Изобретение относится к области авиационной техники и предназначено для установки на воздушных судах с целью повышения безопасности полетов воздушных судов с помощью выявления такого опасного явления, как сдвиг ветра, и определения его величины и времени воздействия.
Известные в настоящее время приборы, используемые для определения сдвига ветра, условно можно разделить на три класса в зависимости от способов, положенных в основу [1-3].
Первый способ основан на различной плотности слоев атмосферы, которые определяют путем отраженных от них радиосигналов.
Аппаратура, устанавливаемая на земле, имеет довольно высокую стоимость и дает малую достоверность информации (не более 50%).
Второй способ основан на измерении значений ветра у земли на большой территории и по этим данным с помощью аналитических вычислений определяют возможность появления сдвига ветра в зоне захода на посадку воздушных судов. Недостатком этого способа является его малая точность.
Третий способ основан на сравнении текущих инерциальных (скоростных) и воздушных параметров движения самолета. Принцип работы таких приборов имеет ряд методических ошибок. Так, при заходе на посадку с включенным автоматом тяги (что является наиболее оптимальным заходом по технологии посадки для многих типов воздушных судов) обнаружить сдвиг ветра или невозможно (так как изменение воздушной скорости, вызванное сдвигом ветра, будет компенсироваться увеличением или уменьшением режима работы двигателя), или определение будет производиться со значительными искажениями. Кроме того, кратковременные порывы ветра вносят искажения в точность определения сдвига ветра или даже маскировать его.
Ближайшим техническим решением, принятым за прототип, является устройство для определения сдвига ветра, воздействующего на воздушное судно, включающее датчик ускорений, блок наличия сдвига ветра и информационное табло [2].
Прототип имеет аналогичные недостатки по определению сдвига ветра, основанные на сравнении ускорений в вертикальной плоскости с расчетными параметрами, получаемыми с датчиков приема статического и динамического давления. В результате сдвиг ветра или не будет выявляться, или, если он достаточно большой по величине, определение будет происходить с большой временной задержкой и, что более важно, с достаточно большой погрешностью. В результате у экипажа не будет достаточно времени и информации как по изменению воздушной ситуации, так и по степени ее опасности. Сдвиг ветра в этом случае спровоцирует перегрузку в вертикальной плоскости, а по вышеизложенным причинам воздушное судно отклонится от предписанной траектории захода на посадку. Это приведет или к преждевременной посадке, или к столкновению с наземными препятствиями.
К этому следует добавить, что такое же воздействие (по внешнему проявлению) оказывают как вертикальные порывы ветра, так и посадка в ливневых осадках. К сожалению, вышеназванные приборы в принципе не способны учитывать эти возмущения атмосферы. Следовательно, для полного учета всех вышеперечисленных внешних воздействий на воздушное судно и для повышения безопасности при посадке необходимо, чтобы прибор определял именно перегрузки в вертикальной плоскости, вызванные сдвигом ветра, и выдавал экипажу информацию о степени опасности и рекомендации о последующих действиях, решая задачи дефицита времени и неполноты информации.
В основу изобретения поставлена задача повышения безопасности полетов воздушных судов путем увеличения степени достоверности измерения величины сдвига ветра в реальном времени его воздействия на летальный аппарат, и учета изменения высоты принятия решения при этом, и вывода на электронное табло предписания об уходе на второй круг или на автопилот при автоматическом заходе на посадку.
Поставленная задача достигается тем, что в устройстве для определения сдвига ветра, воздействующего на воздушное судно, включающем датчик ускорений, блок наличия сдвига ветра и информационное табло, согласно изобретению оно снабжено блоком измерения величины сдвига ветра, совмещенным с блоком наличия сдвига ветра, выполненным в виде взаимосвязанных между собой блока вычисления ускорений, вызванных сдвигом ветра, один из входов-выходов которого через блок сравнения текущих значений ускорений с критическими значениями связан с входом интегрального табло выдачи рекомендаций об уходе на второй круг, а другой выход связан с входом блока интегрирования по времени получаемых ускорений, при этом один из входов-выходов блока интегрирования по времени получаемых ускорений через блок сравнения критических значений интеграла по времени с текущими значениями интеграла ускорений по времени соединен через вход с информационным интегральным табло выдачи рекомендаций об уходе на второй круг, причем блок интегрирования по времени получаемых ускорений через вход блока учета влияния сдвига ветра на высоту принятия решения соединен с интегральным табло 14 выдачи информации об изменении высоты принятия решения, при этом устройство включает, по меньшей мере, четыре датчика ускорений, соответственно, два датчика по оси X и два по оси Y, выходы которых связаны с входом блока вычисления ускорений, вызванных сдвигом ветра.
Конструктивно, чтобы устройство было бы снабжено блоком весовых коэффициентов, выходы которого связаны, соответственно, с входами блока вычисления ускорений, вызванных сдвигом ветра, блока сравнения критических значений интеграла по времени с текущими значениями интеграла ускорений по времени и блока учета влияния сдвига ветра на высоту принятия решения.
Устройство может быть снабжено, по меньшей мере, одним датчиком ускорений по оси Z и блоком расчета поправки в ускорение по оси Y, которое вызвано виражом воздушного судна, при этом выход блока расчета поправки соединен с входом блока вычисления ускорений, а вход блока расчета поправки соединен с датчиком ускорений по оси Z и с указателем крена воздушного судна.
Технический результат изобретения проявляется при автоматическом измерении величины сдвига ветра в реальном времени, и принудительном его воздействии на летальный аппарат, и при автоматическом заходе на посадку.
Для лучшего понимания устройство поясняется чертежами, где
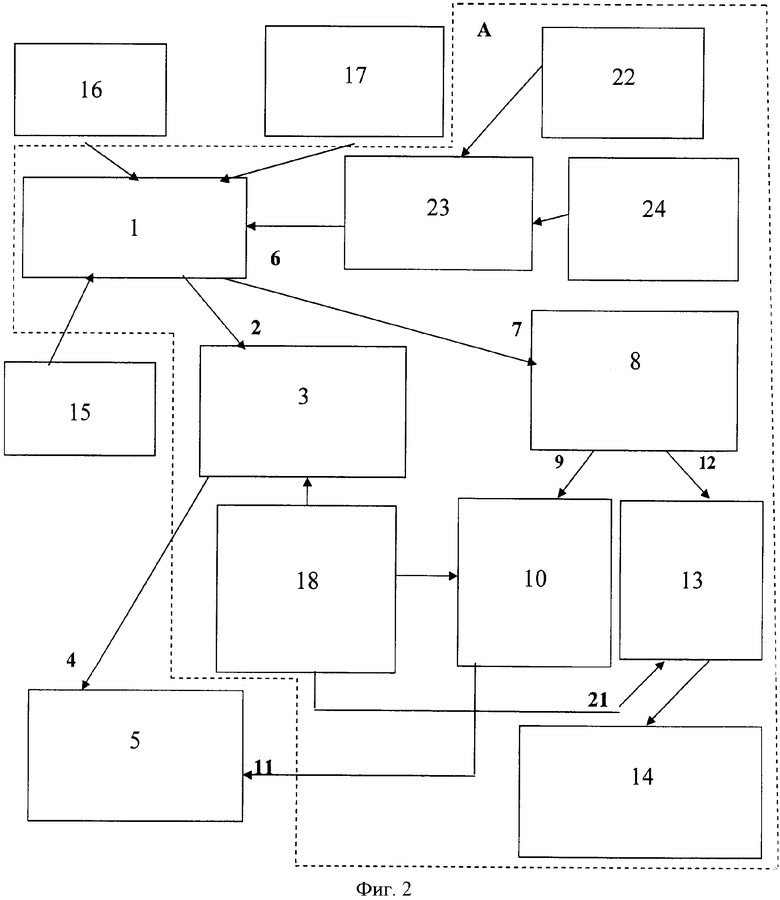
Фиг.1 - общий вид блок схемы устройства с указанием наименования блоков.
Фиг.2 - общий вид блок схемы устройства в позициях.
Устройство для определения величины сдвига ветра в реальном времени его воздействия на воздушное судно включает блок I измерения величины сдвига ветра, совмещенный с блоком наличия сдвига ветра, выполненный в виде взаимосвязанных между собой блока 1 вычисления ускорений, вызванных сдвигом ветра, один из входов-выходов 2 которого через блок 3 сравнения текущих значений ускорений с критическими значениями связан с входом 4 интегрального табло 5 выдачи рекомендаций об уходе на второй круг.
Другой выход 6 связан с входом 7 блока 8 интегрирования по времени получаемых ускорений, при этом один из входов-выходов 9 блока 8 интегрирования по времени получаемых ускорений через блок 10 сравнения критических значений интеграла по времени с текущими значениями интеграла ускорений по времени соединен через вход 11 с информационным интегральным табло 5 выдачи рекомендаций об уходе на второй круг.
Блок 8 интегрирования по времени получаемых ускорений через вход 12 блока 13 учета влияния сдвига ветра на высоту принятия решения соединен с интегральным табло 14 выдачи информации об изменении высоты принятия решения.
Устройство включает датчики ускорений, соответственно, один датчик 15 по оси X и два датчика 16, 17 по оси Y, выходы которых связаны с входом блока 1 вычисления ускорений, вызванных сдвигом ветра.
Устройство может быть снабжено блоком 18 весовых коэффициентов, выходы которого связаны, соответственно, с входами 19, 20, 21 блока 1 вычисления ускорений, вызванных сдвигом ветра, блока 10 сравнения критических значений интеграла по времени с текущими значениями интеграла ускорений по времени и блока 13 учета влияния сдвига ветра на высоту принятия решения.
Блок 18 весовых коэффициентов учитывает величину посадочного веса.
Устройство может быть снабжено, по меньшей мере, одним датчиком 22 ускорений по оси Z и блоком 23 расчета поправки в ускорение по оси Y, которое вызвано виражом воздушного судна, при этом выход блока 23 расчета поправки соединен с входом блока 1 вычисления ускорений, а вход блока 23 расчета поправки соединен с датчиком 22 ускорений по оси Z и с указателем 24 крена воздушного судна.
Для увеличения достоверности вычислений ускорений устройство дополнительно снабжено датчиком ускорений 25 по оси X и блоком 26 указателя угла атаки, выходы которых связаны с входом блока 1 вычисления ускорений, вызванных сдвигом ветра.
Работа устройства для определения величины сдвига ветра в реальном времени его воздействия на воздушное судно осуществляется следующим образом.
При попадании воздушного судна (ВС) в условия сдвига ветра появляются ускорения, вызванные этим опасным метеорологическим явлением. Эти ускорения замеряют четырьмя датчиками ускорений, соответственно, двумя датчиками 15 и 25 по оси X и двумя датчиками 16 и 17 по оси Y, выходы которых связаны с входом блока 1 вычисления ускорений, вызванных сдвигом ветра.
Теоретически была рассчитана корреляционная зависимость между величиной сдвига ветра и ускорениями, которые это явление вызывает. Но ВС также подвергается и другим воздействиям, провоцирующим появление сопутствующих ускорений.
До настоящего времени разделить ускорения, вычленить из общей суммы ускорений только связанные со сдвигом ветра не представлялось возможным.
Теоретические расчеты показали, что алгоритмы зависимостей ускорений, по осям X и Y, вызванных разными причинами, различаются, следовательно, имеется возможность их аналитического разделения и вычисления.
Таким образом, в блоке 1 «вычисления ускорений, вызванных сдвигом ветра», - из суммы всех ускорений, которые воздействуют на ВС, - выделяют только те, которые связаны со сдвигом ветра. Для осуществления прецизионных вычислений ускорений, вызванных сдвигом ветра, в блок 1 корректирующие данные вводят дополнительным блоком 26 указателя угла атаки. В данные, поступающие в блок 1 с блока 26 указателя угла атаки, вносят необходимые вводные для точных вычислений ускорений, вызванных сдвигом ветра.
В блоке 3 сравнения идет сравнение текущих значений ускорений с критическими, возникающими при опасном сдвиге ветра, при которых необходим уход на второй круг. При достижении текущих значений критических величин через интегральное табло 5 экипажу выдают предписание о немедленном уходе на второй круг.
Из блока 1 вычисления ускорений, вызванных сдвигом ветра, через выход 2 вводят величины ускорений в блок 3 сравнения текущих значений ускорений с критическими значениями и из блока 3 через вход 4 подают сигнал на интегральное табло 5 выдачи предписания об уходе на второй круг.
Через другой выход 6 информация с блока 1 вычисления ускорений поступает на вход 7 блока 8 интегрирования по времени получаемых ускорений, интегральные значения которых через вход-выход 9 блока 8 интегрирования по времени получаемых ускорений поступают в блок 10 сравнения критических значений интеграла по времени с текущими значениями интеграла ускорений по времени, из которого через вход 11 информацию выводят на информационное интегральное табло 5 выдачи предписания об уходе на второй круг.
Одновременно интегральные значения ускорений из блока 8 интегрирования по времени получаемых ускорений поступают на вход 12 блока 13 учета влияния сдвига ветра на высоту принятия решения и откуда информацию выводят на интегральное табло 14 выдачи предписания об изменении высоты принятия решения.
Через выходы 19, 20, 21 блока 18 весовых коэффициентов корректирующая информация об изменении критических значениях, соответственно, поступает в блок 3 сравнения текущих значений ускорений, вызванных сдвигом ветра, блок 10 сравнения критических значений интеграла по времени с текущими значениями интеграла ускорений по времени и блок 13 учета влияния сдвига ветра на высоту принятия решения.
Блок весовых коэффициентов необходим для учета меняющихся значений энергетических возможностей воздушного судна, которые напрямую связаны с посадочным весом. Учитывая же что одна и та же величина сдвига ветра тем сильнее влияет на воздушное судно, чем большую скорость имеет самолет при заходе на посадку, необходимо устанавливать различные критические значения для каждой категории воздушного судна (А, В, С или D согласно классификации ИКАО). К примеру, расчеты и моделирование показали, что, если для категории С сдвиг ветра в 2 м/с на 30 м высоты может быть опасен, то для категории В такая величина сдвига ветра не представляет опасности. Поэтому в зависимости от того, на какой категории воздушного судна будет устанавливаться заявляемый прибор, критические значения сдвига ветра, используемые в расчетах алгоритмов, будут различны.
При совершении виража воздушным судном возникающее центробежное ускорение вносит погрешность в работу всего устройства. Для учета этой погрешности датчиком 22 замеряют значение ускорений по оси Z. Для исключения этого возмущающего ускорения блоком 23 вводят расчет поправки в ускорение по оси Y. Для обеспечения работы блока 23 в него вводят информацию со штатного указателя угла крена воздушного судна.
Изобретение по сравнению с известным уровнем техники позволяет замерять перегрузки по вертикальной оси заходящего на посадку воздушного судна и вычислять ускорения, не связанные с действиями экипажа как по управлению воздушным судном в вертикальной плоскости, так и по изменению режимов работы двигателей. Ускорения, вычисленные по определенному алгоритму, будут показывать величину внешних воздействий на воздушное судно, независимо от природы их проявления. Проведенные расчеты и моделирование устройства позволили установить критические величины определяемых ускорений, при которых необходимо начать немедленный уход на второй круг, а также определенные дискретные значения ускорений, влияющие на высоту принятия решения.
Кроме того, введение в прибор интегратора этих ускорений по времени позволяет учитывать уменьшение энергетических возможностей воздушного лайнера из-за увеличения режима работы двигателей, ввиду уменьшения свободной мощности воздушного судна энергетические возможности его уменьшаются, а значит и «просадка» воздушного судна при уходе на второй круг будет больше. Аналогичная картина наблюдается и при увеличении угла атаки с целью компенсации «просадки» при борьбе с отрицательным сдвигом ветра. Перегрузка при уходе на второй круг в этом случае может оказаться меньше рекомендованной Руководством полетной эксплуатации. Следовательно, и высота принятия решения в этом случае также должна быть увеличена. Учет этих изменений, влияющих на безопасный уход на второй круг в условиях сдвига ветра, позволит выполнить рекомендации ИКАО, предписывающие учитывать изменения высоты принятия решения в зависимости от величины сдвига ветра (или приведенных к этому аналогу других возмущений атмосферы).
Промышленное освоение устройства предполагается на территории СНГ.
Источники информации
1. Ален Дэнзье, Жан-Мишель Фаж. Исследования в области обнаружения сдвига ветра с помощью радаров продолжаются. Бюллетень ИКАО 1986, №4, с.15-18.
Система обнаружения сдвига ветра на малых высотах в виде сети акселерометров, расположенных по периферии аэродромов, LLWSAS.
2. RU 2032148, G01C 21/10 публ. 27.03.1995 Система обнаружения сдвига ветра.
3. US 5359888, публ. 11.01.1994. Устройство для определения сдвига ветра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интеллектуальная система поддержки экипажа летательного аппарата | 2024 |
|
RU2839176C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ СИСТЕМА НАВИГАЦИИ СРЕДНЕЙ ТОЧНОСТИ ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2539140C1 |
| Способ выявления неисправностей и отказов бортовых измерителей параметров движения и спутниковых навигационных систем движущихся объектов | 2017 |
|
RU2668597C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2017 |
|
RU2658469C1 |
Изобретение относится к области приборостроения и предназначено для установки на воздушных судах с целью повышения безопасности полетов воздушных судов на основе измерения сдвига ветра, определения его величины и времени воздействия. Технический результат - расширение функциональных возможностей. Для достижения данного результата устройство содержит блок I измерения величины сдвига ветра, один из входов-выходов 2 которого через блок 3 сравнения соединен с входом 4 интегрального табло 5 выдачи рекомендаций об уходе на второй круг. Второй выход 6 соединен с входом 7 блока 8 интегрирования. Блок 8 интегрирования через вход 12 блока 13 соединен с интегральным табло 14 выдачи информации об изменении высоты принятия решения. Устройство включает датчики ускорений, соответственно, один датчик 15 по оси Х и два датчика 16, 17 по оси Y, выходы которых связаны с входом блока 1 вычисления ускорений, вызванных сдвигом ветра. 2 з.п. ф-лы, 2 ил.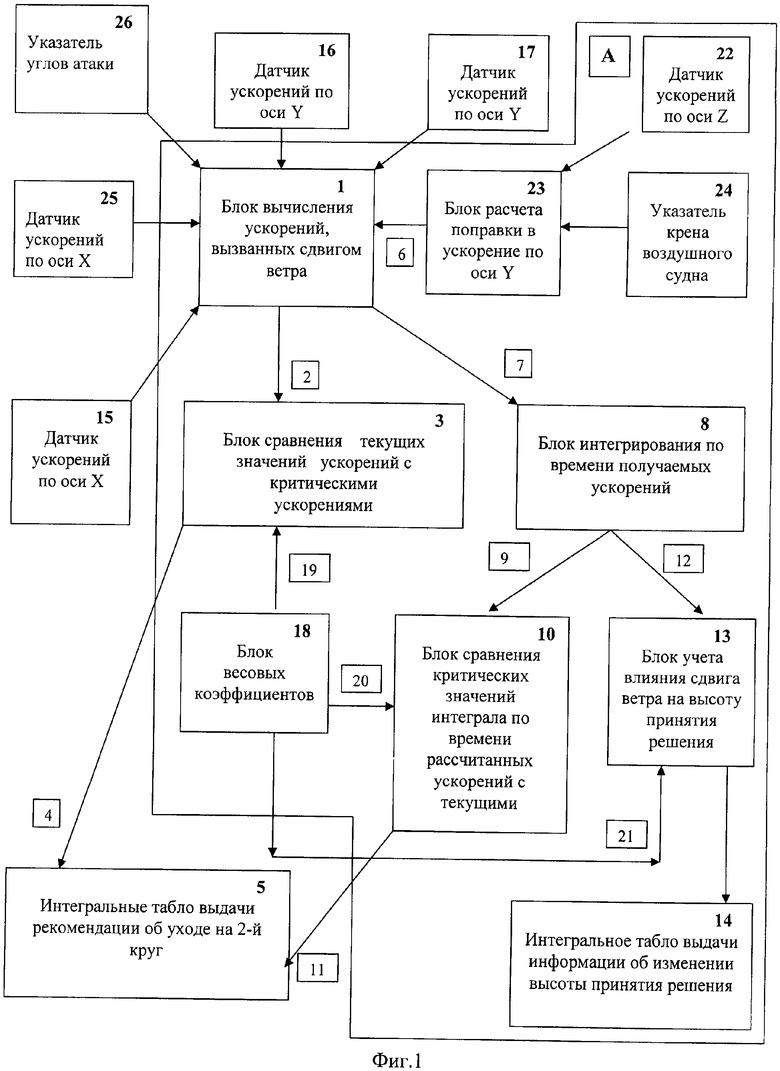
1. Устройство для определения сдвига ветра, воздействующего на воздушное судно, включающее датчик ускорений, блок наличия сдвига ветра и информационное табло, отличающееся тем, что оно снабжено блоком измерения величины сдвига ветра, совмещенным с блоком наличия сдвига ветра, выполненным в виде взаимосвязанных между собой блока вычисления ускорений, вызванных сдвигом ветра, один из входов-выходов которого через блок сравнения текущих значений ускорений с критическими значениями связан с входом интегрального табло выдачи рекомендаций об уходе на второй круг, а другой выход связан с входом блока интегрирования по времени получаемых ускорений, при этом один из входов-выходов блока интегрирования по времени получаемых ускорений через блок сравнения критических значений интеграла по времени с текущими значениями интеграла ускорений по времени соединен через вход с информационным интегральным табло 5 выдачи рекомендаций об уходе на второй круг, причем блок интегрирования по времени получаемых ускорений через вход блока учета влияния сдвига ветра на высоту принятия решения соединен с интегральным табло выдачи информации об изменении высоты принятия решения, при этом устройство включает, по меньшей мере, четыре датчика ускорений, соответственно, два датчика по оси Х и два по оси Y, выходы которых связаны с входом блока вычисления ускорений, вызванных сдвигом ветра.
2. Устройство по п 1, отличающееся тем, что оно снабжено блоком весовых коэффициентов, выходы которого связаны, соответственно, с входами блока вычисления ускорений, вызванных сдвигом ветра, блока сравнения критических значений интеграла по времени с текущими значениями интеграла ускорений по времени и блока учета влияния сдвига ветра на высоту принятия решения.
3. Устройство по п 1, отличающееся тем, что оно снабжено, по меньшей мере, одним датчиком ускорений по оси Z и блоком расчета поправки в ускорение по оси Y, которое вызвано виражом воздушного судна, при этом выход блока расчета поправки соединен с входом блока вычисления ускорений, а вход блока расчета поправки соединен с датчиком ускорений по оси Z и с указателем крена воздушного судна.
| US 5359888 А, 11.01.1994 | |||
| СИСТЕМА ОБНАРУЖЕНИЯ СДВИГА ВЕТРА | 1991 |
|
RU2032148C1 |
| АЛЕН ДЭНЗЬЕ, ЖАН-МИШЕЛЬ ФАЖ | |||
| Исследования в области обнаружения сдвига ветра с помощью радаров продолжаются | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| US 3935460 А, 27.01.1976 | |||
| Способ управления процессом непрерывной разливки металла и устройство для его осуществления | 1988 |
|
SU1502178A1 |

