Изобретение относится к области радиотехники, в частности к радиоэлектронным системам измерения координат, и может быть использовано в бортовых и наземных радиоэлектронных системах сопровождения (РЭСС).
Известен способ определения дальности до летательного аппарата (ЛА) в режиме молчания радиолокационной станции (РЛС) (см. Антипов В.Н., Исаев С.А., Лавров А.А., Меркулов В.И. Многофункциональные радиоэлектронные комплексы истребителей / под ред. проф. Г.С.Кондратенкова. - М.: Воениздат, 1994. - 213 с.).
Сущность данного способа состоит в следующем. Дальность до ЛА в k-й момент времени Дk определяют через дальность до ЛА в (k-1)-й момент времени Дk-1 и через скорость его сближения с РЭСС в (k-1)-й момент времени Vk-1 в предположении, что данная скорость постоянна:


где Т - интервал дискретизации; значения Д0 и V0 определяют при работе РЛС в активном режиме.
Известен способ определения дальности до маневренного ЛА в режиме молчания РЛС (см. Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей: пер. с англ. - М.: Радио и связь, 1993. - 320 с.).
Сущность данного способа состоит в следующем. Дальность до ЛА в k-й момент времени Дk определяют через дальность до ЛА в (k-1)-й момент времени Дk-1, через скорость и ускорение его сближения с РЭСС в (k-1)-й момент времени Vk-1 и ak-1, соответственно, в предположении, что данное ускорение постоянно:



где Т - интервал дискретизации; значения Д0, V0 и а0 определяют при работе РЛС в активном режиме.
Известен также способ определения дальности до маневренного ЛА в режиме молчания РЛС (см. Зингер Р. Оценка характеристик оптимального фильтра для слежения за пилотируемой целью // Зарубежная радиоэлектроника. - 1971. - №8. - С.40-57), сущность которого состоит в том, что дальность до ЛА в k-й момент времени Дk определяют через дальность до ЛА в (k-1)-й момент времени Дk-1, через скорость и ускорение его сближения с РЭСС в (k-1)-й момент времени Vk-1 и ak-1, соответственно, в предположении, что данное ускорение описывается экспоненциально коррелированным процессом:



где Т - интервал дискретизации; α - величина, характеризующая скорость изменения ускорения; nak - гауссовский шум с дисперсией  и математическим ожиданием ma=0 м/с2; σa - среднеквадратическое отклонение (СКО) ускорения; значения Д0, V0 и а0 определяют при работе РЛС в активном режиме; принимают, что na0=ma.
и математическим ожиданием ma=0 м/с2; σa - среднеквадратическое отклонение (СКО) ускорения; значения Д0, V0 и а0 определяют при работе РЛС в активном режиме; принимают, что na0=ma.
Общими недостатками рассмотренных способов являются: низкая точность определения дальности до ЛА вследствие несоответствия принятой модели изменения скорости или ускорения сближения ЛА с РЭСС реальной динамике скорости или ускорения; отсутствие учета и использования дополнительной информации о движении ЛА от устройств и систем, работающих в пассивном режиме, при определении дальности до ЛА.
Наиболее близким по своей сущности к предлагаемому способу является способ определения дальности до маневренного ЛА в режиме молчания РЛС, описанный в работе (Перспективные методы обработки информации: Монография / Горев П.Г. [и др.]; под ред. проф. П.Г.Горева. - Тамбов; М.; СПб; Баку; Вена: Изд-во «Нобелистика», 204. - 478 с.) и принятый за прототип.
Сущность способа, принятого за прототип, состоит в том, что дальность до ЛА в k-й момент времени Дk определяют через дальность до ЛА в (k-1)-й момент времени Дk-1, через скорость и ускорение его сближения с РЭСС в (k-1)-й момент времени Vk-1 и аk-1, соответственно. При этом, ускорение в k-й момент времени ak вычисляется на основе информации о пространственной ориентации ЛА в (k-1)-й момент времени - об углах тангажа ϑk-1, рыскания ψk-1 и скоростях их изменения ωθk-1 и ωψk-1, соответственно, поступающей от телевизионной системы (ТС); информации об углах пеленга в горизонтальной плоскости εгk-1, вертикальной плоскости εвk-1 и скоростях их изменения ωгk-1 и ωвk-1, соответственно, в (k-1)-й момент времени, поступающей от теплопеленгатора (ТП); и информации о значении собственного ускорения носителя РЭСС в (k-1)-й момент времени аck-1, поступающей от системы автономных датчиков (САД):

где 

Т - интервал дискретизации; значения Д0, V0 и а0 определяют при работе РЛС в активном режиме.
Недостатком способа, принятого за прототип, является невысокая точность определения дальности до ЛА вследствие несоответствия принятой модели прямолинейного движения ЛА относительно РЭСС реальному криволинейному движению маневренного ЛА относительно РЭСС.
Техническим результатом предлагаемого способа является повышение точности определения дальности до маневренного ЛА в режиме молчания РЛС на основе использования нерадиолокационной информации, поступающей от ТС, ТП и САД, в модели криволинейного движения маневренного ЛА относительно РЭСС.
Сущность предлагаемого способа заключается в том, что дальность до маневренного ЛА в k-й момент времени Дk определяют через дальность до ЛА в (k-1)-й момент времени Дk-1, через радиус окружности, по дуге которой движется ЛА относительно РЭСС в (k-1)-й момент времени, rk-1, изменение значения которого описывается экспоненциально коррелированным процессом; через угловую скорость движения ЛА относительно РЭСС в k-й момент времени ωk; и через расстояние Дн k в k-й момент времени, преодолеваемое носителем РЭСС за интервал дискретизации Т:


где µ - величина, обратная постоянной времени маневра ЛА; nrk - гауссовский шум с дисперсией  и математическим ожиданием mr; σr - СКО радиуса окружности, по дуге которой движется ЛА относительно РЭСС; значение До определяют при работе РЛС в активном режиме; принимают, что r0=0 м и nr0=mr.
и математическим ожиданием mr; σr - СКО радиуса окружности, по дуге которой движется ЛА относительно РЭСС; значение До определяют при работе РЛС в активном режиме; принимают, что r0=0 м и nr0=mr.
Расстояние Дн k в k-й момент времени, преодолеваемое носителем РЭСС за интервал дискретизации Т, определяется выражением:

где Vн k - значение линейной скорости носителя РЭСС в k-й момент времени; θн k - угол наклона траектории носителя РЭСС в k-й момент времени; φн k -угол поворота траектории носителя РЭСС в k-й момент времени; εвk и εrk - углы пеленга в вертикальной и горизонтальной плоскости, соответственно, в k-й момент времени.
Информация о линейной скорости Vн k, угле наклона траектории θн k и угле поворота траектории φн k носителя РЭСС в k-й момент времени поступает от САД, а информация об углах пеленга в вертикальной плоскости εвk и горизонтальной плоскости εrk в k-й момент времени - от ТП.
На основе экспериментальных данных для маневренного ЛА типа "истребитель" было определено, что µ=0,0935 с-1; σr=197 м; mr=269 м.
Угловая скорость движения маневренного ЛА относительно РЭСС в k-й момент времени ωk определяется выражением:
где пространственный угол поворота траектории ЛА относительно РЭСС в k-й момент времени κk определяется углами пространственной ориентации ЛА относительно РЭСС - углом  , образованном продольной осью ЛА и проекцией продольной оси ЛА на плоскость ОлХлZл лучевой системы координат носителя РЭСС ОлХлYлZл, в k-й момент времени и углом
, образованном продольной осью ЛА и проекцией продольной оси ЛА на плоскость ОлХлZл лучевой системы координат носителя РЭСС ОлХлYлZл, в k-й момент времени и углом  в (k-1)-й момент времени; углом
в (k-1)-й момент времени; углом  , образованным осью ОлХл лучевой системы координат носителя РЭСС ОлХлYлZл и проекцией продольной оси ЛА на плоскость ОлХлZл лучевой системы координат носителя РЭСС OлXлYлZл, в k-й момент времени и углом
, образованным осью ОлХл лучевой системы координат носителя РЭСС ОлХлYлZл и проекцией продольной оси ЛА на плоскость ОлХлZл лучевой системы координат носителя РЭСС OлXлYлZл, в k-й момент времени и углом  в (k-1)-й момент времени, информация о которых поступает от ТС, и вычисляется в соответствии с выражением:
в (k-1)-й момент времени, информация о которых поступает от ТС, и вычисляется в соответствии с выражением:

при допущении, что продольная ось ЛА и вектор его линейной скорости в k-й момент времени  совпадают, то есть углы атаки и скольжения ЛА в k-й момент времени: αk=0 и βk=0, соответственно.
совпадают, то есть углы атаки и скольжения ЛА в k-й момент времени: αk=0 и βk=0, соответственно.
Результаты проведенных исследований показали, что для большинства типов эксплуатируемых в настоящее время ЛА данное допущение не приводит к существенным ошибкам и применимо при решении задачи определения дальности до ЛА.
Геометрический смысл пространственного угла поворота траектории ЛА относительно РЭСС в k-й момент времени κk пояснен на фигуре 1.
Опираясь на результаты моделирования на электронно-вычислительной машине, можно утверждать, что если в (k-1)-й момент времени измеренный ТС угол  то второе слагаемое выражения (12)
то второе слагаемое выражения (12)  имеет знак "плюс", и дальность до ЛА в k-й момент време-ни Дk увеличится; если в (k-1)-й момент времени угол
имеет знак "плюс", и дальность до ЛА в k-й момент време-ни Дk увеличится; если в (k-1)-й момент времени угол  то второе слагаемое выражения (12)
то второе слагаемое выражения (12)  имеет знак "минус", и дальность до ЛА в k-й момент времени Дk уменьшится.
имеет знак "минус", и дальность до ЛА в k-й момент времени Дk уменьшится.
На фигуре 2 представлена логическая схема алгоритма функционирования устройства определения дальности до маневренного ЛА в режиме молчания РЛС на основе использования информации о его пространственной ориентации для реализации предложенного способа.
Логическая схема состоит из блока «Данные» I; блока «Подготовка» II; блоков «Процесс» III, IV, V, VII, VIII; блока «Решение» VI; блока «Запоминаемые данные» IX; блоков «Оперативное запоминающее устройство» X, XI.
В блоке I устанавливаются исходные значения параметров µ, Т, σr, mr, Д0, r0 и nr0. Вычисление выражений, определяющих значения Дk, rk и nrk в k-й момент времени, в ветви алгоритма, включающей блоки III, VI, VII, VIII, и блоках IV, V производится параллельно. В зависимости от результата выполнения условия блок VI осуществляет логический выбор блока VII или блока VIII. Результаты вычислений блоков IV, V, VII (или VIII) запоминаются (блок IX) для использования на следующем шаге вычислений в (k+1)-й момент времени (блок II). Вычисленное в блоке VII (или VIII) значение Дk в k-й момент времени запоминается в оперативном запоминающем устройстве (блок X). Функционирование блоков II, III, IV, V, VI, VII, VIII, IX осуществляется до момента сброса сопровождения (блок VIII).
Результаты проведенных исследований подтверждают целесообразность применения на практике предлагаемого способа определения дальности до маневренного ЛА в режиме молчания РЛС по доступной в данном режиме информации, поступающей от ТС, ТП и САД.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО МАНЕВРЕННОГО ЛЕТАТЕЛЬНОГО АППАРАТА В РЕЖИМЕ РАДИОМОЛЧАНИЯ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ПАРАМЕТРОВ ЕГО КРИВОЛИНЕЙНОГО ДВИЖЕНИЯ | 2007 |
|
RU2358287C1 |
| СПОСОБ АДАПТАЦИИ СИСТЕМЫ СОПРОВОЖДЕНИЯ МАНЕВРЕННОЙ ВОЗДУШНОЙ ЦЕЛИ ПО ДАЛЬНОСТИ НА ОСНОВЕ ИНФОРМАЦИИ ОТ ИЗМЕРИТЕЛЕЙ РАЗЛИЧНОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ | 2005 |
|
RU2303797C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ СБЛИЖЕНИЯ МАНЕВРЕННОГО ЛЕТАТЕЛЬНОГО АППАРАТА С РАДИОЭЛЕКТРОННОЙ СИСТЕМОЙ СОПРОВОЖДЕНИЯ В РЕЖИМЕ РАДИОМОЛЧАНИЯ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ПАРАМЕТРОВ ЕГО КРИВОЛИНЕЙНОГО ДВИЖЕНИЯ | 2007 |
|
RU2366972C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛИНЕЙНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ НЕРАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2489730C2 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2021 |
|
RU2773672C1 |
| Способ наведения летательного аппарата на наземные цели с помощью радиолокатора с синтезированием апертуры антенны | 2023 |
|
RU2824690C1 |
| СИСТЕМА ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ СКРЫТНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В ЗОНЕ ОБНАРУЖЕНИЯ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС | 2017 |
|
RU2686802C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И СКОРОСТИ СБЛИЖЕНИЯ С НИМИ В ОДНОПОЗИЦИОННЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2002 |
|
RU2232402C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА С ПРОГНОЗОМ ПРОПАДАНИЯ ЦЕЛЕЙ В ЗОНАХ ДОПЛЕРОВСКОЙ РЕЗЕКЦИИ | 2009 |
|
RU2408030C2 |
Изобретение может быть использовано в бортовых и наземных радиоэлектронных системах сопровождения. Достигаемым техническим результатом изобретения является повышение точности определения дальности до маневренного летательного аппарата в режиме молчания радиолокационной станции на основе использования доступной в данном режиме информации, поступающей от телевизионной системы, теплопеленгатора и системы автономных датчиков. Сущность изобретения заключается в том, что для определения дальности до маневренного летательного аппарата используется радиус окружности, по дуге которой движется летательный аппарат относительно радиоэлектронной системы сопровождения, изменение значения которого описывается экспоненциально коррелированным процессом; угловая скорость движения летательного аппарата относительно радиоэлектронной системы сопровождения, являющаяся скоростью изменения пространственного угла поворота траектории летательного аппарата, определяемого на основе информации о пространственной ориентации летательного аппарата относительно радиоэлектронной системы сопровождения, поступающей от телевизионной системы; и расстояние, преодолеваемое носителем радиоэлектронной системы сопровождения за интервал дискретизации, значение которого вычисляется на основе информации, поступающей от теплопеленгатора и системы автономных датчиков. 2 ил.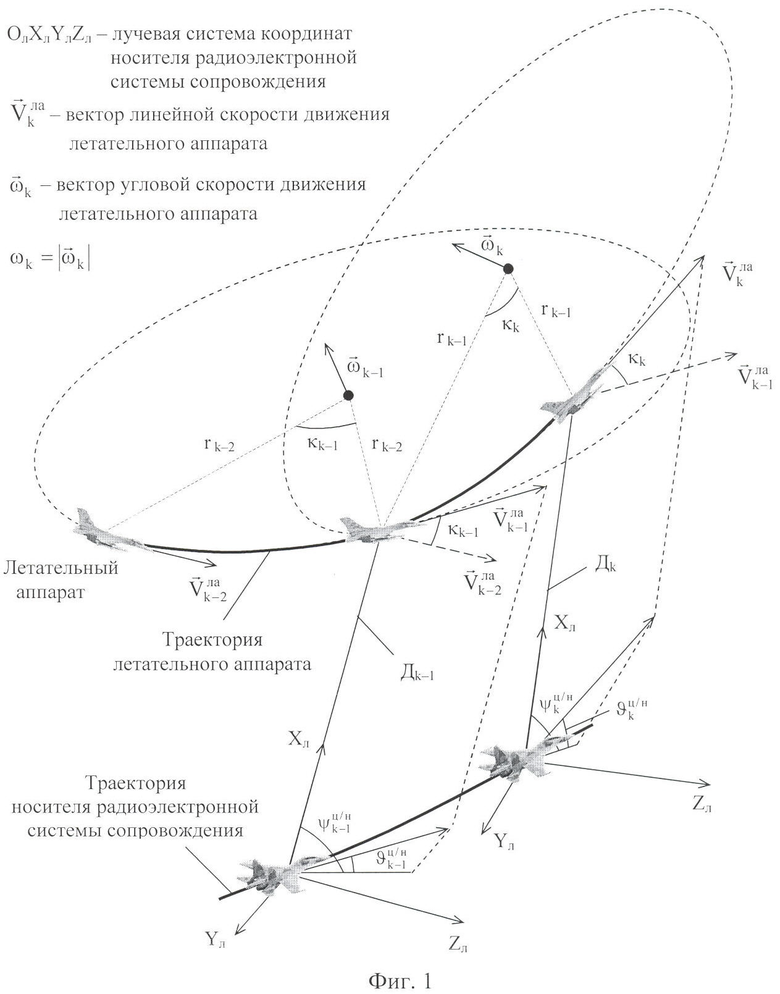
Способ определения дальности до маневренного летательного аппарата в режиме молчания радиолокационной станции на основе использования нерадиолокационной информации, заключающийся в том, что дальность до летательного аппарата в k-й момент времени Дk определяют через дальность до летательного аппарата в (k-1)-й момент времени Дk-1, через радиус окружности, по дуге которой движется летательный аппарат относительно радиоэлектронной системы сопровождения в (k-1)-й момент времени, rk-1, изменение значения которого описывается экспоненциально коррелированным процессом, через угловую скорость движения летательного аппарата относительно радиоэлектронной системы сопровождения в k-й момент времени ωk; и через расстояние  в k-й момент времени, преодолеваемое носителем радиоэлектронной системы сопровождения за интервал дискретизации Т:
в k-й момент времени, преодолеваемое носителем радиоэлектронной системы сопровождения за интервал дискретизации Т:

где 
µ=0,0935 с-1 - величина, обратная постоянной времени маневра летательного аппарата; nrk - гауссовский шум с дисперсией 2·µ·σr 2 и математическим ожиданием mr=269 м; σr=197 м - среднеквадратическое отклонение радиуса окружности, по дуге которой движется летательный аппарат относительно радиоэлектронной системы сопровождения; значение Д0 определяют при работе радиолокационной станции в активном режиме; принимают, что r0=0 м и nr0=mr; отличающийся тем, что определение дальности до маневренного летательного аппарата осуществляется с использованием информации о его пространственной ориентации, применяемой при вычислении угловой скорости движения летательного аппарата относительно радиоэлектронной системы сопровождения в k-й момент времени ωk:
где Kk - пространственный угол поворота траектории летательного аппарата относительно радиоэлектронной системы сопровождения в k-й момент времени, определяемый углами пространственной ориентации летательного аппарата относительно радиоэлектронной системы сопровождения - углом  образованным продольной осью летательного аппарата и проекцией продольной оси летательного аппарата на плоскость ОлХлZл лучевой системы координат носителя радиоэлектронной системы сопровождения ОлХлYлZл, в k-й момент времени и углом
образованным продольной осью летательного аппарата и проекцией продольной оси летательного аппарата на плоскость ОлХлZл лучевой системы координат носителя радиоэлектронной системы сопровождения ОлХлYлZл, в k-й момент времени и углом  в (k-1)-й момент времени; углом
в (k-1)-й момент времени; углом  образованным осью ОлХл лучевой системы координат носителя радиоэлектронной системы сопровождения ОлХлYлZл и проекцией продольной оси летательного аппарата на плоскость ОлХлZл лучевой системы координат носителя радиоэлектронной системы сопровождения OлXлYлZл, в k-й момент времени и углом
образованным осью ОлХл лучевой системы координат носителя радиоэлектронной системы сопровождения ОлХлYлZл и проекцией продольной оси летательного аппарата на плоскость ОлХлZл лучевой системы координат носителя радиоэлектронной системы сопровождения OлXлYлZл, в k-й момент времени и углом  в (k-1)-й момент времени, информация о которых поступает от телевизионной системы, и вычисляемый в соответствии с выражением:
в (k-1)-й момент времени, информация о которых поступает от телевизионной системы, и вычисляемый в соответствии с выражением:

при допущении, что углы атаки и скольжения летательного аппарата в k-й момент времени: αk=0 и βk=0 соответственно; причем если в (k-1)-й момент времени угол  то второе слагаемое выражения (1)
то второе слагаемое выражения (1)  имеет знак "плюс"; если в (k-1)-й момент времени угол
имеет знак "плюс"; если в (k-1)-й момент времени угол  то второе слагаемое выражения (1)
то второе слагаемое выражения (1)  имеет знак "минус"; а также с использованием информации о параметрах собственного движения носителя радиоэлектронной системы сопровождения - информации о линейной скорости носителя радиоэлектронной системы сопровождения в k-й момент времени vн k, угле наклона траектории носителя радиоэлектронной системы сопровождения в k-й момент времени θн k и угле поворота траектории носителя радиоэлектронной системы сопровождения в k-й момент времени φн k, поступающей от системы автономных датчиков; и информации об углах пеленга в вертикальной плоскости εвk и горизонтальной плоскости εrk в k-й момент времени, поступающей от теплопеленгатора, применяемой при вычислении расстояния Дн k, преодолеваемого носителем радиоэлектронной системы сопровождения за интервал дискретизации Т, в k-й момент времени:
имеет знак "минус"; а также с использованием информации о параметрах собственного движения носителя радиоэлектронной системы сопровождения - информации о линейной скорости носителя радиоэлектронной системы сопровождения в k-й момент времени vн k, угле наклона траектории носителя радиоэлектронной системы сопровождения в k-й момент времени θн k и угле поворота траектории носителя радиоэлектронной системы сопровождения в k-й момент времени φн k, поступающей от системы автономных датчиков; и информации об углах пеленга в вертикальной плоскости εвk и горизонтальной плоскости εrk в k-й момент времени, поступающей от теплопеленгатора, применяемой при вычислении расстояния Дн k, преодолеваемого носителем радиоэлектронной системы сопровождения за интервал дискретизации Т, в k-й момент времени:

| ЗИНГЕР Р | |||
| Оценка характеристик оптимального фильтра для слежения за пилотируемой целью | |||
| - Зарубежная радиоэлектроника, 1971, №8, с.40-57 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2264598C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2004 |
|
RU2282869C1 |
| RU 2005108029 А, 10.09.2006 | |||
| WO 2007118108 А2, 18.10.2007 | |||
| Механизм для последовательного подвода заготовок к инструменту и к отводному лотку в станках для обрезки патронных гильз | 1933 |
|
SU36376A1 |
| US 2007294032 А1, 20.12.2007 | |||
| СПОСОБ УЛУЧШЕННОЙ ФОТОЭПИЛЯЦИИ НА ОСНОВЕ НАНОКОМПЛЕКСОВ МЕТАЛЛОВ | 2011 |
|
RU2630976C2 |

