Настоящее изобретение, в общем, относится к технологиям, связанным с системами позиционирования, такими, как Глобальная система позиционирования (GPS) или европейская система Галилея, и, более конкретно, к способам разрешения целочисленных неопределенностей в измерениях фазы несущей в системах определения положения.
УРОВЕНЬ ТЕХНИКИ
В глобальной системе позиционирования, такой как глобальная система позиционирования (GPS), используется созвездие спутников для определения положения или управления объектами на Земле. В настоящее время это созвездие спутников выполняет широковещательную передачу сигналов на двух несущих частотах, частоте L1 (154*10,23 МГц) или 1572,45 МГц и частоте L2 (120*10,23 МГц) или 1227,6 МГц, или на длине волны L1, равной 0,1903 м, или на длине волны L2, равной 0,2442 м, соответственно. Для каждой несущей частоты приемник GPS обычно выполняет два измерения с объектом, положение которого определяется. Два типа измерений GPS представляют собой измерение псевдодальности, и измерение интегрированной фазы несущей. Измерение псевдодальности (или кодовое измерение) представляет собой основу GPS, которое могут выполнять все типы приемников GPS. Для него используют C/A или P коды, которыми модулируют сигналы несущих. Измерение фазы несущей получают путем интегрирования реконструированной несущей сигнала, по мере того, как он поступает в приемник. Ввиду неизвестного количества полных циклов фазы на пути между спутником и приемником, когда приемник начинает отслеживать фазу несущей сигнала, существует неоднозначность полных циклов в измеренной фазе несущей. Такая неопределенность полных циклов должна быть разрешена для получения высокой точности при измерении фазы несущей.
При выполнении доступных измерений GPS, расстояние или дальность между приемником GPS и каждым из множества спутников вычисляется путем умножения времени прохождения сигнала на скорость света. Эти расстояния обычно называют псевдодальностями (ложными дальностями), поскольку измерения GPS могут включать в себя ошибки, ввиду различных факторов, вносящих ошибки, таких как ошибка синхронизации спутника, ошибка эфемерид, ионосферная и тропосферная рефракция, шумы отслеживания приемника и ошибка из-за многолучевого распространения, и т.д. Для устранения или снижения этих ошибок, при использовании GPS обычно применяют дифференциальный режим работы. В дифференциальном режиме работы GPS (DGPS) в типовом случае используется базовый опорный приемник GPS, пользовательский приемник GPS и механизм передачи данных между пользователем и опорными приемниками. Опорный приемник расположен в известном местоположении, и это известное положение используется для генерирования поправок, связанных с некоторыми или всеми указанными выше факторами, влияющими на ошибку. Генерируемые поправки или необработанные данные, измеренные в опорной станции, передаются в приемник пользователя, который затем использует поправку или необработанные данные для соответствующей коррекции своего вычисленного положения. Дифференциальные операции с использованием измерений фазы несущей часто называются операциями позиционирования/навигации с кинематикой в режиме реального времени (RTK).
Генерируемые поправки или необработанные данные, измеренные в опорном приемнике, однако, используются в пользовательском приемнике GPS только в том случае, когда существует пространственная и временная корреляция ошибок между опорным приемником и пользовательским приемником. В то время как ошибка времени спутника GPS, которая появляется как смещение при измерении псевдодальности или фазы несущей, в высокой степени коррелирована между опорным приемником и пользовательским приемником, большая часть других факторов, влияющих на ошибку, либо не коррелированы, или корреляция ухудшается в приложениях широкого охвата, например, когда расстояние между опорным приемником и пользовательским приемником становится слишком большим. Кроме того, в случае, когда расстояние между пользовательским приемником и опорным приемником становится большим, например, больше, чем приблизительно 10-20 километров, эти две несущих частоты в существующей системе GPS являются неадекватными для разрешения неоднозначностей полного цикла фазы несущей.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение включает в себя способ генерирования измерения фазы несущей с разрешенной неоднозначностью, коррекцией рефракции и с минимальными шумами. В одном варианте выполнения, для формирования измерения фазы несущей с разрешенной неоднозначностью, коррекцией рефракции и с минимальными шумами, формируют первое составное измерение с использованием измерений фазы несущей GPS на частотах L1, L2 и L5. Первое составное измерение представляет собой линейную комбинацию измерений фазы несущей GPS на трех несущих частотах GPS. При этом разрешается неоднозначность и обеспечивается коррекция рефракции, но может возникать относительно значительный шум из-за многолучевого распространения. Для уменьшения этого шума в первом составном измерении формируется второе составное измерение с использованием измерений фазы несущей GPS, по меньшей мере, на двух из трех несущих частотах GPS. Второе составное измерение формируется так, чтобы оно имело малый шум из-за многолучевого распространения так, чтобы его можно было использовать для сглаживания первого составного измерения.
В одном варианте выполнения для сглаживания первого составного измерения вторым составным измерением, вычисляется смещение между первым составным измерением и вторым составным измерением в каждом из множества начальных отсчетов времени измерений, причем это смещение сглаживается в расширяющемся среднем по множеству начальных отсчетов времени измерения. Сглаженное смещение добавляется ко второму составному измерению для получения измерения фазы несущей GPS с разрешенной неоднозначностью, коррекцией рефракции и минимизированными шумами.
Возможность разрешения неоднозначностей составных измерений с коррекцией рефракции в значительной степени устраняет базовые ограничения разделения при использовании дифференциального режима GPS для измерения фазы несущей, что позволяет реально осуществить возможность глобальной RTK.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг.1 показана блок-схема компьютерной системы, которую можно использовать для выполнения способа генерирования измерения фазы несущей с разрешенной неоднозначностью, коррекцией рефракции и с минимизированными шумами.
На фиг.2 показана блок-схема последовательности операций, иллюстрирующая способ генерирования измерения фазы несущей с разрешенной неоднозначностью, коррекцией рефракции и с минимизированными шумами.
На фиг.3 показана блок-схема последовательности операций, иллюстрирующая процесс сглаживания, используемый в способе для генерирования измерения фазы несущей с разрешенной неоднозначностью, коррекцией рефракции и с минимизированными шумами.
ПОДРОБНОЕ ОПИСАНИЕ
На фиг.1 представлена компьютерная система 100, которую можно использовать для выполнения способа генерирования составных измерений фазы несущей с разрешенной неоднозначностью, коррекцией рефракции и с минимизированными шумами, в соответствии с одним вариантом выполнения настоящего изобретения. Компьютерная система 100 соединена с приемником 122 GPS пользователя, который передает в компьютерную систему 100 коды GPS и результаты измерения фазы несущей, полученные на основе сигналов от множества спутников 110-1, 110-2, ..., 110-n, где n представляет собой количество спутников в поле зрения пользовательского приемника 122 GPS. Пользовательский приемник 100 GPS может быть связан с опорным приемником 140 GPS, также выполняющим измерения на основе сигналов от множества спутников, которые используются для генерирования поправок измерений GPS, выполненных пользовательским приемником GPS. Множество спутников или любой один или более из них, иногда упоминаются ниже, как спутник (спутники) 110. В некоторых вариантах выполнения пользовательский приемник 122 GPS и компьютерная система 100 интегрированы в одно устройство, расположенное в одном корпусе, таком как переносное, портативное или даже носимое устройство отслеживания положения, или устройство, установленное в транспортном средстве, или какая-либо другая мобильная система позиционирования и/или навигации. В других вариантах выполнения пользовательский приемник 122 GPS и компьютерная система 100 не интегрированы в виде одного устройства.
Как показано на фиг.1, компьютерная система 100 включает в себя центральное процессорное устройство (ЦПУ) 126, память 128, входной порт 134 и выходной порт 136, и (факультативно) интерфейс пользователя 138, соединенные друг с другом с помощью одной или нескольких шин 129 передачи данных. Память 128 может включать в себя высокоскоростное оперативное запоминающее устройство и энергонезависимую массовую память, такую как одно или более запоминающих устройств на магнитном диске. В памяти 128, предпочтительно, записана операционная система 131, база данных 133 и прикладные процедуры 135 GPS. Прикладные процедуры GPS могут включать в себя процедуры 137, предназначенные для выполнения способа генерирования составного измерения фазы несущей с разрешенной неоднозначностью, коррекцией рефракции и с минимизированными шумами, в соответствии с одним вариантом выполнения настоящего изобретения, как более подробно описано ниже. Операционная система 131 и прикладные программы, такие как процедуры 135 и 137, записанные в памяти 128, предназначены для выполнения ЦПУ 126 компьютерной системы 124. В памяти 128, предпочтительно, также записаны структуры данных, используемые во время выполнения прикладных процедур 135 и 137 GPS, включая измерение 139 псевдодальности и/или фазы несущей GPS, а также другие структуры данных, описанные в этом документе.
Входной порт 134 предназначен для приема данных из приемника 122 GPS, а выходной порт 136 используется для вывода данных и/или результатов вычисления. Данные и результаты расчетов могут быть также представлены на устройстве отображения интерфейса 138 пользователя.
Для разрешения неоднозначностей полного цикла фазы несущей были разработаны два основных метода. Первый метод часто называется методом, "свободным от геометрии", или методом "измерение-пространство" и использует сглаженные кодовые измерения для определения неоднозначности полного цикла при измерениях фазы несущей. Второй метод часто называется методом, "зависимым от геометрии", или методом "положение-пространство" и использует процесс поиска для определения, какая комбинация неоднозначностей полного цикла по отношению к множеству спутников, находящихся в поле зрения приемника GPS, позволяет получить "наилучшее" решение в соответствии с некоторыми критериями, такими как минимальная сумма квадратов разностей измерений.
Существует несколько преимуществ использования подхода, свободного от геометрии, для разрешения неоднозначности фазы несущей. Первое преимущество подхода, свободного от геометрии, состоит в том, что на него в меньшей степени влияют ошибки при измерениях GPS, вызываемые эффектами тропосферной рефракции, поскольку тропосфера в одинаковой степени влияет на кодовые измерения и измерения фазы несущей. Второе преимущество подхода, свободного от геометрии, состоит в том, что разрешение неоднозначности выполняется на основе от спутника к спутнику, по сравнению с подходом, зависимым от геометрии, для которого требуется, чтобы, по меньшей мере, пять спутников находились в поле зрения приемника GPS, для обеспечения правильности решения. Третье преимущество подхода, свободного от геометрии, состоит в том, что движение приемника GPS пользователя не влияет на различие кодовых измерений и измерений фазы несущей, в то время как для подхода, зависимого от геометрии, может потребоваться прогнозировать положение приемника GPS пользователя вперед по времени, когда пользователь находится в движении. Кроме того, поскольку в подходе, свободном от геометрии, используется большая степень свободы, чем в подходе, зависимом от геометрии, проще проверить, что правильное разрешение неоднозначности полного цикла было выполнено в случае подхода, свободного от геометрии. Эти преимущества делают подход, свободный от геометрии, более предпочтительным для применений RTK.
С двумя существующими несущими частотами L1 и L2, метод, свободный от геометрии, используют для разрешения неоднозначности полного цикла каскадным образом, при котором неоднозначности полного цикла вначале разрешаются для комбинаций измерения на широкой полосе, имеющей наибольшую длину волны. Чаще всего используемая комбинация широкой полосы представляет собой простую разность измерений фазы несущей на существующих двух частотах L1 и L2, которая ниже упоминается как разность измерений (L1-L2). Разность измерений (L1-L2) имеет длину волны 86,2 см и хорошо подходит для разрешения неоднозначности полного цикла. Неоднозначность полного цикла при измерениях разности (L1-L2) может быть разрешена с использованием частотно-взвешенного среднего значения кодовых измерений на двух частотах, что соответствует ионосферному искажению разности измерений фазы несущей. Разрешенные неоднозначности полного цикла на широкой полосе затем используются для последовательного перехода к меньшим длинам волн (на узкой полосе). Такой подход, однако, работает только, когда расстояние между опорным приемником и приемником пользователя (базовое разнесение) не превышает определенный предел, такой как 10-20 километров.
Источник проблемы состоит в обусловленном ионосферой эффекте отклонения для двух несущих частот, когда базовое разнесение становится большим. На разность измерения (L1-L2) отрицательно влияет ионосферная рефракция. Величина влияния ионосферной рефракции на разность измерений приблизительно равна среднему значению влияния на измерения двух отдельных L1 и L2, но имеет противоположный знак. Хотя неоднозначность полного цикла при разности измерений (L1-L2) может быть разрешена на больших расстояниях, для устранения влияния ионосферной рефракции на разность измерений также должна быть разрешена неоднозначность полного цикла при некоторых других комбинациях измерений с разной зависимостью от влияния ионосферы. Комбинация измерений или составное измерение представляет собой комбинацию измерений фазы несущей на разных несущих частотах.
При использовании только двух несущих частот очень трудно разрешить неоднозначности полного цикла по любым другим комбинациям измерений фазы несущей, когда базовое разнесение велико. Без третьей частоты наилучшая комбинация, которая имеет очень незначительное искажение, вызванное ионосферной рефракцией, представляет собой составное измерение, сформированное с использованием разности между девятикратным измерением фазы несущей L1 и семикратным измерением фазы несущей L2, что обозначается как составное измерение (9L1-7L2). Но такое составное измерение имеет две очень неблагоприятные характеристики. Во-первых, эффективная длина волны составного измерения составляет только 5,35 см. Знание величины неоднозначности для комбинации измерения (L1-L2) (независимо от того, является ли она четной и нечетной) можно использовать для увеличения эффективной длины волны в диапазоне от 5,37 до 10,7 см. Но при этом все еще невозможно разрешить неоднозначность с поправкой на рефракцию при больших базовых разнесениях, ввиду неблагоприятного умножения шумов из-за многолучевого распространения в процессе коррекции рефракции.
Как часть модернизации GPS, новый сигнал с третьей частотой станет доступным для гражданских пользователей. Этот новый сигнал по историческим причинам иногда обозначают как сигнал L5, и он имеет частоту (115*10,23 мГц) или 1176,45 мГц, или длину волны 0,2548 м. Предложенное добавление третьей частоты к широковещательным сигналам GPS обеспечивает дополнительную степень свободы при проектировании составных измерений с переменными длинами волн, изменяющейся чувствительностью к ионосфере, и различным эффектам усиления шумов, и, таким образом, может быть полезным при получении измерения фазы несущей с разрешенной неоднозначностью и коррекцией рефракции, что является необходимым для использования высокоточной GPS.
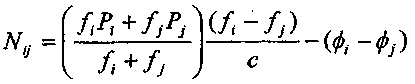
На фиг.2 представлен способ 200, предназначенный для формирования составного измерения фазы несущей с разрешенной неоднозначностью, коррекцией рефракции и с минимизированными шумами, в соответствии с одним вариантом выполнения настоящего изобретения. Как показано на фиг.2, способ 200 включает в себя этап 210, на котором разрешаются неоднозначности, по меньшей мере, при двух измерениях по широкой полосе, каждое из которых формируется с использованием разности между измерениями фазы несущей, выполняемыми на двух из трех частот. Как указано выше, частотно-взвешенное среднее значение L1 и L2 по кодовым измерениям соответствует ионосферной рефракции разности измерений (L1-L2) фазы несущей, и поэтому его можно использовать для разрешения неоднозначности разности измерений фазы несущей (L1-L2), независимой от ионосферных искажений при измерениях. Аналогичным образом также могут быть определены неоднозначности разности измерений (L1-L5) и (L2-L5) фазы несущей. Общее соотношение для разрешения таких неоднозначностей широкой полосы с использованием частотно-взвешенного среднего значения соответствующих кодовых измерений представляет собой
 (1)
(1)
где i, j=1, 2 или 5, представляют две различные частоты Li и Lj несущих, соответственно, f i и f j представляют амплитуды частот Li и Lj, соответственно, Pi и Pj представляют собой кодовое измерение на частотах Li и Lj, соответственно, φi и φj представляют измерение фазы несущей на частотах Li и Lj, соответственно, c представляет собой скорость света, и Nij представляет неоднозначность полного цикла фазы несущей для разности измерения (Li-Lj) фазы несущей, округленную до ближайшего целочисленного значения. При этом предполагается, что как кодовое измерение, так и измерение фазы несущей в уравнении (1), были скорректированы с использованием измерений, выполненных опорным приемником.
Поэтому неоднозначности широкой полосы для разности измерений (L1-L2), (L1-L5) и (L2-L5) фазы несущей могут быть разрешены с использованием уравнения (1). Действительно, ввиду взаимозависимости между частотами, если будут определены неоднозначности для любых двух из этих разностей измерений, может быть непосредственно определена неоднозначность для третьей разности измерений. Однако при этом все еще возникает проблема, когда из этих разностей измерения пытаются устранить ионосферные искажения. Поскольку частоты L2 и L5 очень близки друг к другу, получение разности измерений фазы несущей для этих двух частот приводит к значительным шумам из-за многолучевого распространения при разности измерений. После ионосферной коррекции шум из-за многолучевого распространения дополнительно усиливается. Таким образом, непрактично использовать разность измерений (L2-L5) для непосредственно разрешения измерения L1, L2 или L5 фазы несущей на узкой полосе. Без использования разности измерения (L2-L5), разности измерения (L1-L2) и (L1-L5) имеет настолько близкие значения, что требуется большой множитель для отображения разности на коррекцию измерения L1, L2 или L3. Это снова усиливает шум из-за многолучевого распространения до недопустимого уровня.
Таким образом, способ 200 дополнительно включает в себя этап 220, на котором составное измерение, имеющее незначительную ошибку рефракции, формируется с использованием измерений фазы несущих, выполняемых на всех трех частотах. В одном варианте выполнения настоящего изобретения такое составное измерение является линейной комбинацией измерений фазы несущих на трех частотах, и более предпочтительно, сверхкомбинацией, по меньшей мере, двух измерений на широкой полосе с разрешенной неоднозначностью. Отсутствие ошибки рефракции в составном измерении представляет собой результат ошибок рефракции при измерениях фазы несущей на трех частотах, которые взаимно компенсируют друг друга при формировании составного измерения, или результат ошибок рефракции при измерениях на широкой полосе, которые взаимно компенсируют друг друга при формировании сверхкомбинации. Например, коррекция рефракции может быть получена путем вычитания из измерения на широкой полосе (L1-L2) кратного значения измерения (L2-L5), таким образом, чтобы ошибка ионосферной рефракции для кратного значения измерения на широкой полосе (L2-L5) компенсировала ошибку ионосферной рефракции при измерениях фазы несущей (L1-L2). Уравнение для расчета коэффициента представляет собой:
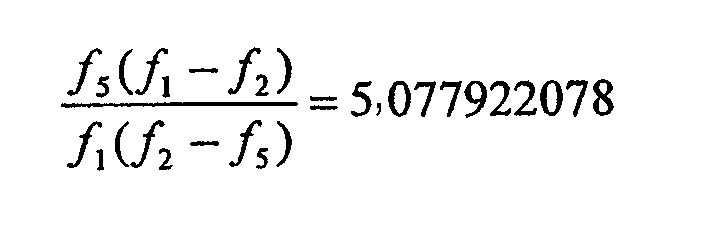
Поскольку неоднозначности в разностях измерений фазы несущих (L1-L2), (L1-L5) и (L2-L5) были разрешены на этапе 210, как описано выше, можно получить составное измерение скорректированной рефракции с разрешенной неоднозначностью на этапе 220 путем расчета:
ϕ r=(ϕ 1-ϕ 2+N12)-5,077923(ϕ 2-ϕ 5+N25) (2)
где φ r представляет составное измерение, φ 1 , φ 2 и φ 5 представляют измерение фазы несущих на частотах L1, L2 и L5, соответственно, причем для всех из них предполагается, что они были скорректированы с использованием измерений, проводимых в опорном приемнике 140 GPS, N 12 представляет собой неоднозначность разности измерений фазы несущей (L1-L2) и N 25 представляет собой неоднозначность разности измерений фазы несущей (L2-L5).
Приблизительно сверхкомбинацию в уравнении (2) можно рассматривать как линейную комбинацию измерений фазы несущих на трех частотах, формируемую путем выполнения измерений фазы несущих на частоте L1 плюс 5-кратное измерение фазы несущей на частоте L5 и минус шестикратное измерение фазы несущей на частоте L2, например, составное измерение (L1-6L2+5L5). Составное измерение (L1-6L2+5L5) имеет очень малую ошибку ионосферной рефракции по сравнению с ошибкой рефракции при измерениях фазы несущей L1. В частности, влияние ионосферы на составное измерение (L1-6L2+5L5) составляет только 7,44% от влияния ионосферы на измерения L1. Следует отметить, что составное измерение (L1-6L2+5L5) также эквивалентно сверхкомбинации разности измерений (L1-L5), уменьшенной на шестикратную разность измерения (L2-L5), то есть
(L1-6L2+5L5)=(L1-L5)-6(L2-L5).
Составное измерение фазы несущей со скорректированной рефракцией и разрешенной неоднозначностью в уравнении (2) имеет длину волны 3,4035 метров, которую можно использовать для масштабирования составного измерения до измеренной псевдодальности относительно спутника. При этом, однако, остается одна неблагоприятная характеристика, связанная с таким составным измерением. В частности, фазовый шум отдельных измерений фазы несущей существенно увеличивается за счет умножения и за счет увеличенной длины волны. Если предположить, что для трех частот фазовые шумы равны и эквивалентны 1 см на частоте L1, шумы составного измерения φr со скорректированной рефракцией и разрешенной неоднозначностью будут эквивалентны приблизительно 143 см. Предположение о равных фазовых шумах не является критичным. Например, альтернативное предположение, что фазовый шум в L1 эквивалентен одному сантиметру, и фазовый шум на каждой из других двух частот масштабирован по длине волны своей частоты, приведет к несколько меньшему значению 110 см для шума в составном измерении.
Хотя такой шум в составном измерении φr со скорректированной рефракцией, в соответствии с уравнением (2), представляется несколько бульшим, его предпочтительно сопоставим с шумом, полученным в результате использования кодовых измерений для получения результата со скорректированной рефракцией. Он несомненно лучше, чем при кодовых измерениях, потому что измерения фазы в меньшей степени подвергаются смещениям, которые могут быть обусловлены разными источниками, например, характеристиками конструкции приемника. Кроме того, даже если длина волны велика, измерения нечувствительны к фазовым циклам, обусловленным равным количеством положительных и отрицательных измерений фазы в составных измерениях. Большая часть шума в составном фазовом измерении возникает из-за многолучевого распространения, присутствующего в отдельных фазовых измерениях. Тот же способ, который ранее использовался для сглаживания многолучевого распространения при кодовых измерениях, может с выгодой использоваться для сглаживания шумов фазы из-за многолучевого распространения.
Поэтому способ 200 дополнительно включает в себя этап 230, на котором другое составное измерение фазы несущей, имеющей меньшее усиление шумов, формируется на этапе 240, на котором измерение фазы несущей с разрешенной неоднозначностью по уравнению (2) сглаживается другим составным измерением фазы несущей с малым усилением шумов. Конкретный пример составного измерения, которое близко к минимальному усилению шумов, определяется следующей формулой:
φm=4,219178φ1-1,609589(φ2+φ5) (3)
где φm представляет собой составное измерение.
Числовые значения 4,219178 и 1,609589 в уравнении (3) получены из более общего уравнения:

Составное измерение φm имеет длину волны приблизительно 10,8 см и должно было иметь уровень шума приблизительно 2,7 см в предположении равного фазового шума на каждой частоте, как предполагалось выше. Уравнение (3) или (4) не очень чувствительно к компромиссу между измерениями L2 и L1, и поскольку неоднозначности не разрешаются, любой множитель этого уравнения должен работать и для описанных ниже целей. Таким образом, отсечение коэффициентов в уравнении (3) наполовину и использование удвоенной длины волны для масштабирования составного измерения до метров обеспечит точно такое же составное измерение с точно таким же шумом в измеренном значении. Хотя φm было сформировано с использованием измерений фазы несущей для трех частот, также можно сформировать составное измерение с коррекцией рефракции, которое имеет несколько большее усиление шума, чем φm, при использовании только измерений фазы несущей L1 и L2 или только измерения фазы несущей L1 и L5.
Для получения оптимальных результатов составное измерение φm требуется отрегулировать по фазовому циклу, но оно относительно нечувствительно к какой-либо ошибке в значении фазового цикла, из-за узкой длины волны. При этом нет необходимости пытаться разрешить неоднозначность по композиции измерений, поскольку она используется просто для сглаживания шумов в составном измерении с разрешенной неоднозначностью по уравнению (2).
На фиг.3 представлен процесс 300 сглаживания, выполняемый на этапе 240. Как показано на фиг.3, процесс 300 включает в себя этап 310, на котором составное измерение φr уравнения (2) масштабируется по его длине волны 3,4035 м, и масштабированное составное измерение обозначено как R, а составное измерение φm в уравнении (3) масштабируется по его длине волны 10,8 см, и масштабированное составное измерение обозначено как S. Процесс 300 дополнительно включает в себя этап 320, на котором смещение между R и S вычисляется при каждом из множества начальных отсчетов времени измерения, и смещение сглаживается в расширяющемся среднем по множеству начальных отсчетов времени. Таким образом, на этапе 320 следующее значение итеративно вычисляется по ряду начальных отсчетов времени измерений

где k обозначает начало отсчета времени измерения, и k-1 представляет начало отсчета времени измерения до k, O представляет сглаженное смещение, n равно k, прежде чем k достигает заранее определенного максимального числа усреднения, и после этого для n поддерживается значение этого максимального числа.
Для получения окончательного сглаженного выходного измерения процесс 300 дополнительно включает в себя этап 330, на котором сглаженное смещение добавляется к высокоточному измерению S со скорректированной рефракцией для получения составного измерения M с разрешенной неоднозначностью, со скорректированной рефракцией и с минимизированным шумом
M k =O k +S k (5)
Преимущество использования этапов 320 и 330 в процессе 300 для сглаживания измерения фазы несущей с разрешенной неоднозначностью состоит в том, что можно отслеживать смещение для проверки обоснованности во время процесса сглаживания.
Количество начальных отсчетов времени измерения, по которым вычисляется уравнение (4), определяется в соответствии с квадратом отношения шумов, которое представляет собой отношение уровня шумов при φr к уровню шумов при φm . В соответствии с приведенными выше примерами, такое отношение должно составлять приблизительно 50. Таким образом, квадрат отношения шумов в соответствии с приведенными выше примерами, должен составлять приблизительно 2500. Однако в приведенных выше примерах предполагается независимый уровень шумов в каждом начале отсчета времени, в то время как многолучевое распространение обычно положительно коррелировано в течение нескольких минут. Это означает, что процесс усреднения можно эффективно продолжать по 10000 или больше начальных отсчетов времени измерений, или в течение 10000 секунд или больше, если набор измерений выполняется в каждую секунду. Процесс усреднения преобразуется в экспоненциальную среднюю величину, когда достигается максимальное количество усреднений, которое определяется по квадрату отношения шумов.
Хотя приведенные выше варианты выполнения настоящего изобретения были описаны в контексте GPS, настоящее изобретение применимо к другим системам позиционирования с незначительными модификациями. Например, в европейской системе Галилео, частоту несущей E6 на частоте (125*10,23 мГц) используют вместо частоты L2. Метод в соответствии с вариантами выполнения, описанными выше, будет работать еще лучше благодаря разности частот между E6 и L5, которая в два раза больше, чем L2 и L5. Таким образом, вместо использования сверхкомбинации по уравнению (2) в европейской системе Галилео можно использовать следующую сверхкомбинацию:
φ r=(φ l-φ e+N 1e)-2,165584416(φ e-φ 5+N e5) (6)
где нижний индекс φe представляет измерение фазы несущей на частоте E6, N 1e и N e5 представляют неоднозначности полного цикла, связанные с разностями измерений (φl-φe) и (φe -φ5), соответственно, и величина 2,165584416 была получена из результата следующего расчета
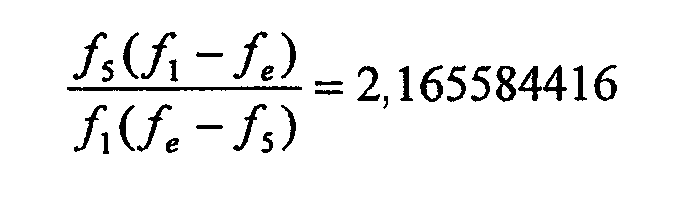
где f e обозначает частоту E6. Поскольку в уравнении (6) используется намного меньшее значение 2,165584416 по сравнению со значением 5,077923 в уравнении (2), усиление шумов в сверхкомбинации в уравнении (6) должно быть намного меньшим, чем усиление шумов в сверхкомбинации по уравнению (2). Таким образом, полученная в результате комбинация скорректированного измерения с разрешенной неоднозначностью и корректированной рефракцией потребует меньшего сглаживания для получения той же точности.
Таким образом, настоящее изобретение обеспечивает способ, предназначенный для разрешения неоднозначности в составном измерении фазы несущей со скорректированной рефракцией. Настоящее изобретение также обеспечивает способ минимизации влияния усиления шумов в составном измерении. Считается, что очень точный процесс измерений со скорректированной рефракцией и с разрешенной неоднозначностью позволяет улучшить целый ряд вариантов применения GPS. Например, он может уменьшить или устранить ограничения расстояния при дифференциальной фазе несущей GPS, которую часто называют GPS с кинематикой в режиме реального времени (RTK).
Хотя настоящее изобретение описано в отношении нескольких конкретных вариантов его выполнения, следует понимать, что в отношении него можно выполнить различные изменения, замены и модификации, без отхода от сущности и объема изобретения, которые определены приложенной формулой изобретения.
Изобретение относится к системам позиционирования. Технический результат состоит в генерировании измерений фазы несущей с разрешенной неоднозначностью, со скорректированной рефракцией и минимизированными шумами. Способ включает в себя формирование первого составного измерения с использованием измерений фазы несущей GPS на частотах L1, L2 и L5. Для уменьшения шума в первом составном измерении способ дополнительно включает в себя формирование второго составного измерения с использованием измерения фазы несущей GPS, по меньшей мере, на двух из трех несущих частот GPS. Второе составное измерение формируют так, чтобы оно имело малый шум из-за многолучевого распространения так, чтобы его можно было использовать для сглаживания первого составного измерения с получением минимизированного шума из-за многолучевого распространения. 3 н. и 16 з.п. ф-лы, 3 ил.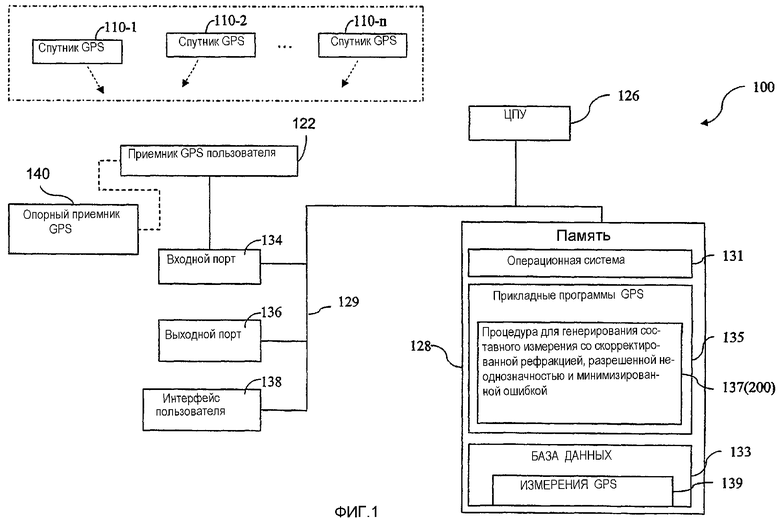
1. Способ получения измерения фазы несущей GPS с разрешенной неоднозначностью, со скорректированной рефракцией, содержащий:
получение измерений фазы несущей на трех несущих частотах;
формирование, по меньшей мере, двух измерений фазы несущей на широкой полосе, на основе измерений фазы несущей на трех несущих частотах;
разрешение неоднозначностей полного цикла в измерениях фазы несущей на широкой полосе; и
использование измерений на широкой полосе с разрешенной неоднозначностью для формирования измерения фазы несущей GPS с разрешенной неоднозначностью, со скорректированной рефракцией, включающего в себя сглаживание измерений фазы несущих, с использованием, по меньшей мере, двух измерений фазы несущей на широкой полосе.
2. Способ по п.1, в котором три частоты GPS включают в себя первую частоту, вторую частоту и третью частоту, измерения фазы несущей на широкой полосе включают в себя первое измерение фазы несущей на широкой полосе, формируемое с использованием измерений фазы несущей на первой и второй частотах, и второе измерение фазы несущей на широкой полосе, формируемое с использованием измерений фазы несущей на второй и третьей частотах, и измерение фазы несущей GPS с разрешенной неоднозначностью, со скорректированной рефракцией содержит разность между первым измерением на широкой полосе и множеством вторых измерений на широкой полосе.
3. Способ по п.1, в котором ошибка ионосферной рефракции при первом измерении на широкой полосе приблизительно равна ошибке ионосферной рефракции для множества вторых измерений на широкой полосе.
4. Способ по п.1, в котором неоднозначность полного цикла в каждом измерении фазы несущей на широкой полосе разрешают на основе частотно-взвешенного среднего значения соответствующих кодовых измерений GPS, причем ошибка частотно-взвешенного среднего значения, вызванная ионосферной рефракцией, соответствует ошибке, вызванной ионосферной рефракцией, в измерении фазы несущей на широкой полосе.
5. Способ генерирования измерения фазы несущей с разрешенной неоднозначностью, со скорректированной рефракцией и с минимизированными шумами, содержащий:
формирование первого составного измерения с использованием измерения фазы несущей GPS на трех частотах GPS, причем первое составное измерение включает в себя:
получение измерений фазы несущей на трех частотах;
формирование, по меньшей мере, двух измерений фазы несущей на широкой полосе на основе измерений фазы несущих на трех частотах; и разрешение неоднозначностей полного цикла в измерениях фазы несущей на широкой полосе; и
использование измерений на широкой полосе с разрешенной неоднозначностью для формирования первого составного измерения;
формирование второго составного измерения с использованием измерений фазы несущих GPS, по меньшей мере, на двух несущих частотах GPS; и сглаживание первого составного измерения вторым составным измерением.
6. Способ по п.5, в котором первое составное измерение представляет собой линейную комбинацию измерений фазы несущей GPS на трех несущих частотах GPS.
7. Способ по п.5, в котором неоднозначность полного цикла в каждом измерении фазы несущей на широкой полосе разрешают на основе частотно-взвешенного среднего значения соответствующих кодовых измерений GPS, причем ошибка, вызванная ионосферной рефракцией, в частотно-взвешенном среднем значении, соответствует ошибке, вызванной ионосферной рефракцией, в измерениях фазы несущих на широкой полосе.
8. Способ по п.5, в котором второе составное измерение сформировано так, что оно имеет малые шумы, связанные с многолучевым распространением.
9. Способ по п.5, в котором второе составное измерение сформировано с использованием измерений фазы несущей на всех трех частотах.
10. Способ по п.5, в котором второе составное измерение включает в себя неразрешенные неоднозначности полного цикла.
11. Способ по п.5, в котором второе составное измерение имеет длину волны приблизительно 10,8 см.
12. Способ по п.11, в котором второе составное измерение имеет уровень шумов приблизительно 2,7 см, в предположении равных фазовых шумов в каждом из измерений фазы несущей на трех частотах.
13. Способ по п.5, в котором первое и второе составное измерения масштабируют по их соответствующим длинам волн, причем сглаживание первого составного измерения вторым составным измерением содержит:
вычисление смещения между первым составным измерением и вторым составным измерением для каждого из множества начальных отсчетов времени измерения;
сглаживание смещения в расширении среднего на множество начальных отсчетов времени измерения; и
добавление сглаженного смещения ко второму составному измерению для получения измерения фазы несущей GPS с разрешенной неоднозначностью, со скорректированной рефракцией и минимизированными шумами.
14. Система позиционирования или навигации, содержащая:
приемник GPS, выполненный с возможностью получения кода GPS и измерения фазы несущей на основе сигналов от множества спутников, находящихся в поле зрения приемника GPS, причем эти сигналы передают на трех разных несущих частотах;
компьютерная система, соединенная с приемником GPS, причем компьютерная система включает в себя процессор и запоминающее устройство, связанное с процессором, причем в запоминающем устройстве записаны программные инструкции, которые при выполнении их процессором, выполняют способ генерирования составных измерений фазы несущих с разрешенной неоднозначностью, со скорректированной рефракцией и минимизированными шумами, при этом программные инструкции содержат:
инструкции для формирования первого составного измерения с использованием измерений фазы несущей GPS на трех несущих частотах GPS, причем инструкции для формирования первого составного измерения включают в себя:
получение измерений фазы несущих на трех частотах;
формирование, по меньшей мере, двух измерений фазы несущей на широкой полосе на основе измерений фазы несущей на этих трех частотах;
и
разрешение неоднозначностей полного цикла в измерениях фазы несущей
на широкой полосе; и
использование измерений на широкой полосе с разрешенной
неоднозначностью для формирования первого составного измерения;
инструкции для формирования второго составного измерения с использованием измерений фазы несущей GPS, по меньшей мере, на двух несущих частотах GPS; и
инструкции для сглаживания первого составного измерения вторым составным измерением.
15. Система позиционирования по п.14, в которой инструкции для формирования первого составного измерения содержат:
инструкции для формирования, по меньшей мере, двух измерений фазы несущей на широкой полосе на основе измерений фазы несущей на трех несущих частотах;
инструкции для разрешения неоднозначности полного цикла в измерениях
фазы несущей на широкой полосе; и
инструкции для использования измерений на широкой полосе с разрешенной неоднозначностью, для формирования первого составного измерения.
16. Система позиционирования по п.14, в которой второе составное измерение сформировано с малым шумом из-за многолучевого распространения.
17. Система позиционирования по п.14, в которой второе составное измерение сформировано с использованием измерений фазы несущей на всех трех частотах.
18. Система позиционирования по п.14, в которой второе составное измерение включает в себя неразрешенные неоднозначности полного цикла.
19. Система позиционирования по п.14, в которой инструкции для сглаживания первого составного измерения вторым составным измерением содержат:
инструкции для вычисления смещения между первым составным измерением и вторым составным измерением в каждом из множества начальных отсчетов времени измерения;
инструкции для сглаживания смещения в расширении среднего значения на множество начальных отсчетов времени измерения; и
инструкции для добавления сглаженного смещения ко второму составному измерению для получения измерения фазы несущей GPS с разрешенной неоднозначностью, со скорректированной рефракцией и минимизированными шумами.
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ОБЪЕКТОВ ПО РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2115137C1 |
| ЦИФРОВОЙ ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ | 1995 |
|
RU2090902C1 |
| US 5805108 A, 08.09.1998. | |||

