Настоящее изобретение относится к способу и устройству для управления воздушным судном во время пробега его по земле, а также к воздушному судну, снабженному таким устройством.
Известно, что управление воздушным судном на земле, а именно управление поворотом указанного воздушного судна, в основном осуществляют с помощью руля направления и управляемой передней опоры шасси, расположенной вблизи носа последнего (обычно называемой носовым колесом). С этой целью управление рулем направления и управляемой передней опорой шасси осуществляется от рычага управления рулем направления, находящегося в распоряжении пилота. Например, при нажатии на правую часть рычага управления рулем направления с него передается требование пилота на создание момента относительно вертикальной оси, стремящегося переместить нос воздушного судна в правую сторону, причем этот момент относительно вертикальной оси получается при отклонении вправо руля направления и управляемой передней опоры шасси.
Кроме того, известно, что торможение при пробеге обеспечивается тормозами, установленными на колесах опор шасси, а также интерцепторами (аэродинамическими тормозами), способными увеличивать лобовое сопротивление воздушного судна и устойчиво удерживать его на земле, чтобы тем самым повышать эффективность тормозов колес, и/или механизмами реверса тяги, при этом тормоза колес управляются системой, способной учитывать команды, приходящие от пилота или от автоматического устройства. Для торможения воздушного судна на земле пилот имеет две педали, установленные на рычаге управления рулем направления и соответственно связанные с тормозами колес, расположенных по каждую сторону от продольной оси воздушного судна: поэтому правой педалью можно управлять тормозами, расположенными на правой стороне воздушного судна, а левой педалью можно управлять тормозами, расположенными на левой стороне. Если пилот оказывает различные тормозные воздействия на две тормозные педали, он создает дифференциальное торможение между группами колес, расположенными по ту и другую сторону от продольной оси воздушного судна, и это дифференциальное торможение создает для воздушного судна момент относительно вертикальной оси.
Управление воздушным судном на земле также может быть осуществлено с помощью такого дифференциального торможения. Таким образом, когда пилот воздушного судна захочет скорректировать поперечную составляющую траектории воздушного судна на земле, он может воздействовать на рычаг управления рулем направления для вовлечения в процесс руля направления и управляемой передней опоры шасси и/или воздействовать на тормозные педали для создания дифференциального торможения.
Однако следует отметить, что воздействие только на тормозные педали при определенных условиях, таких как сильный боковой ветер, отказы двигателей и подобное, будет недостаточным для компенсации поперечной составляющей траектории воздушного судна и приведет к уходу последнего с рулежной дорожки.
Далее, такая ситуация может возникнуть в случае отказа рычага управления рулем направления. А именно, в этом случае в распоряжении имеются только тормозные педали для управления поворотом воздушного судна во время пробега его по земле.
Настоящее изобретение имеет своей целью устранение этого недостатка и по возможности повышение вызывающего поворот момента, создаваемого относительно воздушного судна, при несимметричном воздействии только на тормозные педали.
С этой целью согласно изобретению предложен способ управления воздушным судном во время пробега его по земле, при этом указанное воздушное судно содержит:
- управляемую переднюю опору шасси;
- руль направления, расположенный сзади указанного воздушного судна;
- рычаг управления рулем направления в распоряжении пилота воздушного судна, делающий возможным направление комбинированной команды управления к указанной управляемой передней опоре шасси и к указанному рулю направления для управления указанным воздушным судном при сносе;
- по меньшей мере две опоры шасси, симметричных друг с другом относительно продольной вертикальной срединной плоскости воздушного судна, при этом колеса указанных опор шасси снабжены тормозами; и
- два элемента управления торможением в распоряжении указанного пилота, соответственно связанные с указанными опорами шасси, и при этом каждый из них формирует команду торможения для управления тормозами колес соответствующих опор шасси,
при этом:
- образуют разность между указанными командами торможения;
- указанную разность команд торможения преобразуют в дополнительную команду управления для указанного руля направления и для указанной управляемой передней опоры шасси; и
- указанную дополнительную команду управления направляют к указанному рулю направления и к указанной управляемой передней опоре шасси при соблюдении двойственного условия, такого, что:
- указанная разность команд торможения больше, чем первый порог; и
- указанная комбинированная команда управления, направляемая указанным рычагом управления рулем направления к указанному рулю направления и к указанной управляемой передней опоре шасси меньше, чем второй порог.
С помощью настоящего изобретения при отказе рычага управления рулем направления и двух его плеч, заблокированных вблизи нейтрального положения, путем дифференциального тормозного воздействия со стороны пилота можно будет осуществить поворот в соответствующее направление руля направления и управляемой передней опоры шасси, обеспечивая управление самолетом на земле по траектории. С другой стороны, если воздушное судно на земле подвергается воздействию сильного бокового ветра, вынуждающего пилота выдерживать траекторию воздушного судна с помощью рычага управления рулем направления и, возможно, с помощью дифференциального тормозного воздействия, то последнее не может оказывать дополнительного влияния на положение руля направления или на положение управляемой передней опоры шасси.
Имеется в виду, что максимальный ход каждого из указанных элементов управления торможением находится между нейтральным положением и положением максимального торможения, и, в частности, этот максимальный ход соответствует повороту указанных элементов управления торможением между значением угла поворота, равным нулю (при указанном нейтральном положении), и значением максимального угла поворота (при указанном положении максимального торможения).
Достигается преимущество, когда указанный первый порог соответствует части указанного максимального хода элементов управления торможением, находящейся между одной третью и двумя третями, и предпочтительно, чтобы он соответствовал по меньшей мере приблизительно половине указанного максимального хода, иначе говоря, в таком случае указанный первый порог равен половине значения указанного максимального угла поворота.
Согласно предпочтительной форме осуществления настоящего изобретения для учета указанного первого порога до указанного преобразования в дополнительную команду управления, предназначенную для руля направления, указанную разность команд торможения преобразуют в первую функцию, при этом полагают значение нулевым до указанного первого порога и повышают далее, предпочтительно линейно, от указанного первого порога до максимального значения, достигаемого при максимальном значении (равном значению максимального угла поворота) указанной разности команд торможения. Указанное максимальное значение указанной первой функции равно указанному максимальному значению указанной разности команд торможения.
До некоторой степени аналогично тому, как это было воспроизведено выше для указанных элементов управления торможением, максимальное угловое перемещение каждого из плеч рычага управления рулем направления находится между нейтральным положением (соответствующим нулевому углу поворота) и положением, соответствующим максимальному отклонению руля направления (соответствующему максимальному значению угла).
Предпочтительно, чтобы преобразование указанной разности команд торможения в дополнительную команду управления, предназначенную для руля направления, осуществлялось путем умножения указанной первой функции на коэффициент, равный отношению указанного максимального хода качалок рычага управления рулем направления к указанному максимальному ходу указанных элементов управления торможением.
Чтобы учесть указанный второй порог, указанную дополнительную команду управления, таким образом полученную, до сложения с указанной комбинированной командой управления подвергают ограничению, с помощью указанного второго порога ограничивающим область, за пределами которой указанная дополнительная команда управления равна нулю, а внутри которой указанная дополнительная команда управления имеет ограниченное влияние на указанный руль направления и на указанную управляемую переднюю опору шасси. Контур указанной области соответствует функции, которая равна нулю, когда указанная комбинированная команда управления равна указанному второму порогу, и которая равна указанному второму порогу, когда указанная комбинированная команда управления равна нулю, и изменяется линейно между этими значениями.
Указанный второй порог соответствует части, например двум третям, указанного максимального хода плеч рычага управления рулем направления.
В качестве меры предосторожности каждую из указанных команд торможения ограничивают до образования их разности. Аналогично этому предпочтительно, чтобы сумма указанной комбинированной команды управления и указанной ограниченной дополнительной команды управления подвергалась ограничению до подведения к указанному рулю направления и к указанной управляемой передней опоре шасси.
Кроме того, настоящее изобретение относится к устройству для управления воздушным судном во время пробега его по земле, при этом указанное воздушное судно содержит:
- управляемую переднюю опору шасси;
- руль направления, расположенный сзади указанного воздушного судна;
- рычаг управления рулем направления в распоряжении пилота воздушного судна, делающий возможным направление комбинированной команды управления к указанной управляемой передней опоре шасси и к указанному рулю направления для управления указанным воздушным судном при сносе;
- по меньшей мере две опоры шасси, симметричных друг с другом относительно продольной вертикальной срединной плоскости воздушного судна, при этом колеса указанных опор шасси снабжены тормозами; и
- два элемента управления торможением в распоряжении указанного пилота, соответственно связанных с указанными опорами шасси, и при этом каждый формирует команду торможения для управления тормозами колес соответствующей опоры шасси.
Согласно предпочтительному осуществлению устройство по изобретению характеризуется тем, что оно содержит:
- средство для образования разности между указанными командами торможения;
- функциональный генератор, преобразующий указанную разность в функцию, при этом ее значение полагается нулевым до первого порога и повышается далее от указанного первого порога до максимального значения, достигаемого при максимальном значении указанной разности команд торможения;
- средство для преобразования указанной функции в дополнительную команду управления для указанного руля направления и для указанной управляемой передней опоры шасси;
- ограничительное средство, способное ограничивать указанную дополнительную команду управления и с помощью второго порога ограничивающее область, за пределами которой указанная дополнительная команда управления равна нулю, а внутри которой действие указанной дополнительной команды управления имеет ограниченное влияние на указанный руль направления и на указанную управляемую переднюю опору шасси;
- средство для образования суммы указанной комбинированной команды управления и указанной дополнительной команды управления, ограниченной вторым функциональным генератором; и
- средства для подведения указанной суммы к указанному рулю направления и к указанной управляемой передней опоре шасси.
Фигурами чертежа будет пояснен характер действий, посредством которых может быть осуществлено изобретение. На этих чертежах одинаковыми позициями обозначены аналогичные элементы.
На чертежах показано:
Фиг.1 - вид спереди широкофюзеляжного гражданского самолета, к которому можно применить настоящее изобретение;
Фиг.2 - вид сбоку самолета по фиг.1;
Фиг.3 - местный вид сверху гражданского самолета по фиг.1 и 2, при этом изображен только контур указанного самолета с тем, чтобы показать расположение различных колесных блоков с их тормозным устройством и устройством для управления поворотом при разбеге;
Фиг.4 - структурная схема устройства для управления курсом при разбеге согласно примеру осуществления в соответствии с настоящим изобретением; и
Фиг.5 и 6 - диаграммы, схематически и частично иллюстрирующие работу примера осуществления по фиг.4.
Самолет 1, схематически показанный на фиг.1 и 2 и осуществляющий руление по земле S, содержит две пары колесных блоков 2G, 2D и 3G, 3D соответственно, а также управляемую переднюю опору 4 шасси, расположенную вблизи носа самолета 1 (обычно называемую носовым колесом).
Два колесных блока 2G и 2D, расположенных соответственно на левой стороне и на правой стороне самолета 1, являются симметричными друг с другом относительно продольной вертикальной срединной плоскости V-V самолета 1. Аналогичным образом два колесных блока 3G и 3D, также расположенных на левой стороне и на правой стороне самолета 1, являются симметричными друг с другом относительно указанной плоскости V-V. С другой стороны, два колесных блока 2G и 2D находятся ближе к указанной плоскости V-V (и, следовательно, друг к другу), чем колесные блоки 3G и 3D.
Каждое колесо 5 ближних блоков 2G и 2D снабжено индивидуальным тормозом (схематически показанным позицией 9 на фиг.4), и управление индивидуальными тормозами каждого из блоков 2G или 2D осуществляется управляющим устройством 6G или 6D соответственно.
Аналогично этому каждое колесо 7 дальних блоков 3G или 3D снабжено индивидуальным тормозом (схематически показанным позицией 10 на фиг.4), и управление индивидуальными тормозами каждого из блоков 3G или 3D осуществляется управляющим устройством 8G или 8D соответственно.
Сами управляющие устройства 6G, 6D, 8G и 8D управляются устройством 11 распределения торможения, принимающим соответственно по линиям 15G и 15D команды для торможения слева FG и справа FD с двух измерительных преобразователей 14G и 14D соответственно, связанных с двумя элементами: левым 12G и правым 12D, находящимися в распоряжении пилота.
Известным образом команда FG торможения слева используется главным образом для торможения колес 7 левого далекого блока 3G и может быть использована для торможения колес 5 левого близкого блока 2G. Аналогично этому команда FD торможения справа используется главным образом для торможения колес 7 правого дальнего блока 3D и может быть использована для торможения колес 5 правого ближнего блока 2D.
Предпочтительно, чтобы другие элементы торможения (не показано) были предоставлены в распоряжение второго пилота самолета 1.
Как схематически показано на фиг.4, указанные элементы 12G и 12D торможения могут состоять из поворотных педалей, соединенных шарнирно с соответствующими свободными концами плеч 13G и 13D рычага управления рулем направления самолета 1.
Когда пилот своей левой (или правой) ногой поворачивает левую педаль 12G (или правую педаль 12D), поворот указанной педали обнаруживается левым измерительным преобразователем 14G (или правым измерительным преобразователем 14D), который формирует соответствующую команду FG торможения слева (или команду FD торможения справа), направляемую в указанное устройство 11 распределения торможения. Угол α поворота каждой педали 12G или 12D находится между 0 (педаль в исходном положении) и α mах (при максимальном повороте), и соответствующая команда FG или FD торможения зависит от значения указанного угла α поворота.
Рычаг 13 управления рулем направления предназначен для управления известным образом рулем 16 направления самолета 1 (см. фиг.2), когда самолет осуществляет руление по земле, и ориентации управляемой передней опоры 4 шасси самолета 1. С этой целью два измерительных преобразователя 17G и 17D связаны соответственно с двумя плечами 13G и 13D рычага 13 управления рулем направления для формирования комбинированных команд управления поворотом влево LGC и вправо LDC соответственно. Угол β поворота каждого плеча 13G или 13D рычага 13 управления рулем направления находится между 0 (плечо в исходном положении) и β max (при максимальном повороте), а комбинированные команды LGC и LDC управления подводятся к указанному рулю 16 направления и к указанной управляемой передней опоре 4 шасси посредством приводных устройств 18 и 19 соответственно.
В соответствии с настоящим изобретением команды LGC и LDC управления поворотом, исходящие от измерительных преобразователей 17G и 17D соответственно, а также команды FG и FD торможения, исходящие от измерительных преобразователей 14G и 14D соответственно, передаются в устройство 20 обработки, способное формировать дополнительную команду D2l для руля 16 направления и для управляемой передней опоры 4 шасси в том случае, когда дифференциальное торможение является значительным, тогда как команда LGC или LDC имеет небольшой уровень.
Устройство 20 обработки содержит блок 21 вычитания, на который с использованием линий 15G и 15D подаются команды FG и FD торможения через соответствующие ограничители 22G и 22D, предназначенные для полного исключения ввода в блок 21 вычитания входных данных с ошибками. Например, при наличии ограничителей 22G и 22D подразумевается, что FG и FD ограничиваются между 0 и α max.
Поэтому на выходе блока 21 вычитания формируется разностная команда D1 торможения, считающаяся, например, положительной, если FG больше FD, и отрицательной в противоположном случае. Разностная команда D1 торможения направляется в функциональный генератор 23, способный преобразовывать разностную команду D1 торможения в функцию F(D1), пример которой показан на фиг.5. В этом примере функция F(D1) равна нулю, когда перемещение педалей 12G и 12D меньше половины (α max/2) максимального хода, и является линейно возрастающей функцией D1 между указанной половиной α mах/2 максимального хода и максимальным ходом α mах. В случае, когда D1 равна α mах, F(D1) также соответствует α mах.
Следовательно, функция F(D1) ограничивается при разностных командах торможения высокого уровня выше порога α mах/2. Она передается на преобразователь 24, способный преобразовывать ее в команду для руля 16 направления. Например, в указанном преобразователе 24 осуществляется умножение функции F(D1) на коэффициент К, равный отношению максимального отклонения β mах плеч рычага 13 управления рулем направления к максимальному повороту α mах тормозных педалей 12G и 12D.
Поэтому на выходе преобразователя 24 получается дополнительная команда D2 отклонения для руля 16 направления и управляемой передней опоры 4 шасси. Эта дополнительная команда D2 отклонения направляется на ограничитель 25, который принимает команды LGC и LDC управления, исходящие от измерительных преобразователей 17G и 17D, связанных с рычагом 13 управления рулем направления, и формирует функцию LimD2, способную ограничивать область действия команды D2 до команд небольшого уровня для отклонения руля направления и ограничивать влияние тормозных педалей 12G и 12D на руль 16 направления и на управляемую переднюю опору 4 шасси.
На фиг.6 представлен пример области 26 ограничения, формируемой ограничителем 25. Область 26 ограничена контуром 27, удовлетворяющим функции, которая равна нулю, когда комбинированная команда LGC или LGD управления равна порогу 2·β max/3, равному двум третям максимального значения β mах угла β отклонения плеч 13G и 13D рычага 13 управления рулем направления, и которая равна указанному порогу 2·βmах/3, когда указанная комбинированная команда управления равна нулю. Между этими двумя положениями изменение контура 27 может быть линейным.
За пределами области 2 6 ограничения ограничитель 25 приводит к нулю дополнительную команду D2 отклонения, тогда как внутри указанной области последняя изменяется обратно пропорционально комбинированной команде LGC или LGD управления.
Таким образом, на выходе ограничителя 25 формируется ограниченная дополнительная команда D2l отклонения, которая в сумматоре 28 добавляется к соответствующей комбинированной команде LGC или LGD управления.
Полученная таким образом сумма направляется на ограничитель 29, осуществляющий ее ограничение, например, областью -β mах, +β mах, после чего она передается на приводные устройства 18 и 19 руля 16 направления и управляемой передней опоры 4 шасси.
При желании команда D2l также может быть направлена к аэродинамическим поверхностям самолета 1 (например, к интерцепторам, не показано), способным при пробеге по земле повысить момент относительно вертикальной оси.
Поэтому при сильном боковом ветре пилот самолета 1 выдерживает траекторию движения самолета 1 рычагом 13 управления рулем направления и, если необходимо, дифференциальным тормозным воздействием на педали 12G, 12D. При сильно отклоненном рычаге 13 управления рулем направления дифференциальное торможение не оказывает дополнительного влияния на положение руля 16 направления или на управляемую переднюю опору 4 шасси.
При тех же самых условиях, если плечи 13G и 13D заблокированы, они близки к нейтральному положению, так что дифференциальное тормозное воздействие оказывает влияние на тормоза и на положения руля 16 направления и управляемой передней опоры 4 шасси, вследствие чего обеспечивается возможность управления траекторией движения самолета 1.
Следует отметить, что с помощью настоящего изобретения дополнительная команда D2l ограничивается непрерывно и постепенно в зависимости от команды LGC или LGD, источником которой служит рычаг 13 управления рулем направления, таким образом, что дополнительная команда D2l фактически равна нулю, когда команда LGC или LGD достигает определенного порога (2·βmах/3), всегда предоставляя приоритет команде LGC или LGD.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления самолётом в режиме системы автоматического управления "Посадка" | 2024 |
|
RU2830919C1 |
| Способ и система предотвращения бокового увода летательного аппарата с взлётно-посадочной полосы | 2019 |
|
RU2727225C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ФОРМИРОВАНИЯ ВСПОМОГАТЕЛЬНЫХ СИГНАЛОВ НА НАЗЕМНОМ УЧАСТКЕ ДВИЖЕНИЯ САМОЛЕТА | 2019 |
|
RU2733666C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ТОРМОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЕГО ДВИЖЕНИИ ПО ЗЕМЛЕ | 2005 |
|
RU2341409C1 |
| СИСТЕМА ПОДУШЕК БЕЗОПАСНОСТИ ДЛЯ ВОЗДУШНЫХ СУДОВ | 2008 |
|
RU2448873C2 |
| СВЕРХЛЕГКИЙ САМОЛЕТ | 2005 |
|
RU2336200C2 |
| СПОСОБ И УСТРОЙСТВО ПОПЕРЕЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ, ОСУЩЕСТВЛЯЮЩИМ РУЛЕНИЕ | 2009 |
|
RU2435190C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| СПОСОБ ИЗМЕНЕНИЯ РЕЖИМА ПОЛЕТА ВОЗДУШНОГО СУДНА В ЗАПРЕТНОЙ ЗОНЕ | 2010 |
|
RU2445579C2 |
Изобретение относится к способу и устройству для управления воздушным судном во время пробега его по земле. Способ заключается в образовании разности между командами торможения слева и справа. Разность команд торможения преобразуют в дополнительную команду управления для руля направления и для управляемой передней опоры шасси. Дополнительную команду управления направляют к рулю направления и к управляемой передней опоре шасси при соблюдении двойственного условия, такого, что разность команд торможения больше, чем первый порог и комбинированная команда управления, направляемая рычагом управления рулем направления к рулю направления и к управляемой передней опоре шасси, меньше, чем второй порог. Устройство содержит управляемую переднюю опору шасси, руль направления, рычаг управления рулем направления, две опоры шасси, симметричных друг с другом относительно продольной вертикальной срединной плоскости воздушного судна, при этом колеса опор шасси снабжены тормозами, два элемента управления торможением, средство для образования разности между командами торможения, функциональный генератор, средство для преобразования функции в дополнительную команду управления для руля направления и для управляемой передней опоры шасси, ограничительное средство, средство для образования суммы комбинированной команды управления и дополнительной команды управления, ограниченной ограничительным средством, средства для подведения суммы к рулю направления и к управляемой передней опоре шасси. Технический результат заключается в повышении вызывающего поворот момента. 2 н. и 13 з.п. ф-лы, 6 ил.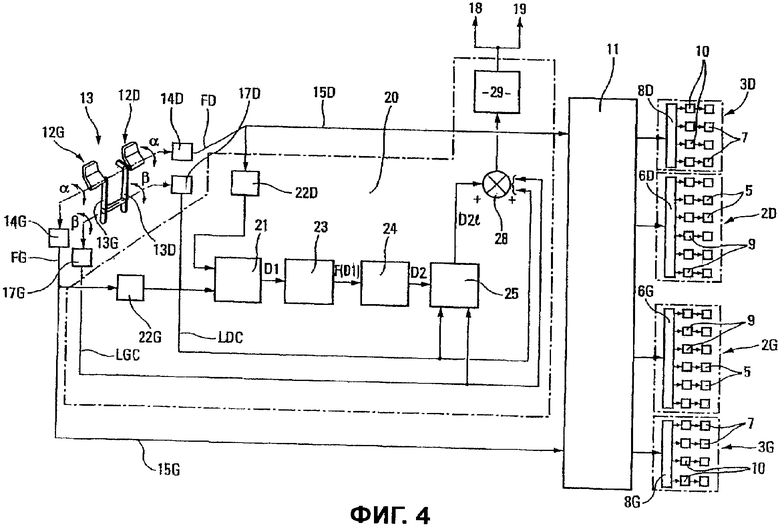
1. Способ управления воздушным судном (1) во время пробега его по земле (S), при этом указанное воздушное судно содержит:
управляемую переднюю опору (4) шасси;
руль (16) направления, расположенный сзади указанного воздушного судна (1);
рычаг (13) управления рулем направления в распоряжении пилота воздушного судна, делающий возможным направление комбинированной команды управления к указанной управляемой передней опоре (4) шасси и к указанному рулю (16) направления для управления указанным воздушным судном при повороте;
по меньшей мере две опоры (2G, 3G - 2D, 3D) шасси, симметричных друг с другом относительно продольной вертикальной срединной плоскости (V-V) воздушного судна, при этом колеса (5, 7) указанных опор шасси снабжены тормозами (9, 10); и
два элемента (12G-12D) управления торможением в распоряжении указанного пилота, соответственно связанных с указанными опорами шасси, и при этом каждый из них формирует команду (FG, FD) торможения для управления тормозами колес соответствующих опор шасси, в котором:
образуют разность (D1) между указанными командами (FG, FD) торможения;
указанную разность (D1) команд торможения преобразуют в дополнительную команду (D2) управления для указанного руля (16) направления и для указанной управляемой передней опоры (4) шасси; и
указанную дополнительную команду (D2) управления направляют к указанному рулю (16) направления и к указанной управляемой передней опоре (4) шасси при соблюдении двойственного условия, такого что:
указанная разность (D1) команд торможения больше, чем первый порог; и
указанная комбинированная команда управления, направляемая указанным рычагом управления рулем направления к указанному рулю направления и к указанной управляемой передней опоре шасси, меньше, чем второй порог.
2. Способ по п.1, в котором максимальный ход каждого из указанных элементов (12G, 12D) торможения находится между нейтральным положением и положением максимального торможения, в котором указанный первый порог соответствует части указанного максимального хода, находящейся между одной третью и двумя третями.
3. Способ по п.2, в котором указанный первый порог соответствует по меньшей мере приблизительно половине указанного максимального хода указанных элементов (12G, 12D) торможения.
4. Способ по п.2, в котором до указанного преобразования в дополнительную команду управления указанную разность команд торможения преобразуют в первую функцию (F(D1)), при этом полагают значение нулевым до указанного первого порога и повышают далее от указанного первого порога до максимального значения, достигаемого при максимальном значении указанной разности команд торможения.
5. Способ по п.4, в котором указанную первую функцию повышают линейно между указанным первым порогом и указанным максимальным значением указанной разности команд управления.
6. Способ по п.4, в котором указанное максимальное значение указанной функции по меньшей мере приблизительно равно указанному максимальному значению указанной разности команд торможения.
7. Способ по п.4, в котором преобразование разности команд торможения в дополнительную команду управления для руля (16) направления получают путем умножения указанной первой функции на коэффициент, равный отношению указанного максимального хода плеч рычага управления рулем направления к указанному максимальному ходу указанных элементов управления торможением.
8. Способ по п.7, в котором указанную дополнительную команду управления до сложения с указанной комбинированной командой управления подвергают ограничению, с помощью указанного второго порога ограничивающим область (26), за пределами которой указанная дополнительная команда управления равна нулю, а внутри которой действие указанной дополнительной команды управления имеет ограниченное влияние на указанный руль (16) направления и на указанную управляемую переднюю опору (4) шасси.
9. Способ по п.8, в котором контур (27) указанной области (26) соответствует функции, которая равна нулю, когда указанная комбинированная команда управления равна указанному второму порогу, и которая равна указанному второму порогу, когда указанная комбинированная команда управления равна нулю.
10. Способ по п.9, в котором указанная функция изменяется по меньшей мере приблизительно линейно между нулевым значением и значением ее, равным указанному второму порогу.
11. Способ по п.8, в котором указанный второй порог соответствует части максимального хода плеч рычага (13) управления рулем направления.
12. Способ по п.11, в котором указанный второй порог соответствует двум третям максимального хода плеч рычага (13) управления рулем направления.
13. Способ по п.1, в котором каждую из указанных команд торможения подвергают ограничению до образования их разности.
14. Способ по п.8, в котором сумму указанной комбинированной команды управления и указанной ограниченной дополнительной команды управления подвергают ограничению до подведения к указанному рулю направления и к указанной управляемой передней опоре шасси.
15. Устройство для управления воздушным судном (1) во время пробега его по земле (S), при этом указанное воздушное судно содержит:
управляемую переднюю опору (4) шасси;
руль (16) направления, расположенный сзади указанного воздушного судна (1);
рычаг (13) управления рулем направления в распоряжении пилота воздушного судна, делающий возможным направление комбинированной команды управления к указанной управляемой передней опоре (4) шасси и к указанному рулю (16) направления для управления указанным воздушным судном при повороте;
по меньшей мере две опоры (2G, 3G; 2D, 3D) шасси, симметричных друг с другом относительно продольной вертикальной срединной плоскости (V-V) воздушного судна, при этом колеса (5, 7) указанных опор шасси снабжены тормозами (9, 10); и
два элемента (12G, 12D) управления торможением в распоряжении указанного пилота, соответственно связанных с указанными опорами шасси, и при этом каждый формирует команду торможения для управления тормозами колес соответствующей опоры шасси,
при этом оно содержит:
средство (21) для образования разности (D1) между указанными командами торможения;
функциональный генератор (23), преобразующий указанную разность (D1) в функцию (F(D1)), при этом ее значение полагается нулевым до первого порога и повышается далее от указанного первого порога до максимального значения, достигаемого при максимальном значении указанной разности (D1) команд торможения;
средство (24) для преобразования указанной функции (F(D1)) в дополнительную команду (D2) управления для указанного руля (16) направления и для указанной управляемой передней опоры (4) шасси;
ограничительное средство (25), способное ограничивать указанную дополнительную команду (D2) управления и с помощью второго порога ограничивающее область (26), за пределами которой указанная дополнительная команда управления равна нулю, а внутри которой действие указанной дополнительной команды управления имеет ограниченное влияние на указанный руль направления и на указанную управляемую переднюю опору шасси;
средство (28) для образования суммы указанной комбинированной команды управления и указанной дополнительной команды (D2l) управления, ограниченной указанным ограничительным средством (25); и
средства (18, 19) для подведения указанной суммы к указанному рулю (16) направления и к указанной управляемой передней опоре (4) шасси.
| US 4008868 А, 22.02.1977 | |||
| US 2003125848 А1, 03.07.2003 | |||
| СИСТЕМА УПРАВЛЕНИЯ ПЕРЕДНЕЙ ОПОРОЙ ШАССИ САМОЛЕТА | 1992 |
|
RU2070140C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕДНЕЙ СТОЙКОЙ ШАССИСАМОЛЕТА | 0 |
|
SU286510A1 |

