Изобретение относится к области авиации. Оно может быть использовано при создании компактных маневренных летательных аппаратов с использованием машущих крыльев с вертикальным взлетом и посадкой.
Известен летательный аппарат (патент РФ N 2138424), состоящий из корпуса с шарнирно установленными крыльями, силовой установки, содержащей энергоблок (баллон с сжатым газом) и два привода машущих движений (для каждого крыла отдельно) и двух блоков управления давлением, которые управляют соответствующими приводами машущих движений. Блок управления соединен с рычагом ручного управления крыльями.
При этом управление пневмоусилителем производится клапанами, реагирующими на нажатия пальцев рук пилота, в результате чего регулируется амплитуда и частота махов (Журнал "Техника молодежи" N 3 2002 г., стр.39). Данная система управления полетом замыкается на пилота, используя все его сенсорные возможности, мышечное чувство, вестибулярный аппарат, интуицию. Для управления движением по курсу и тангажу использован балансирный способ, как у дельтапланов.
Двукрылые аппараты, какой бы процесс махов крыльями они ни совершали, имеют две точки приложения суммарной аэродинамической силы (т.е. система неустойчивая), и устойчивый полет аппарата возможен только при наличии автоматической следящей системы управления, обеспечивающей баланс стабилизирующих сил смещением этих точек относительно центра массы, посредством изменения угла атаки или площади крыльев или того и другого. Исполнение такой системы влечет за собой определенные трудности по реализации быстродействующих исполнительных элементов.
Поскольку крылья являются единым универсальным механизмом, обеспечивающим все потребности устойчивого управляемого полета, то и задачи по проектированию аппарата должны решаться комплексно взаимосвязанно по функциональному признаку, т.е. решив проблему получения необходимой подъемной силы, нельзя разделять функции обеспечения устойчивости и управления как наиболее сложных и ответственных задач, учитывая непредсказуемое поведение "пятого океана". Машущие крылья и тягу создают, и подъемную силу и управляют.
Однако функции обеспечения устойчивости и управления аппаратом разделены и возложены на человеческий фактор, что усложняет пилоту одновременное выполнение операций по обеспечению устойчивого и управляемого полета.
Сущность заявляемого изобретения заключается в решении задачи по функциональной взаимосвязи, упрощающей пилоту обеспечивать устойчивый управляемый полет.
Технический результат - улучшение обеспечения устойчивости летательного аппарата и его управления.
Указанный результат достигается тем, что летательный аппарат содержит по меньшей мере корпус, в котором размещены двигатель с редуктором, а для привода использованы два кривошипно-шатунных механизма, приводящих в колебательные движения силовые валы, которые посредством цепных передач обеспечивают машущие движения четырех симметричных плоских крыльев. Каждое крыло снабжено механизмом вращения, размещенным в корне крыла на центральном лонжероне, который установлен в вилке и вращается в ней в процессе колебательных движений крыла при помощи двух храповых механизмов, каждый из которых состоит из двух дисков. Один диск жестко закреплен на лонжероне крыла и имеет две диаметрально противоположные впадины с опорными поверхностями для зацепления, а другой диск с собачкой может свободно вращаться и выполнен в виде шкива, в ручье которого жестко закреплен один конец троса, а другой конец троса через шкивы, установленные на вилке, закреплен на рычаге управления. Пружины обеспечивают натяжение тросов и надежную работу храповых механизмов.
Улучшение устойчивости достигается тем, что аппарат имеет четыре крыла - четыре точки приложения суммарной аэродинамической силы (т.е. система устойчивая), значения которых можно менять в процессе полета.
Поскольку имеется четыре крыла, то различная комбинация с изменениями подъемной силы на каждом крыле в процессе полета обеспечивает большие возможности по реализации вопросов управления и маневрирования.
В описании изобретения используются прилагаемые чертежи:
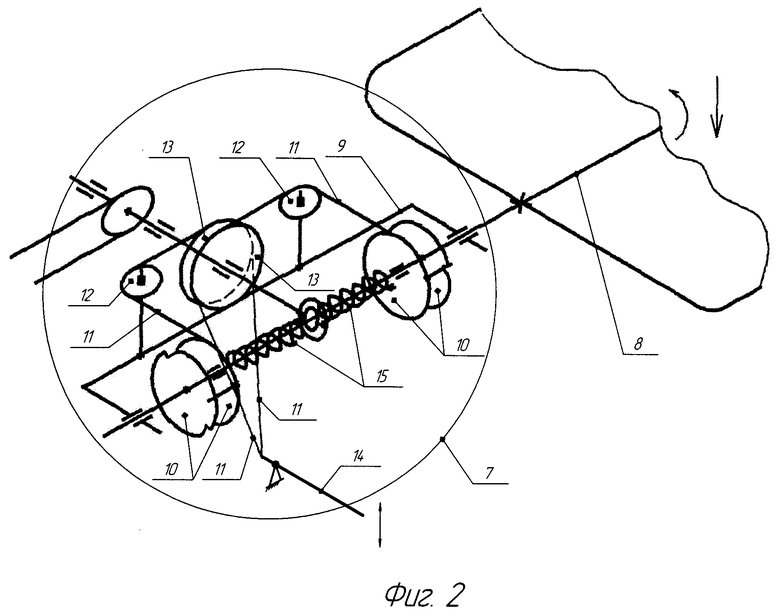
фиг.1 - кинематическая схема летательного аппарата;
фиг.2 - кинематическая схема механизма вращения крыла вокруг продольной оси.
Летательный аппарат (фиг.1) содержит по меньшей мере корпус, в котором размещены двигатель 1 с редуктором 2 и двумя кривошипно-шатунными механизмами 3, приводящими в колебательные движения два силовых вала 4, которые посредством цепных передач 5 обеспечивают машущие движения четырех плоских симметричных крыльев 6, снабженных механизмом 7 вращения крыла вокруг продольной оси (фиг.2).
Механизм вращения расположен в корне крыла на центральном лонжероне 8, который установлен в вилке 9 и вращается в ней в процессе колебательных движений крыла при помощи двух храповых механизмов 10. Каждый храповой механизм состоит из двух дисков, один из которых жестко закреплен на лонжероне крыла и имеет две диаметрально противоположные впадины о опорными поверхностями для зацепления, а другой диск с собачкой может свободно вращаться и выполнен в виде шкива, в ручье которого жестко закреплен один конец троса 11. Другой конец троса через шкивы 12, 13, установленные на вилке, закреплен на рычаге 14 управления. Пружины 15 обеспечивают натяжение тросов и надежную работу храповых механизмов.
Летательный аппарат работает следующим образом.
Каждые два крыла, расположенные симметрично относительно центра массы, одновременно совершают противоположные колебательные движения в вертикальной плоскости по синусоидальному закону. Крылья с помощью механизмов вращения в процессе машущих движений поворачиваются вокруг своих продольных осей, причем так, что в момент нахождения их в горизонтальной плоскости и при движении вниз они располагаются горизонтально, а при движении вверх - вертикально.
Механизм вращения крыла преобразует колебания крыла во вращательное движение центрального лонжерона крыла, причем за одно движение, например сверху вниз, крылья поворачиваются вокруг своих продольных осей на 90 градусов, при следующем движении - снизу вверх еще на 90 градусов.
Таким образом за один цикл движений крылья поворачиваются на 180 градусов, чем и обеспечивается переворот крыльев.
Поочередное срабатывание (зацепление) храповых механизмов происходит при нулевой скорости крыла - в момент нахождения крыла в верхней и нижней мертвых точках. Это обеспечивается жесткой и точной привязкой по фазе вращения крыльев с углом маха и конструктивным исполнением механизма вращения.
Механизмы вращения крыльев позволяют довольно просто и оперативно осуществлять управление полетом во всех направлениях.
Принцип управления основан на изменении активной (пассивной) площади крыльев (площади, приведенной к траектории движения крыльев), путем изменения начального угла установки крыльев в зависимости от необходимого режима полета (маневра).
Конструктивно крылья расположены так, что при начале их движения каждое крыло имеет угол наклона к плоскости движения 45 градусов (начальный угол установки). Наблюдается баланс аэродинамических сил относительно центра массы, который сохраняется и при дальнейшем движении и повороте крыльев, а в момент прохождения ими горизонтальной плоскости (середины угла) два крыла занимают горизонтальное положение, а два других - вертикальное.
При этом получаем максимальную подъемную силу и минимальные потери, что очень важно при максимальной скорости движения крыльев.
Но достаточно нарушить баланс - изменить начальный угол установки (45 градусов) одного крыла (или двух крыльев), как наступает дисбаланс аэродинамических сил, вызывающий наклон аппарата в ту или иную сторону и в результате поворот (разворот) всего аппарата.
Изменение начального угла установки крыла в процессе полета осуществляется рычагом управления, который посредством одновременного (равного по величине) воздействия на тросы, поворачивает диски с собачками храповых механизмов, при этом происходит изменение начального угла установки в сторону увеличения или уменьшения, что в результате приводит к изменению величины подъемной силы.
Динамика работы аппарата обеспечивает в процессе полета компенсацию инерционных сил, возникающих при работе крыльев, за счет симметрии углов маха и инерционных сил относительно центра массы. Поочередно два крыла двигаются вниз, одновременно два других - вверх.
Двухполупериодный процесс создания подъемной силы обеспечивает устойчивость и вертикальный взлет (посадку).
Характер процесса с точки зрения мгновенных значений аэродинамических сил, возникающих на каждом крыле, аналогичен восьмеркообразному движению крыльев насекомых (в частности, стрекозы).
Возможность устройства такого аппарата подтверждена реальной моделью с положительными практическими результатами моделирования.
Испытания и наглядные наблюдения за работой модели с различными параметрами крыльев и частотой махов подтвердили правильность и работоспособность вышеописанных принципов.
Работы и доработки, связанные с поиском оптимальных размеров и конфигурации крыльев, обеспечивающих максимальную подъемную силу, а также для получения весовых и энергетических соотношений привели к следующему результату:
Для наблюдения за работой модели и определения подъемной силы при различных режимах использовались рычажные весы, предназначенные для измерения подъемной силы с вышеуказанными параметрами модели.
Проведя испытания с крыльями, имеющими размах 1 м (длина каждого крыла равна 0,5 м) при частоте махов 2,3 маха в секунду, подъемная сила составила 100 г при потребляемой мощности (Nэ) от питающей сети постоянного тока 20 Вт. При этом полезная мощность (Nм) на валу электродвигателя:
Nм=Nэ×K, где K - к.п.д. мотора.
Анализ технических характеристик электродвигателей постоянного тока с постоянными магнитами подобного исполнения показал, что их к.п.д. составляет не более 40%.
Только самолетные электродвигатели при использовании новых (испарительных или воздушно-испарительных) систем охлаждения имеют к.п.д. 70-76% (В.С.Аскерко "Авиационные электрические машины", стр.51).
Принимая K=0,5, получим:
полезная мощность Nм=20×0,5=10 Вт.
Следовательно, удельная весовая мощность модели составляет 1 кВт/10 кг, или 1 л.с./7,4 кг.
Удельная весовая мощность вертолетов в основном не превышает 1 л.с./2,7 кг("Оружие и технологии России. Энциклопедия XXI век. Военная авиация". Том IV. Издательский дом "Оружие и технологии". М., 2002).
Заявляемое изобретение решает задачу создания простого, надежного летательного аппарата с высокими эксплуатационными характеристиками.
Следует ожидать, что летательные аппараты такого класса будут востребованы в транспортной, сельскохозяйственной, спортивной и оборонной отраслях промышленности в связи с очевидными преимуществами перед вертолетами по экономичности, простоте управления и эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Махолет | 2017 |
|
RU2655582C1 |
| ЛЕТАЮЩИЙ ЗАВОДНОЙ ВЕРТОЛЕТ | 2010 |
|
RU2452871C1 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| ЛЕТАЮЩИЙ ЗАВОДНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2567695C1 |
| БИОАЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 2009 |
|
RU2392189C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| МУСКУЛЬНЫЙ ПЛАВАЮЩИЙ МАХОЛЕТ "ЛЕБЕДУШКА" | 2004 |
|
RU2304546C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2480378C1 |
Изобретение относится к области авиации, в частности к летательным аппаратам с машущими движениями крыльев. Летательный аппарат содержит корпус, в котором размещены двигатель с редуктором и двумя кривошипно-шатунными механизмами. Указанные механизмы приводят в колебательное движение два силовых вала, которые посредством цепных передач обеспечивают машущие движения четырех симметричных крыльев. Крылья снабжены механизмом вращения крыла вокруг продольной оси. Механизм вращения расположен в корне крыла на центральном лонжероне, который установлен в вилке и вращается в ней в процессе колебательных движений крыла при помощи двух храповых механизмов. Каждый храповый механизм состоит из двух дисков, один из которых закреплен на лонжероне крыла, а другой диск, с собачкой, выполнен в виде шкива. Механизм имеет рычаг управления. Решение направлено на улучшение обеспечения устойчивости аппарата и его управления. 2 ил.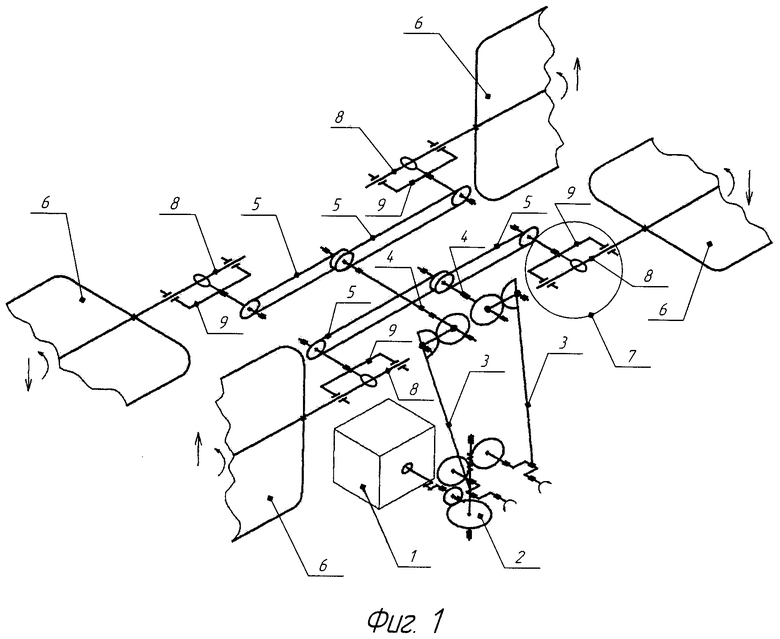
Летательный аппарат, содержащий корпус с шарнирно установленными крыльями, силовую установку и привод машущих движений крыла, отличающийся тем, что силовая установка выполнена в виде двигателя с редуктором, а для привода использованы два кривошипно-шатунных механизма, приводящих в колебательные движения силовые валы, которые посредством цепных передач обеспечивают машущие движения четырех симметричных плоских крыльев, каждое крыло снабжено механизмом вращения, размещенным в корне крыла на центральном лонжероне, который установлен в вилке и вращается в ней в процессе колебательных движений крыла при помощи двух храповых механизмов, каждый из которых состоит из двух дисков, один диск жестко закреплен на лонжероне крыла и имеет две диаметрально противоположные впадины с опорными поверхностями для зацепления, а другой диск с собачкой и пружиной может свободно вращаться и выполнен в виде шкива, в ручье которого жестко закреплен один конец троса, а другой конец троса через шкивы, установленные на вилке, закреплен на рычаге управления.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1997 |
|
RU2138424C1 |
| УЗЕЛ УПРАВЛЕНИЯ КРЫЛОМ МАХОЛЕТА | 2001 |
|
RU2221730C2 |
| УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОП | 0 |
|
SU175301A1 |
| УСТРОЙСТВО для МОЙКИ ИЗДЕЛИЙБЧ5/;И9ТЕКА | 0 |
|
SU322183A1 |

