Настоящее изобретение относится к способу и устройству для выполнения по меньшей мере одного полетного испытания на летательном аппарате, способу для выполнения протокола из множества испытаний, а также методике для идентификации аэродинамических явлений на летательном аппарате с использованием такого способа.
Область применения изобретения относится к идентификации механики полета летательного аппарата, то есть сравнению реальных движений летательного аппарата с их исполнением по модели, а также, если уместно, корректировке параметров модели, используемой для достижения оптимальной точности этой модели.
Таким образом реализован протокол испытаний, который, в целом, указывает способ для выполнения полетных испытаний для определенного назначения. Для этой цели ряд заранее определенных последовательностей аэродинамических профилей определен обычным образом. В случае механики полета протокол обычным образом состоит из полетных испытаний, выполняемых на летательном аппарате исключительно при отсутствии обратной связи, то есть никакая система управления положением летательного аппарата в пространстве не вовлечена в ход этих испытаний. В конкретном случае, где летательный аппарат по сути неустойчив, предусматривается просто система управления, которая ограничена минимальным стабилизатором. Протоколы выполняются в виде испытательных мероприятий. В ходе этих испытаний, заранее определенные последовательности управляющих воздействий применяют к летательному аппарату. Управляющие воздействия, а также результирующие выходные сигналы измеряют на летательном аппарате и регистрируют. Их эмпирически обрабатывают. Реальные управляющие воздействия, измеряемые на летательном аппарате в ходе осуществляемых в полете испытаний, повторно прогоняются на имитационной модели. Реальные выходные сигналы, измеренные на летательном аппарате, после этого сравнивают с выходными сигналами из имитационной модели. Затем может быть выполнена регистрация определенных результатов. Качество (точность, и т.п.) идентификации (механики полета) зависит от качества (точности, и т.п.) каждого из вышеупомянутых этапов. Будет отмечено, что настоящее изобретение по существу имеет отношение к усовершенствованию первого этапа, а именно протокола испытаний.
Как отмечено ранее, основная характеристика обычного протокола испытаний заключается в том обстоятельстве, что он состоит из полетных испытаний, выполняемых полностью при отсутствии обратной связи, при системах управления положением в пространстве летательного аппарата, выведенных из работы. Входные команды в ходе каждого испытания отправляют непосредственно на аэродинамические профили автоматическим образом независимо от движений летательного аппарата.
Эти команды аэродинамических профилей все определены в стробируемом виде и дают возможность выведения из равновесия летательного аппарата.
Будет отмечено, что протокол испытаний предписывает аэродинамические профили, которые будут требоваться в полете во время испытаний, уровень отклонения, которому будут подвергать эти аэродинамические профили, продолжительность отклонения, а также точка полета, в которой будут выполнять испытания.
Однако с таким обычным протоколом испытаний и несмотря на то, что применяемые управляющие воздействия различны в каждом испытании, все выходные кривые демонстрируют сходную динамику. Более тщательный анализ дает возможность продемонстрировать, что реакция летательного аппарата подчиняется доминирующей моде, которая препятствует возможности различать другие явления из механики полета летательного аппарата. Эта доминирующая мода имеет место во всех выходах. Таким образом, все аэродинамические эффекты являются коррелированными. Эта доминирующая мода препятствует наблюдаемости всех эффектов. Более конкретно, эта доминирующая мода соответствует комбинации аэродинамических эффектов и препятствует возможности точного разделения различных эффектов и характеристики их по отдельности. Следовательно, входные сигналы в отношении летательного аппарата в ходе такого обычного протокола испытаний недостаточны для идентификации аэродинамических явлений летательного аппарата.
Цель настоящего изобретения состоит в том, чтобы произвести всеобъемлющее улучшение наблюдаемости различных явлений механики полета, чтобы получить лучшее качество вышеупомянутой регистрации и/или снижение продолжительности полетных испытаний, которые используют для идентификации модели механики полета.
Будет отмечено, что стало необходимым увеличить наблюдаемость определенных эффектов с тем, чтобы улучшить стандартные методики для идентификации аэродинамических явлений. Более того, сокращение цикла испытательных мероприятий дает возможность ограничить понесенные затраты. Эта последняя цель может достигаться уровнем экспериментальных протоколов посредством снижения длительности полетных испытаний. Следовательно, настоящее изобретение, в частности, направлено на идентификацию явления механики полета более точным образом, на основе протокола, содержащего уменьшенное число испытаний.
Таким образом, настоящее изобретение прежде всего относится к способу для выполнения по меньшей мере одного полетного испытания на летательном аппарате, в частности транспортном самолете.
Согласно изобретению упомянутый способ, согласно которому:
a) вырабатывают по меньшей мере одну команду отклонения, которая должна подаваться на по меньшей мере один аэродинамический профиль летательного аппарата;
b) упомянутую команду отклонения подают в ходе полета упомянутого летательного аппарата на упомянутый аэродинамический профиль, который способен отклоняться так, чтобы действовать по меньшей мере по одной оси пилотирования летательного аппарата и который содержит по меньшей мере один привод для отклонения упомянутого аэродинамического профиля, как в качестве функции по меньшей мере одной команды отклонения, упомянутая команда отклонения иллюстрирует постепенное изменение отклонения, как функции времени;
c) измеряют по меньшей мере одну выходную кривую,
иллюстрирующую постепенное изменение, как функции времени, движения летательного аппарата в ответ на подачу упомянутой команды отклонения на аэродинамический профиль в ходе полета;
d) регистрируют команду отклонения, поданную на аэродинамический профиль, и измеренную соответствующую выходную кривую,
характеризуется тем, что:
- на этапе a):
- принимают по меньшей мере одну выходную рабочую точку, дающую возможность получать по меньшей мере одну выходную кривую, которая является идентифицирующей для по меньшей мере одного аэродинамического эффекта летательного аппарата;
- вырабатывают по меньшей мере одну команду отклонения аэродинамического профиля, которая вызвана упомянутой принятой выходной рабочей точкой;
- ведут летательный аппарат в полете так, чтобы получать и поддерживать на упомянутом летательном аппарате упомянутую идентифицирующую выходную кривую в ходе применения упомянутой команды отклонения, вызванной упомянутым заданным выходным сигналом.
Таким образом, в силу изобретения входной сигнал (испытания) модифицируют, чтобы получать по меньшей мере одну команду отклонения аэродинамического профиля, которая способна к отделению по меньшей мере одного конкретного аэродинамического эффекта по отношению к другим во временной реакции или реакциях, собранных в качестве выходного сигнала в полетном испытании. Это получают принятием в расчет заданного выходного сигнала, который иллюстрирует выходную рабочую точку, дающую возможность делать по меньшей мере один аэродинамический эффект более распознаваемым, то есть дающую возможность отдельно изолировать упомянутый аэродинамический эффект так, чтобы обеспечить возможность вывода из него его характеристики. Таким образом, выходной сигнал изменяют постепенно уже не согласно доминирующей моде, как указано выше, а согласно регулируемому постепенному изменению.
В предпочтительном варианте осуществления, на этапе a), также принимают по меньшей мере одну команду отклонения аэродинамического профиля, которую подают как есть на упомянутый аэродинамический профиль.
Таким образом, в ходе испытаний учитывают по меньшей мере одну обычную команду отклонения, которая непосредственно управляет аэродинамическим профилем, и по меньшей мере одну команду отклонения, вызванную выходной рабочей точкой, которая регулирует выход.
Предпочтительно для формирования команды отклонения, представляющей выходной рабочей точкой, и выполнения ведения используют средство, которое сформировано на основе так называемой теории модального управления, описанной ниже.
Дополнительно, полезным образом для выполнения испытания упомянутые этапы с a) по d) и упомянутую подстройку реализуют для множества разных аэродинамических профилей летательного аппарата.
Настоящее изобретение также относится к устройству для выполнения по меньшей мере одного испытания на летательном аппарате, в частности самолете.
Согласно изобретению упомянутое устройство типа, содержащего:
- по меньшей мере один аэродинамический профиль летательного аппарата, способный отклоняться так, чтобы действовать по меньшей мере по одной оси пилотирования летательного аппарата в ходе полета, и содержащий по меньшей мере один привод для отклонения упомянутого аэродинамического профиля, как функции по меньшей мере одной принятой команды отклонения, которая иллюстрирует постепенное изменение отклонения, как функции времени;
- устройство управления для передачи на упомянутый привод по меньшей мере одной команды отклонения, которая должна подаваться на упомянутый аэродинамический профиль;
- средство для измерения по меньшей мере одной выходной кривой, иллюстрирующей постепенное изменение, как функции времени, движение летательного аппарата в ответ на подачу в полете команды отклонения на аэродинамический профиль;
- средство для регистрации по меньшей мере одной команды отклонения, поданной на аэродинамический профиль и измеренной соответствующей выходной кривой,
характеризуется тем, что упомянутое устройство управления содержит:
- по меньшей мере одно первое средство, способное к приему по меньшей мере одной выходной рабочей точки, дающей возможность получать по меньшей мере одну выходную кривую, которая является идентифицирующей для по меньшей мере одного аэродинамического эффекта летательного аппарата;
- по меньшей мере одно второе средство для формирования по меньшей мере одной команды отклонения аэродинамического профиля, которая вызывается упомянутой выходной рабочей точкой, переданной упомянутым первым средством;
- упомянутое устройство, кроме этого, содержит по меньшей мере одно средство ведения для ведения летательного аппарата так, чтобы получать и поддерживать на упомянутом летательном аппарате упомянутую идентифицирующую выходную кривую, когда соответствующая команда отклонения, сформированная упомянутым вторым средством, подается на аэродинамический профиль.
Таким образом, в силу упомянутого средства ведения устройство в соответствии с изобретением дает возможность выполнять испытание с обратной связью.
В предпочтительном варианте осуществления упомянутое устройство управления, кроме этого, содержит третье средство для приема по меньшей мере одной команды отклонения аэродинамического профиля, которая передается как есть на привод аэродинамического профиля.
Кроме того, предпочтительно упомянутый аэродинамический профиль соответствует одному из следующих элементов летательного аппарата:
- интерцептору;
- элерону;
- хвостовому стабилизатору;
- рулю высоты;
- стабилизатору.
Настоящее изобретение также относится к способу для выполнения протокола из n испытаний на летательном аппарате.
Согласно изобретению этот способ характеризуется тем, что:
- на подготовительном этапе (перед пробным полетом) определяются m команд отклонения аэродинамического профиля, которые должны применяться непосредственно к летательному аппарату, и p выходных рабочих точек, которые дают возможность отделять по меньшей мере один аэродинамический эффект летательного аппарата во временной реакции последнего, которая иллюстрирует по меньшей мере одну выходную кривую, m и p являются целыми числами, такие, что m+p=n;
- n испытаний выполняют, в ходе по меньшей мере последующего (пробного) полета летательного аппарата посредством применения, соответственно, упомянутых m команд отклонения и упомянутых p выходных рабочих точек, последние также подают в виде типичных команд отклонения, упомянутые n испытаний выполняют по меньшей мере частично посредством реализации вышеупомянутого способа в соответствии с изобретением или посредством использования вышеупомянутого устройства в соответствии с изобретением;
- для каждого из упомянутых n испытаний регистрируют подаваемую команду отклонения и измеряют и регистрируют q соответствующих выходных кривых, q является целым числом.
Дополнительно, настоящее изобретение также относится к процедуре для идентификации аэродинамических явлений на летательном аппарате с помощью имитатора полета, а именно методики, согласно которой:
A/ выполняют по меньшей мере один протокол из n осуществляемых в полете испытаний, n является целым числом, дающий возможность получать множество n реальных входных кривых, представляющих команды отклонения, реально применяемые к летательному аппарату, и множество ассоциативно соответствующих реальных выходных кривых;
B/ упомянутые n реальных входных кривых подают на упомянутый имитатор полета;
C/ соответствующие выходные кривые, полученные в ответ на применение упомянутых n реальных входных кривых, измеряют на упомянутом имитаторе полета;
D/ упомянутые реальные выходные кривые и упомянутые соответствующие выходные кривые, порожденные упомянутым имитатором полета, попарно сравнивают;
E/ уточняют имитационную модель, используемую упомянутым имитатором полета, на основе этого сравнения.
Согласно изобретению эта методика идентификации характеризуется тем, что на этапе A/ реализуют вышеупомянутый способ в соответствии с изобретением, который предназначен для выполнения протокола n полетных испытаний.
Единственный прилагаемый чертеж иллюстрирует способ, которым может быть осуществлено изобретение. Этот чертеж является схематическим представлением устройства в соответствии с изобретением.
Устройство 1 в соответствии с изобретением и схематически представленное на чертеже предназначено для выполнения по меньшей мере одного полетного испытания на летательном аппарате (не представлен), в частности транспортном самолете.
Таким образом, упомянутое устройство 1 содержит:
- по меньшей мере один обычный аэродинамический профиль 2A, 2B,…, 2n летательного аппарата, который способен к отклонению в полете так, чтобы действовать по меньшей мере по одной оси пилотирования (поворота, крена, наклона) летательного аппарата. Этот аэродинамический профиль 2A, 2B,…, 2n содержит по меньшей мере один обычный привод 3A, 3B,…, 3n для отклонения упомянутого аэродинамического профиля 2A, 2B,…, 2n, как функции по меньшей мере одной принятой команды отклонения. Команда отклонения определена в рамках настоящего изобретения кривой, представляющей постепенное изменение амплитуды отклонения, как функции времени;
- устройство 4 управления, которое присоединено посредством по меньшей мере одной линии 5A, 5B,…, 5n связи (формирующей часть основной линии 5 связи) к упомянутому приводу 3A, 3B,…, 3n и которое выполнено так, чтобы передавать на упомянутый привод 3A, 3B,…, 3n по меньшей мере одну команду отклонения, которая должна подаваться на упомянутый аэродинамический профиль 2A, 2B,…, 2n;
- обычное средство 6 для измерения по меньшей мере одной выходной кривой. В рамках настоящего изобретения выходная кривая иллюстрирует постепенное изменение, как функции времени, движения (бокового скольжения, поворота, крена, наклона, направления курса, коэффициента нагрузки, и т.п.) летательного аппарата в ответ на подачу в полете команды отклонения на аэродинамический профиль 2A, 2B,…, 2n;
- средство 7, которое присоединено посредством линий 8 и 9 связи соответственно к устройству 4 управления и средству 6, и которое предназначено для регистрации на обычном носителе записи (конкретно не представлен) по меньшей мере:
- команды отклонения, которая реально подается на аэродинамический профиль 2A, 2B,…, 2n посредством устройства 4 управления и привода 3A, 3B,…, 3n);
- соответствующей выходной кривой, которая измеряется средством 6.
Кроме того, согласно изобретению:
- упомянутое устройство 4 управления содержит:
- по меньшей мере одно средство 10, способное к приему по меньшей мере одной выходной рабочей точки, дающей возможность получать по меньшей мере одну выходную кривую, которая является идентифицирующей для по меньшей мере одного аэродинамического эффекта (бокового скольжения, поворота, крена, наклона, направления курса, коэффициента нагрузки, и т.п.) летательного аппарата. Это средство 10, например, может быть средством ввода, таким как, например, клавиатура, которая предоставляет оператору, в частности пилоту возможность вызывать предварительно записанную последовательность упомянутых выходных рабочих точек в упомянутом устройстве 4 управления;
- по меньшей мере одно средство 11, которое присоединено посредством линии 12 связи к упомянутому средству 10, которое воплощено в виде предварительного регулятора P и которое выполнено так, чтобы формировать по меньшей мере одну команду отклонения аэродинамического профиля, представляющую выходную рабочую точку, принятую из упомянутого средства 10. Упомянутая команда отклонения аэродинамического профиля предназначена, чтобы передаваться на привод 3A, 3B,…, 3n;
- упомянутое устройство 1, кроме того, содержит по меньшей мере одно средство 13 ведения, которое присоединено посредством линии 14 связи к устройству 4 управления, которое содержит корректор K и которое выполнено так, чтобы вести летательный аппарат с тем, чтобы получать и поддерживать на летательном аппарате идентифицированную выходную кривую, когда команда отклонения, соответствующая этой выходной кривой, которая сформирована средством 11, подается на аэродинамические профили 2A, 2B,…, 2n. Упомянутое средство 13 ведения может быть интегрировано по меньшей мере частично в состав упомянутого устройства 4 управления.
В конкретном варианте осуществления датчик средства ведения и средства 6 измерения может быть одним и тем же.
Таким образом, в силу изобретения, входной сигнал (испытания) модифицируется так, чтобы получать по меньшей мере одну команду отклонения аэродинамического профиля, которая способна к отделению по меньшей мере одного конкретного аэродинамического эффекта по отношению к другим во временной реакции или реакциях, собранных в качестве выходного сигнала в полетном испытании. Это достигается принятием в расчет выходной рабочей точки, который иллюстрирует выходную кривую, дающую возможность делать по меньшей мере один аэродинамический эффект более опознаваемым. Таким образом, выходной сигнал изменяется постепенно уже не согласно доминирующей моде, а согласно регулируемому постепенному изменению.
В рамках настоящего изобретения, выходная кривая считается идентифицирующей, если она дает возможность идентифицировать (то есть, определять или характеризовать) конкретный аэродинамический эффект летательного аппарата с помощью значений, измеренных и зарегистрированных средством 7 в ходе применения к летательному аппарату команды отклонения, которая является представляющей эту выходную кривую. Кроме того, считается, что эффект полностью опознаваем, если на основе эталонных графиков временной зависимости, являющихся результатом одного или нескольких испытаний по протоколу испытаний, возможно зарегистрировать все имитационные кривые в этом наборе эталонных графиков просто посредством изменения коэффициента, ассоциативно связанного в модели с этим аэродинамическим эффектом. Это свойство опознаваемости может быть обобщено до нескольких аэродинамических эффектов.
Упомянутое устройство 4 управления, кроме этого, содержит средство 15 для приема по меньшей мере одной прямой команды отклонения аэродинамического профиля, которая после этого передается как есть на привод 3A, 3B,…, 3n аэродинамического профиля 2A, 2B…, 2n без модификации. Отсюда упомянутое средство 15 может быть средством ввода, подобным или идентичным упомянутому средству 10.
В конкретном варианте осуществления упомянутый корректор K (который дает возможность выполнять испытания с обратной связью) и упомянутый предварительный регулятор P созданы на основе так называемой обычной теории модального управления. Эта теория иллюстрирует технологию синтеза алгоритма управления. Математические расчеты, которые дают возможность численным образом определять корректор K и предварительный регулятор P полагаются на изменение обычной динамики летательного аппарата, когда последний ведется корректором K и управляется предварительным регулятором P. Корректор K и предварительный регулятор P образуют контроллер.
Устройство 1 в соответствии с изобретением может быть выполнено так, чтобы управлять одиночным аэродинамическим профилем или чтобы одновременно управлять множеством аэродинамических профилей в ходе испытания. В качестве иллюстрации, аэродинамический профиль 2A, 2B,..., 2n, которым управляют, может соответствовать одному из следующих элементов летательного аппарата:
- интерцептору;
- элерону;
- хвостовому стабилизатору;
- рулю высоты;
- стабилизатору.
Предпочтительно устройство 1 в соответствии с изобретением предназначено для выполнения не одиночного испытания, а протокола из n испытаний на летательном аппарате.
Для выполнения такого протокола из n испытаний согласно изобретению реализуют следующие этапы:
- на подготовительном этапе определяют m команд отклонения аэродинамического профиля, которые должны применяться непосредственно к летательному аппарату, и p выходных рабочих точек, которые дают возможность отделять по меньшей мере один аэродинамический эффект летательного аппарата во временной реакции последнего, которая иллюстрирует по меньшей мере одну выходную кривую. Целые числа m и p являются такими, что m+p=n;
- n испытаний выполняют в ходе, по меньшей мере, последующего полета летательного средства, с помощью устройства 1 в соответствии с изобретением, посредством применения, соответственно, упомянутых m команд отклонения (принятых средством 15) и упомянутых p выходных рабочих точек (принятых средством 10), последние применяют в виде типичных команд отклонения, определенных средством 11; и
- для каждого из упомянутых n осуществляемых в полете испытаний по упомянутому протоколу испытаний:
- регистрируют применяемую команду отклонения с помощью средства 7 упомянутого устройства 1; и
- q ассоциативно соответствующих выходных кривых, которые также регистрируют с помощью упомянутого средства 7, измеряют с помощью средства 6 упомянутого устройства 1, q является целым числом.
Таким образом, на основании устройства 1 в соответствии с изобретением таковое больше не ограничено отправкой только обычных команд аэродинамических профилей на приводы 3A, 3B,…, 3n аэродинамических профилей. Определенные выходы летательного аппарата управляют и ведут к выходным рабочим точкам (определенным в ходе упомянутого подготовительного этапа). Эти выходные рабочие точки формируют так, чтобы они были потенциально идентифицирующими.
Опыт показывает, что в силу изобретения, в частности, получают следующие преимущества:
- прямая команда определенных состояний, проявляющаяся в качестве выходных сигналов, формирует реальные движения на всех аэродинамических профилях в один и тот же момент времени (подход с многочисленными аэродинамическими профилями);
- реальные выходные кривые (то есть те, которые реально получены в выходном сигнале) очень близки к выходным кривым, представляющим заданные выходные сигналы;
- прямая оптимизация достигается на по меньшей мере одной выходной кривой, тем самым давая возможность получать хорошую идентификацию по меньшей мере одного аэродинамического эффекта.
Отсюда устройство 1 в соответствии с настоящим изобретением, таким образом, выполняет следующие операции:
- ведение одного или нескольких выходных сигналов к (заданным значениям) командам, проявляющимся в качестве идентификаторов. Ведение обеспечивается корректором K. Его роль состоит в том, чтобы поддерживать летательный аппарат на соответствующей выходной кривой или выходных кривых;
- непосредственное управление летательным аппаратом уже не командами отклонения аэродинамических профилей, как в обычных протоколах, а командами, представляющими выходные рабочие точки, которые поэтому имеют отношение к выходным сигналам непосредственно. Таким образом, выходные сигналы по протоколу испытаний в соответствии с изобретением бывают двух типов: обычные отклонения аэродинамических профилей, имеющие отношение к аэродинамическим профилям 2A, 2B,…, 2n летательного аппарата, и команды выходных рабочих точек.
Это непосредственное управление согласно выходной кривой обеспечивается предварительным регулятором P, который преобразует требуемые выходные рабочие точки команды отклонения для аэродинамических профилей 2A, 2B,…, 2n. Таким образом, создается разграничение между обычными входными сигналами аэродинамических профилей, с одной стороны, и регулируемыми выходами, с другой стороны.
Предпочтительное применение устройства 1 в соответствии с изобретением относится к его использованию в методике для распознавания аэродинамического явления на летательном аппарате. Эта методика, в частности, представляет следующие этапы с A/ по E/:
A/ выполнение с помощью упомянутого устройства 1 по меньшей мере одного протокола из n полетных испытаний, n является целым числом, дающего возможность получать множество n реальных входных кривых, представляющих команды отклонения, реально применяемые к летательному аппарату, и множество ассоциативно соответствующих реальных выходных кривых.
B/ подачу упомянутых n реальных входных кривых на упомянутый имитатор полета;
C/ измерение на упомянутом имитаторе полета соответствующих выходных кривых, полученных в ответ на применение упомянутых n реальных входных кривых;
D/ сравнение попарно упомянутых реальных выходных кривых и упомянутых соответствующих входных кривых, порожденных упомянутым имитатором полета;
E/ уточнение имитационной модели, используемой упомянутым имитатором полета, на основе этого сравнения.
Изобретение относится к способу и устройству для выполнения летного испытания на летательном аппарате, способу выполнения протокола из множества испытаний, методике для идентификации аэродинамических явлений. Устройство (1) содержит руль (2А, 2В, 2n) направления, устройство (4) управления для подачи команды отклонения на руль управления, средство (6) для измерения характеристики восстановления, отображающей изменение движения летательного аппарата, средство (7) для регистрации примененной команды отклонения и соответствующей характеристики восстановления, средство (13) серворегулирования для приведения в действие летательного аппарата, для поддержания характеристики восстановления, средство (10) для приема команды восстановления, средство (11), формирующее команду отклонения руля направления. Достигается улучшение наблюдаемости различных явлений механики полета. 4 н. и 5 з.п. ф-лы, 1 ил.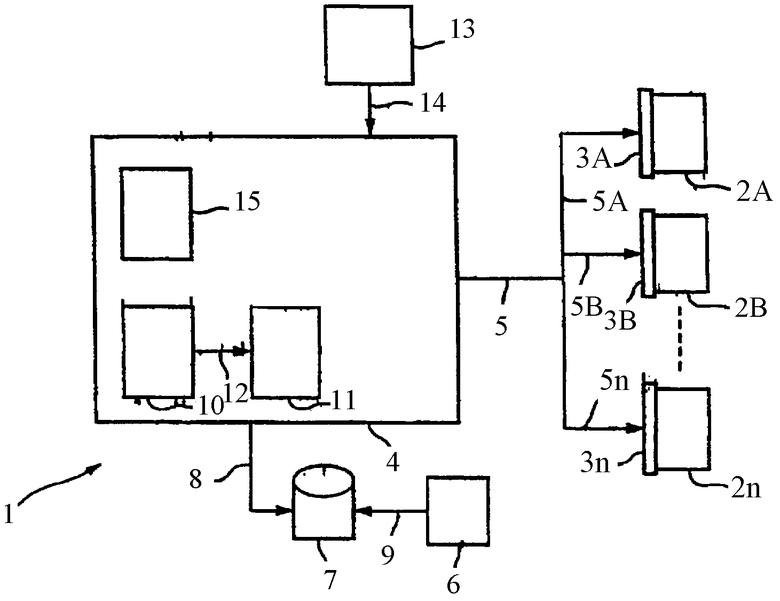
1. Способ для выполнения, по меньшей мере, одного полетного испытания на летательном аппарате, согласно этому способу:
a) вырабатывают, по меньшей мере, одну команду отклонения, которая должна подаваться на, по меньшей мере, один аэродинамический профиль (2А, 2В, 2n) летательного аппарата,
b) упомянутую команду отклонения подают в ходе полета упомянутого летательного аппарата на упомянутый аэродинамический профиль (2А, 2В, 2n), который способен к отклонению так, чтобы действовать, по меньшей мере, по одной оси пилотирования летательного аппарата, и который содержит, по меньшей мере, один привод (3А, 3В, 3n) для отклонения упомянутого аэродинамического профиля (2А, 2В, 2n) в качестве функции, по меньшей мере, одной команды отклонения, упомянутая команда отклонения иллюстрирует постепенное изменение отклонения, как функции времени,
c) измеряют, по меньшей мере, одну выходную кривую, иллюстрирующую постепенное изменение, как функции времени, движения летательного аппарата в ответ на подачу упомянутой команды отклонения на аэродинамический профиль (2А, 2В, 2n) в ходе полета, и
d) регистрируют команду отклонения, подаваемую на аэродинамический профиль (2А, 2В, 2n), и измеренную соответствующую выходную кривую, при этом, на этапе а) принимают, по меньшей мере, одну выходную рабочую точку, дающую возможность получать, по меньшей мере, одну выходную кривую, которая является идентифицирующей для, по меньшей мере, одного аэродинамического эффекта летательного аппарата и вырабатывают, по меньшей мере, одну команду отклонения аэродинамического профиля, которая вызвана упомянутой принятой выходной рабочей точкой, и летательный аппарат ведут в полете так, чтобы получать и поддерживать на упомянутом летательном аппарате упомянутую идентифицирующую выходную кривую в ходе применения упомянутой команды отклонения, вызванной упомянутой выходной рабочей точкой.
2. Способ по п.1, отличающийся тем, что на этапе а) также принимают, по меньшей мере, одну команду отклонения аэродинамического профиля, которая подается как есть на упомянутый аэродинамический профиль (2А, 2В, 2n).
3. Способ по п.1, отличающийся тем, что, для формирования команды отклонения, вызванной выходной рабочей точкой, и выполнения ведения, используют средство, которое сформировано на основе так называемой теории модального управления.
4. Способ по п.1, отличающийся тем, что, для выполнения испытания, упомянутые этапы с а) по d) и упомянутую подстройку реализуют для множества разных аэродинамических профилей (2А, 2В, 2n) летательного аппарата.
5. Устройство для выполнения, по меньшей мере, одного испытания на летательном аппарате, упомянутое устройство (1) содержит по меньшей мере, один аэродинамический профиль (2А, 2В, 2n) летательного аппарата, способный к отклонению так, чтобы действовать, по меньшей мере, по одной оси пилотирования летательного аппарата в ходе полета, и содержащий, по меньшей мере, один привод (3А, 3В, 3n) для отклонения упомянутого аэродинамического профиля (2А, 2В, 2n), как функции, по меньшей мере, одной принятой команды отклонения, которая иллюстрирует постепенное изменение отклонения, как функции времени, устройство (4) управления для передачи на упомянутый привод (3А, 3В, 3n), по меньшей мере, одной команды отклонения, которая должна подаваться на упомянутый аэродинамический профиль (2А, 2В, 2n), средство (6) для измерения, по меньшей мере, одной выходной кривой, иллюстрирующей постепенное изменение, как функции времени, движения летательного аппарата, в ответ на подачу в полете команды отклонения на аэродинамический профиль (2А, 2В, 2n) и средство (7) для регистрации, по меньшей мере, одной команды отклонения, поданной на аэродинамический профиль (2А, 2В, 2n), и измеренной соответствующей выходной кривой, при этом упомянутое устройство (4) управления содержит по меньшей мере, одно первое средство (10), способное к приему, по меньшей мере, одной выходной рабочей точки, дающей возможность получать, по меньшей мере, одну выходную кривую, которая является идентифицирующей для, по меньшей мере, одного аэродинамического эффекта летательного аппарата, и, по меньшей мере, одно второе средство (11) для формирования, по меньшей мере, одной команды отклонения аэродинамического профиля, которая вызывается упомянутой выходной рабочей точкой, переданной упомянутым первым средством (10), и упомянутое устройство (1), кроме этого, содержит, по меньшей мере, одно средство (13) ведения для ведения летательного аппарата так, чтобы получать и поддерживать на упомянутом летательном аппарате упомянутую идентифицирующую выходную кривую, когда соответствующая команда отклонения, сформированная упомянутым вторым средством (11), подается на аэродинамический профиль.
6. Устройство по п.5, отличающееся тем, что упомянутое устройство (4) управления, кроме того, содержит третье средство (15) для приема, по меньшей мере, одной команды отклонения аэродинамического профиля, которая передается как есть на привод (3А, 3В, 3n) аэродинамического профиля (2А, 2В, 2n).
7. Устройство по п.5, отличающееся тем, что упомянутый аэродинамический профиль (2А, 2В, 2n) соответствует одному из следующих элементов летательного аппарата: интерцептору, элерону, хвостовому стабилизатору, рулю высоты и стабилизатору.
8. Способ для выполнения протокола из n полетных испытаний на летательном аппарате, n является целым числом, большим чем 1, отличающийся тем, что на подготовительном этапе определяют m команд отклонения аэродинамического профиля, которые должны применяться непосредственно к летательному аппарату, и р выходных рабочих точек, которые дают возможность отделять, по меньшей мере, один аэродинамический эффект летательного аппарата во временной реакции последнего, которая иллюстрирует, по меньшей мере, одну выходную кривую, m и р являются целыми числами, такие, что m+p=n, выполняют n испытаний в ходе, по меньшей мере, последующего полета летательного аппарата, посредством применения, соответственно, упомянутых m команд отклонения и упомянутых p выходных рабочих точек, последние также подают в виде репрезентативных команд отклонения, упомянутые n испытаний выполняют, по меньшей мере, частично посредством реализации вышеупомянутого способа по п.1, и для каждого из упомянутых n испытаний, регистрируют поданную команду отклонения, и измеряют и регистрируют q соответствующих выходных кривых, q является целым числом.
9. Процедура для идентификации аэродинамического явления на летательном аппарате с помощью имитатора полета согласно этой процедуре:
А/ выполняют, по меньшей мере, один протокол из n осуществляемых в полете испытаний, n является целым числом, дающий возможность получать множество n реальных входных кривых, представляющих команды отклонения, реально применяемые к летательному аппарату, и множество ассоциативно соответствующих реальных выходных кривых,
В/ упомянутые n реальных входных кривых подают на упомянутый
имитатор полета,
С/ соответствующие выходные кривые, полученные в ответ на применение
упомянутых n реальных входных кривых, измеряют на упомянутом
имитаторе полета,
D/ упомянутые реальные выходные кривые и упомянутые
соответствующие выходные кривые, порожденные упомянутым
имитатором полета, попарно сравнивают, и
Е/ уточняют имитационную модель, используемую упомянутым
имитатором полета, на основе этого сравнения, в которой на этапе А/, реализуют способ по п.8.
| ЕР 0999484 А, 10.05.2000 | |||
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2163387C1 |
| АВТОМАТИЗИРОВАННАЯ ИСПЫТАТЕЛЬНАЯ СИСТЕМА ДЛЯ ОТРАБОТКИ, ЭЛЕКТРИЧЕСКИХ ПРОВЕРОК И ПОДГОТОВКИ К ПУСКУ КОСМИЧЕСКИХ АППАРАТОВ | 2003 |
|
RU2245825C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |

