Изобретение относится к области навигации летательных аппаратов с использованием искусственных спутников земли и может быть использовано при осуществлении посадки летательных аппаратов (ЛА).
Известны способы посадки ЛА, позволяющие определять координаты ЛА при посадке с использованием спутниковой навигационной системы, в которой прием сигналов спутников осуществляется на земле локальной контрольно-корректирующей станцией (ЛККС) с известными координатами, вычисляющей дифференциальные поправки к определяемым на борту ЛА по сигналам спутников значениям псевдодальности и соответственно значениям координат ЛА [1, 2].
Общим недостатком известных способов посадки является отсутствие обнаружения и коррекции скачков фазовых измерений в системе фазовой автоподстройки частоты (ФАПЧ) наземного и бортового приемников сигналов спутников.
В то же время требования к аппаратуре посадки [3] предусматривают использование фазовой информации для уточнения псевдодальностей, но в то же время упомянутые скачки фазовых измерений могут вносить существенные ошибки в измерения координат ЛА. Кроме того, скачки фазовых измерений могут снижать достоверность контроля целостности системы посадки, так как рекомендуемый нормативным документом [11] алгоритм контроля целостности, основанный на определении дисперсии флуктуационной ошибки координат, не учитывает наличие скачков фазовых измерений.
Известен ряд работ [4-7], в которых производится коррекция скачков фазы в спутниковой радионавигационной системе.
В патенте [4] коррекция скачков фазы основана на использовании сигналов широкозонных систем WAAS и EGNOS. Недостаток такого подхода заключается в том, что эти системы предназначены для обслуживания ограниченных областей земной поверхности - например США и Западной Европы. В частности, этот способ нельзя использовать в полярных районах из-за малого угла места геостационарных спутников.
В патенте [5] рассматривается обнаружение скачков фазы в системе, использующей три комплекта приемник-антенна. Недостатком этого способа обнаружения скачков является необходимость использования минимум двух приемников с антеннами.
Способ, описанный в статье [6], основан на обнаружении аномалий в «скользящем окне» на шкале времени. В этом случае изменение фазы аппроксимируется полиномом второй степени с оценкой коэффициентов полинома методом наименьших квадратов. Признаком появления скачка является значительное отклонение значения фазы от аппроксимирующего полинома в заданном «скользящем окне». Этот способ предполагает, что в «скользящее окно» попадает только один скачок. При частых скачках фазы этот метод дает ошибку.
В работе [7] предложен метод коррекции скачков фазы в кинематической системе реального времени (RTK) с использованием инерциальной навигационной системы. Однако надежная работа алгоритма RTK достигается не только с помощью инерциальной системы, но и двухчастотного приемного устройства.
Способ посадки ЛА с использованием спутниковой навигационной системы, соответствующий международным требованиям [11] и защищенный патентом фирмы Honeywell [8], является прототипом заявляемого изобретения. Согласно описанию [8] в способе предусмотрено определение псевдодальностей по кодовым измерениям.
Способ посадки летательных аппаратов с использованием спутниковой навигационной системы по патенту [8] состоит в том, что определяют текущие координаты летательного аппарата по ориентации относительно нескольких спутников с известными координатами, для чего производят прием сигналов спутников с помощью бортового приемника определяя бортовые псевдодальности путем кодовых измерений, одновременно производят прием сигналов спутников на локальной контрольно-корректирующей станции с известным местоположением с помощью наземного приемника, определяя наземные псевдодальности путем кодовых измерений, вычисляют дифференциальные поправки псевдодальностей, транслируют их и координаты заданной глиссады на борт летательного аппарата через линию передачи данных, а на борту производят прием и обработку упомянутых дифференциальных поправок, на основе которых корректируют значения бортовых псевдодальностей и формируют отклонение текущих координат летательного аппарата от заданной глиссады.
На основе данного способа функционирует устройство-прототип [8], представляющее собой систему посадки летательных аппаратов с использованием спутниковой навигационной системы, которая содержит N спутников с известными координатами, наземную аппаратуру, включающую локальную контрольно-корректирующую станцию с, по крайней мере, одним приемником, входом сопряженным с наземной антенной спутниковых сигналов, выход которого соединен с первым входом наземного вычислителя дифференциальных поправок, на второй вход которого поступает информация о координатах места локальной контрольно-корректирующей станции, выход которого соединен с первым входом передатчика линии передачи данных, второй вход которого соединен с выходом наземной базы данных, бортовую аппаратуру, включающую бортовой приемник, входом сопряженный с бортовой антенной спутниковых сигналов, выход которого соединен с первым входом бортового вычислителя псевдодальностей, второй вход которого соединен с первым выходом приемника линии передачи данных, второй выход которой соединен с первым входом вычислителя отклонений координат ЛА от заданной глиссады, второй вход которого соединен с выходом бортового вычислителя псевдодальностей, а выход которого является информационным выходом отклонения от заданной глиссады.
Недостатком способа-прототипа и устройства-прототипа является недостаточная точность определения координат, не соответствующая современным требованиям. Одним из способов повышения точности является использование не только кодовой, но и фазовой составляющей радиосигнала. В то же время известные методы [3, 9, 11] совместной кодофазовой фильтрации имеют недостаточную точность из-за влияния скачков фазового измерения псевдодальности.
Задачей заявляемых способа и системы посадки ЛА с использованием спутниковой навигационной системы является повышение точности вычисления координат ЛА и достоверности их определения благодаря учету фазовых измерений псевдодальности с обнаружением и коррекцией скачков.
Поставленная задача решаются следующим образом.
Предлагается способ посадки летательных аппаратов с использованием спутниковой навигационной системы, состоящий в том, что определяют текущие координаты летательного аппарата по ориентации относительно нескольких спутников с известными координатами, для чего производят прием сигналов спутников с помощью бортового приемника, определяют бортовые псевдодальности путем кодовых измерений, одновременно производят прием сигналов спутников на локальной контрольно-корректирующей станции с известным местоположением с помощью наземного приемника, определяя наземные псевдодальности путем кодовых измерений, транслируют координаты заданной глиссады на борт летательного аппарата в общем пакете информации через линию передачи данных, а на борту производят прием координат заданной глиссады, при этом на локальной контрольно-корректирующей станции и на борту летательного аппарата соответственно для наземного и бортового приемников одновременно с кодовыми измерениями наземных и бортовых псевдодальностей проводят фазовые измерения упомянутых псевдодальностей путем определения фазы несущей частоты сигналов спутников, вычисляют по фазовому измерению фазовую поправку измерения псевдодальности для каждого спутника с компенсацией ухода временной шкалы наземного и бортового приемников, далее выявляют скачки фазовых измерений наземного и бортового приемников для каждого спутника, производят компенсацию упомянутых скачков фазовых измерений, производят коррекцию псевдодальностей с учетом компенсации скачков фазовых измерений псевдодальностей, формируют уточненные значения наземных и бортовых псевдодальностей, по уточненным значениям наземных псевдодальностей определяют уточненные дифференциальные поправки, транслируют уточненные дифференциальные поправки на борт летательного аппарата в общем пакете информации совместно с координатами заданной глиссады, а на борту производят прием уточненных дифференциальных поправок, по упомянутым уточненным значениям бортовых псевдодальностей и уточенным дифференциальным поправкам проводят вычисление итоговых псевдодальностей, по которым формируют отклонения уточненных координат летательного аппарата от заданной глиссады.
Предлагается также на земле и на борту выявлять скачки фазового измерения каждого спутника путем формирования первой разности фазовой поправки с последующей фильтрацией путем сопоставления текущей величины первой разности фазовой поправки с взвешенной суммой предыдущих значений первой разности фазовой поправки.
Также предлагается на земле и на борту проводить компенсацию выявленных скачков фазовых измерений, имеющих место для одного или нескольких спутников, для чего вычисляют разности между текущими значениями первой разности фазовой поправки каждого спутника и средним арифметическим текущих значений первой разности всех спутников, на основе которых определяют суммарную поправку, которую суммируют со значением фазовых измерений псевдодальностей.
Предлагается система посадки ЛА, реализующая данный способ посадки. Предлагаемая система посадки ЛА с использованием спутниковой навигационной системы, содержащая N спутников с известными координатами, наземную аппаратуру, включающую ЛККС с, по крайней мере, одним приемником, входом сопряженным с наземной антенной спутниковых сигналов и имеющим выход кодовых измерений псевдодальностей, передатчика линии передачи данных, вход которого соединен с выходом наземной базы данных, бортовую аппаратуру, включающую бортовой приемник, входом сопряженный с бортовой антенной спутниковых сигналов и имеющий выход кодовых измерений псевдодальностей, приемник линии передачи данных, при этом наземный и бортовой приемники выполнены с выходами фазовых измерений псевдодальностей, в наземную и бортовую аппаратуру введены соответственно наземный и бортовой вычислители фазовых поправок, наземный и бортовой обнаружители скачков фазовых измерений, наземный и бортовой вычислители компенсированных значений фазовых измерений псевдодальностей, наземный и бортовой вычислители сглаживающих поправок псевдодальностей, наземный и бортовой вычислители уточненных значений псевдодальностей, и также в наземную аппаратуру введен вычислитель уточненных дифференциальных поправок, а в бортовую аппаратуру введены бортовой вычислитель итоговых псевдодальностей, вычислитель отклонений уточненных координат летательного аппарата от заданной глиссады, причем выход фазовых измерений псевдодальностей наземного приемника соединен с первым входом наземного вычислителя фазовых поправок, на второй вход которого поступает информация о координатах локальной ЛККС, выход которого соединен с входом наземного обнаружителя скачков фазовых измерений, выход которого соединен с входом наземного вычислителя компенсированных значений фазовых измерений псевдодальностей, выход которого соединен с входом наземного вычислителя сглаживающих поправок псевдодальностей, выход которого соединен с первым входом наземного вычислителя уточненных значений псевдодальностей, второй вход которого соединен с выходом кодовых измерений псевдодальностей наземного приемника, выход упомянутого вычислителя соединен с входом наземного вычислителя уточненных дифференциальных поправок, выход которого соединен со вторым входом передатчика линии передачи данных, а на борту выход фазовых измерений псевдодальностей бортового приемника соединен с первым входом бортового вычислителя фазовых поправок, на второй вход которого поступает информация о координатах ЛА, выход которого соединен с входом бортового обнаружителя скачков фазовых измерений, выход которого соединен с входом бортового вычислителя компенсированных значений фазовых измерений псевдодальностей, выход которого соединен с входом бортового вычислителя сглаживающих поправок псевдодальностей, выход которого соединен с первым входом бортового вычислителя уточненных значений псевдодальностей, второй вход которого соединен с выходом кодовых измерений псевдодальностей бортового приемника, выход упомянутого вычислителя соединен с первым входом бортового вычислителя итоговых псевдодальностей, второй вход которого соединен с первым выходом приемника линии передачи данных, выход бортового вычислителя итоговых псевдодальностей соединен с первым входом вычислителя отклонений уточненных координат ЛА от заданной глиссады, второй вход которого соединен с вторым выходом приемника линии передачи данных. Информация о координатах ЛА поступает, например, от имеющейся на борту инерциальной навигационной системы (ИНС).
Суть заявляемого способа поясняется с помощью Фиг.1.
Работа заявляемой системы посадки поясняется с помощью Фиг.2.
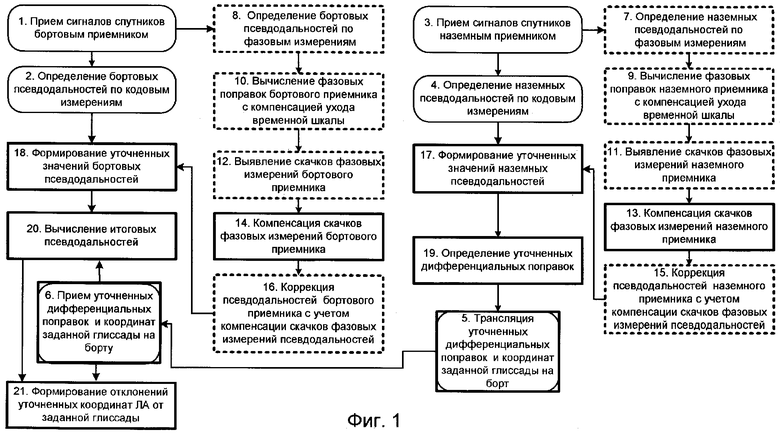
На Фиг.1 представлена последовательность операций при реализации способа посадки.
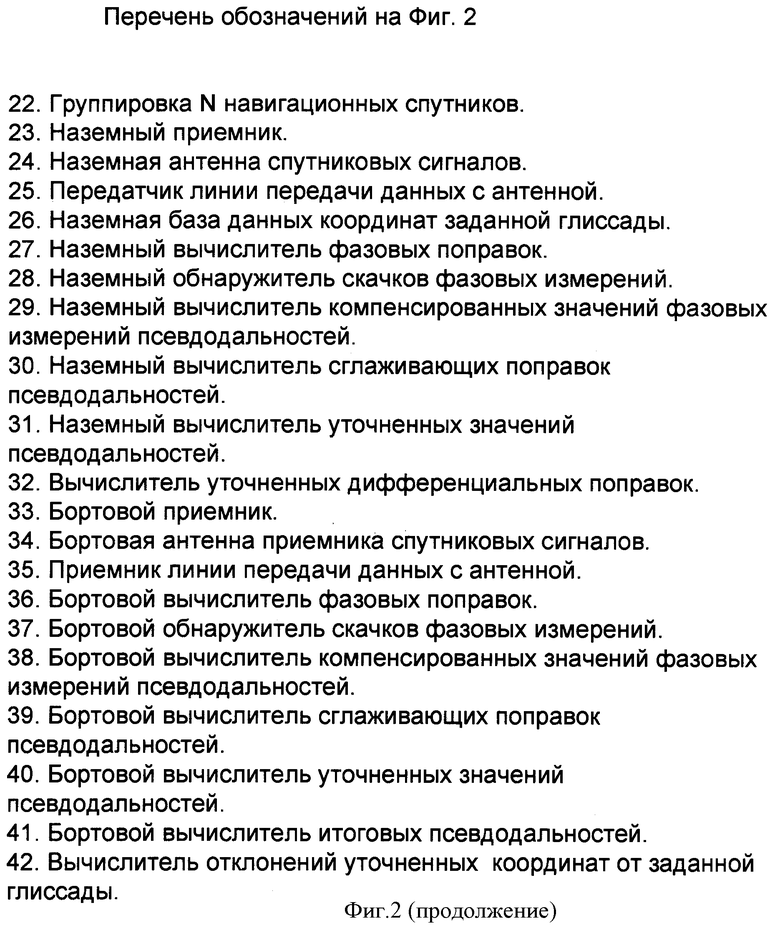
На Фиг.2. представлена блок-схема системы посадки.
На Фиг.1 операции, используемые в способе-прототипе [8], выделены овальным контуром, операции, используемые в аналогах [6, 7], выделены прямоугольным пунктирным контуром, вновь предложенные операции выделены прямоугольным непрерывным контуром.
На Фиг.2. вновь введенные блоки выделены более тонкой линией.
Способ согласно Фиг.1 включает характерные для способа-прототипа операции: прием сигналов спутников бортовым приемником 1, определение бортовых псевдодальностей по кодовым измерениям 2, прием сигналов спутников на ЛККС с известным местоположением с помощью наземного приемника 3, определение наземных псевдодальностей по кодовым измерениям 4, трансляцию координат заданной глиссады на борт ЛА в общем пакете информации через линию передачи данных (ЛПД) 5. На борту производят прием координат заданной глиссады 6.
Предложены новые операции, реализующие заявленный способ. Новизна способа состоит в том, что непрерывно и синхронно с определением наземных псевдодальностей по кодовым измерениям производят определение наземных псевдодальностей по фазовым измерениям 7, по которым вычисляют фазовую поправку измерения псевдодальности для каждого из спутников с компенсацией ухода временной шкалы наземного приемника 9, обнаруживают скачки фазовых измерений наземного приемника 11, компенсируют скачки фазового измерения наземного приемника 13, проводят коррекцию псевдодальностей наземного приемника с учетом компенсированного значения фазовых скачков 15, формируют уточненные значения псевдодальностей наземного приемника 17 и вычисляют уточненные дифференциальные поправки на ЛККС 19 и транслируют их на борт ЛА в общем пакете информации совместно с координатами заданной глиссады 5. А на борту непрерывно и синхронно с определением бортовых псевдодальностей по кодовым измерениям производят определение бортовых псевдодальностей по фазовым измерениям 8, вычисляют фазовую поправку бортового приемника для каждого из спутников с компенсацией ухода временной шкалы бортового приемника 10, обнаруживают скачки фазовых измерений бортового приемника 12, компенсируют скачки фазовых измерений бортового приемника 14, проводят коррекцию псевдодальностей бортового приемника с учетом компенсированных значений фазовых скачков 16, формируют уточненные значения псевдодальностей бортового приемника 18, производят прием уточненных дифференциальных поправок 6, по упомянутым уточненным значениям бортовых псевдодальностей и уточенным дифференциальным поправкам проводят вычисление итоговых псевдодальностей 20, по которым формируют отклонения уточненных координат ЛА от заданной глиссады 21.
Современные приемники, как правило, выполняются с выходами фазовых измерений [13].
Определение наземных 7 и бортовых 8 псевдодальностей по фазовым измерениям выполняется наземным и бортовым приемниками.
После определения наземных и бортовых псевдодальностей по фазовым измерениям вычисляют (9, 10) фазовые поправки с компенсацией ухода временных шкал наземного и бортового приемников методом вычитания среднего значения фазовых поправок, рассмотренным, например, в [9].
С целью обнаружения скачков фазовых измерений (11, 12) наземного и бортового приемников может быть использован известный алгоритм, основанный на обнаружении скачков фазовых измерений в «скользящем окне» на шкале времени, предлагаемый в [6, 9].
Как отмечалось выше, известный способ обнаружения скачков фазовых измерений, описанный в [6, 9], обладает существенными недостатками. Предлагается для обнаружения упомянутых скачков использовать отказоустойчивый нелинейный фильтр калмановской структуры с классификацией измерений [10]. Для этого вычисляется первая разность фазовой поправки dyi(k) на k-ом временном шаге для i-го спутника:

где yi(k) - фазовая поправка, определяемая как разность между дальностью до i-го спутника (i=1…N) и фазовым измерением псевдодальности с компенсацией временной шкалы приемника [3].
Обнаружение скачка в фазовом измерении каждого спутника сводиться к сравнению первой разности фазовой поправки dyi(k) с двумя изменяющимися порогами выявления (обнаружения) ±ψпор,i(k), определяемыми по методике [10]. При этом если величина dyi(k) попадает в область  то принимается решение об отсутствии скачка, в противном случае принимается решение о наличии скачка фазового измерения. После принятия решения о наличии или отсутствии скачка в фазовом измерении по методике [10] рассчитываются параметры упомянутого фильтра калмановской структуры с классификацией измерений.
то принимается решение об отсутствии скачка, в противном случае принимается решение о наличии скачка фазового измерения. После принятия решения о наличии или отсутствии скачка в фазовом измерении по методике [10] рассчитываются параметры упомянутого фильтра калмановской структуры с классификацией измерений.
Компенсацию выявленных скачков фазовых измерений (13, 14) наземного и бортового приемников проводят, вычисляя для каждого i-го спутника суммарную поправку ϑi(k), используемую для уточнения текущего фазового измерения Yi(k) в соответствии с формулами:


где Yfi(k) - компенсированное фазовое измерение i-го спутника. Начальное значение суммарной поправки ϑi(0)=0 изменяется после появления скачка по формуле (2), запоминаясь в переменной ϑi(k), и смещает значение текущего фазового измерения Yi(k) в соответствии с (3).
Производят коррекцию псевдодальности (15, 16) наземного и бортового приемников, вычисляя сглаживающую поправку Δxi(k) i-ой псевдодальности [3]:

где k -дискретное время, В - весовой коэффициент, Zi(k-1) -уточненное значение i-ой псевдодальности на k-1 шаге, учитывающее кодовое и фазовое измерения, ΔYi(k)=Yi(k)-Yi(k-1) - приращение i-ых фазовых измерений Yi(k).
По кодовым измерениям псевдодальности Xi(k) формируют уточненное значение псевдодальности наземного 17 и бортового приемников 18:

По уточненным значениям псевдодальностей наземного приемника на ЛККС вычисляют уточненные дифференциальные поправки (по методике [11]) и транслируют их на борт ЛА в общем пакете информации совместно с координатами заданной глиссады (по методике [3, 11]).
На борту производят прием уточненных дифференциальных поправок, по которым совместно с упомянутыми уточненными значениями бортовых псевдодальностей проводят вычисление итоговых псевдодальностей и формируют отклонения уточненных координат летательного аппарата от заданной глиссады (по методике [3, 11]).
Использование новых операций позволяет повысить точность вычисления координат ЛА и достоверность их определения. Для определения координат ЛА необходимо решать так называемую навигационную задачу. При решении навигационной задачи по методу наименьших квадратов [13] на каждом итерационном шаге формируется следующая оценка приращения координат

где S - проекционная матрица, ΔZ - N-мерный вектор отклонений псевдодальностей.
Вектор отклонений псевдодальностей ΔZ при формировании уточненных значений псевдодальностей может содержать скачки фазы. Исследования показывают, что коэффициент передачи скачка в координату высоты ЛА может достигать 3,7 [12], т.е. при скачке фазового измерения, например, в 1 м ошибка измерения высоты составит 3,7 м. Отметим также, что алгоритм контроля целостности системы посадки [11] не учитывает наличие ошибок, создаваемых скачками фазовых измерений. Таким образом, при скачке измеряемой координаты (высоты) предупреждение о снижаемой точности не вырабатывается.
Благодаря предложенному способу устраняются скачки в координатах ЛА и повышается их точность.
Система посадки, реализующая заявленный способ, представлена на Фиг.2 и содержит: N спутников с известными координатами 22, наземную аппаратуру, включающую ЛККС, содержащую наземный приемник 23, входом сопряженный с наземной антенной спутниковых сигналов 24 и имеющий выход кодовых измерений псевдодальностей, передатчик линии передачи данных 25, вход которого соединен с выходом наземной базы данных 26, бортовую аппаратуру, включающую бортовой приемник 33, входом сопряженный с бортовой антенной спутниковых сигналов 34 и имеющий выход кодовых измерений псевдодальностей, приемник линии передачи данных 35.
Наземный 23 и бортовой 33 приемники выполнены с выходами фазовых измерений псевдодальностей и в наземную и бортовую аппаратуру введены соответственно наземный 27 и бортовой 36 вычислители фазовых поправок, наземный 28 и бортовой 37 обнаружители скачков фазовых измерений, наземный 29 и бортовой 38 вычислители компенсированных значений фазовых измерений псевдодальностей, наземный 30 и бортовой 39 вычислители сглаживающих поправок псевдодальности, наземный 31 и бортовой 40 вычислители уточненных значений псевдодальностей, и также в наземную аппаратуру введен вычислитель уточненных дифференциальных поправок 32, а в бортовую аппаратуру введены бортовой вычислитель итоговой псевдодальности 41, вычислитель отклонений уточненных координат ЛА от заданной глиссады 42.
В системе реализованы новые структурные связи.
Выход фазовых измерений псевдодальности наземного приемника 23 соединен с первым входом наземного вычислителя фазовых поправок 27, на второй вход которого поступает информация о координатах ЛККС, выход которого соединен с входом наземного обнаружителя скачков фазовых измерений 28, выход которого соединен с входом наземного вычислителя компенсированных значений фазовых измерений псевдодальностей 29, выход которого соединен с входом наземного вычислителя сглаживающих поправок псевдодальностей 30, выход которого соединен с первым входом наземного вычислителя уточненных значений псевдодальностей 31, второй вход которого соединен с выходом кодовых измерений псевдодальностей наземного приемника 23, выход упомянутого вычислителя соединен с входом наземного вычислителя уточненных дифференциальных поправок 32, выход которого соединен со вторым входом передатчика линии передачи данных 25. На борту выход фазовых измерений псевдодальностей бортового приемника 33 соединен с первым входом бортового вычислителя фазовых поправок 36, на второй вход которого поступает информация о координатах ЛА, выход которого соединен с входом бортового обнаружителя скачков фазовых измерений 37, выход которого соединен с входом бортового вычислителя компенсированных значений фазовых измерений псевдодальностей 38, выход которого соединен с входом бортового вычислителя сглаживающих поправок псевдодальностей 39, выход которого соединен с первым входом бортового вычислителя уточненных значений псевдодальностей 40, второй вход которого соединен с выходом кодовых измерений псевдодальностей бортового приемника 33, выход упомянутого вычислителя соединен с первым входом бортового вычислителя итоговых псевдодальностей 41, второй вход которого соединен с первым выходом приемника линии передачи данных, выход бортового вычислителя итоговых псевдодальностей соединен с первым входом вычислителя отклонений уточненных координат летательного аппарата от заданной глиссады, второй вход которого соединен с вторым выходом приемника линии передачи данных 35. Информация о координатах ЛА поступает, например, от имеющейся на борту ИНС.
Система посадки работает следующим образом.
Аналогично системе-прототипу [8] на ЛККС и на борту ЛА осуществляется прием спутниковых сигналов наземным 23 и бортовым 33 приемниками, сопряженными с наземной 24 и бортовой 34 антеннами, и определение кодовых измерений псевдодальностей в наземном и бортовом приемниках. Заданные координаты глиссады, поступающие из наземной базы координат заданной глиссады 26, через передатчик ЛПД 25 передаются на борт ЛА. Прием координат заданной глиссады осуществляется приемником ЛПД 35.
Новизна функционирования состоит в следующем.
На второй вход передатчика ЛПД 25 поступает дифференциальная информация, формируемая в ЛККС и определяемая в вычислителе 32 по уточненным псевдодальностям наземного приемника. Определение уточненных псевдодальностей наземного приемника производится в вычислителе 31, на входы которого поступают кодовые измерения псевдодальностей от наземного приемника 23 и сглаживающие поправки псевдодальностей наземного приемника. Формирование сглаживающих поправок псевдодальностей наземного приемника в вычислителе 30 осуществляется с использованием фазовых измерений, в которых компенсированы фазовые скачки. Использование фазовых измерений с компенсированными скачками позволяет повысить точность формируемых дифференциальных поправок. В вычислителе 29 выполняется компенсация скачков фазовых измерений наземного приемника, выявленных в обнаружителе 28. Фазовые измерения являются быстро изменяющимся процессами, поэтому обнаружение скачков удобнее производить в фазовых поправках, формируемых в вычислителе 27.
В бортовом оборудовании параллельно и аналогично с наземным оборудованием производиться вычисление фазовых поправок в вычислителе 36. Выявление скачков фазовых измерений псевдодальностей, бортового приемника производится в обнаружителе 37. Вычислитель уточненных значений псевдодальностей 40 использует сглаживающие поправки псевдодальностей, формируемые в вычислителе 39 с учетом компенсированного значения фазовых скачков 38, и кодовых измерений бортового приемника 33. Определение итоговых псевдодальностей выполняется в вычислителе 41, в который поступают значения уточненных дифференциальных поправок из приемника ЛПД 35 и уточненные значения псевдодальностей из 40. Из вычислителя 41 итоговые псевдодальности поступают в вычислитель 42, где производится определение отклонений уточненных координат от заданной глиссады, получаемых из приемника ЛПД 42.
Введение блоков, определяющих и обрабатывающих уточненные дифференциальные поправки, и их использование в системе посадки в совокупности с известными блоками, обрабатывающими сигналы спутников, и блоками линии передачи данных, и введенными блоками, вычисляющими уточненные значения псевдодальностей наземного и бортового приемников, благодаря учету фазовых составляющих измерений псевдодальностей с обнаружением и коррекцией скачков, реализуют предложенный способ посадки и позволяют существенно повысить точность определяемых координат ЛА и достоверность их определения.
При отработке способа и испытаниях системы в качестве бортовых и наземных приемников использовались приемные модули типа «JNS100» и «Legacy» фирмы «Javad GNSS», выполненные с кодовыми и фазовыми выходами. В качестве вычислительных устройств использовались стандартные модули типа СМ420 фирмы «Ampro». В качестве ЛПД использовалась серийно выпускаемая аппаратура «ЛККС-А-2000» производства фирмы «СПЕКТР».
Результаты испытаний показали, что использование предложенных способа и системы повышает на 35-40% точность определения координат при выполнении посадки ЛА.
Литература
1. Сетевые спутниковые радионавигационные системы [Текст] / П.П.Дмитриев [и др.]; отв. ред. В.С.Шебшаевич. - 2-е изд. - М.: Радио и связь, 1993. - 408 с.: ил.
2. Патент США №5361212, кл. G01S 5/00 заявл. 11.02.92 г., опубл. 01.11.1994 г.
3. RTCA DO-245A, Minimum Aviation System Performance Standards for Local Area Augmentation System (LAAS) [Electronic resource] // Radio Technical Commission for Aeronautics, December 9, 2004. - Режим доступа: http://www.rtca.org/doclist.asp.
4. Патент США №6,469,663 В 1, кл. G01S 5/02, завл. 24.10.2000 г. опубл. 22.10.2002.
5. Патент США №006,166,683, кл. G01S 5/02, завл. 19.12.1998 г. опубл. 26.12.2000.
6. Соколов А.И. Контроль фазовых измерений в опорных приемниках наземных систем локальных функциональных дополнений GPS/Глонасс / Соколов А.И., Чистякова С.С. // Изв. СПбГЭТУ «ЛЭТИ» /СПбГЭТУ «ЛЭТИ»,- 2006,-Вып.2: Радиоэлектроника и телекоммуникации.-С.27-32.
7. C.Altmayer, Cycle Detection And Correction by Means of Integrated System // ION NMT 2000, Anaheim, CA.
8. Патент Японии №3 379 958 В2 8503069 А, кл. G01S5/02 заявл. 02.11.1993 г., опубл. 24.02.2003 г.
9. Normark, P. и др. The Next Generation Integrity Monitor Testbed (IMT) for Ground System Development and Validation Testing Presented Sep 2001 at the Institute of Navigation's GPS Conference, Salt Lake City, UT.
10. Гришин Ю.П., Казаринов Ю.М. Динамические системы, устойчивые к отказам / М.: Радио и связь, 1985. - 176 с.
11. Приложение 10 к Конвенции о международной гражданской авиации. Авиационная электросвязь. Том1, Изд. Шестое, Июль 2006 г. - Режим доступа: http://www.icao.org/.
12. Чистякова С.С.Исследование влияния перескоков фазовых измерений на ошибки определения координат воздушного судна в инструментальной дифференциальной спутниковой системе посадки. // 62-я Научно техническая конференция, посвященная дню радио. Труды конференции. Апр. 2007 г. // СПб. Изд-во СПБГЭТУ «ЛЭТИ».
13. Р.В. Бакитько и др. ГЛОНАСС.Принципы построения и функционирования / Под, ред. Ф.И.Перова, В.Н.Харисова. Изд. 3-е - Радиотехника, 2005, 688 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И СИСТЕМА ПОСАДКИ НА ЕГО ОСНОВЕ | 2007 |
|
RU2331901C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2385469C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ И ПОСАДКИ | 2002 |
|
RU2236020C2 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СИСТЕМА ВЫСОКОТОЧНОЙ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2287838C2 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ПОСАДКИ С ИСПОЛЬЗОВАНИЕМ ПСЕВДОСПУТНИКОВ | 2010 |
|
RU2439617C1 |
| СПОСОБ ПОВЫШЕНИЯ ЦЕЛОСТНОСТИ ИСПОЛЬЗУЕМЫХ СИГНАЛОВ НАВИГАЦИОННЫХ СПУТНИКОВ С ПОМОЩЬЮ ЛОКАЛЬНОЙ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ (ЛККС) С УЧЕТОМ ВЛИЯНИЯ АНОМАЛЬНОЙ ИОНОСФЕРЫ | 2013 |
|
RU2542326C1 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |

Изобретение относится к области навигации летательных аппаратов (ЛА) и может быть использовано при осуществлении посадки ЛА. Достигаемым техническим результатом является повышение точности определения координат ЛА. Указанный результат достигается за счет того, что определяют текущие координаты ЛА по ориентации относительно нескольких спутников с известными координатами, для чего производят прием сигналов спутников с помощью бортового приемника, определяют бортовые псевдодальности путем кодовых измерений, одновременно производят прием сигналов спутников на локальной контрольно-корректирующей станции (ЛККС) с известным местоположением с помощью наземного приемника, определяя наземные псевдодальности путем кодовых измерений, транслируют координаты заданной глиссады на борт летательного аппарата в общем пакете информации через линию передачи данных, а на борту производят прием координат заданной глиссады. Кроме того, на ЛККС и на борту ЛА, соответственно, для наземного и бортового приемников одновременно с кодовыми измерениями наземных и бортовых псевдодальностей проводят фазовые измерения упомянутых псевдодальностей путем определения фазы несущей частоты сигналов спутников, вычисляют фазовую поправку фазового измерения псевдодальности для каждого спутника с компенсацией ухода временной шкалы наземного и бортового приемников, далее выявляют скачки фазового измерения наземного и бортового приемников для каждого спутника, производят компенсацию упомянутых скачков фазовых измерений, производят коррекцию псевдодальностей с учетом компенсации скачков фазовых измерений псевдодальностей, формируют уточненные значения наземных и бортовых псевдодальностей. По уточненным значениям наземных псевдодальностей определяют уточненные дифференциальные поправки, транслируют уточненные дифференциальные поправки на борт ЛА в общем пакете информации совместно с координатами заданной глиссады, а на борту производят прием уточненных дифференциальных поправок, по упомянутым уточненным значениям бортовых псевдодальностей и уточенным дифференциальным поправкам проводят вычисление итоговых псевдодальностей, по которым формируют отклонения уточненных координат летательного аппарата от заданной глиссады. Предлагается система посадки, использующая предложенный способ. 2 н. и 2 з.п. ф-лы, 2 ил.
1. Способ посадки летательных аппаратов с использованием спутниковой навигационной системы, состоящий в том, что определяют текущие координаты летательного аппарата по ориентации относительно нескольких спутников с известными координатами, для чего производят прием сигналов спутников с помощью бортового приемника, определяют бортовые псевдодальности путем кодовых измерений, одновременно производят прием сигналов спутников на локальной контрольно-корректирующей станции с известным местоположением с помощью наземного приемника, определяя наземные псевдодальности путем кодовых измерений, транслируют координаты заданной глиссады на борт летательного аппарата в общем пакете информации через линию передачи данных, а на борту производят прием координат заданной глиссады, отличающийся тем, что на локальной контрольно-корректирующей станции и на борту летательного аппарата соответственно для наземного и бортового приемников одновременно с кодовыми измерениями наземных и бортовых псевдодальностей проводят фазовые измерения упомянутых псевдодальностей путем определения фазы несущей частоты сигналов спутников, вычисляют по фазовому измерению фазовую поправку измерения псевдодальности для каждого спутника с компенсацией ухода временной шкалы наземного и бортового приемников, далее выявляют скачки фазовых измерений наземного и бортового приемников для каждого спутника, производят компенсацию упомянутых скачков фазовых измерений, производят коррекцию псевдодальностей с учетом компенсации скачков фазовых измерений псевдодальностей, формируют уточненные значения наземных и бортовых псевдодальностей, по уточненным значениям наземных псевдодальностей определяют уточненные дифференциальные поправки, транслируют уточненные дифференциальные поправки на борт летательного аппарата в общем пакете информации совместно с координатами заданной глиссады, а на борту производят прием уточненных дифференциальных поправок, по упомянутым уточненным значениям бортовых псевдодальностей и уточенным дифференциальным поправкам проводят вычисление итоговых псевдодальностей, по которым формируют отклонения уточненных координат летательного аппарата от заданной глиссады.
2. Способ по п.1, отличающийся тем, что на земле и на борту выявление скачков фазового измерения каждого спутника производят путем формирования первой разности фазовой поправки с последующей фильтрацией путем сопоставления текущей величины первой разности фазовой поправки с взвешенной суммой предыдущих значений первой разности фазовой поправки.
3. Способ по п.1, отличающийся тем, что для компенсации выявленных скачков фазовых измерений псевдодальностей, имеющих место для одного или нескольких спутников, вычисляют разности между текущими значениями первой разности фазовой поправки каждого спутника и средним арифметическим текущих значений первой разности всех спутников, на основе которых определяют суммарную поправку, которую суммируют со значением фазовых измерений псевдодальностей.
4. Система посадки летательных аппаратов с использованием спутниковой навигационной системы, содержащая N спутников с известными координатами, наземную аппаратуру, включающую локальную контрольно-корректирующую станцию с, по крайней мере, одним приемником, входом сопряженным с наземной антенной спутниковых сигналов и имеющим выход кодовых измерений псевдодальностей, передатчик линии передачи данных, вход которого соединен с выходом наземной базы данных, бортовую аппаратуру, включающую бортовой приемник, входом сопряженный с бортовой антенной спутниковых сигналов и имеющий выход кодовых измерений псевдодальностей, приемник линии передачи данных, отличающаяся тем, что наземный и бортовой приемники выполнены с выходами фазовых измерений псевдодальностей, в наземную и бортовую аппаратуру введены соответственно наземный и бортовой вычислители фазовых поправок, наземный и бортовой обнаружители скачков фазовых измерений, наземный и бортовой вычислители компенсированных значений фазовых измерений псевдодальностей, наземный и бортовой вычислители сглаживающих поправок псевдодальностей, наземный и бортовой вычислители уточненных значений псевдодальностей, и также в наземную аппаратуру введен вычислитель уточненных дифференциальных поправок, а в бортовую аппаратуру введены бортовой вычислитель итоговых псевдодальностей, вычислитель отклонений уточненных координат летательного аппарата от заданной глиссады, при этом выход фазовых измерений псевдодальностей наземного приемника соединен с первым входом наземного вычислителя фазовых поправок, на второй вход которого поступает информация о координатах локальной контрольно-корректирующей станции, выход которого соединен с входом наземного обнаружителя скачков фазовых измерений, выход которого соединен с входом наземного вычислителя компенсированных значений фазовых измерений псевдодальностей, выход которого соединен с входом наземного вычислителя сглаживающих поправок псевдодальностей, выход которого соединен с первым входом наземного вычислителя уточненных значений псевдодальностей, второй вход которого соединен с выходом кодовых измерений псевдодальностей наземного приемника, выход упомянутого вычислителя соединен с входом наземного вычислителя уточненных дифференциальных поправок, выход которого соединен со вторым входом передатчика линии передачи данных, а на борту выход фазовых измерений псевдодальностей бортового приемника соединен с первым входом бортового вычислителя фазовых поправок, на второй вход которого поступает информация о координатах летательного аппарата, выход которого соединен с входом бортового обнаружителя скачков фазовых измерений, выход которого соединен с входом бортового вычислителя компенсированных значений фазовых измерений псевдодальностей, выход которого соединен с входом бортового вычислителя сглаживающих поправок псевдодальностей, выход которого соединен с первым входом бортового вычислителя уточненных значений псевдодальностей, второй вход которого соединен с выходом кодовых измерений псевдодальностей бортового приемника, выход упомянутого вычислителя соединен с первым входом бортового вычислителя итоговых псевдодальностей, второй вход которого соединен с первым выходом приемника линии передачи данных, выход бортового вычислителя итоговых псевдодальностей соединен с первым входом вычислителя отклонений уточненных координат летательного аппарата от заданной глиссады, второй вход которого соединен с вторым выходом приемника линии передачи данных, при этом информация о координатах летательного аппарата поступает, например, от имеющейся на борту инерциальной навигационной системы.
| СИСТЕМА ВЫСОКОТОЧНОЙ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2287838C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТОВ В ПРОСТРАНСТВЕ, ДАЛЬНОСТИ, ПЕЛЕНГА, КООРДИНАТ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2152625C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ И ПОСАДКИ | 2002 |
|
RU2236020C2 |
| СПОСОБ ГРУППОВОЙ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1997 |
|
RU2130622C1 |
| US 6799094 B1, 28.09.2004 | |||
| US 5995043 A, 30.11.2002 | |||
| РЕГУЛЯТОР РАСХОДА ТЕКУЧЕЙ СРЕДЫ | 1995 |
|
RU2099769C1 |
| US 2004225432 A1, 11.11.2004. | |||

