Настоящее изобретение относится к способу и устройству пилотирования летательного аппарата, в частности транспортного самолета, вокруг оси пилотирования.
Хотя не исключительно, настоящее изобретение более конкретно применяется к пилотированию самолета вокруг оси крена. Известно, что управление и пилотирование самолета по крену выполняется посредством перемещения аэродинамических профилей крена, т.е. элеронов и/или интерцепторов. Если крыло самолета является достаточно упругим, и если элероны и/или интерцепторы перемещаются относительно динамично, такое пилотирование по крену создает не ничтожно малое возбуждение колебаний конструкции, которое вызывает некомфортные перегрузки от ускорения в кабине самолета.
Стандартное решение по минимизации этого возбуждения колебаний конструкции и повышения тем самым комфорта для пилота и пассажиров состоит в фильтрации перемещений элеронов и интерцепторов с тем, чтобы ослабить высокочастотные компоненты (более 1 Гц) команды пилотирования. Тем не менее, это стандартное решение создает существенную проблему пилотирования, поскольку перемещения элеронов и интерцепторов затем сдвигаются по фазе относительно команд, а это может создавать потерю точности пилотирования, либо фактически нестабильную связь между пилотом и конструкцией самолета.
Настоящее изобретение относится к способу пилотирования летательного аппарата вокруг оси пилотирования, который предоставляет возможность устранить вышеупомянутые недостатки.
Для этой цели согласно изобретению представлен упомянутый способ пилотирования летательного аппарата вокруг оси пилотирования, причем упомянутый летательный аппарат содержит множество N управляемых аэродинамических поверхностей, выполненных с возможностью создавать перемещение летательного аппарата вокруг упомянутой оси пилотирования, при этом согласно способу следующий ряд последовательных операций выполняют автоматически, повторяющимся образом:
a) создают общую команду пилотирования, относящуюся к упомянутой оси пилотирования;
b) на основе этой общей команды пилотирования определяют отдельные команды управления, предназначенные для упомянутых N управляемых аэродинамических поверхностей;
c) упомянутые отдельные команды управления применяют к упомянутым аэродинамическим поверхностям,
отличающийся тем, что:
- на этапе b), на основе упомянутой общей команды пилотирования, формируют N отдельных команд пилотирования, относящихся, соответственно, к упомянутым N аэродинамических поверхностей, путем умножения по каждому случаю упомянутой общей команды пилотирования, по меньшей мере, на один коэффициент Ki усиления, который является положительным или отрицательным, причем i - целое число, варьирующееся от 1 до N, а N - целое число больше 1, при этом упомянутые коэффициенты Ki усиления таковы, что:
 ;
;
они дают возможность уменьшить возбуждение N-1 упругих форм колебаний летательного аппарата, которые являются причиной дискомфорта в последнем, причем эти N-1 упругих форм колебаний выбирают как функцию от текущих значений параметров, относящихся к летательному аппарату;
применяемые совместно, упомянутые N отдельных команд пилотирования создают воздействия, которые соответствуют в целом воздействию упомянутой общей команды пилотирования, в отношении пилотирования летательного аппарата вокруг упомянутой оси пилотирования,
причем эти N команд получают путем решения линейной системы из N-1 уравнений с N неизвестными;
- на этапе b), упомянутые отдельные команды управления далее выводят из упомянутых отдельных команд пилотирования;
- на этапе c), к упомянутым аэродинамическим поверхностям применяют:
сначала только отдельные команды управления, которые выведены из отдельных команд пилотирования, полученных на основе положительных коэффициентов Ki усиления;
после заранее заданной продолжительности - все упомянутые отдельные команды управления, выведенные на этапе b).
Таким образом, в силу изобретения, общая команда пилотирования, отправляемая на различные аэродинамические поверхности с целью снижения возбуждения числа N-1 упругих форм колебаний, которые являются причиной дискомфорта в летательном аппарате, различается. Это дает возможность снижать этот дискомфорт при проведении пилотирования вокруг упомянутой оси пилотирования, что соответствует упомянутой общей команде пилотирования.
Следует отметить, что в структуре настоящего изобретения:
- коэффициенты усиления и значения смещения, заданные ниже, определяют на основе стандартных математических моделей летательного аппарата. Эти коэффициенты усиления и значения смещения зависят от текущих значений параметров, связанных с летательным аппаратом, и в частности скорости и массы летательного аппарата. Коэффициенты усиления и значения смещения в предпочтительном варианте группируются, как функция от параметров, от которой они зависят, в двумерные матрицы. Следовательно, как функция от текущих значений, измеренных из этих параметров в ходе полета, соответствующие коэффициенты усиления и значения смещения выбирают автоматически с помощью этих матриц. Эти коэффициенты усиления и значения смещения могут быть уточнены посредством учета других параметров, которые являются измеряемыми в летательном аппарате;
- упругие формы колебания летательного аппарата распознают, стандартным образом, на основе математических моделей летательного аппарата. Эти упругие формы колебания развертываются в области определения полета летательного аппарата как функция от текущих значений параметров, связанных с упомянутым летательным аппаратом, таких как скорость, масса или число Маха. Следовательно, в качестве функции от текущих значений, измеренных из этих параметров в ходе полета, упомянутые N-1 упругих форм колебаний (возбуждение которых уменьшается) выбирают автоматически, в частности с помощью группировки.
В конкретном варианте осуществления способ в соответствии с настоящим изобретением реализуется в реальном времени на основе измерения скорости летательного аппарата. Таким образом, когда текущая скорость летательного аппарата достигает области определения, где требуется действие, создаваемое посредством реализации изобретения, реализуется упомянутый способ. Активация этой реализации может зависеть от других параметров, в частности упомянутых выше, которые дают возможность определять коэффициенты усиления и значения смещения.
В преимущественном способе упомянутая заранее заданная продолжительность составляет полупериод упругой формы колебаний, которая создает самое отрицательное воздействие для комфорта в летательном аппарате.
В первом варианте осуществления:
- коэффициенты Ki усиления таковы, что сумма  равна нулю;
равна нулю;
- на этапе c):
сначала применяют команды управления, создающие следующее общее воздействие Effg:
при этом различные j - это целые i, для которых соответствующие коэффициенты Kj усиления являются положительными, а Eff(t) - это команда, которая должна отправляться равномерно на N аэродинамических поверхностей для получения общего воздействия N.Eff(t);
после упомянутой заранее заданной продолжительности T применяют команды управления, создающие следующее общее воздействие Effg:

при этом различные ℓ - это целые i, для которых соответствующие коэффициенты Kℓ усиления являются отрицательными.
Более того, во втором варианте осуществления, дающем возможность исключать возможное смещение в команде пилотирования для временного интервала от t=0 до t=T:
- коэффициенты Ki усиления таковы, что сумма  отлична от нуля;
отлична от нуля;
- на этапе c):
сначала применяют команды управления, создающие следующее общее воздействие Effg:
при этом различные j - это целые i, для которых соответствующие коэффициенты Kj усиления являются положительными, Eff(t) - это команда, которая должна отправляться равномерно на N аэродинамических поверхностей для создания общего воздействия N.Eff(t), а KA - это коэффициент усиления, который удовлетворяет следующему соотношению:
после упомянутой заранее заданной продолжительности T применяют команды управления, создающие следующее общее воздействие Effg:
причем различные ℓ - это целые i, для которых соответствующие коэффициенты Kℓ усиления являются отрицательными, а KB - это коэффициент усиления, который удовлетворяет следующему соотношению:

В предпочтительном варианте применения изобретения упомянутая ось пилотирования - это ось крена летательного аппарата, оснащенного двумя крыльями, упомянутые аэродинамические поверхности - это элероны (и/или интерцепторы), которые установлены на упомянутых крыльях, а N - это количество элеронов (и интерцепторов).
Тем не менее, настоящее изобретение также может быть применено к пилотированию по рысканию летательного аппарата, так что в этом случае упомянутая ось пилотирования является осью рыскания летательного аппарата, а упомянутые аэродинамические поверхности являются рулями направления упомянутого летательного аппарата.
Настоящее изобретение также относится к устройству пилотирования летательного аппарата вокруг оси пилотирования, например оси крена или оси рыскания, причем упомянутый летательный аппарат содержит множество N управляемых аэродинамических поверхностей, выполненных с возможностью создавать перемещение летательного аппарата вокруг упомянутой оси пилотирования.
Для этой цели согласно изобретению устройство упомянутого типа содержит:
- первое средство для создания общей команды пилотирования, связанной с упомянутой осью пилотирования;
- второе средство для определения, на основе этой общей команды пилотирования, отдельных команд управления, предназначенных для упомянутых N управляемых аэродинамических поверхностей;
- третье средство для применения упомянутых отдельных команд управления к упомянутым аэродинамическим поверхностям,
отличающееся тем, что:
- упомянутое второе средство содержит средство формирования, на основе упомянутой общей команды пилотирования, N отдельных команд пилотирования, относящихся, соответственно, к упомянутым N аэродинамических поверхностей, путем умножения по каждому случаю упомянутой общей команды пилотирования, по меньшей мере, на один коэффициент Ki усиления, который является положительным или отрицательным, причем i - это целое число, варьирующееся от 1 до N, а N - целое число больше 1, при этом упомянутые коэффициенты Ki усиления таковы, что:
;
они дают возможность уменьшить возбуждение N-1 упругих форм колебаний летательного аппарата, которые являются причиной дискомфорта в последнем, причем N-1 упругих форм колебаний выбираются как функция от текущих значений параметров, относящихся к летательному аппарату;
применяемые совместно упомянутые N отдельных команд пилотирования создают воздействия, которые соответствуют в целом воздействию упомянутой общей команды пилотирования, в отношении пилотирования летательного аппарата вокруг упомянутой оси пилотирования,
причем эти N команд получают путем решения линейной системы из N-1 уравнений с N неизвестными;
- упомянутое второе средство содержит, кроме того, средство вывода упомянутых отдельных команд управления из упомянутых отдельных команд пилотирования;
- упомянутое третье средство сформировано так, чтобы применять к упомянутым аэродинамическим поверхностям:
сначала только отдельные команды управления, которые выведены из отдельных команд пилотирования, полученных на основе положительных коэффициентов Ki усиления;
после упомянутой заранее заданной продолжительности - все упомянутые отдельные команды управления.
Один прилагаемый чертеж истолковывает способ, которым может быть осуществлено изобретение. Этот чертеж является схематичным представлением устройства пилотирования в соответствии с изобретением.
Устройство 1 в соответствии с изобретением, схематично представленное на чертеже, предназначено для пилотирования летательного аппарата, в частности транспортного самолета, вокруг оси пилотирования, например оси крена или оси рыскания. В рамках структуры настоящего изобретения упомянутый летательный аппарат (не представлен) содержит множество N стандартных аэродинамических поверхностей 2A, 2B,..., 2N, которые являются управляемыми и которые допускают создание перемещения летательного аппарата вокруг упомянутой оси пилотирования, причем N - это целое число больше 1.
В предпочтительном варианте применения изобретения упомянутая ось пилотирования - это ось крена летательного аппарата, который соответствует самолету (и который, следовательно, оснащен двумя крыльями), упомянутые аэродинамические поверхности 2A-2N - это элероны и/или интерцепторы, которые установлены на упомянутых крыльях, а N - это количество элеронов и интерцепторов.
Тем не менее, настоящее изобретение также может быть применено к пилотированию по рысканию летательного аппарата, так что в этом случае упомянутая ось пилотирования является осью рыскания летательного аппарата, а упомянутые аэродинамические поверхности 2A-2N являются рулями направления упомянутого летательного аппарата.
Упомянутое устройство 1 имеет тип, содержащий:
- стандартное средство 3, дающее возможность создавать общую команду пилотирования, которая относится к рассматриваемой оси пилотирования. Стандартным образом упомянутое средство 3 содержит, в частности, средство управления, такое как, к примеру, ручку управления или педали управления рулем направления, которые допускают приведение в действие пилотом летательного аппарата. Это средство 3 также содержит набор стандартных источников информации, допускающих измерение текущих значений параметров, связанных с летательным аппаратом, таких как его скорость или число Маха, и определение значений других параметров летательного аппарата, таких как его масса;
- множество средств 4A, 4B, …, 4N, которые соединены посредством линий 5A, 5B, …, 5N связи с упомянутым средством 3 и которые предназначены для того, чтобы определять на основе общей команды пилотирования, принимаемой от упомянутого средства 3, отдельные команды управления, предназначенные, соответственно, для упомянутых N управляемых аэродинамических поверхностей 2A, 2B, …, 2N;
- средства 6A, 6B, …, 6N для примера, стандартные средства активации, которые соединены посредством линий 7A, 7B, …,7N связи с упомянутыми средствами 4A, 4B, …, 4N и которые предназначены для того, чтобы применять отдельные команды управления, принимаемые от упомянутых средств 4A, 4B, …, 4N, к упомянутым аэродинамическим поверхностям 2A, 2B, …, 2N.
Кроме того, согласно изобретению:
- упомянутые средства 4A-4N содержат средства 8A, 8B, …, 8N, которые предназначены для того, чтобы формировать, на основе общей команды пилотирования, принятой от упомянутого средства 3, N отдельные команды пилотирования, относящиеся, соответственно, к упомянутым N аэродинамических поверхностей 2A-2N. Упомянутые средства 8A-8N вычисляют эти отдельные команды пилотирования путем умножения по каждому случаю упомянутой общей команды пилотирования, по меньшей мере, на один коэффициент Ki усиления, который является положительным или отрицательным, причем i - это целое число, варьирующееся от 1 до N, а N - целое число больше 1. Согласно изобретению упомянутые коэффициенты Ki усиления таковы, что следующие условия a)-c) удовлетворяются одновременно:
a)  ;
;
b) они дают возможность уменьшить возбуждение N-1 упругих форм колебаний летательного аппарата, которые являются причиной дискомфорта в последнем, причем эти N-1 упругих форм колебаний выбираются как функция от текущих значений параметров, относящихся к летательному аппарату;
c) применяемые совместно упомянутые N отдельных команд пилотирования создают воздействия, которые соответствуют в целом воздействию упомянутой общей команды пилотирования, в отношении пилотирования летательного аппарата вокруг упомянутой оси пилотирования (оси крена или рыскания);
- упомянутые средства 4A-4N, кроме того, содержат средства 9A-9N, которые соединены посредством линий 10A-10N связи с упомянутыми средствами 8A-8N и которые предназначены для того, чтобы извлекать, стандартным образом, упомянутые отдельные команды управления для упомянутых отдельных команд пилотирования. Соответственно, они выполняют стандартное преобразование;
- упомянутые средства 6A-6N сформированы так, чтобы применять к упомянутым аэродинамическим поверхностям 2A-2N:
сначала (в момент времени t=0) только отдельные команды управления, которые выведены из отдельных команд пилотирования, полученных на основе положительных коэффициентов Ki усиления;
после заранее заданной продолжительности T, указанной ниже (т.е. в момент времени t=T), все упомянутые отдельные команды управления (созданные посредством упомянутых средств 9A-9N).
Известно, что так называемый упругий летательный аппарат обладает множеством упругих форм колебаний (частота примерно между 1 и 15 Гц), многие из которых из наименьших по частоте (а, следовательно, те, на которые наибольшее влияние оказывают люди на борту летательного аппарата) демонстрируют существенное напряжение конструкции летательного аппарата и, в частности, его крыла, где появляются точки с минимальным уровнем вибраций (стационарная точка по отношению к этой форме колебаний) и пучности колебаний (представляющие наиболее высокое напряжение между двумя точками с минимальным уровнем вибраций). Следовательно, упругая форма колебания характеризуется своей частотой, скоростью затухания и геометрическим распределением по пучностям колебаний и точкам с минимальным уровнем вибраций. Поскольку различные аэродинамические поверхности 2A-2N не все находятся в одном месте конструкции, они находятся дальше или ближе к этим пучностям колебаний и точкам с минимальным уровнем вибраций. Эти геометрические характеристики приводят к базовому принципу, используемому в настоящем изобретении, а именно, что при идентичном отклонении различные аэродинамические поверхности 2A-2N не возбуждают либо при одинаковом коэффициенте усиления, либо при одинаковой фазе различные упругие формы колебания, которые влияют на комфорт в кабине летательного аппарата. Таким образом, при N аэродинамических поверхностей 2A-2N существует ряд коэффициентов Ki усиления (i от 1 до N), позволяющих при запросе эффективности Effi от каждой аэродинамической поверхности 2A-2N в значительной мере уменьшать возбуждение N-1 упругих форм колебаний, которые являются причиной дискомфорта в кабине, при удовлетворении следующему уравнению:
которое получается стандартным образом путем решения линейной системы из N-1 уравнений с N неизвестными.
Следует отметить, что в стандартном способе распределение команды DP на N аэродинамических поверхностей, с тем чтобы они не возбуждали одну конкретную упругую форму колебания, эквивалентно решению линейной системы из 1 уравнения с N неизвестными. В рамках структуры настоящего изобретения, поскольку имеется N аэродинамических поверхностей 2A-2N, распределение команды DP таким образом, чтобы не возбуждать N-1 упругие формы колебаний, следовательно, эквивалентно решению линейной системы из N-1 уравнений с N неизвестными.
Решаемая линейная система команды N-1, таким образом, может быть сформулирована:
- N: количество используемых аэродинамических поверхностей;
- M1, M2, …, MN-1: N-1 рассматриваемых упругих форм колебаний;
- 2A, 2B …, 2N: N используемых аэродинамических поверхностей.
Некоторые стремятся уменьшить ускорение, обусловленное конкретной упругой формой колебания Mj, воспринимаемой в конкретной точке Pj летательного аппарата (приборная доска, конкретное пассажирское кресло и т.д.), когда выдается общая команда крена, обозначенная как Eff. Команда Eff нормализуется до 1 и наблюдается максимальная амплитуда ускорения, обусловленная Mj в Pj (частотный анализ ускорения в Pj), воспринимаемая во время применения команды только к аэродинамическому профилю 2i. Эта амплитуда обозначается как Aij.
Следовательно, можно отметить, что для любого i от [1, N], для любого j от [1, N-1] Aij - это амплитуда ускорения в точке Pj летательного аппарата, обусловленная только упругой формой колебания Mj, когда нормализованная команда отклонения отправляется только на аэродинамический профиль 2i. Если одна и та же точка Pj выбирается для всех форм колебаний Mj, некоторые пытаются минимизировать ускорение в точке летательного аппарата. Если выбираются различные точки Pj, это дает возможность минимизировать локальные воздействия гибких форм колебаний в зависимости от того, заставляют или нет они заднюю или переднюю часть летательного аппарата вибрировать больше.
Решаемая линейная система состоит из вычисления N коэффициентов Ki усиления, которые должны быть применены к N аэродинамических профилей 2i, так что для общей команды Eff командой, вычисленной для аэродинамического профиля 2i, является Effi=Ki.Eff, а компонент ускорения гибкой формы колебания Mj в точке Pj является нулем. Эта система из N-1 уравнений с N неизвестными Ki может быть записана:
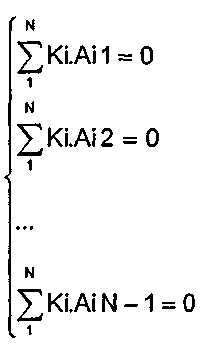
или также:
для любого j∈[1, N-1],
Решение этой системы может быть записано как набор коэффициентов Ki усиления, все пропорциональны коэффициенту K1 усиления, причем значение коэффициента K1 усиления является свободным.
Затем всего лишь остается рассмотреть уравнение  , с тем чтобы зафиксировать значение K1 и, как следствие, всех коэффициентов Ki усиления.
, с тем чтобы зафиксировать значение K1 и, как следствие, всех коэффициентов Ki усиления.
Коэффициенты Ki усиления и ассоциативно связанные значения смещения, указанные ниже, следовательно, определяются, в стандартном способе, на основе стандартных математических моделей летательного аппарата. Эти коэффициенты усиления и значения смещения зависят, в стандартном способе, от текущих значений параметров, связанных с летательным аппаратом, и, в частности, скорости и массы. Эти коэффициенты усиления и значения смещения в предпочтительном варианте являются сгруппированными, как функция от параметров, от которых они зависят, в двумерных матрицах. Следовательно, в качестве функции от текущих значений этих параметров, которые измерены в ходе полета посредством вышеупомянутых информационных источников, средство (формирующее, например, часть упомянутого средства 4A-4N) устройства 1 автоматически выбирает соответствующие коэффициенты усиления и значения смещения с помощью этих матриц, которые в предпочтительном варианте сохраняются. Эти коэффициенты усиления и значения смещения могут быть уточнены посредством учета других параметров, которые являются измеряемыми в летательном аппарате.
Более того, упругие формы колебаний летательного аппарата распознаются, стандартным образом, на основе стандартных математических моделей летательного аппарата. Эти упругие формы колебаний развертываются в области определения полета летательного аппарата как функция от текущих значений параметров, связанных с упомянутым летательным аппаратом, таких как скорость, масса или число Маха. Следовательно, в качестве функции от текущих значений этих параметров, которые измерены в ходе полета посредством вышеупомянутых информационных источников, средство (формирующее, например, часть упомянутого средства 4A-4N) устройства 1 автоматически выбирает N-1 упругих форм колебаний, возбуждение которых должно быть уменьшено посредством устройства 1.
Дополнительно, в конкретном варианте осуществления устройство 1 в соответствии с изобретением активируется на основе измерения (выполняемого посредством одного из вышеупомянутых информационных источников) скорости летательного аппарата. Таким образом, когда текущая скорость летательного аппарата достигает области определения, где требуется действие, создаваемое посредством устройства 1, активируется упомянутое устройство 1. Эта активация может зависеть от других параметров, в частности упомянутых выше, которые дают возможность определять коэффициенты усиления и значения смещения.
Считается, что аэродинамические поверхности 2A-2N все либо совпадают по фазе, либо находятся в противоположных фазах в отношении возбуждения рассматриваемых различных форм колебаний. Следовательно, вышеупомянутые значения смещения предоставляют одно из следующих двух значений: 0 и n. Как следствие, различные коэффициенты Ki усиления являются либо положительными, либо отрицательными. Таким образом, для данной частоты сигнал при t=0 находится в противоположной фазе с тем же сигналом при t=1, где t1 соответствует полупериоду сигнала. Соответственно, может считаться, что для каждой из частот, из которых они состоят, сигналы, которые обладают отрицательным коэффициентом Ki усиления, равны тем же сигналам, умноженным на -1 (поэтому обладают коэффициентом |Ki| усиления), и являются смещением по времени на полупериод рассматриваемой частоты.
Если запрос эффективности Eff(t), отправленный, в стандартном способе, на каждую из N аэродинамических поверхностей 2A-2N, рассматривают при t=0 [следовательно, выполняется общий запрос Effg=N.Eff(t)], этот запрос будет возбуждать упругие формы колебаний, которые вызывают дискомфорт. Если вместо этого стандартного запроса (выполненного выше) следующий запрос выполняют в соответствии с настоящим изобретением:
- при t=0 эффективность Ki.Eff(t) запрашивают от каждой из аэродинамических поверхностей, коэффициент усиления которых является положительным;
- затем, от t=T и далее, эффективность |Ki|.Eff(t-T) запрашивают в дополнение от каждой из аэродинамических поверхностей, коэффициент Ki усиления которых является отрицательным,
запрос, эквивалентный Effg, получают от t=T и далее, но возбуждение N-1 упругих форм колебаний существенно снижено или фактически исключено.
Разумеется, для этой цели выбирают N-1 форм колебаний, которые главным образом влияют на комфорт в летательном аппарате.
Устройство 1 пилотирования в соответствии с изобретением реализует принцип, представленный выше. Соответственно, оно поэтому различает общую команду пилотирования, отправляемую на различные аэродинамические поверхности 2A-2N с целью снижения возбуждения числа N-1 упругих форм колебаний, которые являются причиной дискомфорта в летательном аппарате. Это дает возможность снижать или фактически исключать этот дискомфорт при проведении пилотирования вокруг упомянутой оси пилотирования (оси крена или рыскания), что соответствует упомянутой общей команде пилотирования.
Следует отметить, что упомянутая заранее заданная продолжительность T в предпочтительном варианте (по причинам максимальной эффективности) составляет полупериод упругой формы колебаний (из упомянутых N-1 упругих форм колебаний), которая в большей мере влияет на комфорт в летательном аппарате.
Вариант осуществления, описанный выше, устройства 1 пилотирования в соответствии с изобретением, следовательно, дает возможность, с помощью смещения продолжительности T части команды пилотирования, получать такое же управление (для t больше T), как и в случае стандартного пилотирования, но без упругого возбуждения, которое вызывает дискомфорт.
В первом упрощенном варианте осуществления, для которого коэффициенты Ki усиления таковы, что сумма равна нулю, устройство 1 пилотирования сформировано так, чтобы выполнить следующие операции:
- сначала (при t=0) применять команды управления, создающие следующее общее воздействие Effg:
при этом различные j - это целые i, для которых соответствующие коэффициенты Kj усиления являются положительными, а Eff(t) - это команда, которая должна отправляться равномерно на N аэродинамических поверхностей 2A-2N для получения общего воздействия N.Eff(t);
- после упомянутой заранее заданной продолжительности T (в t=T) применять команды управления, создающие следующее общее воздействие Effg:

при этом различные ℓ - это целые i, для которых соответствующие коэффициенты Kℓ усиления являются отрицательными.
Как указано выше, в стандартной реализации отдельная команда управления DP распределяется идентично по N рассматриваемых аэродинамических поверхностей. В этом случае общая эффективность равна N.DP. С другой стороны, в настоящем изобретении эта команда распределяется по-разному по N аэродинамических поверхностей 2A2N. Каждая отдельная команда DPi демонстрирует отдельный коэффициент Ki усиления и фазу φi, зависимую от частоты, и таким образом удовлетворяет следующему выражению:
DPi=ki.ejφi.DP
Согласно изобретению аппроксимация выполняется путем рассмотрения того, что аэродинамические поверхности 2A-2N либо совпадают по фазе, либо находятся в противоположных фазах. Таким образом, фазы могут быть уменьшены до двух значений 0 и π, и ejφi принимает либо значение 1(=e°), либо значение -1(=ejπ). Следовательно, вышеупомянутые коэффициенты Ki усиления, учитываемые в настоящем изобретении, принимают одно из следующих значений: +ki, -ki. Именно поэтому коэффициенты Ki усиления, используемые в настоящем изобретении, не являются стандартными коэффициентами усиления, представляющими положительные целые числа, а могут быть положительными или отрицательными.
Для каждой из частот, из которых они состоят, сигналы, которые обладают отрицательным коэффициентом Ki усиления, равны тем же сигналам, умноженным на -1 (поэтому обладают коэффициентом |Ki| усиления), и являются смещением по времени на полупериод T рассматриваемой частоты (представляющим смещение π).
Более того, как указано выше, эти коэффициенты Ki усиления (положительные или отрицательные) должны удовлетворять уравнению:
так чтобы сохранять вышеупомянутую общую эффективность Effg=N.DP [разумеется, DP=Eff(t)]. Конкретно, эта общая эффективность Effg может быть записана после упомянутой заранее заданной продолжительности T:

Различные j - это целые i, для которых соответствующие коэффициенты Kj усиления являются положительными, а различные ℓ - это целые i, для которых соответствующие коэффициенты Kℓ усиления являются отрицательными.
Следовательно, получаем:

Поэтому общая эффективность Effg действительно удовлетворяет значению N.DP.
Следует отметить, что при упомянутом первом вышеупомянутом упрощенном варианте осуществления сдвиг в команде пилотирования, тем не менее, может сохраняться в промежутке времени между t=0 и t=T, в течение которого команда пилотирования не полностью выполняется с помощью вышеупомянутого решения.
Чтобы устранить этот недостаток, во втором варианте осуществления, для которого коэффициенты Ki усиления таковы, что сумма отлична от нуля, устройство 1 пилотирования сформировано так, чтобы выполнять следующие операции:
- сначала (при t=0) применять команды управления, создающие следующее общее воздействие Effg:
KA - это коэффициент усиления, который удовлетворяет следующему соотношению:
- после упомянутой заранее заданной продолжительности T (в t=T) применять команды управления, создающие следующее общее воздействие Effg:
причем различные ℓ - это целые i, для которых соответствующие коэффициенты Kℓ усиления являются отрицательными, а KB - это коэффициент усиления, который удовлетворяет следующему соотношению:

Следует отметить, что устройство 1 пилотирования в соответствии с изобретением дает возможность математически исключать возбуждение N-1 упругих форм колебаний, но на практике оно очень эффективно, по меньшей мере, для N колебаний конструкции, поскольку несколько из них демонстрируют очень схожие напряжения. Набор коэффициентов усиления, который подходит для конкретной формы колебаний, разумеется, подходит для других близких форм колебаний с напряжением.
Изобретение относится к управлению летательными аппаратами. Способ и устройство создают возможность перемещения летательного аппарата вокруг оси пилотирования с помощью общей команды пилотирования, на основе которой определяют отдельные команды управления для управления аэродинамическими поверхностями, а также отдельные команды пилотирования путем умножения на коэффициент умножения Ki. Достигается возможность математически исключать возбуждение упругих форм колебаний. 4 н. и 5 з.п. ф-лы, 1 ил.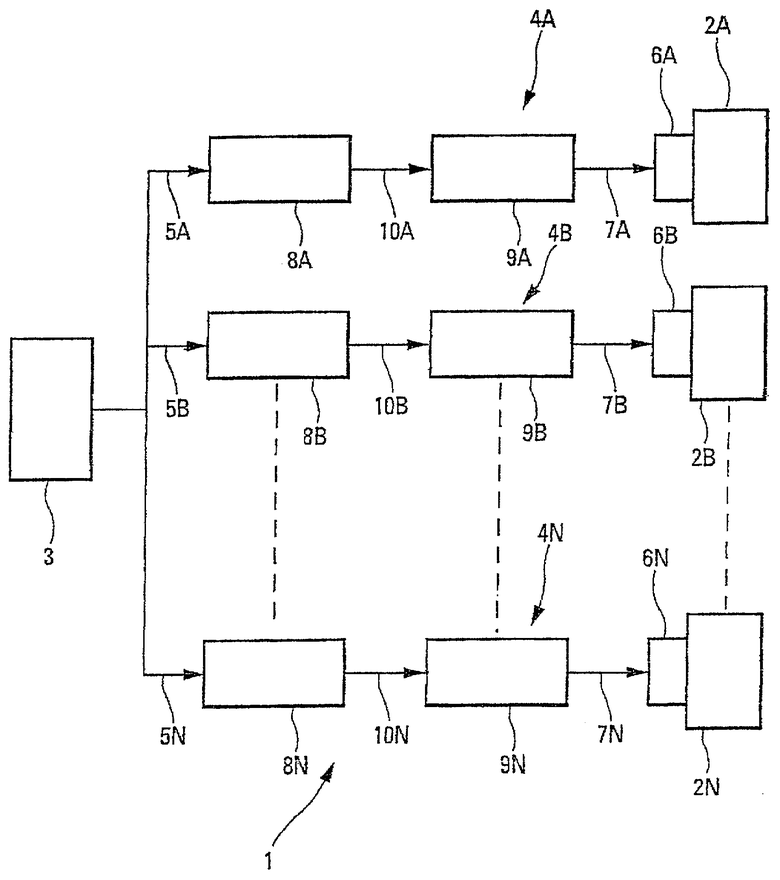
1. Способ пилотирования летательного аппарата вокруг оси пилотирования, причем упомянутый летательный аппарат содержит множество N управляемых аэродинамических поверхностей (2A-2N), выполненных с возможностью создавать перемещение летательного аппарата вокруг упомянутой оси пилотирования, при этом согласно способу следующий ряд последовательных операций выполняется автоматически и повторяющимся образом: а) создают общую команду пилотирования, относящуюся к упомянутой оси пилотирования, b) на основе этой общей команды пилотирования определяют отдельные команды управления, предназначенные для упомянутых N управляемых аэродинамических поверхностей (2A-2N) и с) упомянутые отдельные команды управления применяют к упомянутым аэродинамическим поверхностям (2A-2N), при этом на этапе b) на основе упомянутой общей команды пилотирования формируют N отдельных команд пилотирования, относящихся соответственно к упомянутым N аэродинамических поверхностей (2A-2N) путем умножения по каждому случаю упомянутой общей команды пилотирования, по меньшей мере, на один коэффициент Ki усиления, который является положительным или отрицательным, причем i - целое число, варьирующееся от 1 до N, а N - целое число больше 1, при этом упомянутые коэффициенты Ki усиления таковы, что:  ;
;
они дают возможность уменьшить возбуждение N-1 упругих форм колебаний летательного аппарата, которые являются причиной дискомфорта в последнем, причем эти N-1 упругих форм колебаний выбирают как функцию от текущих значений параметров, относящихся к летательному аппарату, и применяемые совместно упомянутые N отдельных команд пилотирования создают воздействия, которые соответствуют в целом воздействию упомянутой общей команды пилотирования в отношении пилотирования летательного аппарата вокруг упомянутой оси пилотирования, причем эти N команд получают путем решения линейной системы из N-1 уравнений с N неизвестными, на этапе b) упомянутые отдельные команды управления далее выводят из упомянутых отдельных команд пилотирования и на этапе с) к упомянутым аэродинамическим поверхностям (2A-2N) применяют сначала только отдельные команды управления, которые выведены из отдельных команд пилотирования, полученных на основе положительных коэффициентов Ki усиления и после заранее заданной продолжительности - все упомянутые отдельные команды управления, выведенные на этапе b).
2. Способ по п.1, в котором упомянутая заранее заданная продолжительность составляет полупериод упругой формы колебаний, которая создает самое отрицательное воздействие для комфорта в летательном аппарате.
3. Способ по п.1, в котором коэффициенты Ki усиления таковы, что сумма  равна нулю и на этапе с) сначала применяют команды управления, создающие следующее общее воздействие Effg:
равна нулю и на этапе с) сначала применяют команды управления, создающие следующее общее воздействие Effg: 
при этом различные j - это целые i, для которых соответствующие коэффициенты Kj усиления являются положительными, a Eff(t) - это команда, которая должна отправляться равномерно на N аэродинамических поверхностей (2A-2N) для получения общего воздействия N·Eff(t) и после упомянутой заранее заданной продолжительности Т применяют команды управления, создающие следующее общее воздействие Effg:

при этом различные l - это целые i, для которых соответствующие коэффициенты Кl усиления являются отрицательными.
4. Способ по п.1, в котором коэффициенты Ki усиления таковы, что сумма  отлична от нуля и на этапе с) сначала применяют команды управления, создающие следующее общее воздействие Effg:
отлична от нуля и на этапе с) сначала применяют команды управления, создающие следующее общее воздействие Effg:
при этом различные j - это целые i, для которых соответствующие коэффициенты Kj усиления являются положительными, Eff(t) - это команда, которая должна отправляться равномерно на N аэродинамических поверхностей (2A-2N) для создания общего воздействия N·Eff(t), а КА - это коэффициент усиления, который удовлетворяет следующему соотношению:
после упомянутой заранее заданной продолжительности Т применяют команды управления, создающие следующее общее воздействие Effg:
причем различные l - это целые i, для которых соответствующие коэффициенты Kl усиления являются отрицательными, a KB - это коэффициент усиления, который удовлетворяет следующему соотношению: 
5. Способ по п.1, в котором упомянутая ось пилотирования - это ось крена летательного аппарата, оснащенного двумя крыльями, упомянутые аэродинамические поверхности (2A-2N) - это элероны, которые установлены на упомянутых крыльях, а N - это количество элеронов.
6. Способ по п.1, в котором упомянутая ось пилотирования является осью рыскания летательного аппарата, а упомянутые аэродинамические поверхности (2A-2N) являются рулями направления упомянутого летательного аппарата.
7. Устройство пилотирования летательного аппарата вокруг оси пилотирования, причем упомянутый летательный аппарат содержит множество N управляемых аэродинамических поверхностей (2A-2N), выполненных с возможностью создавать перемещение летательного аппарата вокруг упомянутой оси пилотирования, при этом упомянутое устройство (1) содержит
первое средство (3) для создания общей команды пилотирования, связанной с упомянутой осью пилотирования;
второе средство (4A-4N) для определения, на основе этой общей команды пилотирования, отдельных команд управления, предназначенных для упомянутых N управляемых аэродинамических поверхностей (2A-2N); и
третье средство (6A-6N) для применения упомянутых отдельных команд управления к упомянутым аэродинамическим поверхностям (2A-2N), при этом упомянутое второе средство (4A-4N) содержит средство (8A-8N) формирования, на основе упомянутой общей команды пилотирования, N отдельных команд пилотирования, относящихся соответственно к упомянутым N аэродинамических поверхностей (2A-2N), путем умножения по каждому случаю упомянутой общей команды пилотирования, по меньшей мере, на один коэффициент Ki усиления, который является положительным или отрицательным, причем i - целое число, варьирующееся от 1 до N, а N - целое число больше 1, при этом упомянутые коэффициенты Ki усиления таковы, что  ,
,
они дают возможность уменьшить возбуждение N-1 упругих форм колебаний летательного аппарата, которые являются причиной дискомфорта в последнем, причем эти N-1 упругих форм колебаний выбирают как функцию от текущих значений параметров, относящихся к летательному аппарату и применяемые совместно, упомянутые N отдельных команд пилотирования создают воздействия, которые соответствуют в целом воздействию упомянутой общей команды пилотирования, в отношении пилотирования летательного аппарата вокруг упомянутой оси пилотирования, причем эти N команд получают путем решения линейной системы из N-1 уравнений с N неизвестными, упомянутое второе средство (4A-4N) содержит, кроме того, средство (9А-9N) вывода упомянутых отдельных команд управления из упомянутых отдельных команд пилотирования и упомянутое третье средство (6A-6N) сформировано так, чтобы применять к упомянутым аэродинамическим поверхностям (2A-2N) сначала только отдельные команды управления, которые выведены из отдельных команд пилотирования, полученных на основе положительных коэффициентов Кi усиления, и после упомянутой заранее заданной продолжительности - все упомянутые отдельные команды управления.
8. Летательный аппарат, отличающийся тем, что содержит устройство (1), допускающее реализацию способа по любому из пп.1-6.
9. Летательный аппарат, отличающийся тем, что содержит устройство (1), например, как определено в п.7.
| Способ зарядки аккумулятора | 1974 |
|
SU497660A1 |
| RU 93042890 A, 20.10.1996 | |||
| RU 93005488 A, 27.09.1996 | |||
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДАМИ В САМОЛЕТЕ | 2001 |
|
RU2237276C1 |
| Система стабилизации | 1988 |
|
SU1562888A1 |

