Изобретение относится к области безопасности полетов и, в частности, к способам определения близости траекторий движения летательных аппаратов (ЛА) к элементам земной поверхности. Изобретение предназначено для использования на любых видах ЛА, в том числе обладающих высокими маневренными возможностями.
Уровень техники
Существуют и широко используются способы, предназначенные как для точного определения, так и для оценки близости траекторий ЛА к элементам рельефа местности. В их основе лежит определение положения ЛА с помощью навигационной системы, определение параметров текущего динамического состояния, вычисление прогнозируемой траектории, формирование зоны, определенной формы, обеспечивающей необходимое расстояние до элементов земной поверхности, сопоставление ее с рельефом местности и, как итог, различная по степени точности оценка близости траектории к рельефу местности на основе сопоставления размеров такой зоны и элементов рельефа, попавших в нее [RU 7000106, US 60097895, US 7321813, US 70185652, US 70050101].
В указанных способах оценка близости траектории к земной поверхности производится путем анализа наличия элементов рельефа местности в пространственной области по курсу ЛА [см., например, RU 7000106, US 60097895, US 7321813, US 70185652, US 70050101].
Недостаток таких, уже существующих, способов обусловлен ограниченностью в возможностях оценки близости поверхности земли к траектории для любого прогнозируемого момента времени, а также малой их применимостью к ЛА, обладающим высокими маневренными возможностями. Данные недостатки обнаруживаются в связи с тем, что определение близости поверхности земли основывается на анализе попадания элементов рельефа в пространственную зону фиксированной формы, которая в различных работах носит название «коридора безопасности», «профиля безопасности» или «зоны безопасности», и которая в недостаточной степени учитывает возможное развитие полетной ситуации во времени. Таким образом, элемент рельефа местности, находящийся в непосредственной близости к текущему положению ЛА или его прогнозируемой траектории, но не попавший в «зону безопасности», в силу особенностей ее построения, будет не учтен, что может привести к столкновению. Между тем, для избежания столкновения, во многих случаях, необходимо располагать сведениями относительно близости земли для всех точек прогнозируемой траектории по всем направлениям, чтобы иметь возможность заранее корректировать траекторию на основе постоянной оценки ее близости к земной поверхности, что приобретает особенное значение для высокоманевренных ЛА.
В качестве ближайшего аналога заявляемого способа выбран способ оценки близости траектории ЛА к рельефу местности, описанный в US60097895. Необходимо отметить, что данный способ является лишь частичным аналогом заявляемого.
В способе, выбранном в качестве ближайшего аналога, осуществляют наиболее общие и характерные действия, служащие для оценки близости траектории ЛА к земной поверхности, а именно, определяют местоположение летательного аппарата с помощью навигационной системы, производят определение параметров текущего динамического состояния, формируют так называемый «профиль безопасности», проверяют отсутствие элементов рельефа местности и искусственных препятствий в нем. В случае обнаружения элементов рельефа, получают оценку близости участка траектории, для которого построен «профиль безопасности», содержащий элемент рельефа, к земной поверхности.
Данный способ предусматривает возможность определения близости земной поверхности лишь в достаточно ограниченной области вблизи непосредственного нахождения ЛА. Определение близости рельефа местности осуществляется без учета прогноза развития ситуации на определенное время вперед и только в случае его попадания в «профиль безопасности», в остальные моменты времени, когда «профиль безопасности» чист, пилот не имеет никакой информации относительно близости рельефа местности. Это обстоятельство делает невозможным заблаговременное принятие пилотом решений относительно дальнейших действий на основе текущей и прогнозируемой высоты над рельефом местности.
Таким образом, определение близости опасного рельефа реализуется не в полной мере.
Раскрытие изобретения
В основу заявляемого изобретения положена задача повышения безопасности полетов, обеспечивающаяся путем оценки близости траектории ЛА к земной поверхности. Оценка близости траектории к рельефу местности используется в системах обеспечения безопасности полетов, в том числе активных, для оказания экипажу помощи в принятии решений относительно режимов управления ЛА и, как следствие, предотвращения столкновений с земной поверхностью.
В соответствии с этим, для реализации способа необходимо располагать данными о прохождении в пространстве траектории, близость которой к элементам рельефа местности оценивается. В случае определения близости земной поверхности к прогнозируемой траектории, начальные условия для ее расчета задаются текущими динамическими параметрами ЛА.
Сущность заявляемого способа основывается на оценке минимального расстояния до элементов рельефа местности для каждой из точек, принадлежащих прогнозируемой траектории. При этом определение минимального расстояния производится по всем направлениям и основывается на принципе построения сфер, свободных от элементов рельефа местности и искусственных препятствий, с центром в точке прогнозируемой траектории, для которой производится оценка близости земной поверхности. Построение сфер производится таким образом, что центр каждой последующей сферы находится в точке пересечения аппроксимируемой прогнозной траектории летательного аппарата с поверхностью предыдущей сферы.
Таким образом, для участка траектории, находящегося внутри зоны, образованной сферами, формируется оценочное расстояние до рельефа местности, определяющееся радиусом соответствующей сферы. В процессе объединения построенных таким образом сфер, оценивается близость траектории ЛА к земной поверхности для любого прогнозного момента времени.
Краткое описание чертежей
На чертеже представлен набор сфер, радиус каждой из которых формирует минимальное расстояние от точки центра сферы, принадлежащей траектории ЛА, до элементов земной поверхности. Точка траектории, находящаяся внутри сферы, считается настолько же удаленной от рельефа местности, каково кратчайшее расстояние от этой точки до поверхности сферы, при условии, что данная поверхность не является частью последующей или предыдущей сферы.
Осуществление изобретения
Заявляемый способ реализуется следующей последовательностью действий.
С помощью навигационной системы производится определение местоположения и текущих параметров динамического состояния летательного аппарата 1 (путевая скорость - Wп, вертикальная скорость - Wy, путевой угол - ПУ, скорость разворота -  ωу и др.).
ωу и др.).
Следующим шагом является вычисление прогнозируемой траектории 2, на определенное время вперед. Прогнозируемая траектория вычисляется в отдельном функциональном блоке решением системы дифференциальных уравнений движения ЛА.
Дальнейшая реализация способа осуществляется с помощью функционального блока бортовой базы данных (ББД).
ББД содержит цифровую модель местности, представляющую собой совокупность значений отметок превышений рельефа 3, привязанных к углам координатной сетки и являющихся цифровым выражением высотных характеристик рельефа на топографической карте. Дополнительно в ББД содержится информация об искусственных препятствиях антропогенного происхождения, включающая в себя сведения об аэродромах (координаты и превышения контрольных точек аэродромов, координаты и превышения порогов взлетно-посадочной полосы (ВПП), магнитные/истинные путевые углы ВПП). Бортовая база данных может быть реализована в отдельном функциональном блоке.
На основе текущих координат летательного аппарата в виде X, Y, Z (где X - текущая географическая широта, Y - текущая географическая долгота, Z - высота ЛА над геоидом в текущий момент), полученных с помощью навигационной системы, и фактического курса, на вход блока ББД передается прогнозируемая траектория, заданная, например, в виде массива точек, аппроксимирующих кривую в пространстве, или любым другим способом.
На выходе блока ББД, после обработки поступившей информации, возвращается массив радиусов 5, равных минимальному расстоянию 4 до рельефа и искусственных препятствий для центров соответствующих сфер, и истинных высот ЛА в этих же центрах.
Данные, полученные от блока ББД, объединяются вместе, в результате чего сферы 6, в соответствии с вычисленными радиусами, формируют оценку близости траектории ЛА к земной поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2006 |
|
RU2301456C1 |
| ИНТЕГРАЛЬНЫЙ ПИЛОТАЖНО-НАВИГАЦИОННЫЙ ДИСПЛЕЙ | 1991 |
|
RU2014250C1 |
| СПОСОБ УПРАВЛЕНИЯ МАЛОВЫСОТНЫМ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2023 |
|
RU2822805C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ САМОЛЕТОВ И ВЕРТОЛЕТОВ С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2008 |
|
RU2376645C1 |
| Способ оценки маловысотного контура управления ЛА | 2018 |
|
RU2691984C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ С ЗЕМЛЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА С УСОВЕРШЕНСТВОВАННОЙ СИСТЕМОЙ ВИЗУАЛИЗАЦИИ | 1999 |
|
RU2211489C2 |
| Способ интеллектуальной поддержки экипажа | 2020 |
|
RU2767406C1 |
| СПОСОБ И СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ | 2007 |
|
RU2368954C2 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ СБРОСЕ ГРУЗОВ В ТОЧКУ ЗЕМНОЙ ПОВЕРХНОСТИ С МАНЕВРИРУЮЩЕГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2295104C1 |
| СИСТЕМА УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В РЕЖИМЕ УВОДА С ОПАСНОЙ ВЫСОТЫ ПРИ РАБОТЕ ПО НАЗЕМНЫМ ОБЪЕКТАМ | 2016 |
|
RU2644048C2 |
Изобретение относится к технике обеспечения безопасности полетов летательных аппаратов (ЛА). Согласно предложенному способу определяют местоположение ЛА с помощью навигационной системы производят определение параметров текущего динамического состояния, вычисляют прогнозируемую траекторию и производят оценку близости траектории ЛА к элементам рельефа. При этом оценку близости траектории к земной поверхности производят построением набора сфер с центрами, располагаемыми на траектории, и радиусами, равными минимальному расстоянию до элементов рельефа и искусственных препятствий от соответствующих центров. Построение сфер производят таким образом, что центр каждой последующей сферы находится в точке пересечения аппроксимируемой прогнозной траектории ЛА с поверхностью предыдущей сферы. Изобретение позволяет повысить безопасность полетов ЛА путем динамической оценки близости траекторий ЛА к земной поверхности. 1 ил.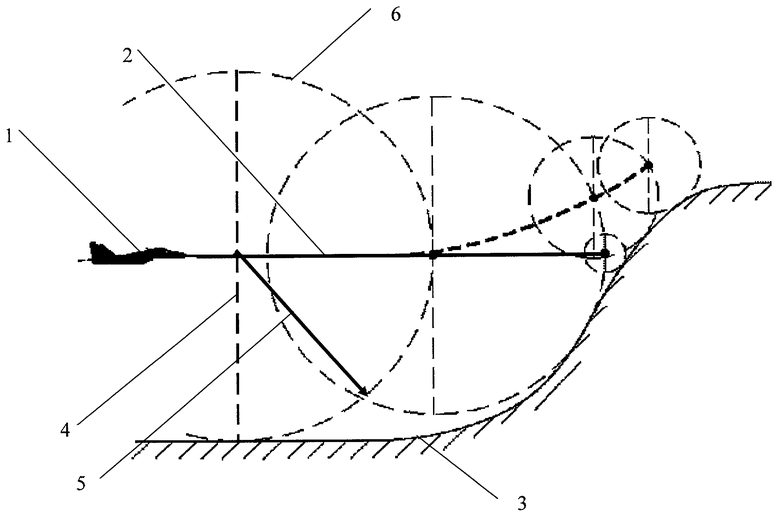
1. Способ оценки близости траекторий летательных аппаратов (ЛА) к земной поверхности, согласно которому определяют местоположение ЛА с помощью навигационной системы, определяют параметры текущего динамического состояния, с использованием полученных параметров и фактического курса ЛА вычисляют прогнозируемую траекторию ЛА, отличающийся тем, что строят набор свободных от элементов рельефа местности сфер с центрами, располагаемыми на прогнозируемой траектории, и радиусами, равными минимальному расстоянию от соответствующих центров до элементов рельефа и искусственных препятствий, и о близости участка траектории, находящегося внутри зоны, образованной сферами, судят по радиусам соответствующих сфер.
2. Способ по п.1, отличающийся тем, что построение сфер производят таким образом, что центр каждой последующей сферы находится в точке пересечения аппроксимируемой прогнозной траектории ЛА с поверхностью предыдущей сферы.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ С ЗЕМЛЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА С УСОВЕРШЕНСТВОВАННОЙ СИСТЕМОЙ ВИЗУАЛИЗАЦИИ | 1999 |
|
RU2211489C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2003 |
|
RU2234739C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 1995 |
|
RU2153195C1 |

