Изобретение относится к области радиотехники и может быть использовано для радиолокационного обзора участков пространства, заранее заданного картой местности.
В ряде случаев информация о целях во всем пространстве обзора РЛС не требуется. Так, например, для радиолокационного наблюдения за протяженным по углу обзора объектом, занимающим небольшой диапазон дальностей для каждого угла поворота луча радиолокационной станции (РЛС), такой как река, дорога, граница, известные способы [1-4] наблюдения с использованием радиолокации приводят к избыточности информации, которую несет отраженный сигнал. Сведения об интересующей области пространства содержатся лишь в малой его части.
Наиболее близким к предлагаемому является способ стробоскопической обработки отраженного сигнала [5]. Стробоскопическая обработка позволяет растянуть во времени полезный участок отраженного сигнала, или, что эквивалентно, сжать его спектр. При этом понижаются требования к быстродействию и широкополосности тракта обработки информации о цели. Для применения стробоскопической обработки отраженного сигнала требуется его повторяемость, которая достигается периодическим излучением зондирующего сигнала РЛС.
На Фиг.1 представлена структурная схема стробоскопического преобразователя [6], содержащая стробоскопический смеситель (перемножитель) входного сигнала S(t) и стробирующих импульсов A(t), а также низкочастотный фильтр, настроенный на разностную частоту несущих. Выходной сигнал y(t) стробоскопического преобразователя на входе фильтра низких частот определяется выражением [5]:

где h(t-τ) - огибающая импульсной характеристики объекта наблюдения,
S(t) - импульсы зондирования с периодом T,
A(t) - стробирующие импульсы с периодом Тс,
k - номер периода (k=1, 2, … N),
N=T/(T-Tc) - коэффициент сжатия спектра, причем (Т-Тc)<<Т.
Объектам, занимающим небольшой диапазон по дальности, соответствует лишь малая часть всего отклика на зондирующий импульс РЛС. Непосредственная стробоскопическая обработка в преобразователе этого отклика имеет недостаток, связанный с наличием в сигнале большого количества избыточной информации, которая не относится к интересующему интервалу расстояний. Это повышает требования к устройствам обработки и анализа данных систем радиолокационного наблюдения, ухудшает их технико-экономические показатели.
Предлагаемое изобретение направлено на устранение информационной избыточности отраженного сигнала РЛС.
Стробоскопической обработке подвергается только та его часть, которая соответствует предварительно заданному картой местности диапазону расстояний [ρ(φ),ρ(φ)+Δρ] для данного угла поворота φ (азимута) луча радиолокатора, или временному интервалу t∈[t(φ),t(φ)+Δt] в отраженном сигнале. На Фиг.2 показан протяженный объект, для которого диапазон дальностей наблюдения зависит от азимута луча РЛС. На Фиг.3 изображено семейство откликов на зондирующий импульс РЛС для разного угла поворота луча антенны. Фиг.4 иллюстрирует возможную структурную схему системы стробоскопической обработки, реализующую предлагаемый способ.
Цель изобретения достигается в задании такого временного положения стробирующих импульсов внутри периодов повторения отраженного сигнала, которое соответствует интересующему диапазону расстояний до объекта на карте местности. При последовательном однолучевом сканировании пространства по углу [3] временной диапазон и положение стробов делаются зависимыми от азимута φ луча РЛС в соответствии с траекторией на карте.
Пусть интересующий диапазон расстояний соответствует интервалу времен [t(φ),t(φ)+Δt] в отраженном сигнале, тогда, располагая стробирующие импульсы только в этом интервале, в РЛС не будет поступать избыточная информация об остальном пространстве; кроме того, при этом достигается сжатие спектра. Выходной сигнал стробоскопического преобразователя до фильтра в таком случае

где h(t-τ) - огибающая импульсной характеристики объекта наблюдения,
S(t) - импульсы зондирования с периодом Т,
A(t) - стробирующие импульсы с периодом Тс,
k - номер периода (k=m, m+1, … n),
m и n - номера стробов, которыми начинается и заканчивается стробирование интересующего интервала отклика для диапазона расстояний [ρ(φ),ρ(φ)+Δρ] и заданного угла φ, причем этот интервал значительно короче полной длительности отраженного от местности сигнала (Δρ<<ρ(φ)). Отраженный сигнал для объектов, не лежащих в интересующем интервале расстояний, не сканируется стробирующими импульсами, благодаря чему происходит устранение информационной избыточности стробоскопически преобразованного сигнала.
Структурная схема системы стробоскопической обработки, основанной на предлагаемом способе, показана на Фиг.4. Сигнал с приемника РЛС поступает на стробоскопический преобразователь и далее на блок регистрации и обработки информации. Формирователь стробов работает под управлением блока задания временного положения стробов, на который поступает информация о текущем угле φ и зависимость t(φ), определяющая начало интервала времени, в котором будет производиться стробоскопическая обработка.
Предлагаемый способ дополнительно улучшает помехозащищенность системы наблюдения, так как регистрируется лишь интересующая часть отраженного сигнала. Количество необходимых периодов повторения зондирующего сигнала для стробоскопической обработки при таком задании положения стробов сокращается и определяется только глубиной обзора пространства и степенью сжатия спектра.
Источники информации
1. Радиолокационные методы исследования земли. / Под ред. Ю.А.Мельника. - М.: Сов. радио, 1980. - 264 с.
2. Теоретические основы радиолокации. / Под ред. Я.Д.Ширмана. - М: Сов. радио, 1970. - 560 с.
3. Финкелыдтейн М.И. Основы радиолокации: Учебник для вузов. - М: Радио и связь, 1983. - 536 с.
4. Найденов А.И. Трансформация спектра наносекундных импульсов. - М.: Сов. Радио, 1973. - 180 с.
5. Захарченко В.Д. Обработка сложных радиосигналов стробоскопическими методами // АН СССР. Радиотехника и электроника. - 1980. - №10. - С.2099-2104 (прототип).
6. Захарченко В.Д. Вопросы теории стробоскопического преобразования узкополосных периодических сигналов // Изв. ВУЗов СССР. Приборостроение. - 1976. - №10. - С.5-8.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО КОНТРОЛЯ | 2010 |
|
RU2469350C2 |
| ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2344439C1 |
| ПАССИВНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134891C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПО ДАЛЬНОСТИ И АЗИМУТУ | 2005 |
|
RU2287879C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ | 1995 |
|
RU2099738C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ УЧАСТКА ЗЕМНОЙ ПОВЕРХНОСТИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ (ВАРИАНТЫ) | 2012 |
|
RU2526850C2 |
| СПОСОБ И УСТРОЙСТВО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ ПО УГЛОВЫМ НАПРАВЛЕНИЯМ В ОБЗОРНЫХ РЛС | 2011 |
|
RU2480782C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2021 |
|
RU2760828C1 |
| Способ обнаружения наземных движущихся целей бортовой радиолокационной станцией | 2018 |
|
RU2691771C1 |
Изобретение относится к области радиотехники и может быть использовано для радиолокационного наблюдения за протяженными по азимуту объектами небольшой пространственной глубины, такими как границы, судоходные каналы, дороги. Заявленный способ использует стробоскопическую обработку отраженного от целей сигнала, при помощи которой с изменением начального положения стробирующих импульсов производится селекция объекта наблюдения, занимающего малый диапазон расстояний для каждого угла поворота луча радилокатора. Расположение стробирующих импульсов задается заранее исходя из карты местности таким образом, чтобы выделять в отраженном сигнале только интервал, соответствующий интересующему объекту. Достигаемыми техническими результатами изобретения являются сжатие спектра отраженного сигнала, что упрощает регистрацию, обработку и передачу его по каналам связи, устранение информационной избыточности и увеличение помехоустойчивости, так как выделяются данные только о заданном интервале расстояний. 4 ил.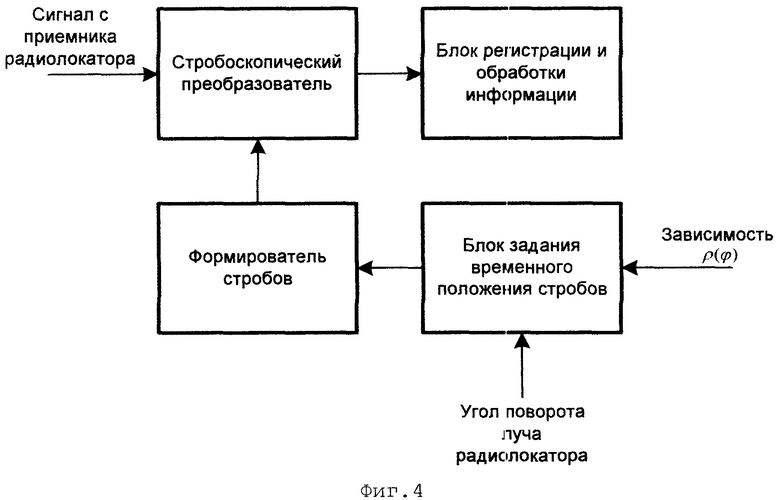
Способ радиолокационного контроля протяженного участка пространства с использованием стробоскопического преобразования, отличающийся тем, что диапазон временного изменения положения стробирующих импульсов радиолокационной станции (РЛС) t∈[t(φ),t(φ)+Δt] задается внутри периодического отраженного сигнала в зависимости от угла поворота φ луча антенны РЛС для контроля заранее определенного картой местности диапазона дальностей, где t(φ) - зависимость, определяющая начало интервала времени для формирования стробирующих импульсов для данного угла поворота φ луча антенны РЛС, Δt - временной интервал, определяющий положение стробирующих импульсов с возможностью обеспечения устранения информационной избыточности отраженного сигнала РЛС.
| ЗАХАРЧЕНКО В.Д | |||
| Обработка сложных радиосигналов стробоскопическими методами | |||
| АН СССР | |||
| Ж | |||
| Радиотехника и радиоэлектроника | |||
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| СПОСОБ ФОРМИРОВАНИЯ И УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОБЗОРА ОКРУЖАЮЩЕЙ ПОВЕРХНОСТИ С РАСШИРЕННОЙ ЗОНОЙ ОБНАРУЖЕНИЯ | 2003 |
|
RU2265865C2 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ | 1998 |
|
RU2143708C1 |
| СТРОБОСКОПИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ | 1997 |
|
RU2136006C1 |
| US 5280286 А, 18.01.1994 | |||
| US 5361070 А, 01.11.1994 | |||
| US 4948247, 14.08.1990 | |||
| ЕР 1486798 А2, 15.12.2004. | |||

