Изобретение относится к авиационной технике и может быть использовано в бортовой пассивной РЛС и автоматической системе управления самолета.
Известен способ формирования маршрута носителя пеленгатора (Емельянов Д.Д. Об одной задаче управления наблюдениями // Автоматика и телемеханика. - 1997. - №10. - с.47-58). Сущность способа состоит в том, что носитель пеленгатора движется со скоростью, проекция которой на направление на неподвижный излучатель постоянна; по измерениям угловых координат излучателя формируются управляющие воздействия на носитель пеленгатора в поперечном направлении. В результате формируется криволинейный маршрут, при котором минимизируются совместно ошибки измерения дальности до излучателя и расход энергии на управление. Недостатком этого способа является то, что продольная составляющая скорости (в направлении на излучатель) фиксирована.
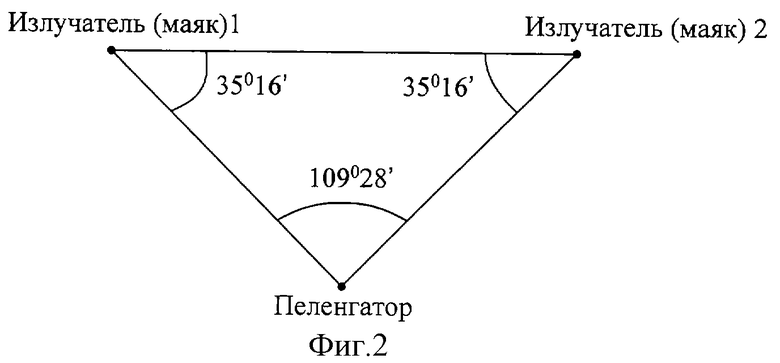
В качестве прототипа выбран способ определения точки на местности, в которой точность определения местоположения носителя пеленгатора методом триангуляции наилучшая (Ярлыков М.С. Статистическая теория радионавигации. - М.: Радио и связь, 1985, с.57), (Белавин О.В. Основы радионавигации. Уч. пос. - М.: Сов. радио, 1977, с.40). На носителе определяется его собственное местоположение относительно двух неподвижных излучателей с известными координатами (маяков). Для этого с помощью пеленгатора определяют углы между направлением на север и направлениями на излучатели (пеленги излучателей). Так как географические координаты излучателей известны, то в треугольнике, образованном двумя излучателями и носителем пеленгатора, известны одна сторона и два угла. Методом триангуляции (Большой энциклопедический словарь политехнический. - М.: Большая Российская энциклопедия, 2000) определяют дальности от носителя пеленгатора до излучателей. Известно, что при навигации вблизи поверхности Земли, когда дальности до излучателей много больше высоты носителя пеленгатора, задачу определения местоположения носителя пеленгатора в пространстве обычно сводят к задаче определения местоположения пеленгатора на плоскости (Ярлыков М.С. Статистическая теория радионавигации. - М.: Радио и связь, 1985, с.26). Дальность до второго излучателя (фиг.1) определяется по формуле:

где D - известное расстояние между излучателями (база); γ1 - известный пеленг второго излучателя относительно точки расположения первого излучателя; α1, α2 - пеленги первого и второго излучателя соответственно, измеренные пеленгатором.
По известному местоположению излучателя и измеренным пеленгу излучателя и дальности до него становится известным местоположение носителя пеленгатора на плоскости.
Из-за погрешностей пеленгатора возможно неточное определение местоположения носителя. Точность определения местоположения носителя наилучшая только при определенном положении носителя относительно излучателей.
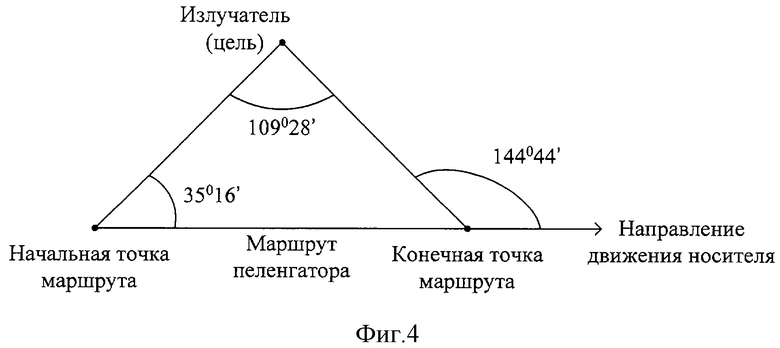
Сущность способа заключается в следующем. Строится равнобедренный треугольник, двумя вершинами которого являются излучатели, а величины одинаковых углов при этих вершинах равны 35°16′ (фиг.2). Третья вершина треугольника является точкой, в которой точность определения местоположения носителя пеленгатора наилучшая. Недостатком указанного способа является невозможность его применения для выбора маршрута носителя пеленгатора, определяющего местоположение неподвижного излучателя (цели).
Техническим результатом предлагаемого способа является повышение точности определения местоположения излучателя (цели) методом триангуляции.
Сущность предлагаемого способа формирования маршрута носителя пеленгатора заключается в том, что в начальной точке маршрута, на носителе, пеленгатором измеряют пеленг неподвижного излучателя относительно носителя пеленгатора, затем, при перемещении носителя пеленгатора из начальной точки по прямой под углом 35°16′ относительно направления на излучатель, непрерывно измеряют пеленгатором пеленг излучателя, при этом пройденное носителем расстояние измеряют автономной навигационной системой носителя, в момент, когда угол между направлением движения носителя пеленгатора и направлением на излучатель станет равным 180°-35°16′=144°44′, производят вычисление местоположения излучателя триангуляционном методом, при этом отрезок между начальной точкой движения носителя и точкой, когда направление на излучатель равно 144°44′, является формируемым маршрутом носителя пеленгатора.
Сущность изобретения поясняется следующим.
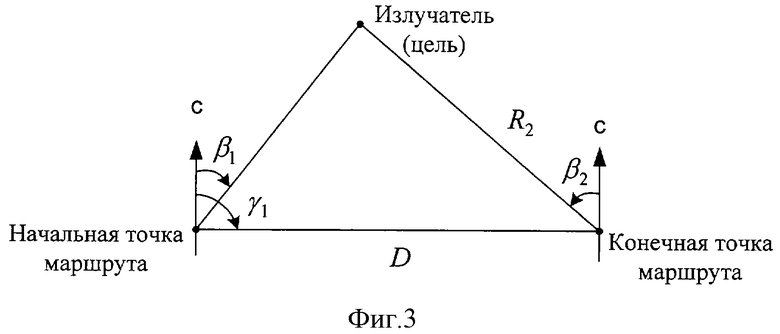
На движущемся носителе пеленгатора решается задача определения местоположения излучателя (цели) относительно носителя методом триангуляции. Для этого пеленгатором измеряется угол между направлением на север и направлением на излучатель (пеленг излучателя) сначала в начальной точке маршрута, а затем - в конечной точке маршрута, координаты начальной и конечной точек маршрута измеряются автономной навигационной системой носителя (фиг.3). В треугольнике, образованном излучателем, начальной и конечной точками маршрута, известна одна сторона и два угла (так же, как и в прототипе). Высотой носителя пренебрегаем, т.к. она много меньше дальности до излучателя. Методом триангуляции определяют дальность излучателя относительно конечной точки маршрута по формуле

где D - известное расстояние между начальной и конечной точкой маршрута; γ1 - известный угол между северным направлением и направлением на конечную точку маршрута относительно начальной точки маршрута; β1, β2 - пеленги излучателя, измеряемые пеленгатором в начальной и конечной точках маршрута соответственно. По известному местоположению носителя пеленгатора и измеренным пеленгу излучателя и дальности до него становится известным местоположение излучателя на плоскости.
Из-за погрешностей пеленгатора возможно неточное определение местоположения излучателя. Из сравнения функций (1) и (2) следует, что с погрешностями измеряются одинаковые переменные: одно из слагаемых аргумента функции синус в числителе и оба слагаемых аргумента функции синус в знаменателе. Поэтому условия, при которых точность определения дальности наилучшая, одинаковы в обоих случаях.
Из прототипа известно, что точность определения дальности наилучшая, если указанный треугольник является равнобедренным, величины одинаковых углов которого равны 35°16′. Отличие от прототипа заключается в том, что вершинами треугольника являются: один излучатель, начальная и конечная точки маршрута носителя пеленгатора. Отрезок между начальной и конечной точками является маршрутом пеленгатора, при этом точность определения местоположения излучателя будет наилучшей.
Предложенный способ реализуется на носителе пеленгатора следующим образом.
На носителе пеленгатора в начальной точке маршрута измеряется пеленг излучателя (фиг.4). Затем носитель пеленгатора перемещается по прямой из начальной точки маршрута под углом 35°16′ относительно направления на излучатель, при этом непрерывно измеряется пеленг излучателя и пройденное расстояние от начальной точки маршрута пеленгатора. В момент, когда угол между направлением движения носителя и направлением на излучатель станет равным 180°-35°16′=144°44′, носитель будет находиться в конечной точке маршрута. Описанным выше способом (триангуляции) производится вычисление местоположение излучателя, при этом точность будет наилучшей.
Новизна предложенного способа заключается в том, что известный способ достижения наилучшей точности определения местоположения носителя пеленгатора используется для решения другой задачи: достижение наилучшей точности определения местоположения излучателя. Отличие от прототипа заключается в том, что вершинами треугольника являются не два излучателя и носитель пеленгатора, а один излучатель и начальная и конечная точки маршрута носителя пеленгатора.
Таким образом, предложенный способ позволяет сформировать маршрут носителя пеленгатора, определяющего местоположение неподвижного излучателя методом триангуляции, при котором точность будет наилучшей. Этот способ полезен для решения задачи радиотехнической разведки, где по угломерным данным измеряют дальность до РЛС. В этих условиях предложенный способ позволяет достичь наилучшей точности определения местоположения РЛС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ МАРШРУТА НОСИТЕЛЯ ПЕЛЕНГАТОРА, ОПРЕДЕЛЯЮЩЕГО МЕСТОПОЛОЖЕНИЕ ИЗЛУЧАТЕЛЯ | 2007 |
|
RU2357266C1 |
| СПОСОБ ФОРМИРОВАНИЯ МАРШРУТА НОСИТЕЛЯ ПЕЛЕНГАТОРА, ОПРЕДЕЛЯЮЩЕГО МЕСТОПОЛОЖЕНИЕ НЕПОДВИЖНОГО ИЗЛУЧАТЕЛЯ | 2008 |
|
RU2373549C1 |
| Способ формирования маршрута носителя пеленгатора | 2016 |
|
RU2617127C1 |
| СПОСОБ ТРИАНГУЛЯЦИИ ЦЕЛЕЙ | 2010 |
|
RU2423720C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ ТРИАНГУЛЯЦИОННЫМ МЕТОДОМ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2834975C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО РАДИОИЗЛУЧАЮЩЕГО ОБЪЕКТА | 2020 |
|
RU2739060C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НЕПОДВИЖНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПРИ ОДНОКООРДИНАТНОЙ ПЕЛЕНГАЦИИ В СВЯЗАННОЙ СИСТЕМЕ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2834277C1 |
| Система пассивной локации для определения координат летательного аппарата в ближней зоне аэродрома и на этапе захода на посадку с резервным каналом определения дальности | 2016 |
|
RU2633380C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ИЗЛУЧЕНИЯ ФАЗОВЫМ ПЕЛЕНГАТОРОМ НА КВАДРОКОПТЕРЕ | 2021 |
|
RU2792039C2 |
| Способ определения дальности до неподвижного источника излучения движущимся пеленгатором | 2016 |
|
RU2617447C1 |
Изобретение относится к авиационной (морской) технике и может быть использовано в бортовом пеленгаторе самолета (корабля, подводной лодки). Достигаемым техническим результатом является повышение точности определения местоположения излучателя. Для этого пеленгатором измеряется пеленг излучателя сначала в одной точке, а затем - во второй, расстояние между которыми измеряется автономной навигационной системой носителя. Методом триангуляции определяют местоположение излучателя относительно носителя. Предложенный способ позволяет по одному пеленгу на излучатель определить положение следующей точки пеленгации, в которой точность определения местоположения цели будет наилучшей. Отрезок между двумя точками пеленгации является маршрутом пеленгатора. 4 ил.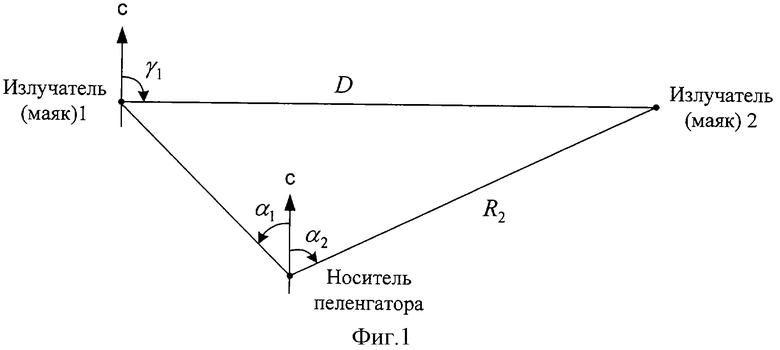
Способ формирования маршрута носителя пеленгатора, определяющего местоположение излучателя методом триангуляции, отличающийся тем, что в начальной точке маршрута, на носителе, пеленгатором измеряют пеленг неподвижного излучателя относительно носителя пеленгатора, затем, при перемещении носителя пеленгатора из начальной точки по прямой под углом 35°16′ относительно направления на излучатель, непрерывно измеряют пеленгатором пеленг излучателя, при этом пройденное носителем расстояние измеряют автономной навигационной системой носителя, в момент, когда угол между направлением движения носителя пеленгатора и направлением на излучатель станет равным 180°-35°16′=144°44′, производят вычисление местоположения излучателя триангуляционным методом, при этом отрезок между начальной точкой движения носителя и точкой, когда направление на излучатель равно 144°44′, является формируемым маршрутом носителя пеленгатора.
| ЯРЛЫКОВ М.С | |||
| Статистическая теория радионавигации | |||
| - М.: Радио и связь, 1985, с.57 | |||
| ТРИАНГУЛЯЦИОННЫЙ СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ЦЕЛИ В РЛС СОПРОВОЖДЕНИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ. | 1995 |
|
RU2099742C1 |
| СПОСОБ ПРОВЕДЕНИЯ НАТУРНО-МОДЕЛЬНЫХ ИСПЫТАНИЙ РАДИОЭЛЕКТРОННЫХ СИСТЕМ | 1997 |
|
RU2137193C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И СКОРОСТИ СБЛИЖЕНИЯ С НИМИ В ОДНОПОЗИЦИОННЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2002 |
|
RU2232402C2 |
| US 5197691 А, 30.03.1993 | |||
| DE 3034838 C1, 29.11.1990 | |||
| WO 9829756 A1, 09.07.1998. | |||

