Изобретение относится к технике железнодорожного транспорта, в частности к технике определения местоположения путеизмерительного средства на железнодорожном пути с помощью путевых устройств.
Наиболее близким по технической сущности и достигаемому техническому результату является способ определения местоположения на железнодорожном пути (далее возможно использование эквивалентного термина «путь») компьютеризированного вагона-лаборатории типа КВЛ-Э.2 для испытаний контактной сети (далее - вагон-путеизмеритель), в котором в процессе движения вагона-путеизмерителя с железнодорожной станции регистрируют моменты появления путевых устройств и измеряют пройденное расстояние, полученные данные запоминают и с их помощью определяют местоположение вагона-путеизмерителя. Этот способ и система для его реализации приняты за прототип.
Система для осуществления способа определения местоположения на железнодорожном пути вагона-путеизмерителя включает в себя путевые устройства и вагон-путеизмеритель, в состав которого входят вычислитель, пульт управления, запоминающее устройство, одометр и датчик обнаружения путевых устройств, причем одометр и датчик обнаружения путевых устройств соединены с первым информационным портом вычислителя, запоминающее устройство подключено ко второму информационному порту вычислителя, а его третий информационный порт соединен с пультом управления.
В качестве путевых устройств в прототипе используются опоры подвески контактного провода, а в качестве датчика обнаружения путевых устройств применяется «Отметчик опор ДО» (рекламный листок «ОТМЕТЧИК ОПОР ДО» ©ЗАО НПЦ «ИНФОТРАНС», 2004, г.Самара; рекламный листок «Компьютеризированный вагон-лаборатория для испытания контактной сети КВЛ-Э.2» ©ЗАО НПЦ «ИНФОТРАНС», 2007, г.Самара). «Отметчик опор ДО» (датчик обнаружения путевых устройств) работает по принципу локации опор подвески контактного провода инфракрасным (ИК) лучем и выдает двоичную информацию типа «есть опора» - «нет опоры» («1»-«0»).
При всех достоинствах этого способа и системы для его реализации следует заметить, что не исключены их сбои, вызванные сбоями датчика обнаружения путевых устройств ("Отметчика опор ДО"), например, при интенсивных атмосферных осадках, ведущих к пропуску регистрации моментов прохождения мимо него опор подвески контактного провода. Полученные с помощью датчика обнаружения путевых устройств данные содержат минимум информации и поэтому не могут быть использованы и скорректированы без привлечения дополнительной информации, например о пройденном вагоном-путеизмерителем расстоянии, получаемой с помощью одометра (измерителя пройденного пути).
Кроме того, способ и система для его осуществления не обеспечивают автоматической жесткой информационной «привязки» железнодорожных станций к пути (например, их географических координат и названий, принятого на железной дороге километража и т.п.).
Техническим результатом, на достижение которого направлено создание предлагаемого способа и системы для его реализации, является обеспечение надежного автоматического определения местоположения вагона-путеизмерителя на железнодорожном пути.
Поставленная цель достигается тем, что в способе определения местоположения на железнодорожном пути вагона-путеизмерителя, в котором в процессе его движения с железнодорожной станции измеряют пройденный путь и регистрируют моменты появления путевых устройств, полученные данные запоминают и с их помощью определяют местоположение вагона-путеизмерителя, - в нем регистрируют информацию о железнодорожных станциях, вычисляют расстояния между путевыми устройствами, преобразуют эти расстояния в двоичную кодовую последовательность пути, дополняют ее информацией о железнодорожных станциях и запоминают, в процессе определения местоположения вагона-путеизмерителя на железнодорожном пути при движении его с железнодорожной станции регистрируют информацию о железнодорожных станциях, вычисляют расстояния между путевыми устройствами, преобразуют эти расстояния в двоичную кодовую последовательность местоположения, дополняют ее информацией о железнодорожных станциях и запоминают, вычисляют функцию взаимной корреляции двоичной кодовой последовательности местоположения и двоичной кодовой последовательности пути, находят ее абсолютный экстремум, при этом выявляют и корректируют возможные погрешности двоичной кодовой последовательности местоположения и определяют реальное положение вагона-путеизмерителя относительно путевых устройств по положению двоичной кодовой последовательности местоположения относительно двоичной кодовой последовательности пути, а по выявленным возможным погрешностям двоичной кодовой последовательности местоположения судят об исправностях путевых устройств,
а в систему для осуществления способа определения местоположения на железнодорожном пути вагона-путеизмерителя, включающую путевые устройства, установленные вдоль железнодорожного пути, и вагон-путеизмеритель, в состав которого входят вычислитель, пульт управления, запоминающее устройство, одометр и датчик обнаружения путевых устройств, причем одометр и датчик обнаружения путевых устройств соединены с первым информационным портом вычислителя, запоминающее устройство подключено ко второму информационному порту вычислителя, а его третий информационный порт соединен с пультом управления, - вновь введены маркерные передатчики, установленные на железнодорожных станциях, и маркерный приемник, который подключен к первому информационному порту вычислителя вагона-путеизмерителя.
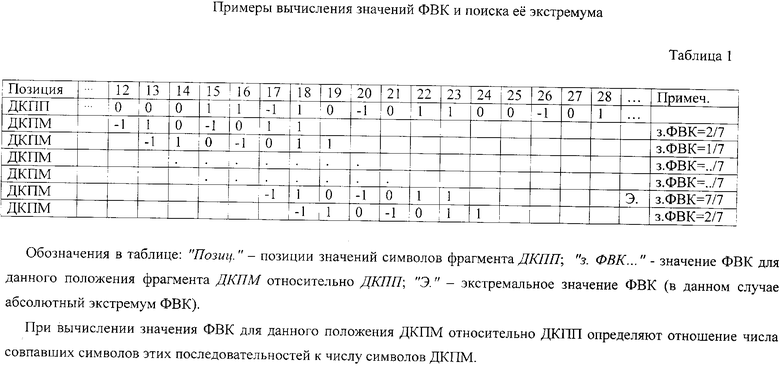
На чертеже представлена структурная схема системы для осуществления способа определения местоположения подвижного состава, например вагона-путеизмерителя, на железнодорожном пути с помощью путевых устройств, а в таблице 1 приведены примеры вычисления значений функции взаимной корреляции двоичной кодовой последовательности пути и двоичной кодовой последовательности местоположения (см. ниже) и поиска экстремума этой функции. Железнодорожный путь и железнодорожные станции условно на чертеже не показаны.
Система состоит из следующих основных элементов: путевые устройства 1.1, 1.2, …1.k, …1.n, маркерный передатчик 2 (установлен на каждой железнодорожной станции и дополняет состав путевых устройств), вагон-путеизмеритель 3, направление 4 движения вагона-путеизмерителя 3, датчик обнаружения путевых устройств 5, вычислитель 6, пульт управления 7, запоминающее устройство (ЗУ) 8, одометр 9, маркерный приемник 10, локальные каналы связи 11 и 12.
В системе вдоль железнодорожного пути от железнодорожной станции (на чертеже не показаны) расположены путевые устройства 1.1, 1.2, …1.k, …1.n, например, опоры подвески контактного провода, а на каждой железнодорожной станции, например в непосредственной близости от выходного стрелочного перевода, установлен маркерный передатчик 2 сигналов идентификации железнодорожной станции. Локальный канал связи 11 (например, радио) связывает маркерный передатчик 2 и маркерный приемник 10.
Сигналами идентификации железнодорожной станции являются, например, ее наименование, «привязки» к километражу пути и географическим координатам, направление движения (четное - нечетное) и другая семантическая информация, в том числе определяющая ее в сети дорог страны. Информация идентификации железнодорожных станций упрощает получение необходимых данных, в том числе по требованиям потребителей и необходима для воспроизведения на пульте управления 6.
Расстояния между смежными путевыми устройствами в реальности всегда разнятся, например, из-за неизбежных неточностей их выдерживания.
На железнодорожной станции находится вагон-путеизмеритель 3, который может двигаться в направлении 4. В состав вагона-путеизмерителя 3 входят последовательно включенные с помощью информационных портов датчик обнаружения путевых устройств 5, вычислитель 6, пульт управления 7, а также запоминающее устройство 8 и одометр 9. Информационный порт запоминающего устройства 8 соединен со вторым информационным портом вычислителя 6. Датчик обнаружения путевых устройств 5, одометр 9 и маркерный приемник 10 вагона-путеизмерителя 3 подключены к первому информационному порту вычислителя 6, а к его третьему информационному порту подключен пульт управления 7.
Локальный канал связи 12 связывает путевые устройства, например, 1.1 и датчик обнаружения путевых устройств 5 (например, ИК-канал с отражением излучения от путевого устройства).
Способ определения местоположения на железнодорожном пути вагона-путеизмерителя реализуется системой для его осуществления, представленной на чертеже и в приведенном выше ее описании.
Сперва создают своеобразную «карту» железнодорожного пути (ниже она обозначена как двоичная кодовая последовательность пути - ДКПП) и запоминают ее в запоминающем устройстве 8.
Движение вагона-путеизмерителя 3 начинают с определенной железнодорожной станции (назовем ее исходным пунктом маршрута - ИПМ, который начинается от маркерного передатчика 2 этой железнодорожной станции).
В этом процессе последовательно считывают сигналы маркерного передатчика 2 каждой железнодорожной станции и путевых устройств 1.1, 1.2, …1.k, …1.n соответственно маркерным приемником 10 и датчиком обнаружения путевых устройств 5 посредством локальных каналов связи 11 и 12. Одновременно измеряют пройденный путь с помощью одометра 9. Сигналами маркерного приемника 10 идентифицируют каждую железнодорожную станцию и определяют начало маршрута движения вагона-путеизмерителя 3 от ИПМ. Эти сигналы преобразуют в вычислителе 6, индицируют на пульте управления 7 и запоминают в запоминающем устройстве 8.
Локальные каналы связи 11 и 12 устанавливают во время движения вагона-путеизмерителя 3 в моменты попадания соответствующего устройства в зону действия его датчика (маркерного передатчика 2, непрерывно излучающего сигналы идентификации железнодорожной станции, - в зону действия маркерного приемника 10, путевых устройств 1.1, 1.2,…1.k,…1.n - в моменты попадания их в поле зрения датчика обнаружения путевых устройств 5).
При движении вагона-путеизмерителя 3 от ИПМ вычисляют с помощью вычислителя 6 и запоминают в ЗУ 8, например, двоичную кодовую последовательность пути (ДКПП). Двоичные данные для ДКПП получают в процессе последовательного сравнения смежных пройденных расстояний S1.2,: между маркерным передатчиком 2 (ИПМ) и путевым устройством 1.1 (S1.2), между путевыми устройствами 1.2 и 1.1 (S1.2),…между путевыми устройствами 1.k-1 и 1.k (S1.k) и т.д., например, с помощью одного из выражений:
если S1.k>S1.k-1, то «1»; если S1.k=S1.k-1, то «0»; если S1.k<S1.k.1, то «-1».
Этим методом сооружения пути 1.1, 1.2,…1.k,…1.n (в том числе и железнодорожные станции) точно представляют в ДКПП и по наличию и по месту расположения относительно таковых же.
Информацией о железнодорожных станциях (ее получают от маркерного приемника 10) в ДКПП обеспечивают абсолютную «привязку» путевых устройств 1.1, 1.2,…1.k,…1.n к железнодорожному пути.
Локальные ДКПП (полученные по отдельным железным дорогам) «сшивают», при необходимости, в глобальную ДКППРФ страны посредством абсолютных «привязок» путевых устройств к железнодорожному пути.
Аналогично формируют двоичную кодовую последовательность местоположения (ДКПМ) в режиме определения местоположения вагона-путеизмерителя 3 на железнодорожном пути в процессе его движения от ИПМ, который реализуют, например, с момента подачи команды исполнения этого режима с пульта управления 7. При этом автоматически запрашивают соответствующую локальную ДКПП с началом от ИПМ (при необходимости используют ДКППРФ) из запоминающего устройства 8 и начинают вычислять функцию взаимной корреляции ДКПП и ДКПМ (ФВК) с помощью вычислителя 6. ДКПМ, как и ДКПП, запоминают в ЗУ 8.
ФВК вычисляют как, например, отношение суммы результатов операций "Исключающее ИЛИ" соответствующих символов ДКПМ и ДКПП к числу символов ДКПМ (учитывают только число символов, содержащихся в ДКПМ или ее фрагменте) и находят ее экстремум (пример вычисления значений ФВК и поиска ее экстремума приведен в таблице 1).
В идеальном случае (соответствующие символы ДКПМ и ДКПП одинаковы) экстремум ФВК равен 1. Такой экстремум ФВК назовем абсолютным экстремумом ФВК.
Абсолютный экстремум ФВК соответствует точному совмещению ДКПМ с ДКПП, т.е. точному положению вагона-путеизмерителя 3 относительно путевых устройств 1.1, 1.2, …1k, …1.n и железнодорожных станций. Поэтому начало ДКПМ (начало маршрута от ИПМ) ставят в соответствие началу процесса определения местоположения вагона-путеизмерителя 3 на железнодорожном пути относительно ИПМ, а конец (последний момент появления соответствующего путевого устройства) - текущему положению вагона-путеизмерителя 3 относительно этого путевого устройства. В случае отсутствия абсолютного экстремума ФВК реализуют его поиск, в процессе которого выявляют и восстанавливают конкретные потерянные символы ДКПМ. Потеря символа ДКПМ означает, что имеется дефект конкретного путевого устройства или сбой датчика обнаружения путевых устройств 5.
Обращаясь к приведенному выше примеру (см. таблицу 1), отмечаем, что вагон-путеизмеритель 3 начал двигаться до считывания позиции 17 ДКПП (например, "11:48:02. 2010.10.08. Выходная стрелка ст."Макушино") и находится на железнодорожном пути после прохождения позиции 23 ДКПП (например, "12:10:22. 2010.10.08. 188 опора подвески КП, 2898 км").
Управление работой системы, реализующей данный способ, осуществляют с помощью пульта управления 7 (считывают информацию, подают соответствующие команды, задают режимы работы, контролируют работу системы и т.д.). При этом выполняют, при необходимости, режимы обмена информацией с запоминающим устройством 8, режим определения местоположения вагона-путеизмерителя 3 на железнодорожном пути, а также другие обеспечивающие работу способа служебные режимы и команды. Например, отображают названия пунктов маршрута, снабженные необходимой служебной информацией (в качестве примера отображения: "16:48:22. 2010.08.08 Пройдена ст."Асаново" или "06:48:22. 2010.08.18. Неисправность "Не индицируется 123 опора КП, 456 км").
Информацию запоминающего устройства 8 при необходимости меняют известными методами (с помощью радиосвязи, мобильного Internet, жестких дисков, компакт-дисков и т.п.).
Поиск экстремума ФВК в общем случае осуществляют для всех возможных сдвигов ДКПМ относительно ДКПП или ДКППРФ.
Таким образом, определение местоположения вагона-путеизмерителя на железнодорожном пути осуществляют по случайным сигналам параметров, жестко «привязанных» к нему объектов (в приведенном случае - вариации расстояний между опорами подвески контактного провода).
Заявленный «Способ определения местоположения на железнодорожном пути вагона-путеизмерителя и система для его осуществления» обеспечивает потенциальные возможности для автоматизации вождения поездов, повышения их скоростей и безопасности движения.
Реализация «Способа определения местоположения на железнодорожном пути вагона-путеизмерителя и системы для его осуществления» не требует значительных проектных и монтажных работ и может быть проведена преимущественно на уровне организационных мероприятий и корректировки существующих технологических процессов железнодорожного транспорта, а также сравнительно небольших доработок оборудования и программного обеспечения вагона-путеизмерителя.
Проведя анализ уровня техники по научно-техническим и патентным источникам информации, заявитель не обнаружил аналог с признаками, тождественными (идентичными) признакам заявляемого изобретения «Способ определения местоположения на железнодорожном пути вагона-путеизмерителя и система для его осуществления». Анализу предшествовал поиск и выявление источников, содержащих сведения об аналогах заявляемого изобретения.
Определение из перечня аналогов наиболее близкого технического решения (прототипа) позволило выявить совокупность существенных по отношению к усматриваемому техническому результату отличительных признаков в заявляемом «Способе определения местоположения на железнодорожном пути вагона-путеизмерителя и системе для его осуществления», изложенных в формуле изобретения. Следовательно, заявляемое изобретение соответствует критерию «новизна».
Для проверки соответствия заявляемого изобретения критерию «изобретательский уровень» заявителем проведен дополнительный поиск известных решений, чтобы выявить признаки, совпадающие с отличительными от прототипа признаками заявляемых «Способа определения местоположения на железнодорожном пути вагона-путеизмерителя и системы для его осуществления». Результаты поиска показали, что заявляемое изобретение не вытекает для специалиста явным образом из известного уровня техники, определенного заявителем. Следовательно, заявляемое изобретение соответствует критерию «изобретательский уровень».
Критерий промышленной применимости заявляемого изобретения «Способ определения местоположения на железнодорожном пути вагона-путеизмерителя и система для его осуществления» подтверждается его потенциальной эффективностью и относительно простой реализуемостью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НА ЖЕЛЕЗНОДОРОЖНОМ ПУТИ ВАГОНА-ПУТЕИЗМЕРИТЕЛЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2370396C1 |
| Способ мониторинга технического состояния железнодорожного пути и устройство для его осуществления | 2021 |
|
RU2780704C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2074829C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
| Информационно-управляющая система перемещения рельсов, шпал и балласта для обеспечения работоспособности железнодорожного пути по заданным критериям | 2020 |
|
RU2738026C1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ, ПРОДОЛЬНОМ ПРОФИЛЕ И ПО УРОВНЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2320801C1 |
| Устройство для контроля состояния рельсового пути и для определения его пространственных координат | 2022 |
|
RU2793310C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2016 |
|
RU2618660C1 |
| СПОСОБ КОНТРОЛЯ ПОПЕРЕЧНОГО ПРОФИЛЯ И РАССТОЯНИЯ МЕЖДУ РЕЛЬСАМИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ВАГОН-ПУТЕИЗМЕРИТЕЛЬ | 2010 |
|
RU2418705C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2442713C1 |

Изобретение относится к технике определения местоположения путеизмерительного средства на железнодорожном пути с помощью путевых устройств. Способ заключается в том, что регистрируют информацию о железнодорожных станциях, вычисляют расстояния между путевыми устройствами, преобразуют эти расстояния в двоичную кодовую последовательность пути, дополняют ее информацией о железнодорожных станциях и запоминают, в процессе определения местоположения вагона-путеизмерителя на железнодорожном пути при движении его с железнодорожной станции регистрируют информацию о железнодорожных станциях, вычисляют расстояния между путевыми устройствами, преобразуют эти расстояния в двоичную кодовую последовательность местоположения, дополняют ее информацией о железнодорожных станциях и запоминают, вычисляют функцию взаимной корреляции двоичной кодовой последовательности местоположения и двоичной кодовой последовательности пути, находят ее абсолютный экстремум, выявляют и корректируют возможные погрешности двоичной кодовой последовательности местоположения и определяют реальное положение вагона-путеизмерителя относительно путевых устройств по положению двоичной кодовой последовательности местоположения относительно двоичной кодовой последовательности пути. По выявленным возможным погрешностям двоичной кодовой последовательности местоположения судят об исправностях путевых устройств. Система содержит путевые устройства, вагон-путеизмеритель, в состав которого входят вычислитель, пульт управления, запоминающее устройство, одометр и датчик обнаружения путевых устройств, маркерные передатчики, маркерный приемник. Технический результат заключается в обеспечении надежного определения местоположения вагона-путеизмерителя на железнодорожном пути. 2 н.п. ф-лы, 1 ил., 1 табл.
1. Способ определения местоположения на железнодорожном пути вагона-путеизмерителя, в котором в процессе его движения с железнодорожной станции измеряют пройденный путь и регистрируют моменты появления путевых устройств, полученные данные запоминают и с их помощью определяют местоположение вагона-путеизмерителя, отличающийся тем, что регистрируют информацию о железнодорожных станциях, вычисляют расстояния между путевыми устройствами, преобразуют эти расстояния в двоичную кодовую последовательность пути, дополняют ее информацией о железнодорожных станциях и запоминают, в процессе определения местоположения вагона-путеизмерителя на железнодорожном пути при движении его с железнодорожной станции регистрируют информацию о железнодорожных станциях, вычисляют расстояния между путевыми устройствами, преобразуют эти расстояния в двоичную кодовую последовательность местоположения, дополняют ее информацией о железнодорожных станциях и запоминают, вычисляют функцию взаимной корреляции двоичной кодовой последовательности местоположения и двоичной кодовой последовательности пути, находят ее абсолютный экстремум, при этом выявляют и корректируют возможные погрешности двоичной кодовой последовательности местоположения и определяют реальное положение вагона-путеизмерителя относительно путевых устройств по положению двоичной кодовой последовательности местоположения относительно двоичной кодовой последовательности пути, а по выявленным возможным погрешностям двоичной кодовой последовательности местоположения судят об исправностях путевых устройств.
2. Система для осуществления способа определения местоположения на железнодорожном пути вагона-путеизмерителя, включающая путевые устройства, установленные вдоль железнодорожного пути, и вагон-путеизмеритель, в состав которого входят вычислитель, пульт управления, запоминающее устройство, одометр и датчик обнаружения путевых устройств, причем одометр и датчик обнаружения путевых устройств соединены с первым информационным портом вычислителя, запоминающее устройство подключено ко второму информационному порту вычислителя, а его третий информационный порт соединен с пультом управления, отличающаяся тем, что в нее введены маркерные передатчики, установленные на железнодорожных станциях, и маркерный приемник, который подключен к первому информационному порту вычислителя вагона-путеизмерителя.
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 0 |
|
SU391958A1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2280580C2 |
| СИСТЕМА СЧИТЫВАНИЯ ИНФОРМАЦИИ С ПОДВИЖНОГО СОСТАВА НА ДВУХПУТНОМ УЧАСТКЕ ЖЕЛЕЗНОЙ ДОРОГИ | 2002 |
|
RU2203822C1 |
| JP 2001239937 A, 04.09.2001. | |||

