Изобретение относится к авиационной технике и может быть использовано в бортовой пассивной РЛС и автоматической системе управления самолета.
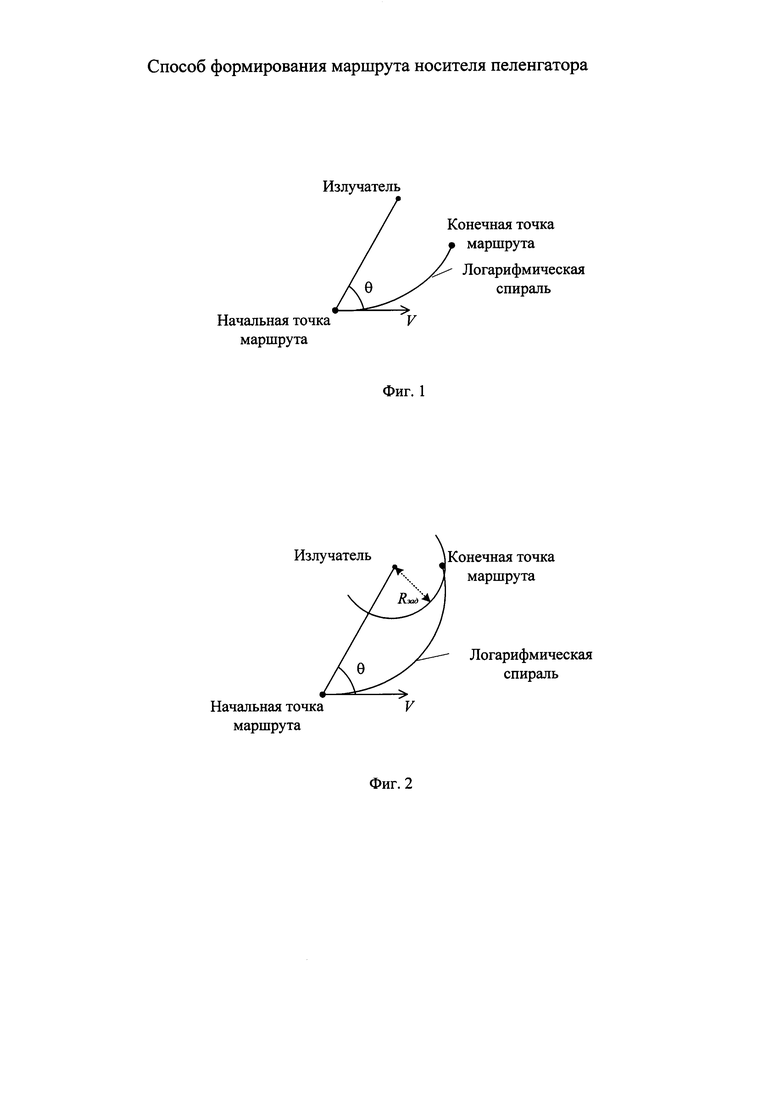
Известен способ формирования маршрута носителя пеленгатора, определяющего местоположение неподвижного излучателя (патент RU №2373549, 20.11.2009, заявка №2008121681, 28.05.2008 г.), взятый в качестве прототипа. Сущность прототипа заключается в том, что в способе, при котором в начальной точке маршрута на носителе пеленгатором измеряют пеленг неподвижного излучателя относительно носителя пеленгатора, затем носитель пеленгатора перемещается из начальной точки под углом θопт относительно направления на излучатель, где θопт есть решение выражения T(DR,θ)→min, где T(DR,θ) - время определения дальности до излучающего объекта, DR - необходимая дисперсия ошибки определения дальности до излучателя, θ - угол между вектором путевой скорости и направлением на излучатель, при этом в процессе движения носителя непрерывно измеряется пеленгатором пеленг излучателя, пройденное носителем расстояние измеряется автономной навигационной системой носителя, кроме этого в момент, когда дисперсия ошибки определения дальности D до излучателя станет равной необходимому значению DR, по совокупности полученных измерений пеленга излучателя и координат носителя определяется дальность до цели, при этом путь от начальной точки движения носителя до точки когда D=DR является формируемым маршрутом носителя пеленгатора (фиг. 1).
Недостатком указанного способа является низкая вероятность вывода носителя на заданное расстояние от излучателя в конечной точке маршрута.
Техническим результатом предлагаемого способа является определение местоположения источника излучения с точностью не хуже заданной и выводом носителя пеленгатора на заданное расстояние от излучателя в конечной точке маршрута.
Указанный технический результат достигается тем, что в известном способе, при котором в начальной точке маршрута на носителе пеленгатором измеряют пеленг неподвижного излучателя относительно носителя пеленгатора, затем носитель пеленгатора перемещается из начальной точки под углом θопт относительно направления на излучатель, где θопт есть решение выражения T(DR,θ)→min, где T(DR,θ) - время определения дальности до излучающего объекта, DR - необходимая дисперсия ошибки определения дальности до излучателя, θ - угол между вектором путевой скорости и направлением на излучатель, при этом в процессе движения носителя непрерывно измеряется пеленгатором пеленг излучателя, пройденное носителем расстояние измеряется автономной навигационной системой носителя, кроме этого в момент, когда дисперсия ошибки определения дальности D до излучателя станет равной необходимому значению DR, по совокупности полученных измерений пеленга излучателя и координат носителя определяется дальность до цели и конечная точка маршрута, согласно изобретению конечную точку формируемого маршрута носителя пеленгатора определяют из одновременного выполнения двух условий: D≤DR и R≤Rзад, где R - оценка дальности до излучателя относительно носителя, Rзад - заданное расстояние от носителя до излучателя в конечной точке маршрута.
Сущность изобретения заключается в следующем (фиг. 2). Носитель пеленгатора движется с постоянным бортовым пеленгом излучателя θ, который отсчитывается относительно направления путевой скорости V. При таком движении носитель пеленгатора описывает логарифмическую спираль, сближаясь с излучателем. Максимальная скорость носителя ограничивается его техническими характеристиками, поэтому считаем путевую скорость V фиксированной. На носителе с помощью пеленгатора непрерывно измеряют пеленг неподвижного излучателя относительно носителя пеленгатора, при этом собственные координаты носителя измеряют автономной навигационной системой носителя. В процессе движения по совокупности полученных измерений пеленга излучателя и координат носителя одним из известных способов получают оценку дальности R излучателя относительно носителя. По известному местоположению носителя, измеренным пеленгу излучателя и дальности до него становится известным местоположение излучателя на плоскости.
Заданное расстояние от носителя до излучателя в конечной точке маршрута представляет собой заданное значение Rзад, являющиеся максимально допустимым расстоянием от носителя до излучателя в конечной точке маршрута.
Новизна предложенного способа состоит в том, что при получении точности не хуже заданной в конечной точке маршрута носитель оказывается на изначально известном расстоянии от излучателя. Отличие от прототипа заключается в том, что конечной точкой формируемого маршрута носителя пеленгатора является точка, принадлежащая заданной области.
Способ может быть реализован, например, с помощью аппаратуры носителя, включающей в себя: пеленгатор, автономную навигационную систему носителя, бортовую цифровую вычислительную машину.
Таким образом, предложенный способ позволяет сформировать маршрут носителя пеленгатора, определяющего местоположение излучателя, при котором достигается необходимая точность и носитель в конце маршрута оказывается на заданном расстоянии от излучателя. Этот способ полезен для решения задачи выхода летательных аппаратов в зону поражения целей и при проведении спасательных операций, когда необходимо выйти в зону поиска.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ МАРШРУТА НОСИТЕЛЯ ПЕЛЕНГАТОРА, ОПРЕДЕЛЯЮЩЕГО МЕСТОПОЛОЖЕНИЕ НЕПОДВИЖНОГО ИЗЛУЧАТЕЛЯ | 2008 |
|
RU2373549C1 |
| СПОСОБ ФОРМИРОВАНИЯ МАРШРУТА НОСИТЕЛЯ ПЕЛЕНГАТОРА, ОПРЕДЕЛЯЮЩЕГО МЕСТОПОЛОЖЕНИЕ ИЗЛУЧАТЕЛЯ | 2007 |
|
RU2357266C1 |
| СПОСОБ ФОРМИРОВАНИЯ МАРШРУТА НОСИТЕЛЯ ПЕЛЕНГАТОРА, ОПРЕДЕЛЯЮЩЕГО МЕСТОПОЛОЖЕНИЕ ИЗЛУЧАТЕЛЯ МЕТОДОМ ТРИАНГУЛЯЦИИ | 2005 |
|
RU2303794C2 |
| СПОСОБ ПРОВЕРКИ ТОЧНОСТИ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2789714C1 |
| СПОСОБ ТРИАНГУЛЯЦИИ ЦЕЛЕЙ | 2010 |
|
RU2423720C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2551355C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА ПЕРЕНОСНЫМ ПЕЛЕНГАТОРОМ | 2009 |
|
RU2405166C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2018 |
|
RU2695642C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОПЕРЕДАТЧИКА МОБИЛЬНОЙ СТАНЦИЕЙ РАДИОКОНТРОЛЯ | 2006 |
|
RU2307372C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ ТРИАНГУЛЯЦИОННЫМ МЕТОДОМ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2834975C1 |
Изобретение относится к авиационной технике и может быть использовано в бортовой пассивной РЛС и автоматической системе управления самолета. Достигаемый технический результат - формирование маршрута носителя пеленгатора, определяющего местоположение излучателя, при котором достигается необходимая точность и носитель в конце маршрута оказывается на заданном расстоянии от излучателя в конечной точке маршрута. Указанный результат достигается за счет того, что в начальной точке маршрута на носителе пеленгатором измеряют пеленг неподвижного излучателя относительно носителя пеленгатора, затем носитель пеленгатора перемещается из начальной точки под углом θопт относительно направления на излучатель, где θопт есть решение выражения T(DR,θ)→min, где T(DR,θ) - время определения дальности до излучающего объекта, DR - необходимая дисперсия ошибки определения дальности до излучателя, θ - угол между вектором путевой скорости и направлением на излучатель, при этом в процессе движения носителя непрерывно измеряется пеленгатором пеленг излучателя, пройденное носителем расстояние измеряется автономной навигационной системой носителя, кроме этого в момент, когда дисперсия ошибки определения дальности D до излучателя станет равной необходимому значению DR, по совокупности полученных измерений пеленга излучателя и координат носителя определяется дальность до цели и конечная точка маршрута, при этом конечную точку формируемого маршрута носителя пеленгатора определяют из одновременного выполнения двух условий: D≤DR и R≤Rзад, где R - оценка дальности до излучателя относительно носителя, Rзад - заданное расстояние от носителя до излучателя в конечной точке маршрута. 2 ил.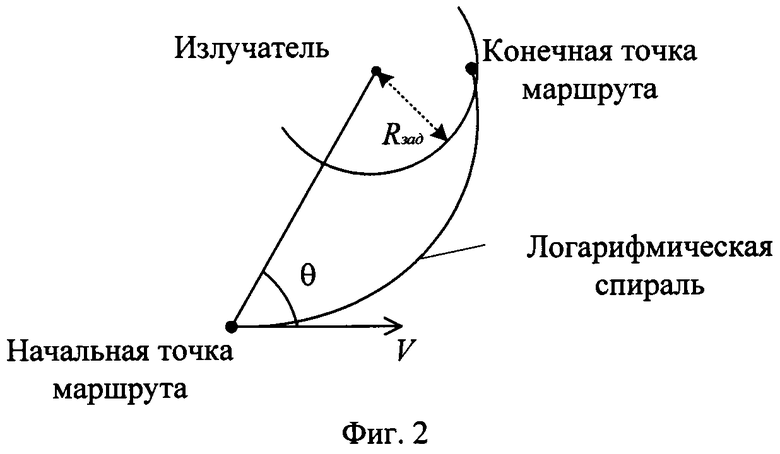
Способ формирования маршрута носителя пеленгатора, основанный на определении местоположения излучателя с выводом носителя на заданное расстояние от излучателя в конечной точке маршрута, при котором в начальной точке маршрута на носителе пеленгатором измеряют пеленг неподвижного излучателя относительно носителя пеленгатора, затем носитель пеленгатора перемещается из начальной точки под углом θопт относительно направления на излучатель, где θопт есть решение выражения T(DR,θ)→min, где T(DR,θ) - время определения дальности до излучающего объекта, DR - необходимая дисперсия ошибки определения дальности до излучателя, θ - угол между вектором путевой скорости и направлением на излучатель, при этом в процессе движения носителя непрерывно измеряется пеленгатором пеленг излучателя, пройденное носителем расстояние измеряется автономной навигационной системой носителя, кроме этого в момент, когда дисперсия ошибки определения дальности D до излучателя станет равной необходимому значению DR, по совокупности полученных измерений пеленга излучателя и координат носителя определяется дальность до цели и конечная точка маршрута, отличающийся тем, что конечную точку формируемого маршрута носителя пеленгатора определяют из одновременного выполнения двух условий: D≤DR и R≤Rзад, где R - оценка дальности до излучателя относительно носителя, Rзад - заданное расстояние от носителя до излучателя в конечной точке маршрута.

