Предлагаемое изобретение относится к машиностроению, а именно к захватным устройствам промышленных роботов и манипуляторов для автоматизации сборочных операций и технологических операций загрузки -разгрузки заготовок и деталей.
Известно устройство робота для загрузки станка [Robot for maching tool and maching tool. Патент US 2018056503, Кл. В25J 15/00], который может работать с большой мощностью и крутящим моментом, когда это необходимо, присоединяя большой мотор к роботу, при этом используя, небольшой манипулятор, а также к станку с роботом. Механизм станочного робота включает в себя входной вал, передаточный вал, коническую шестерню и оконечный рабочий орган. Входной вал соединен с механизмом станка, и движущая сила механизма передается на рабочий орган. Рабочий орган представляет собой манипулятор? и заготовка захватывается и поворачивается с манипулятором, используя движущую силу механизма станка. Предусмотрено множество типоразмеров входных валов, и соответствующий входной вал соединяется с соответствующим инструментом.
Данный механизм и конструкция рабочего органа манипулятора предназначена для большого количества типоразмеров заготовок и использует энергию станка, что усложняет конструкцию захватного устройства.
Наиболее близким (прототипом) является устройство [Схват манипулятора. Патент RU №2347674, Кл. В25J 15/00], содержащее корпус, зажимные элементы, кинематически связанные между собой зубчатой передачей, и зубчатые колеса, сблокированные на одной оси, причем, зубчатые колеса представляют собой шестерню и червячное колесо, схват содержит цилиндрический прямозубый редукционный механизм, содержащий кольцевые зубчатые сегменты, выполненные с внутренним и внешним зацеплением с обеспечением кинематической связи с шестерней и движения по выполненным в корпусе направляющим элементам боковых поверхностей и проточкам, при этом червяк, вращающий червячное колесо, надет на вал электродвигателя, закрепленного на корпусе схвата с проточками, в котором смонтирован прижимной ролик, а зажимные элементы выполнены сменными и закреплены штифтами на кольцевых зубчатых сегментах.
Недостатком устройства является передача, которая требует дополнительных элементов для надежной фиксации объекта манипулирования и привод, ограничивающий возможность автоматизации сборочных и технологических операций по перемещению объектов и область применения устройства.
Задачей изобретения является упрощение конструкции и расширение возможностей захватного устройства для выполнения технологических операций.
Поставленная задача решается тем, что предлагается захватное устройство манипулятора, снабженное корпусом с проточками, сменными зажимными элементами на штифтах, кинематически связанными между собой зубчатой передачей с кольцевыми зубчатыми сегментами и прижимными роликами, прямозубым редукционным зубчатым механизмом и червячной передачей. Устройство содержит сменные зажимные элементы, закрепленные штифтами на симметрично расположенных кольцевых зубчатых сегментах цилиндрического прямозубого редукционного механизма с внутренним зацеплением, с промежуточным зубчатым колесом привода и кинематически связаны с шестерней, сблокированной на одной оси с коническим редукционным механизмом в виде ведущего и ведомого конических зубчатых колес и червячным колесом, при этом червяк, вращающий колесо, одет на вал электродвигателя, закрепленного в корпусе захвата с байонетным разъемом и с проточками, в котором смонтированы прижимные ролики».
Сравнительный анализ с прототипом показал, что предложенное устройство отличается тем, что оно содержит сменные зажимные элементы, закрепленные штифтами на симметрично расположенных кольцевых зубчатых сегментах цилиндрического прямозубого редукционного механизма с внутренним зацеплением, с промежуточным зубчатым колесом привода и кинематически связаны с червячным колесом, сблокированным на одной оси с коническим редукционным механизмом в виде ведущего и ведомого конических зубчатых колес и червяком, при этом червяк, вращающий колесо, одет на вал электродвигателя, закрепленного в корпусе захвата с байонетным разъемом и с проточками, в котором смонтированы прижимные ролики.
Перечень фигур:
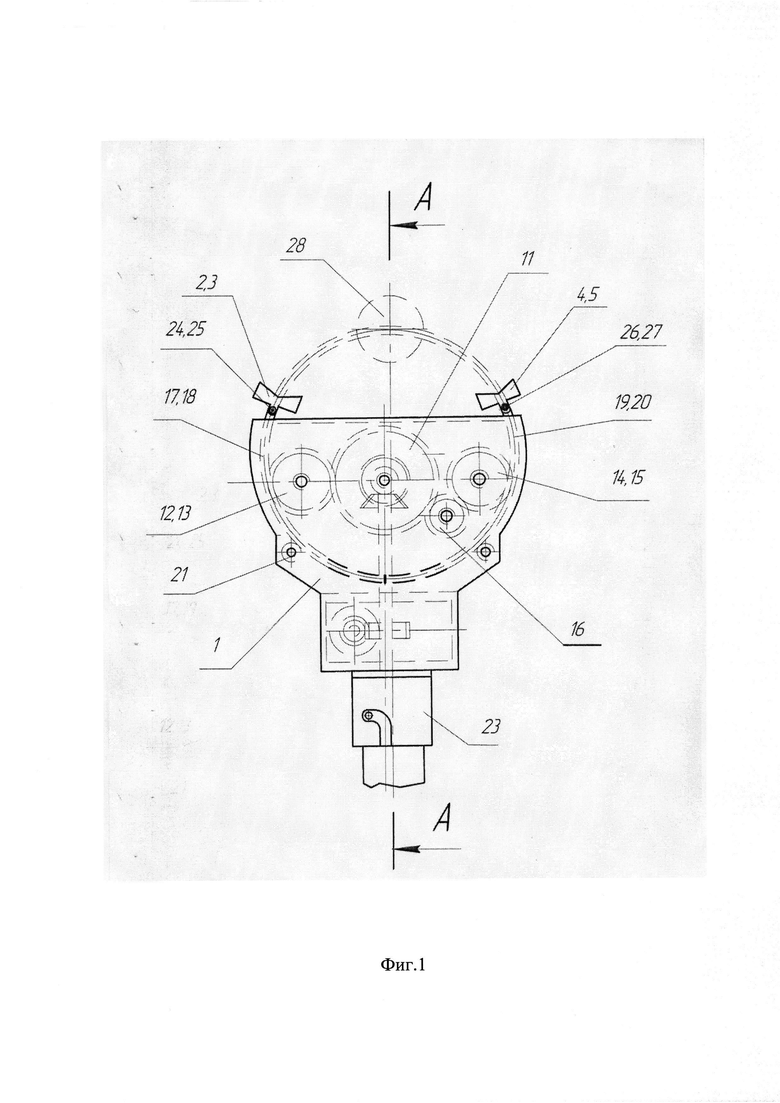
Фиг. 1. Захватное устройство манипулятора.
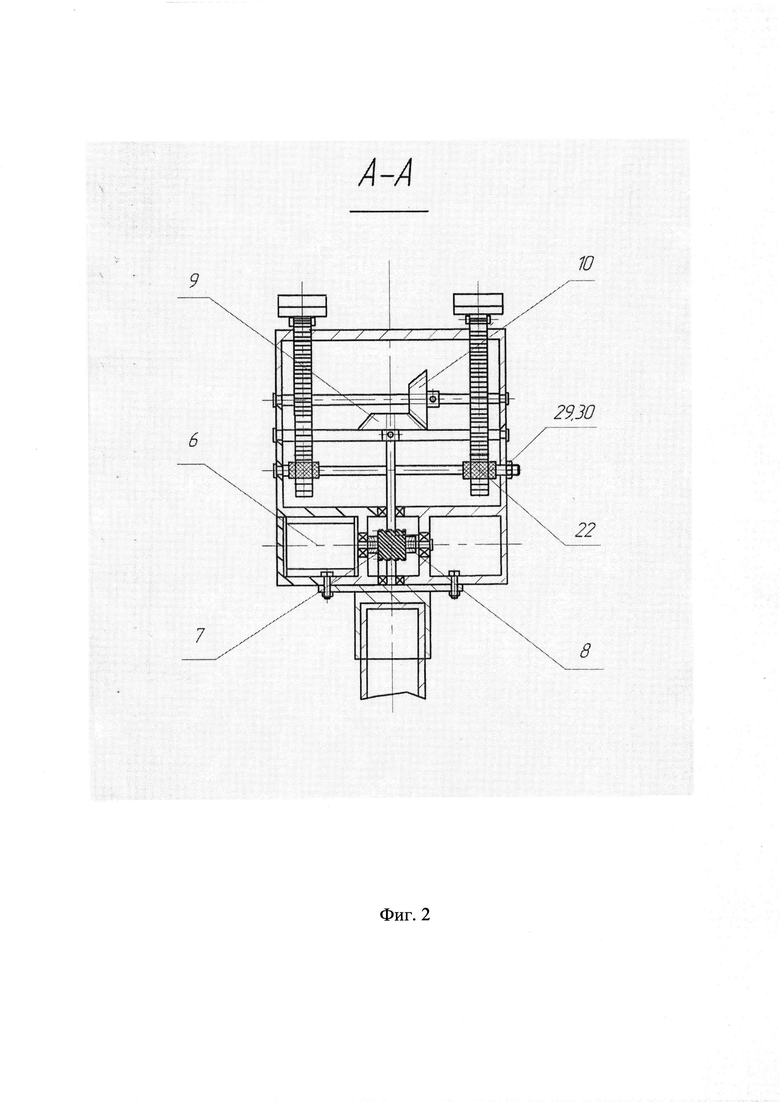
Фиг. 2. Захватное устройство манипулятора, вид. А (фиг. 1).
Фиг. 3. Зажимной элемент.
Сущность представленного технического решения поясняется чертежом (фиг. 1, фиг. 2, фиг. 3). Предложенный механизм устройства содержит корпус 1, сменные зажимные элементы 2, 3, 4, 5, электродвигатель 6, червяк 7, червячное колесо 8, ведущее коническое зубчатое колесо 9, ведомое коническое зубчатое колесо 10, ведущее зубчатое колесо 11, зубчатые колеса привода кольцевых зубчатых сегментов 12, 13, 14, 15, промежуточное зубчатое колесо 16, кольцевые зубчатые сегменты 17, 18, 19, 20, прижимные обрезиненные ролики 21, 22, байонетный разъем 23, штифты 24, 25, 26, 27, захватываемый объект 28 и гайки 29, 30.
Устройство работает следующим образом (фиг. 1, фиг. 2, фиг. 3). Электродвигатель 6, закрепленный на корпусе 1 с байонетным разъемом 23, вращая расположенный на оси червяк 7, передает вращение на червячное колесо 8 и сблокированное с ним на одном валу ведущее коническое колесо 9, вращающее ведомое коническое колесо 10 и сблокированное на одной оси с ним зубчатое колесо 11, передающее вращение зубчатому колесу 15 и зубчатым колесам 13, 14, 15, 16, которые сообщают круговое движение кольцевым зубчатым сегментам 17, 18, 19, 20 симметричного цилиндрического прямозубого редукционного механизма по направляющим элементам боковых поверхностей и кольцевым проточкам корпуса 1, на которых штифтами 24, 25, 26, 27 закреплены сменные зажимные элементы 2, 3, 4, 5, захватывающие объект 28 и обеспечивающие возможность захвата протяженных объектов как цилиндрической, так и плоской формы в ограниченном пространстве конфигураций.
Центры качания сменных зажимных элементов 2, 3 и 4, 5 перемещаются по окружностям, диаметры которых проходят через центры кольцевых зубчатых сегментов 15, 16, 17, 18, поэтому пространственные координаты центра захватываемого объекта 26 не изменяются.
Сменные зажимные элементы 2, 3, 4, 5 могут быть выполнены из упругого гибкого материала для лучшего контакта с поверхностями объекта 28.
Прижимные ролики 21, 22 закреплены гайками 29, 30 в корпусе 1 для устранения зазоров и люфта.
Применение устройства позволит повысить точность и надежность захвата и удержания объекта, повысить производительность операций перемещения протяженных объектов цилиндрической и плоской формы, и сборочных операций в условиях ограниченного пространства конфигураций манипулятора. Повышение эффективности захватных устройств подобного типа основано на применении цилиндрического прямозубого редукционного механизма с раздельным подключением симметрично расположенных кольцевых зубчатых сегментов со сменными зажимными элементами, что позволит повысить уровень автоматизации и эффективность производства, снизить себестоимость изделий и тем самым повысить конкурентоспособность предложенного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| Стыковочное устройство робота | 1989 |
|
SU1627403A1 |
| Устройство для вырезания днищ бочек | 1985 |
|
SU1339057A1 |
| Захват | 1981 |
|
SU971646A1 |
| СХВАТ МАНИПУЛЯТОРА | 2008 |
|
RU2381892C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ УСТАНОВКА ДЛЯ ШЛИФОВАНИЯ И ЗАМЕНЫ СЪЕМНЫХ КОНЦОВ ЭЛЕКТРОДОВ | 2015 |
|
RU2618045C1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Двухместное захватное устройство | 1986 |
|
SU1316815A1 |
| Кисть механической руки промышленногоРОбОТА | 1979 |
|
SU841961A1 |
| Захват промышленного робота | 1985 |
|
SU1310202A1 |

Изобретение относится к машиностроению, а именно к захватным устройствам промышленных роботов и манипуляторов для автоматизации технологических операций перемещения объектов и сборки в условиях ограниченного пространства конфигураций. Захватное устройство содержит корпус с проточками, сменные зажимные элементы на штифтах, кинематически связанными между собой зубчатой передачей с кольцевыми зубчатыми сегментами и прижимными роликами, прямозубый редукционный зубчатый механизм и червячную передачу. При этом сменные зажимные элементы закреплены штифтами на симметрично расположенных кольцевых зубчатых сегментах цилиндрического прямозубого редукционного механизма с внутренним зацеплением, и кинематически связаны с промежуточным зубчатым колесом привода и с шестерней, сблокированной на одной оси с коническим редукционным механизмом в виде ведущего и ведомого конических зубчатых колес и червячным колесом, при этом червяк, вращающий колесо, одет на вал электродвигателя, закрепленного в корпусе захвата с байонетным разъемом и с проточками, в котором смонтированы упомянутые прижимные ролики. Изобретение позволяет повысить точность и надежность захвата и удержания объекта. 3 ил.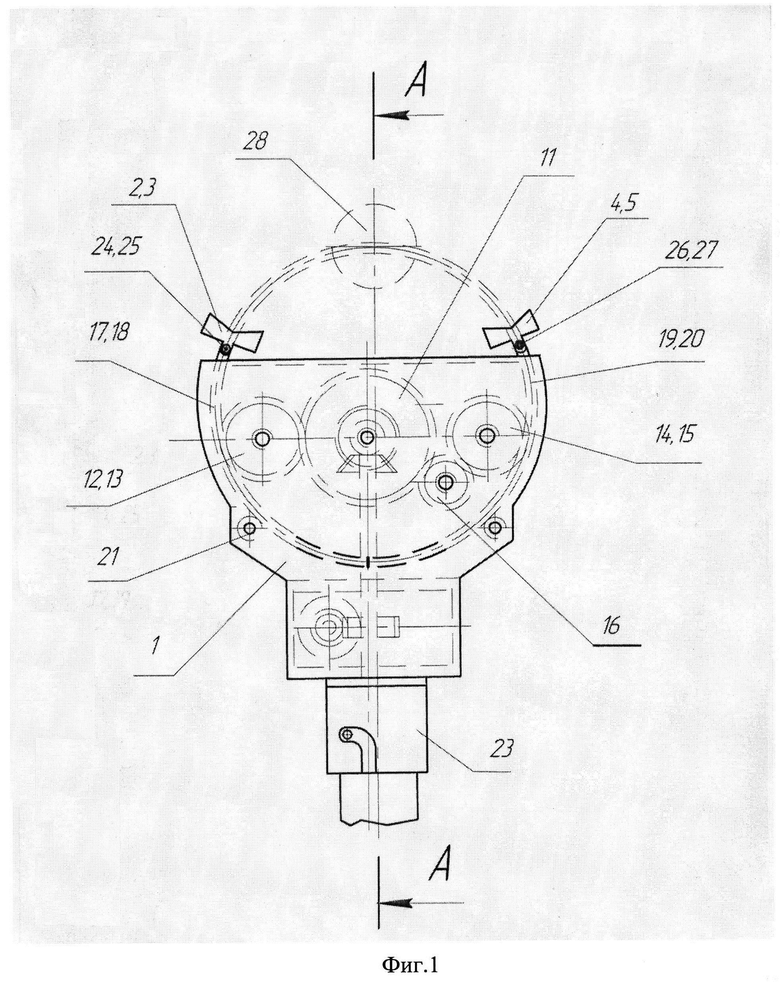
Захватное устройство манипулятора, содержащее корпус с проточками, сменные зажимные элементы на штифтах, кинематически связанные между собой зубчатой передачей с кольцевыми зубчатыми сегментами и прижимными роликами, прямозубый редукционный зубчатый механизм и червячную передачу, отличающееся тем, что сменные зажимные элементы закреплены штифтами на симметрично расположенных кольцевых зубчатых сегментах цилиндрического прямозубого редукционного механизма с внутренним зацеплением и кинематически связаны с промежуточным зубчатым колесом привода и с шестерней, сблокированной на одной оси с коническим редукционным механизмом в виде ведущего и ведомого конических зубчатых колес и червячным колесом, при этом червяк, вращающий колесо, одет на вал электродвигателя, закрепленного в корпусе захвата с байонетным разъемом и с проточками, в котором смонтированы упомянутые прижимные ролики.
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| Схват промышленного робота | 1986 |
|
SU1328193A1 |
| Двухместное захватное устройство | 1988 |
|
SU1516346A2 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2042503C1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |

