эффективности оперативного контроля текущего состояния дна в рабочей зоне земснаряда при наличии водно-грунтовой смеси как во время работы земснаряда, так и после его остановки. Для достижения результата антенны интерференционного гидролокатора бокового обзора устанавливают на поворотную платформу ниже корпуса земснаряда, формируют и излучают узконаправленный по направлению поворота и широкий в вертикальной плоскости сигнал посылки в сторону дна, прием в нескольких фазовых точках отраженных от дна и взвеси в водной среде сигналов, которые затем усиливают, оцифровывают и, используя преобразователи Гильберта, формируют аналитический вид сигнала, в котором выделяют амплитуду и фазу каждого отраженного сигнала, определяют направление его прихода и по времени прихода сигнала после посылки дистанцию до отражающей неоднородности, множество сигналов, полученное таким образом, формирует совокупность точек, после этого поступает команда на блок поворота антенн для проведения следующего цикла зондирования, совокупности точек по разным углам поворота антенн поступают на вход пространственного фильтра для исключения точек, не относящихся к поверхности дна, и последующего формирования модели поверхности дна, которую визуализируют в блоке отображения в данный момент времени. 1 з.п. ф-лы, 2 ил.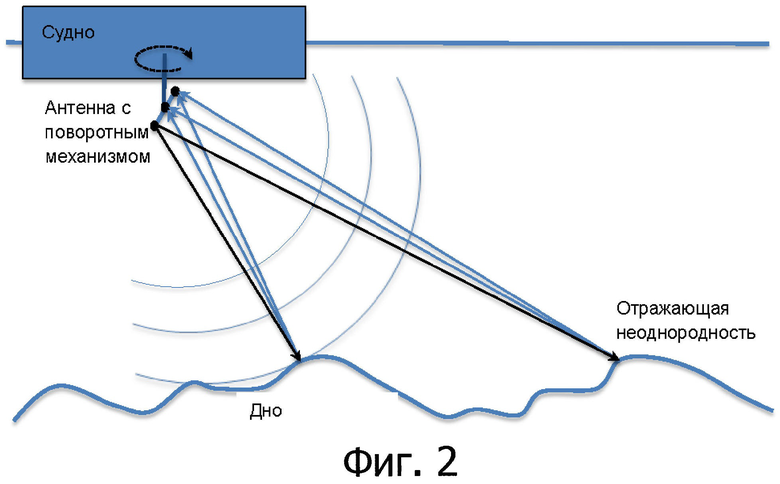
1. Способ визуализации текущего состояния рельефа дна при работе земснаряда, включающий:
размещение излучающей и приемных антенн с возможностью их поворота под днищем земснаряда,
формирование и излучение узконаправленного по направлению поворота и с широкой характеристикой направленности в вертикальной плоскости сигнала посылки в сторону дна,
прием отраженных от дна и взвеси в водной среде сигналов приемными антеннами, которые затем усиливают, оцифровывают и, используя преобразователи Гильберта, формируют аналитический вид сигнала, причем каждое дискретное значение принятого сигнала воспринимается как критическая точка,
выделение, в аналитическом виде сигнала, амплитуды и фазы каждой критической точки отраженного сигнала,
определение направления прихода каждой критической точки отраженного сигнала по разнице фаз между приемными элементами антенны и дистанции до отражающей неоднородности по времени прихода после посылки,
формирование совокупности пространственных точек из всех полученных критических точек итеративно производя пространственную фильтрацию критических точек на относящиеся к поверхности дна и шумы, используя фильтр Калмана на основе выражения Мартина Морфа и Томаса Кайлата,
поворот излучающей и приемных антенн для проведения следующего цикла зондирования,
формирование модели поверхности дна, в которой полученные при различных положениях поворотной антенны наборы пространственных точек стыкуются в виде граничных условий, и
визуализацию сформированной модели поверхности в блоке отображения в данный момент времени.
2. Способ по п.1, в котором частоту узконаправленного луча сигнала посылки выбирают с учетом размеров частиц взвеси в водной среде и точности определения глубин при работе земснаряда.
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Способ получения 3-(изохинолил-1)индола | 1982 |
|
SU1089092A1 |

