Ссылки на родственные заявки
Настоящая заявка рассматривается совместно с заявкой №13/196844, озаглавленной «Улучшенная возможность обнаружения летательных аппаратов для проведения оптимальных операций в контролируемом воздушном пространстве» (Enhanced Detectability of Air Vehicles for Optimal Operations in Controlled Airspace) (досье №11-0294), и с заявкой №13/196855, озаглавленной «Способ и система для автономного направления летательного аппарата к месту посадки в случае чрезвычайной ситуации / непредвиденных обстоятельств с помощью бортовых датчиков» (Method and System to Autonomously Direct Aircraft to Emergency/Contingency Landing Sites Using On-board Sensors) (досье №11-0292), поданных по существу одновременно с настоящей заявкой, причем обе указанные заявки имеют того же патентообладателя, что и настоящая заявка, и описание которых включено в настоящую заявку посредством ссылки.
Область и уровень техники
Область техники
Варианты осуществления настоящего изобретения в целом относятся к области управляемого полета для беспилотных авиационных систем и, в частности, относятся к системе и способу управления беспилотной авиационной системой (БАС) в национальном воздушном пространстве посредством закрепленного на летательном аппарате-носителе заменителя БАС, установленного на опционально пилотируемом летательном аппарате (OPV, Optionally Piloted Vehicle), при которых система передает управление от связанных команд через систему управления полетом (FCS, Flight Control System) БАС к опционально пилотируемому летательному аппарату посредством интерпретатора управления полетом (FCI, Flight Control Interpreter).
Уровень техники
БАС становятся широко распространенными в мире авиации, но обычные процедуры, позволяющие им летать в национальном воздушном пространстве наряду со всеми другими типами летательных аппаратов, не созданы. Это происходит, в частности, вследствие различных задач, решаемых БАС, вследствие не принятых на законодательном уровне концепций их использования и вследствие отсутствия в настоящее время модернизации Национального воздушного пространства. Такая модернизация запланирована в течение приблизительно следующих 10 лет.
Испытания технологий и датчиков БАС сами по себе трудно выполнимы и дороги, поскольку очень трудно получить разрешение на демонстрацию новых возможностей; например, на участие в современных гражданских тренировочных полетах над населенными пунктами. Кроме того, Федеральное управление гражданской авиации ввело серьезные ограничения на полеты БАС в пределах Национального воздушного пространства. Разрешение на полеты БАС может быть выдано Федеральным управлением гражданской авиации, но только для каждого конкретного случая и только при наличии одобрения Федерального управления гражданской авиации на выдачу Сертификата на разрешение (СОА, Certificate of Authorization), который по запросу выдается в отношении каждого отдельного полета. Сертификат на разрешение обычно очень трудно получить, это занимает много времени и во многих случаях в его выдаче отказывают. Эти ограничения Федерального управления гражданской авиации хотя и очевидно применяются в интересах поддержания безопасности выполнения полетов в национальном воздушном пространстве, сильно препятствуют усилиям по развитию, испытаниям и тренировочным полетам для быстро развивающегося семейства БАС.
Принятая в настоящее время практика в отношении эксплуатации БАС в национальном воздушном пространстве состоит в запросе на получение сертификата на разрешение и последующем проведении ограниченного допустимого полета в пределах налагаемых ограничений. Этот подход неблагоприятно воздействует на развитие, испытания и тренировку в отношении технологий БАС, значительно увеличивая стоимость программ и удлиняя график их реализации.
Следовательно, желательно иметь возможность для демонстрации безопасным, эффективным и низкозатратным образом возможности БАС для полетов в Национальном воздушном пространстве.
Раскрытие изобретения
Описанные в настоящем документе варианты осуществления изобретения формируют систему для испытаний беспилотной авиационной системы (БАС), содержащую систему управления полетом БАС и опционально пилотируемый летательный аппарат (OPV), несущий систему управления полетом БАС. Опционально пилотируемый летательный аппарат содержит систему управления своим полетом и интерпретатор управления полетом (FCI), выполненный с возможностью приема входных сигналов от системы управления полетом БАС, представляющих собой управляющие параметры для профиля полета БАС. Интерпретатор управления полетом обеспечивает команды текущего состояния в качестве выходного сигнала для системы управления полетом опционально пилотируемого летательного аппарата для воспроизведения профиля полета. Система управления полетом опционально пилотируемого летательного аппарата содержит возможность вмешательства пилота в чрезвычайной ситуации для обеспечения безопасности полета или в других непредвиденных обстоятельствах, разрешающую бортовому пилоту брать на себя управление опционально пилотируемым летательным аппаратом, к которому присоединена БАС.
Преимущественно система управления полетом опционально пилотируемого летательного аппарата может использоваться для оценки и помощи в реализации усовершенствований в отношении Национального воздушного пространства, таких как: 4D траектории, уменьшенный объем связи «воздух-земля», создание секторов воздушного пространства для лучшего уравновешивания рабочей нагрузки управляющих средств, установление ограниченного «динамического повторного разбиения на сектора», совместно используемые Федеральным управлением гражданской авиации и пользователем полетный план и информация об осведомленности об обстановке и лучшее распространение общей погодной информации для Федерального управления авиации и пользовательского оборудования.
БАС и опционально пилотируемый летательный аппарат могут быть включены в систему для испытания БАС с внешней подвеской, когда по меньшей мере фюзеляж БАС содержит систему управления полетом БАС, установленную на опционально пилотируемом летательном аппарате. Опционально пилотируемый летательный аппарат, содержащий систему управления полетом опционально пилотируемого летательного аппарата с возможностью вмешательства пилота, несет фюзеляж БАС и интерпретатор управления полетом, принимающий управляющие параметры от системы управления полетом БАС. Интерпретатор управления полетом снабжает командами текущего состояния систему управления полетом опционально пилотируемого летательного аппарата для воспроизведения профиля полета БАС, которое затем отслеживают посредством наземного устройства слежения за опционально пилотируемым летательным аппаратом.
В описанных выше вариантах осуществления настоящего изобретения обеспечен способ для проведения испытаний беспилотной авиационной системы (БАС) в национальном воздушном пространстве, в котором по меньшей мере фюзеляж БАС, содержащий систему управления полетом БАС, прикреплен к опционально пилотируемому летательному аппарату, содержащему систему управления полетом опционально пилотируемого летательного аппарата, выполненную с обеспечением возможности вмешательства пилота. Система управления полетом БАС связана с интерпретатором управления полетом, который связан с системой управления полетом опционально пилотируемого летательного аппарата. Инициируют профиль полета БАС, а управляющие параметры от системы управления полетом БАС подают на интерпретатор управления полетом. В интерпретаторе управления полетом интерпретируют управляющие параметры. Выполняется определение, завершен ли профиль полета, и если это не так, в систему управления опционально пилотируемого летательного аппарата подают команды текущего состояния в качестве выходного сигнала интерпретатора управления полетом. Определяют наличие команды вмешательства пилота и при ее отсутствии управляют опционально пилотируемым летательным аппаратом на основании команд текущего состояния.
Описанные выше признаки, функции и преимущества могут быть независимо достигнуты в различных вариантах осуществления настоящего изобретения или могут быть объединены в дополнительных вариантах осуществления изобретения, подробное описание которых может быть получено из последующих описания и чертежей.
Краткое описание чертежей
На фиг.1 представлена блок-схема элементов системы для примерного варианта осуществления изобретения;
На фиг.2 представлена блок-схема информационного потока оперативной концепции для примерного варианта осуществления указанной системы;
На фиг.3 представлена блок-схема примера эксплуатационного режима полета указанной системы;
На фиг.4A-4D представлены примеры платформы опционально пилотируемого летательного аппарата для использования в вариантах осуществления указанной системы;
На фиг.5 представлена блок-схема для способа работы описанных в настоящем документе вариантов осуществления изобретения;
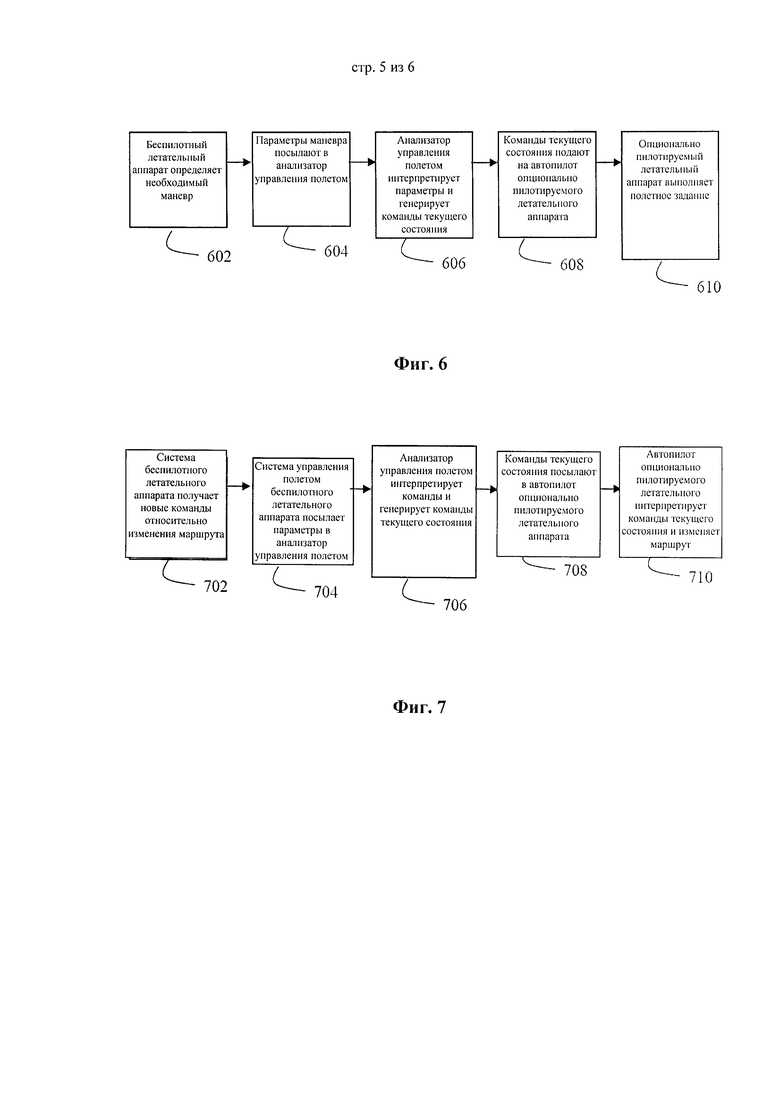
На фиг.6 представлена блок-схема, отображающая поток команд и информации между БАС и опционально пилотируемым летательным аппаратом в вариантах осуществления указанной системы;
На фиг.7 представлена блок-схема, отображающая процесс изменения маршрута, который БАС должна выполнить и затем сообщить об этом опционально пилотируемому летательному аппарату; и
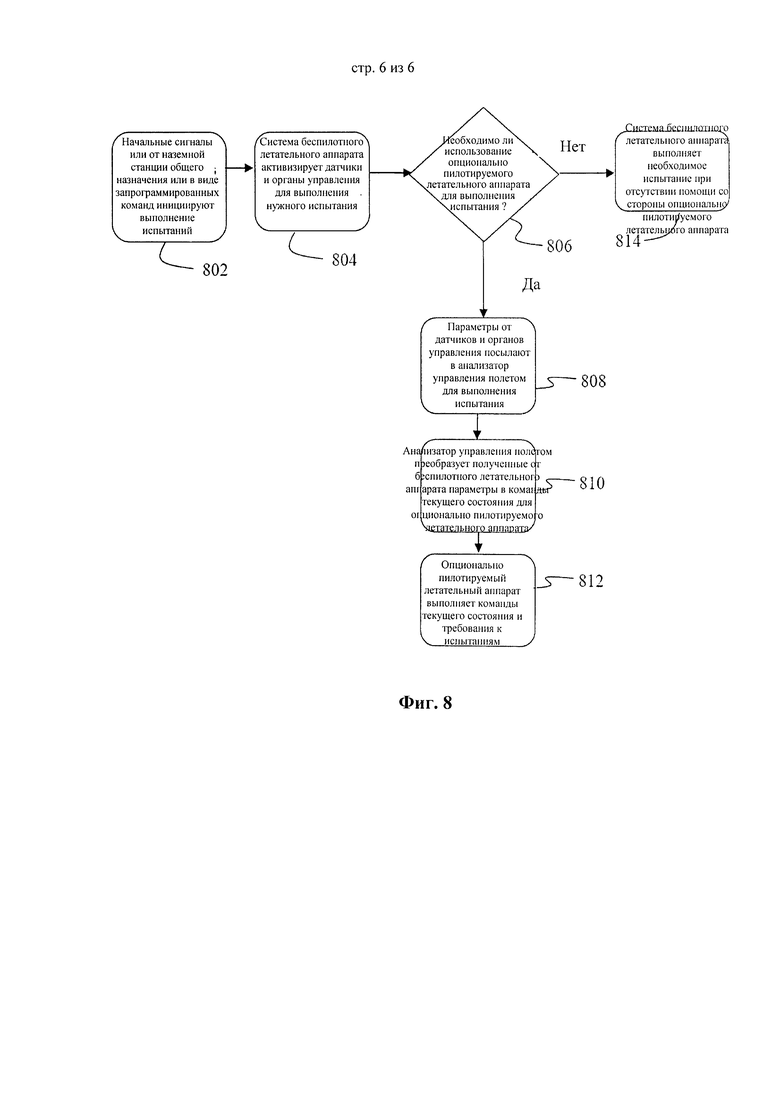
На фиг.8 представлена блок-схема, отображающая проведение испытаний и взятие выборок данных для БАС, которые могут быть выполнены в течение полета с опционально пилотируемым летательным аппаратом.
Подробное описание изобретения
Описываемые здесь варианты осуществления настоящего изобретения обеспечивают испытательную среду, согласующуюся с правилами Федерального управления гражданской авиации для пилотируемых летательных средств, работающих в пределах Национального воздушного пространства. Каркас БАС, его полезная нагрузка и радиоэлектронное оборудование установлены на опционально пилотируемом летательном аппарате или внутри его. Поскольку у опционально пилотируемого летательного аппарата есть пилот на борту, он согласуется с требованиями Федерального управления гражданской авиации для полетов в пределах Национального воздушного пространства. Во время проведения испытаний БАС управление опционально пилотируемым летательным аппаратом осуществляют посредством команд, задаваемых компьютером с управляющим алгоритмом, для имитации характеристик полета БАС. Таким образом, опционально пилотируемый летательный аппарат способен эмулировать с точки зрения кинематики профиль полета БАС. При возникновении нештатной ситуации во время испытательного полета управление опционально пилотируемым летательным аппаратом немедленно переходит к дублирующему пилоту, который затем будет управлять им вручную в соответствии с правилами полетов в Национальном воздушном пространстве. Интерпретатор полета работает с возможностью интерпретации команд полета, поступающих в БАС и из БАС в опционально пилотируемый летательный аппарат. Опционально пилотируемый летательный аппарат можно использовать для проведения испытаний БАС в связи с запланированными усовершенствованиями Национального воздушного пространства: 4D траектории, уменьшенный объем связи «воздух-земля», создание секторов воздушного пространства для лучшего уравновешивания рабочей нагрузки управляющих средств, установление ограниченного «динамического повторного разбиения на сектора», совместно используемые Федеральным управлением гражданской авиации и пользователем план полета и информация об осведомленности в обстановке, и лучшее распространение общей погодной информации для Федерального управления авиации и оборудования пользователя.
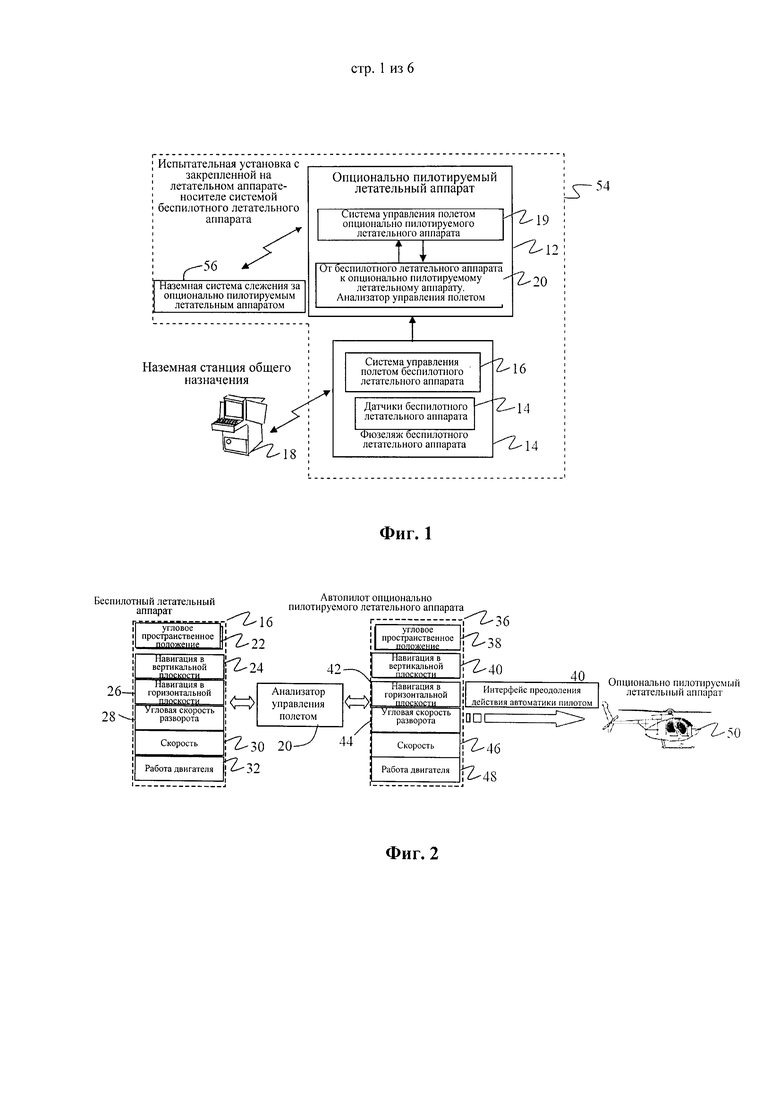
Как показано на фиг.1, рабочие и управляющие элементы БАС, которая может представлять собой полный фюзеляж 10 или в некоторых вариантах осуществления изобретения полную БАС, переносятся опционально пилотируемым летательным аппаратом 12. Фюзеляж БАС содержит датчики 14 БАС и систему 16 управления полетом беспилотного летательного аппарата и осуществляет связь с общей наземной станцией 18, использующей программное обеспечение для создания команд и управления, такое как программная среда компании «Insitu» для нескольких БАС (I-MUSE), произведенная компанией «Insitu Inc.» (118 East Columbia River Way, Bingen, штат Вашингтон 98605). При надлежащей автономной работе полной БАС система 16 управления полетом беспилотного летательного аппарата управляет курсом полета БАС, принимая информацию об управлении полетом от общей наземной станции, причем датчики БАС снабжают общую наземную станцию информацией о полете. На определенных фазах выполнения полета система управления полетом БАС может работать в предварительно запрограммированном режиме независимо от общей наземной станции и только передавать информацию текущего состояния о полете и данные датчиков.
Опционально пилотируемый летательный аппарат 12 содержит систему 19 управления полетом, управляющую работой опционально пилотируемого летательного аппарата, содержащую систему автопилота для обычного управления маршрутом полета опционально пилотируемого летательного аппарата. Опционально пилотируемый летательный аппарат выбран или разработан с областью полетных режимов, охватывающей область полетных режимов БАС для возможности обеспечения характеристик полета, сопоставимых с характеристиками автономной БАС. Интерпретатор 20 управления полетом, осуществляющий связь БАС с опционально пилотируемым летательным аппаратом, присоединен с обеспечением возможности приема входного сигнала от системы 16 управления полетом БАС и направления выходного сигнала в систему 19 управления полетом опционально пилотируемого летательного аппарата.
На фиг.2 показан информационный поток оперативной концепции для примерного варианта осуществления указанной системы. Система 16 управления полетом БАС для описанного примерного варианта осуществления изобретения обеспечивает шесть основных управляющих параметров в качестве входных сигналов в интерпретатор 20 управления полетом: данные 22 об угловом пространственном положении, данные 24 о навигации в вертикальной плоскости, данные 26 о навигации в горизонтальной плоскости, данные 28 о скорости поворота, данные 30 о скорости и данные 32 о работе двигателя (например, количество оборотов в минуту). Интерпретатор управления полетом интерпретирует входные данные и преобразует их в команды текущего состояния с возможностью их интерпретации автопилотом 36 опционально пилотируемого летательного аппарата для реализации профиля полета, воспроизводящего или имитирующего профиль полета, который был бы выполнен БАС в одиночку. Автопилот 36 затем использует команды текущего состояния и данные 38 об угловом пространственном положении, данные 40 о навигации в вертикальной плоскости, данные 42 о навигации в горизонтальной плоскости, данные 44 о скорости поворота, данные 46 о скорости и данные 48 о работе двигателя для управления поверхностями управления полетом опционально пилотируемого летательного аппарата (представленные самим опционально пилотируемым летательным аппаратом как элемент 50) для реализации этого профиля полета. Интерфейс 52 вмешательства пилота позволяет преодолевать команды интерпретатора управления полетом при непосредственном управлении пилотом-человеком.
При отсутствии прерывания со стороны интерфейса 52 вмешательства пилота опционально пилотируемый летательный аппарат будет работать с профилем полета и кинематикой полета, идентичными БАС, позволяя оценивать как управление БАС, так и профиль полета. Возвращаясь к фиг.1, можно видеть, что испытательная установка 54 для БАС с внешней подвеской (UAS С), содержащая опционально пилотируемый летательный аппарат 12 и наземную систему 56 слежения за опционально пилотируемым летательным аппаратом, работающую независимо от общей наземной станции 18 БАС, обеспечивает возможность достаточно точного воспроизведения бортового радиоэлектронного оборудования и кинематики полета испытательных образцов БАС, обеспечивает прозрачный для пользователя эксплуатационный интерфейс к БАС, представляющий собой комплексную испытательную среду, почти идентичную среде, которая бы имела место при реальном полете БАС, и обеспечивает тренировочную среду для пилота БАС, которая могла быть осуществлена в региональном масштабе, как это требуется агентствами и учреждениями предполагаемого пользователя. Программные преимущества включают снижение издержек ввиду отсутствия необходимости использовать дорогие испытательные полигоны, способность обходить дорогостоящие квалификационные процессы для аппаратных средств полета и устранение возможных потерь беспилотных летательных аппаратов в ходе испытаний. Испытательная установка для БАС с внешней подвеской может обеспечить систему для сертификации БАС и их аппаратных средств. Кроме того, испытательная установка для БАС с внешней подвеской имеет потенциал для использования ограниченных оперативных возможностей, при которых передовые современные технологии датчиков БАС можно быстро несистематически использовать в случае особой необходимости, например, при операциях, проводимых Министерством Национальной безопасности, в поисковых и спасательных операциях и в случае чрезвычайных ситуаций, таких как недавний разлив нефти в районе залива.
Испытательная установка для БАС с внешней подвеской использует опционально пилотируемый летательный аппарат для демонстрации работы БАС к удовлетворению Федерального управления гражданской авиации с точки зрения безопасности полета и сочетаемости с последними технологиями в отношении Национального воздушного пространства, например, 4D траекториями. В примерном варианте осуществления изобретения фюзеляж БАС установлен на опционально пилотируемом летательном аппарате с датчиками на борту и удаленными крыльями и двигателем. В других вариантах осуществления изобретения полная БАС или только датчики и управляющие элементы БАС могут быть установлены на опционально пилотируемом летательном аппарате. Интерпретатор управления полетом посылает команды на осуществляющий алгоритм управления компьютер опционально пилотируемого летательного аппарата в автопилоте 36 для имитации характеристик полета БАС. Таким образом, управление реальным полетом опционально пилотируемого летательного аппарата полностью прозрачно для оператора на общей наземной станции 18. В случае аварии, возникновения проблем для безопасности полета или другого непредвиденного обстоятельства пилот на борту опционально пилотируемого летательного аппарата осуществляет связь с операторами управления воздушным движением и операторами БАС и может в любой момент принять на себя управление опционально пилотируемым летательным аппаратом через интерфейс 52 вмешательства пилота.
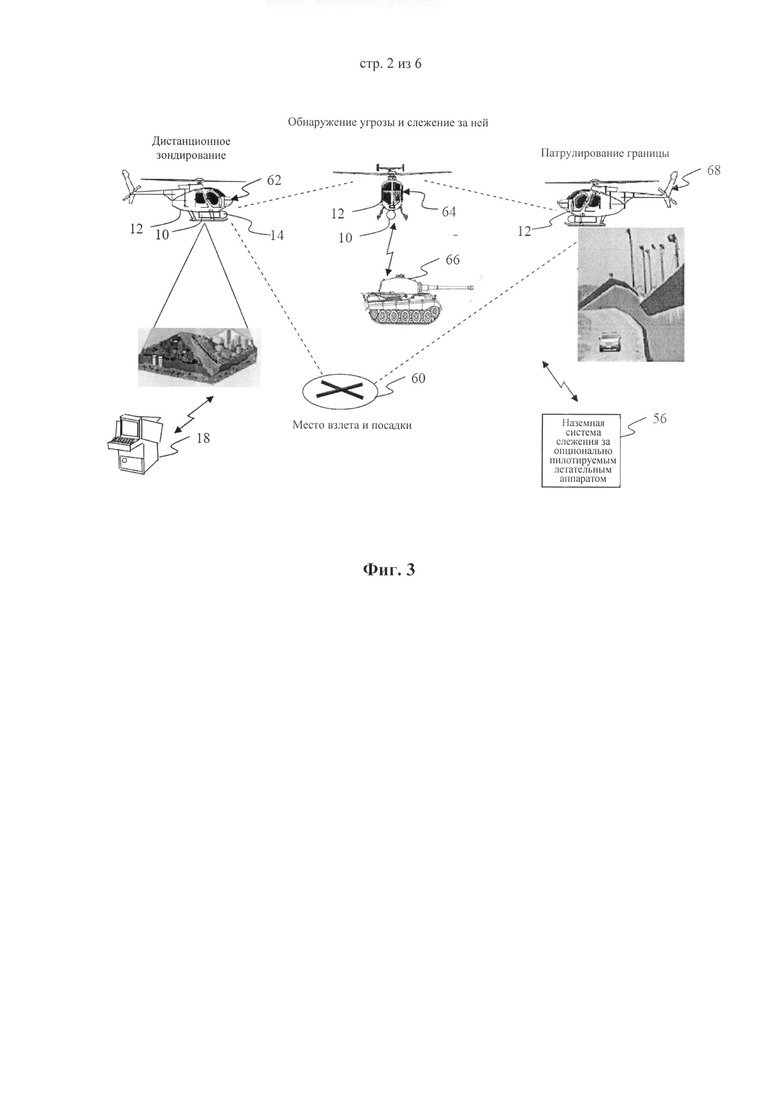
Как показано на фиг.3, полный набор испытаний в реальных условиях для БАС может быть получен посредством испытательной установки для БАС с внешней подвеской, использующей опционально пилотируемый летательный аппарат. Под управлением общей наземной станции 18 или под предварительно запрограммированным автономным управлением в самой БАС, отслеживаемой при помощи общей наземной станции, опционально пилотируемый летательный аппарат 12 с прикрепленной БАС 10 удаляется от места 60 взлета и посадки (например, аэропорта или запасного аэропорта возврата), работая с профилем полета для проведения дистанционного зондирования посредством датчиков 14 БАС в первом местоположении 62, перехода ко второму местоположению 64 для обнаружения угрозы и слежения за фактическими или моделируемыми угрозами, например танками 66 или другими устройствами, такими как радар или ракеты класса «земля-воздух». Опционально пилотируемый летательный аппарат могут затем переместить в третье местоположение 68 для фактического или моделируемого патрулирования границы при использовании, как и раньше, датчиков БАС. Опционально пилотируемый летательный аппарат затем возвращают к месту 60 взлета и посадки для приземления (или в альтернативный аэропорт возврата). Всю операцию независимо отслеживают при помощи наземной системы 56 слежения за опционально пилотируемым летательным аппаратом. Испытательную установку для БАС с внешней подвеской можно использовать в аналогичных сценариях для: 1) развертывания БАС в Национальном воздушном пространстве без сертификата разрешения от Федерального управления гражданской авиации; 2) демонстрации БАС над населенными областями; 3) применения технологии «Обнаружения и предотвращения» - испытания, оценка и проверка; 4) применения технологии «Чрезвычайная ситуация в полете над областью безопасности (SAFE, Safe Area Flight Emergency)» - испытания, оценка и проверка, описанные в одновременно рассматриваемой заявке №ХХ/ХХХ, XXX, озаглавленной «Способ и система для автономного направления летательного аппарата к месту посадки в случае чрезвычайной ситуации / непредвиденных обстоятельств с помощью бортовых датчиков» (досье №11-0292 патентного поверенного); 5) развития операций управления (CONOPS) для различных сценариев полета; 6) испытания новой технологии датчиков БАС и 7) демонстрации специализированной сети передачи данных в БАС.
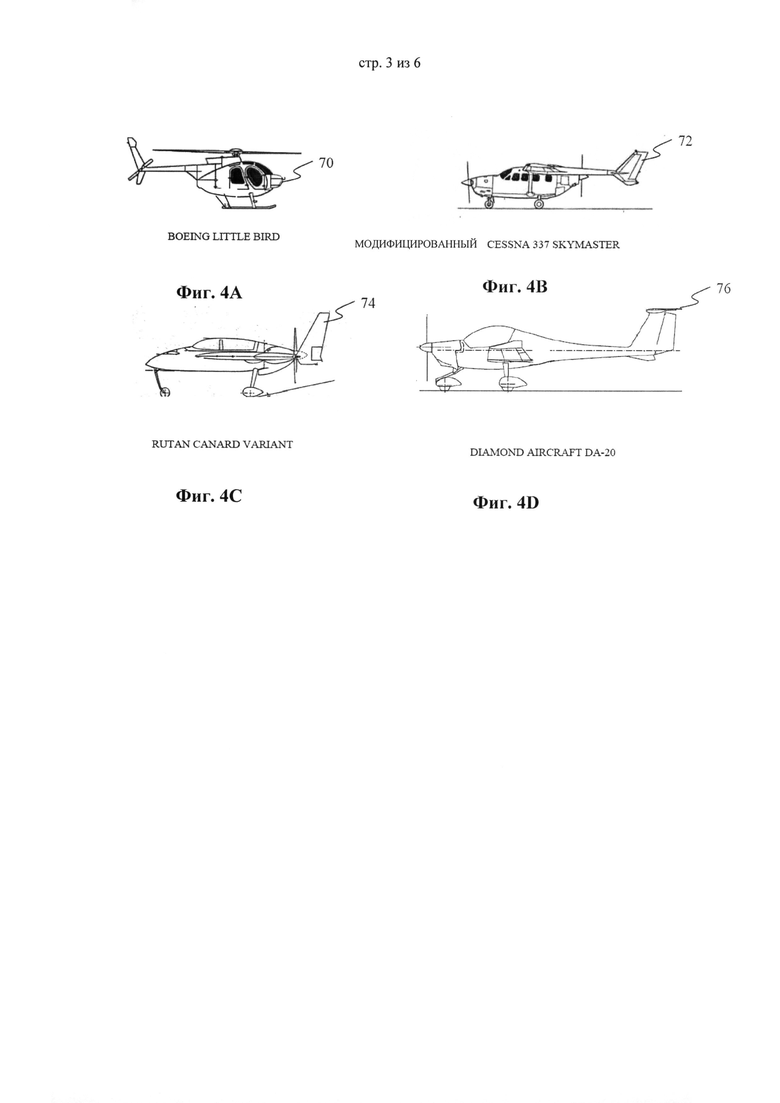
Различные конфигурации летательных аппаратов можно использовать, как показано в фиг.4A-4D, в качестве опционально пилотируемого летательного аппарата в испытательной установке для БАС с внешней подвеской. Первая конфигурация опционально пилотируемого летательного аппарата представляет собой вертолет 70, например, типа «Boeing Little Bird», показанный на фиг.4А. Этот тип аппарата позволяет осуществить широкий диапазон рабочих скоростей, чтобы приспособиться к моделированию медленно летящей БАС или к моделированию винтокрылого летательного аппарата или БАС вертикального взлета и посадки со способностью парения. В одном примере могут быть запущены средства поражения, например, выполнены испытания ракеты или оружия при использовании как режима медленной атаки, так и режима быстрой атаки без требования со стороны оператора. Таким образом, эта независимая эксплуатационная конфигурация опционально пилотируемого летательного аппарата, которая может быть предварительно запрограммирована на одной или нескольких стадиях или планах, обеспечивает повышенный уровень безопасности за счет устранения необходимости в операторе. Как таковая, эта конфигурация приводит к меньшей подверженности оператора опасностям, связанным с контролируемостью сценария агрессивной атаки. Кроме того, еще в одном примере, в ходе полета с целью сбора разведывательной информации или распознавания людей или ландшафта земли агрессивное боковое, а также вертикальное ускорение и конфигурации крена могут быть выполнены около неподвижных или движущихся структур или других движущихся целей или летательных аппаратов, не жертвуя безопасностью оператора, причем такие варианты проведения испытаний не были бы возможны со многими обычными беспилотными летательными аппаратами.
В других конфигурациях, обычный самолет авиации общего назначения, например, «Cessna SkyMaster» 72 (модель «Cessna C337» или «USAF 0-2»), показанный на фиг.4В, можно использовать в отношении больших БАС, обладающих большей полезной нагрузкой и/или скоростью. В других вариантах реализации опционально пилотируемые летательные аппараты, предназначенные для меньших БАС, могут содержать такие транспортные средства, как самолет 74 типа «утка», основанный на конструкциях Burt Rutan, например, «Rutan Canard Variant» (например, моделей «VariEze» или «LongEze»), показанный на фиг.4С, или «Diamond Aircraft DA-20» 76, показанный на фиг.4D. Выгодно, что в этих обычных примерах использования авиации общего назначения различные скорости взлета и посадки и углы атаки можно использовать для генерации графиков рабочих характеристик летательного аппарата во время оперативного срока службы таким образом, что оператор может дистанционно управлять БАС и в режиме реального времени отслеживать с находящегося на удалении стратегического наблюдательного пункта различные механические конфигурации. Например, механическая конфигурация может содержать: размах крыла, коэффициенты структурного лобового сопротивления фюзеляжа или крыла, спектры обтекания аэродинамической поверхности, перемещение руля поворота, отклонение крыла, поворот и колебание хвоста и характеристики взлета, подъема и снижения летательного аппарата. Также оператор может по существу одновременно наблюдать и/или отслеживать физические, электрические и кинематические характеристики летательного аппарата, не подвергаясь внешним силам или опасностям. Такие внешние силы или опасности могут привести к непреднамеренной катастрофе вследствие ошибки оператора или механического повреждения или внезапного непредсказуемого изменения направления ветра, что может привести к возникновению ситуации «штопора на хвост», которая при ненадлежащей реакции на нее может приводить к нежелательным последствиям.
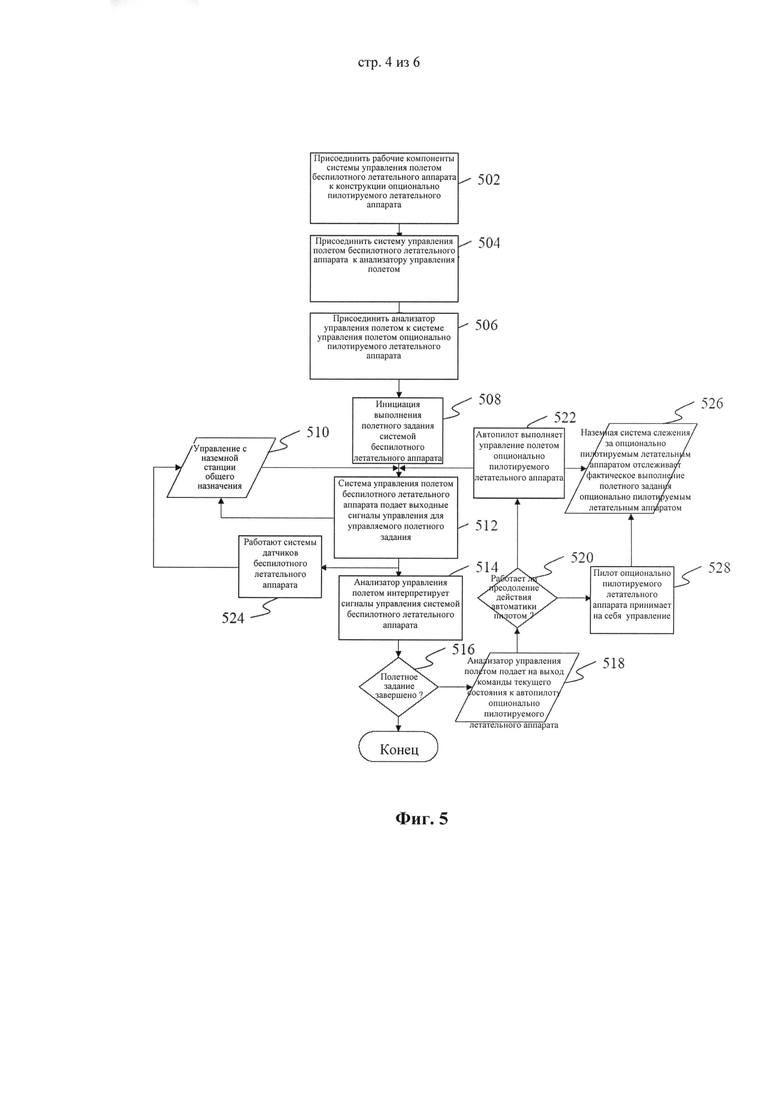
При работе были реализованы, как показано на блок-схеме фиг.5В, варианты осуществления испытательной установки для БАС с внешней подвеской. Фюзеляж 10 БАС с рабочими компонентами системы управления полетом БАС и системой датчиков присоединяют к конструкции 12 опционально пилотируемого летательного аппарата (этап 502). Систему 16 управления полетом БАС присоединяют к интерпретатору 20 управления полетом (этап 504), а интерпретатор управления полетом присоединяют к системе 19 управления полетом опционально пилотируемого летательного аппарата (этап 506). Затем начинают выполнение профиля полета БАС (этап 508). Как описано ранее, профиль полета БАС может быть предварительно запрограммирован. В других случаях управление выполнением профиля полета БАС может быть проведено оператором (например, уполномоченным авиационным сотрудником или управляющим) на общей наземной станции 18, причем при этом могут быть обеспечены данные 510 для системы управления полетом БАС. Система управления полетом БАС затем обеспечивает выходные управляющие сигналы для управляемого командами профиля полета (этап 512). Интерпретатор 20 управления полетом интерпретирует управляющие сигналы БАС (этап 514). Как указано выше, управляющие сигналы БАС могут содержать данные 22 об угловом пространственном положении, данные 24 о навигации в вертикальной плоскости, данные 26 о навигации в горизонтальной плоскости, данные 28 о скорости поворота, данные 30 о скорости и данные 32 о работе двигателя. При незавершенности профиля полета (этап 516) интерпретатор управления полетом подает на выход команды текущего состояния к автопилоту 36 опционально пилотируемого летательного аппарата (этап 518). Как указано выше, команды текущего состояния могут содержать данные 38 об угловом пространственном положении, данные 40 о навигации в вертикальной плоскости, данные 42 о навигации в горизонтальной плоскости, данные 44 об скорости поворота, данные 46 о скорости и данные 48 о работе двигателя. При отсутствии вмешательства пилота (этап 520) автопилот затем выполняет управление полетом опционально пилотируемого летательного аппарата (этап 522) в соответствии с командами текущего состояния, имитирующими профиль полета, который был бы реализован БАС при автономной работе. Во время полета системы 14 датчиков БАС находятся в рабочем состоянии (этап 524), подавая данные на общую наземную станцию так же, как если бы БАС работала автономно. Опционально пилотируемый летательный аппарат и его системы «прозрачны» для оператора БАС на общей наземной станции. Наземная система 56 слежения за опционально пилотируемым летательным аппаратом отслеживает фактическое выполнение профиля полета опционально пилотируемым летательным аппаратом, обеспечивая подтверждающие данные относительно характеристик реального полета (этап 526). В случае возникновения чрезвычайной ситуации, проблем с безопасностью полета или другой аномалии или непредвиденного обстоятельства может быть осуществлено вмешательство пилота (этап 520), и пилот опционально пилотируемого летательного аппарата может принять на себя непосредственное управление опционально пилотируемым летательным аппаратом (этап 528), отменяя команды текущего состояния, выдаваемые интерпретатором управления полетом.
Различные функции БАС могут быть испытаны и проверены при полете с опционально пилотируемым летательным аппаратом. В качестве первого примера могут быть испытаны команды на поворот и тангаж опционально пилотируемого летательного аппарата.
БАС, присоединенная во время своего полета к опционально пилотируемому летательному аппарату, отправляет команды через интерпретатор управления полетом к осуществляющему алгоритм управления компьютеру опционально пилотируемого летательного аппарата таким образом, что он может поворачивать, осуществлять тангаж или иным образом лететь предписанным образом. Входные сигналы, поступающие от общей наземной станции или от блока датчиков БАС (принимающих, например, данные об угловом пространственном положении, о навигации в вертикальной плоскости, о навигации в горизонтальной плоскости, о скорости поворота, о скорости и работе двигателя), позволяют БАС определить, например, что она должна повернуть направо. Для поворота направо она проводит следующую операцию, показанную на фиг.6, которая отображает поток команд и информации между БАС и опционально пилотируемым летательным аппаратом. Сначала БАС определяет посредством своих шести основных управляющих параметров для этого варианта осуществления изобретения, что нужно выполнить маневр (например, правый поворот) (этап 602). Затем она посылает соответствующие данные о параметрах в интерпретатор управления полетом (этап 604), который генерирует команды текущего состояния для изменения текущего маршрута опционально пилотируемого летательного аппарата. Эти команды текущего состояния отправляют к опционально пилотируемому летательному аппарату (этап 606), который затем интерпретирует команды и выполняет профиль полета (этап 608), имитирующий или воспроизводящий профиль полета, который был бы выполнен БАС в одиночку.
Изменение маршрута для соответствия командам от общей наземной станции представляет собой второй пример. БАС иногда необходимо отвечать на команды изменения маршрута, поступающие от внешнего оператора (не от пилота в опционально пилотируемом летательном аппарате). При получении таких команд их затем обрабатывают посредством потока, подобного показанному на фиг.6. Фиг.7 поясняет процесс изменения маршрута, выполняемый БАС с последующим сообщением на опционально пилотируемый летательный аппарат. При получении БАС новых команд относительно изменения маршрута (этап 702) система управления полетом БАС отправляет параметры к интерпретатору управления полетом (этап 704). Интерпретатор управления полетом интерпретирует команды и генерирует команды текущего состояния для автопилота опционально пилотируемого летательного аппарата (этап 706). Команды текущего состояния затем отправляют к автопилоту (этап 708), который интерпретирует команды текущего состояния и изменяет маршрут (этап 710).
В третьем примере проведение испытаний и взятие выборки данных для БАС может быть реализовано во время полета с опционально пилотируемым летательным аппаратом. Для сертификации полета БАС должна выполнить несколько проверок безопасности и эффективности и удовлетворить требованиям, связанным с этими проверками. Для выполнения некоторых из этих испытаний может потребоваться помощь со стороны опционально пилотируемого летательного аппарата. Такие примеры включают оценку возможностей при взлете и снижении и отслеживание экономичности использования топлива. Как показано на фиг.8, начальные сигналы посылают в БАС (или от общей наземной станции, или в виде запрограммированных команд), которая должна выполнить необходимое испытание (этап 802). БАС активизирует свои внутренние датчики и средства управления (этап 804) и определяет, требует ли это испытание помощи/сотрудничества со стороны опционально пилотируемого летательного аппарата (этап 806). Если это так, то параметры от необходимых датчиков и средств управления отправляют в интерпретатор управления полетом (этап 808), который затем преобразует информацию в команды текущего состояния для опционально пилотируемого летательного аппарата (этап 810). Опционально пилотируемый летательный аппарат затем выполняет указанные команды для проведения испытания (этап 812).
Обработка других данных, возможно, не требует вмешательства опционально пилотируемого летательного аппарата в процесс выполнения испытаний БАС (стрелка "НЕТ" на фиг.8), и БАС затем выполняет необходимое испытание при отсутствии помощи (этап 814). Примером испытания, не требующего вмешательства со стороны опционально пилотируемого летательного аппарата, может быть оценка точной воздушной скорости. БАС может содержать датчик воздушной скорости непосредственно на своем корпусе и не требовать при этом помощи/сотрудничества со стороны опционально пилотируемого летательного аппарата.
Система для проведения испытаний беспилотной авиационной системы (БАС), содержащая систему управления полетом БАС, опционально пилотируемый летательный аппарат (OPV), присоединенный к системе управления полетом БАС и содержащий систему управления полетом опционально пилотируемого летательного аппарата, и интерпретатор управления полетом, выполненный с возможностью приема входных сигналов от системы управления полетом БАС, представляющих собой управляющие параметры для профиля полета БАС, причем интерпретатор управления полетом обеспечивает команды текущего состояния в качестве выходных сигналов для системы управления полетом опционально пилотируемого летательного аппарата для воспроизведения профиля полета, а система управления полетом опционально пилотируемого летательного аппарата дополнительно выполнена с обеспечением возможности вмешательства пилота. Система для проведения испытаний БАС может содержать систему управления полетом БАС, которая встроена по меньшей мере в фюзеляж БАС и дополнительно содержит датчики БАС. Система для проведения испытаний БАС может содержать систему управления полетом опционально пилотируемого летательного аппарата, содержащую автопилот, принимающий команды текущего состояния от интерпретатора управления полетом. Система для проведения испытаний БАС может также содержать общую наземную станцию для управления системой управления полетом БАС. Кроме того, указанная система может содержать общую наземную станцию, принимающую данные от датчиков БАС. Управляющие параметры могут быть выбраны из группы, содержащей угловое пространственное положение, навигацию в вертикальной плоскости, навигацию в горизонтальной плоскости, скорость поворота, скорость и работу двигателя. Система для проведения испытаний БАС может содержать команды текущего состояния, которые выбраны из группы, содержащей угловое пространственное положение, навигацию в вертикальной плоскости, навигацию в горизонтальной плоскости, скорость поворота, скорость и работу двигателя.
Испытательная система для беспилотной авиационной системы (БАС) с внешней подвеской может содержать фюзеляж БАС, содержащий систему управления полетом БАС, и опционально пилотируемый летательный аппарат (OPV), содержащий систему управления полетом опционально пилотируемого летательного аппарата, выполненную с обеспечением возможности вмешательства пилота. Опционально пилотируемый летательный аппарат может нести фюзеляж БАС и интерпретатор управления полетом, выполненный с возможностью приема управляющих параметров от системы управления полетом БАС. Интерпретатор управления полетом может обеспечивать команды текущего состояния для системы управления полетом опционально пилотируемого летательного аппарата для воспроизведения профиля полета БАС. Испытательная система для БАС с внешней подвеской может содержать наземное устройство слежения за опционально пилотируемым летательным аппаратом и может содержать общую наземную станцию, выполненную с обеспечением возможности осуществления связи с системой управления полетом БАС. Испытательная система для БАС с внешней подвеской может дополнительно содержать датчики БАС, внедренные в фюзеляж БАС, причем указанные датчики выполнены с обеспечением возможности осуществления связи с общей наземной станцией. Система управления полетом опционально пилотируемого летательного аппарата может содержать автопилот, выполненный с возможностью приема команд текущего состояния от интерпретатора управления полетом. Испытательная система для БАС с внешней подвеской может содержать управляющие параметры, выбранные из группы, содержащей угловое пространственное положение, навигацию в вертикальной плоскости, навигацию в горизонтальной плоскости, скорость поворота, скорость и работу двигателя. Команды текущего состояния могут быть выбраны из группы, содержащей угловое пространственное положение, навигацию в вертикальной плоскости, навигацию в горизонтальной плоскости, скорость поворота, скорость и работу двигателя.
Способ проведения испытаний беспилотной авиационной системы (БАС) в Национальном воздушном пространстве может включать прикрепление по меньшей мере фюзеляжа БАС, содержащего систему управления полетом БАС, к опционально пилотируемому летательному аппарату, содержащему систему управления полетом опционально пилотируемого летательного аппарата, выполненную с обепечением возможности вмешательства пилота, соединение системы управления полетом БАС с интерпретатором управления полетом, соединение интерпретатора управления полетом с системой управления полетом опционально пилотируемого летательного аппарата, инициирование профиля полета БАС, подачу управляющих параметров от системы управления полетом БАС для интерпретатора управления полетом, интерпретацию управляющих параметров в интерпретаторе управления полетом, определение завершенности профиля полета и, в противном случае, подачу команд текущего состояния от интерпретатора управления полетом в систему управления опционально пилотируемым летательным аппаратом, определение наличия вмешательства пилота и управление опционально пилотируемым летательным аппаратом на основании команд текущего состояния. Способ может дополнительно включать осуществление связи с системой управления полетом БАС, используя общую наземную станцию. Способ может включать наблюдение системы датчиков БАС посредством общей наземной станции. Способ может включать отслеживание фактического профиля полета опционально пилотируемого летательного аппарата посредством наземной системы слежения за опционально пилотируемым летательным аппаратом. Способ может включать подтверждение вмешательства пилота и принятия им на себя управления опционально пилотируемым летательным аппаратом. Способ управления опционально пилотируемым летательным аппаратом (OPV) в Национальном воздушном пространстве может включать присоединение беспилотной авиационной системы (БАС) к опционально пилотируемому летательному аппарату, прием управляющих параметров для профиля полета с системой управления полетом БАС и направление управляющих параметров в интерпретатор управления полетом. Способ может также включать прием команд текущего состояния от интерпретатора управления полетом в системе управления полетом опционально пилотируемого летательного аппарата и воспроизведение профиля полета БАС с помощью опционально пилотируемого летательного аппарата. Способ может включать подтверждение вмешательства пилота и принятия им на себя управления опционально пилотируемым летательным аппаратом в случае возникновения чрезвычайной ситуации или непредвиденных обстоятельств.
Имея подробно описанные различные варианты осуществления настоящего изобретения, как это требует патентное законодательство, специалисты в данной области техники могут обнаружить модификации и варианты описанных здесь конкретных вариантов осуществления изобретения. Такие модификации находятся в пределах объема и сущности настоящего изобретения, определенных в следующих пунктах формулы изобретения.
Группа изобретений относится к способу и системе проведения испытаний беспилотной авиационной системы (БАС), а также испытательной системе для БАС с внешней подвеской. Система для проведения испытаний БАС содержит систему управления полетом БАС, опционально пилотируемый летательный аппарат (OPV) с собственной системой управления, интерпретатор управления полетом. Для проведения испытаний БАС прикрепляют фюзеляж БАС к OPV, соединяют систему управления полетом БАС с интерпретатором управления полетом, соединяют последний с системой управления полетом OPV, инициируют профиль полета БАС, подают управляющие параметры от системы управления полетом БАС в интерпретатор управления полетом для их интерпретации, определяют завершенность профиля, в противном случае подают команды текущего состояния от интерпретатора полета в систему управления OPV, определяют наличие вмешательства пилота, управляют OPV на основании команд текущего состояния. Испытательная система для БАС с внешней подвеской содержит систему управления полетом БАС, OPV с собственной системой управления, наземную систему слежения за OPV. OPV несет фюзеляж БАС и интерпретатор управления полетом. Обеспечивается проведение испытаний БАС в соответствии с определенным профилем полета. 3 н. и 9 з.п. ф-лы, 8 ил.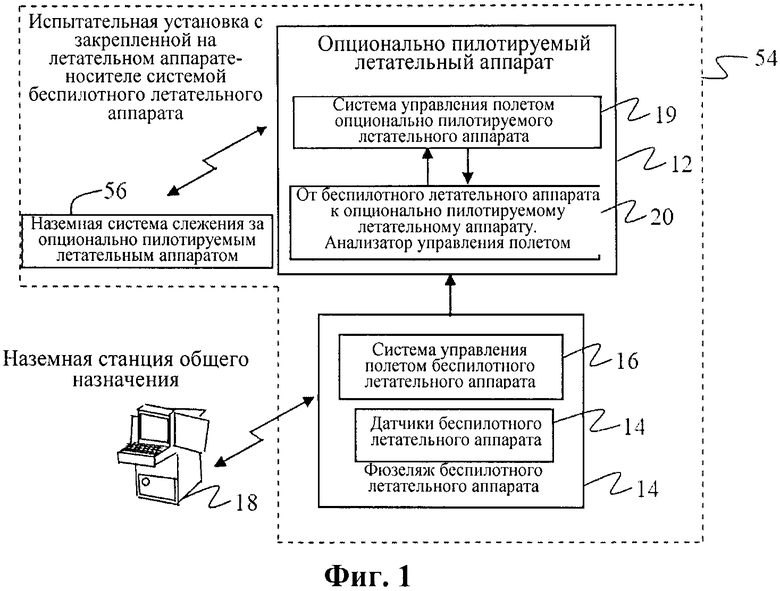
1. Система для проведения испытаний беспилотной авиационной системы (БАС), содержащая:
систему управления полетом БАС;
опционально пилотируемый летательный аппарат, присоединенный к системе управления полетом БАС и содержащий систему управления полетом опционально пилотируемого летательного аппарата; и
интерпретатор управления полетом, выполненный с возможностью приема входных сигналов от системы управления полетом БАС, представляющих собой управляющие параметры для профиля полета БАС,
причем интерпретатор управления полетом обеспечивает команды текущего состояния в качестве выходных сигналов для системы управления полетом опционально пилотируемого летательного аппарата для воспроизведения профиля полета, а
система управления полетом опционально пилотируемого летательного аппарата дополнительно выполнена с обеспечением возможности вмешательства пилота.
2. Система для проведения испытаний БАС по п.1, в которой система управления полетом БАС встроена по меньшей мере в фюзеляж БАС и дополнительно содержит датчики БАС.
3. Система для проведения испытаний БАС по п.1, в которой система управления полетом опционально пилотируемого летательного аппарата содержит автопилот, выполненный с возможностью приема команд текущего состояния от интерпретатора управления полетом.
4. Система для проведения испытаний БАС по п.1, в которой управляющие параметры выбраны из группы, содержащей угловое пространственное положение, навигацию в вертикальной плоскости, навигацию в горизонтальной плоскости, скорость поворота, скорость и работу двигателя.
5. Испытательная система для беспилотной авиационной системы (БАС) с внешней подвеской, содержащая:
по меньшей мере фюзеляж БАС, содержащий систему управления полетом БАС;
опционально пилотируемый летательный аппарат (OPV), содержащий систему управления полетом опционально пилотируемого летательного аппарата, выполненную с обеспечением возможности вмешательства пилота,
причем опционально пилотируемый летательный аппарат несет фюзеляж БАС и интерпретатор управления полетом, выполненный с возможностью приема управляющих параметров от системы управления полетом БАС и обеспечивающий команды текущего состояния для системы управления полетом опционально пилотируемого летательного аппарата для воспроизведения профиля полета БАС; и
наземную систему слежения за опционально пилотируемым летательным аппаратом.
6. Испытательная система для БАС с внешней подвеской по п.5, дополнительно содержащая общую наземную станцию, выполненную с возможностью осуществления связи с системой управления полетом БАС.
7. Испытательная система по п.5, в которой система управления полетом опционально пилотируемого летательного аппарата содержит автопилот, выполненный с возможностью приема команд текущего состояния от интерпретатора управления полетом.
8. Испытательная система по п.5, в которой управляющие параметры выбраны из группы, содержащей угловое пространственное положение, навигацию в вертикальной плоскости, навигацию в горизонтальной плоскости, скорость поворота, скорость и работу двигателя.
9. Способ проведения испытаний беспилотной авиационной системы (БАС) в национальном воздушном пространстве, включающий:
прикрепление по меньшей мере фюзеляжа БАС, содержащего систему управления полетом БАС, к опционально пилотируемому летательному аппарату, содержащему систему управления полетом опционально пилотируемого летательного аппарата, выполненную с обеспечением возможности вмешательства пилота;
соединение системы управления полетом БАС с интерпретатором управления полетом;
соединение интерпретатора управления полетом с системой управления полетом опционально пилотируемого летательного аппарата;
инициирование профиля полета БАС;
подачу управляющих параметров от системы управления полетом БАС в интерпретатор управления полетом;
интерпретацию управляющих параметров в интерпретаторе управления полетом;
определение завершенности профиля полета и, в противном случае, подачу команд текущего состояния от интерпретатора управления полетом в систему управления опционально пилотируемым летательным аппаратом;
определение наличия вмешательства пилота и
управление опционально пилотируемым летательным аппаратом на основании команд текущего состояния.
10. Способ по п.9, дополнительно включающий осуществление связи с системой управления полетом БАС, используя общую наземную станцию.
11. Способ по п.9, дополнительно включающий отслеживание фактического профиля полета опционально пилотируемого летательного аппарата посредством наземной системы слежения за опционально пилотируемым летательным аппаратом.
12. Способ по п.9, дополнительно включающий подтверждение вмешательства пилота и принятия на себя пилотом управления опционально пилотируемым летательным аппаратом.
| Способ получения кислот и нейтральных оксидированных нефтяных масел | 1926 |
|
SU13019A1 |
| US 7130741 B2, 31.10.2006 | |||
| US 6364026 B1, 02.04.2002 | |||
| WO 2006075158 A1, 20.07.2006 | |||
| СПОСОБ И КОМПЛЕКС СРЕДСТВ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2005 |
|
RU2351000C2 |

