Изобретение относится к весоизмерительной технике и может использоваться в народном хозяйстве, в различных отраслях промышленности, в сельском хозяйстве и торговле, для которых характерно перемещение больших объемов грузов автомобилями.
Известен, принятый за прототип, способ взвешивания автомобилей на мультиплатформенных весах, обычно состоящих из трех платформ длиной 4,5+4,5+13,6 м в соответствии с расположением осей типового автопоезда. Это позволяет определить нагрузку от осей тягача, смежных осей прицепа и общий вес автопоезда (см. сайт фирмы Меттлер Толедо, http://www.mtrus.com/раздел Конструкция автомобильных весов).
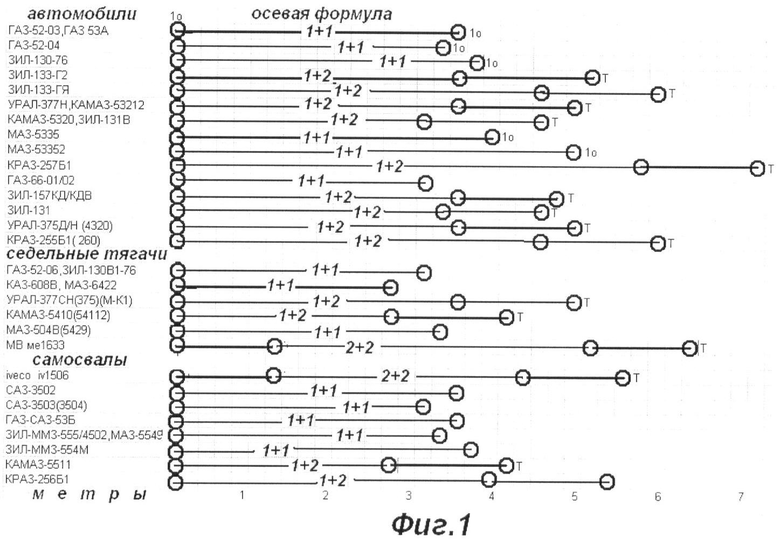
Прототип не свободен от недостатков, главным образом, для Потребителя. Это чрезмерно большие габариты, слишком большое количество (30-40) типоразмеров мультиплатформенных весов, понуждающее Потребителя при изменении условий бизнеса модернизировать весы или вообще заказывать новые. В то же время рассматривая практически все существующие типы автомобилей (фиг.1, кроме карьерных), прицепов и полуприцепов (фиг.2), можно сделать вывод о том, что они не так уж сильно различаются по размерам, осевым нагрузкам и осевым формулам.
Другим недостатком прототипа является то, что с его помощью нельзя определить по отдельности вес автомобиля и вес прицепа, что в ряде случаев необходимо.
Третьим недостатком прототипа является наличие только режима статического взвешивания, взвешивание в движении осуществляется на других моделях, где, в свою очередь, нет статического режима. Для современного интенсивного производства необходимо одновременное наличие обоих режимов.
Наконец, прототип не способен работать без весовщика в полностью автоматическом режиме, что серьезно тормозит его эксплуатацию при отсутствии весовщика в обеденные перерывы или по другим причинам.
Задачей, на решение которой направлено изобретение, является создание универсального способа взвешивания автомобилей, способного удовлетворить многие потребности Потребителя.
Технический результат достигается за счет того, что применение идентификации в составе платформенных весов позволяет однозначно определять одиночные оси и мосты автомобилей и управлять процессом взвешивания автоматически. На одних и тех же весах возможно статическое и динамическое взвешивание всех типов автомобилей.
Сущность технического решения заключается в том, что способ автоматического взвешивания автомобилей в статике и движении, включающий их перемещение по платформенным весам, измерение быстродействующим АЦП и запоминание кодов нагрузок, определение съездов и наездов осей, идентификацию прохождения осей и мостов, причем измерение веса начинают при фиксации одной из осевых формул автомобиля: 1+1; 1+2 или 2+2, а прекращают в статике по команде компьютера «конец измерения», формируемой по достижению заданного числа упомянутых кодов, при этом сигналы о начале и конце взвешивания в статике передают водителю с помощью светофора, а в движении - по первому съезду после начала измерения с платформенных тензовесов оси автомобиля или наезду первой оси прицепа или полуприцепа.
Измерение веса прицепа или полуприцепа начинают после выезда с платформенных тензовесов последней оси автомобиля и прекращают - в статике по команде компьютера «конец измерения», формируемой по достижении заданного числа кодов, а в движении - по съезду после начала измерения с платформенных тензовесов первой оси прицепа или полуприцепа.
Для идентификации осей и мостов выполняют платформу тензовесов со сдвигом левой и правой колеи, причем длина сдвига соответствует длине мостов взвешиваемых автомобилей.
Кроме того, для идентификации используют примыкающую к платформенным тензовесам дополнительную весовую платформу, длина которой соответствует длине мостов взвешиваемых автомобилей, или контактные, бесконтактные или оптические выключатели, отнесенные от платформенных тензовесов на расстояние, соответствующее длине мостов взвешиваемых автомобилей.
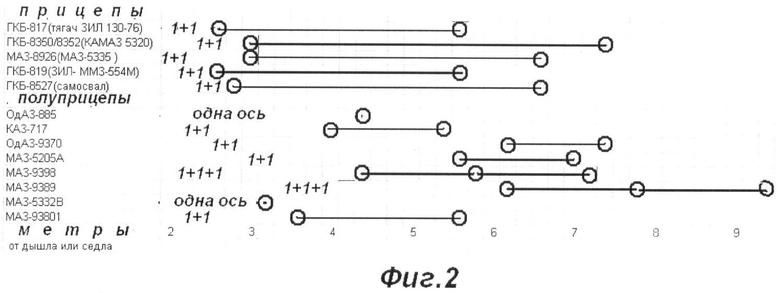
На фиг.1, 2 приведены осевые схемы и габаритные размеры практически всех используемых в России автомобилей, фиг.3, 4, 5 - варианты реализации предлагаемого способа, фиг.6 поясняет принцип действия способа.
Рассмотрим фиг.1, графически представляющую парк используемых в России автомобилей общего назначения, повышенной проходимости, седельных тягачей и самосвалов. На фиг.1 показаны базы автомобилей в метрах и осевые формулы, которых всего три: 1+1; 1+2 и 2+2. На фиг.2 изображены метрические размеры и осевые формулы прицепов и полуприцепов, причем видно, что минимальный просвет между последней осью автомобиля и первой осью прицепа - 2,6 метра, а у полуприцепов - еще больше, при этом размеры самих прицепов и полуприцепов не более 4,5 метра. Эти данные важны для понимания принципа действия способа.
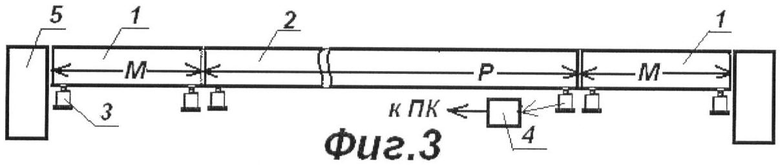
На фиг.3 представлен один из вариантов реализации предлагаемого способа - платформенные тензовесы, состоящие из блоков 1 идентификации и весовой платформы 2, причем блок 1 идентификации выполнен в виде дополнительной весовой платформы, опирающейся, как и весовая платформа 2, на тензодатчики 3 (например, типа WBK фирмы CAS), сигналы которых через преобразователи 4 аналог-код (например, типа ПД-003 фирмы Тензо-М) поданы на вход персонального компьютера ПК (на фиг.3 не показан). Длину М дополнительной весовой платформы выбирают больше длины мостов взвешиваемых автомобилей, которые обычно не более 1,6 метра. Смещение весов ограничено бетонным ограждением 5, установленным вровень с поверхностью дорожного полотна.
Поскольку реализация весов по фиг.3 требует большого количества (12 шт.) тензодатчиков 3, это может оказаться неприемлемым для некоторых Потребителей. На фиг.4 изображены реализующие способ весы, платформа 2 которых выполнена со сдвигом левой и правой колеи, причем длина сдвига соответствует длине мостов взвешиваемых автомобилей. Для удобства обслуживания тензодатчиков 3 (в количестве 4 шт) в бетонном ограждении 5 предусмотрены люки 6.
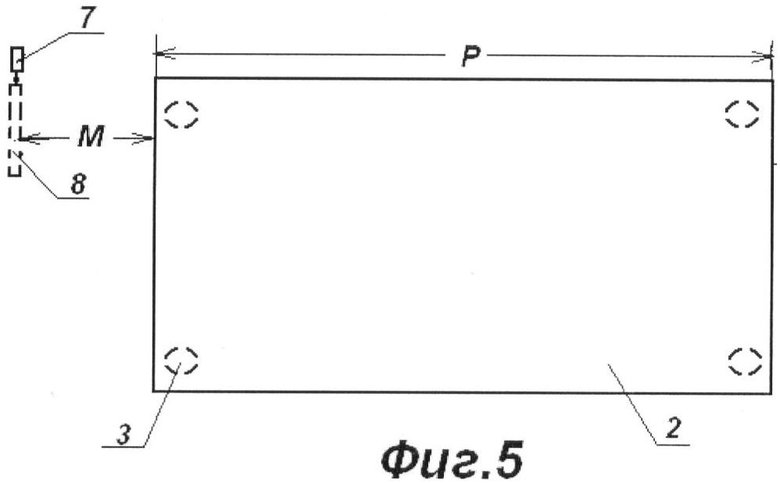
На фиг.5 изображены платформенные весы, идентификация автомобилей на которых выполняется контактным или бесконтактным выключателем 7, отстоящих от платформы 2 на расстоянии, соответствующем длине мостов взвешиваемых автомобилей и приводимых в действие педалью 8, по которой проезжают колеса автомобилей.
Весы по фиг.3, 4 и 5 при платформах 2 длиной Р от 8 до 9 метров способны взвешивать весь парк объектов, обозначенных на фиг.1, 2, но выгодно отличаются по габаритам и выполняемым функциям от известных и выпускаемых многими фирмами автомобильных весов, причем автомобили и седельные тягачи взвешиваются первыми, когда прицепы и полуприцепы находятся на ровном дорожном полотне, далее автомобили и седельные тягачи проезжают вперед на ровное дорожное полотно, а прицепы и полуприцепы наезжают на весы, где взвешиваются.
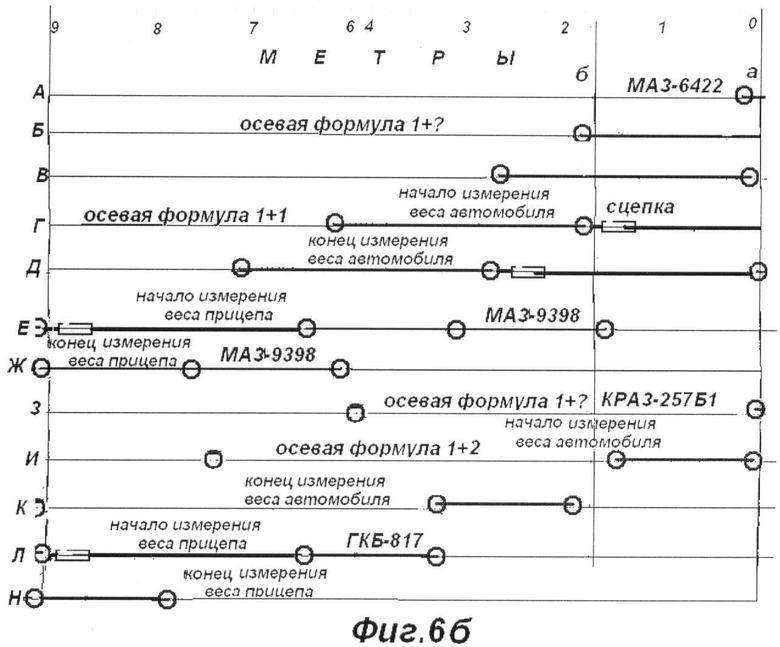
Работу способа для весов по фиг.3 поясним с помощью фиг.6. Пусть на платформенные весы по фиг.6а (такие же как весы по фиг.3) справа наезжает седельный тягач МА3-6422 (осевая формула 1+1) с трехосным полуприцепом МАЗ-9398. При наезде на блок 1 идентификации первой оси тягача МАЗ-6422 (позиция А фиг.6б) в персональном компьютере записывается «1» и формируется команда «Движение справа», а при выезде этой оси с блока 1 идентификации (позиция Б фиг.6б) в персональном компьютере фиксируется первая часть осевой формулы тягача МАЗ-6422 (1+?).
При наезде на блок 1 идентификации второй оси тягача МА3-6422 (позиция В фиг.6б) в персональном компьютере записывается вторая «1», но измерение веса тягача начинается только при выезде второй оси с блока 1 идентификации (позиция Г фиг.6б), когда в персональном компьютере фиксируется вся осевая формула тягача МАЗ-6422 (1+1). В момент времени, соответствующий позиции Г, на выезде весов автоматически включается красный светофор «СТОП» водителю, который при необходимости тормозит, и взвешивание производится в статике. В этом случае команду «Конец измерения» формирует персональный компьютер по набору заданного числа кодов (например, 1024) преобразователей 4. Результат измерения в этом случае может быть получен суммированием 1024 кодов с отбрасыванием трех последних десятичных цифр суммы.
Если взвешивание производят в движении, то окончание измерения производят по наезду на блок 1 идентификации оси прицепа, как это показано на позиции Д фиг.6б. При этом число кодов, принятых от преобразователей 4, может быть различным, и результат измерения вычисляется по известному алгоритму с применением приемов цифровой фильтрации.
Измерение массы трехосного прицепа начинается (позиция Е фиг.6б) после выезда с весов последней оси тягача, т.к. в этот момент прицеп (и любой прицеп или полуприцеп по фиг.2) полностью находится на весах. Все предыдущие рассуждения о взвешивании тягача можно повторить. Если взвешивание в движении, то процесс заканчивают согласно позиции Ж фиг.6б при съезде первой оси прицепа с весов.
Покажем, как работает способ при взвешивании самого длинного автомобиля по фиг.1 - КРАЗ-257Б1 с двухосным прицепом ГК-817. В этом случае осевая формула (1+2) определяется согласно позиции И фиг.6б, т.е. ранее, чем в предыдущем случае, и соответственно взвешивание можно начать тоже раньше. Конец измерения наступает по позиции К фиг.6б при выезде с весов первой оси автомобиля. Начало взвешивания прицепа ГК-817 (позиция Л фиг.6б) производят после выезда последней оси автомобиля, а заканчивают согласно позиции Н фиг.6б при съезде с весов первой оси прицепа.
Аналогично описанному выше взвешиваются все объекты, изображенные на фиг.1, 2, без каких-либо исключений.
Поясним кратко, как работает способ при реализации по фиг.4, когда идентификация осуществляется с помощью самой весовой платформы 2. При наезде автомобиля на платформу 2, например, слева (по фиг.4) по очереди нагружаются тензодатчики 3, сначала левый ЛВ, а затем правый ПР. Программа ПК обрабатывает сигналы тензодатчиков, фиксируя наезды. Принцип идентификации простой: если при наезде на правый тензодатчик наезда на левый нет, значит въезжает одиночная ось. Если при наезде на правый тензодатчик имеет место и наезд на левый, значит въезжает мост автомобиля. Измерение веса начинают при фиксации одной из осевых формул: 1+1; 1+2 или 2+2 (других осевых формул у автомобилей нет).
У весов по фиг.5 принцип идентификации сходный: если при наезде на крайние тензодатчики 3, педаль 8 не квитирована и выключатель 7 не сработал, значит въезжает одиночная ось. Если при наезде на крайние тензодатчики 3 выключатель 7 сработал, значит въезжает мост автомобиля.
Обращаем внимание, что весы, работающие по способу, не требуют присутствия весовщика. При наличии системы видеонаблюдения процесс документируется либо грузополучателем, либо грузоотправителем с занесением данных в базу данных предприятия, т.к. в настоящее время проверка содержимого груза проводится практически в 100% случаев.
Обращаем также внимание, что взвешивание в движении, не требующее какого-либо дополнительного оборудования производится, когда все оси автомобиля или прицепа находятся на весах. Главным источником ошибок при традиционном взвешивании в движении, когда часть осей объекта находится на весах, а часть на дорожном полотне, являются неровности полотна или колес (ошибки до 1% и выше). Поэтому, по нашей оценке, способ позволит получить погрешности, лишь незначительно большие, чем при взвешивании в статике.
В настоящее время производится проектирование весов согласно способу, разрабатываются программы. Первый экземпляр весов поступит к Заказчику ориентировочно во 2-ом квартале 2009 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЭЛЕМЕНТНОГО ВЗВЕШИВАНИЯ АВТОМОБИЛЕЙ | 2002 |
|
RU2239798C2 |
| СПОСОБ ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2390735C1 |
| СПОСОБ ПОЭЛЕМЕНТНОГО ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2002 |
|
RU2239799C2 |
| Весы для определения нагрузок на оси транспортного средства | 2020 |
|
RU2730375C1 |
| Способ потележечного взвешивания вагонов на ходу | 1982 |
|
SU1016688A1 |
| Устройство для поосного взвешивания автомобилей в движении | 1991 |
|
SU1809323A1 |
| Способ взвешивания подвижных объектов | 1986 |
|
SU1453179A1 |
| Устройство для взвешивания железнодорожного подвижного состава | 1984 |
|
SU1234728A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1983 |
|
SU1078256A1 |
| СПОСОБ ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2507486C1 |

Изобретение относится к весоизмерительной технике и может использоваться для взвешивания автомобилей и автопоездов в статике и движении. Способ включает перемещение автомобилей по платформенным весам, измерение быстродействующим АЦП и запоминание кодов нагрузок, определение съездов и наездов осей, при этом идентифицируют прохождение осей и мостов. Измерение веса автомобиля начинают при фиксации одной из осевых формул автомобиля: 1+1, 1+2 или 2+2, и прекращают в статике по команде компьютера «конец измерения», формируемой по достижению заданного числа упомянутых кодов. При этом сигналы о начале и конце взвешивания в статике передают водителю с помощью светофора, а в движении - по первому съезду после начала измерения с платформенных тензовесов оси автомобиля или наезду первой оси прицепа или полуприцепа. Технический результат заключается в возможности взвешивания различных автомобилей в статике и движении с близкими погрешностями в обоих случаях. 4 з.п. ф-лы, 7 ил.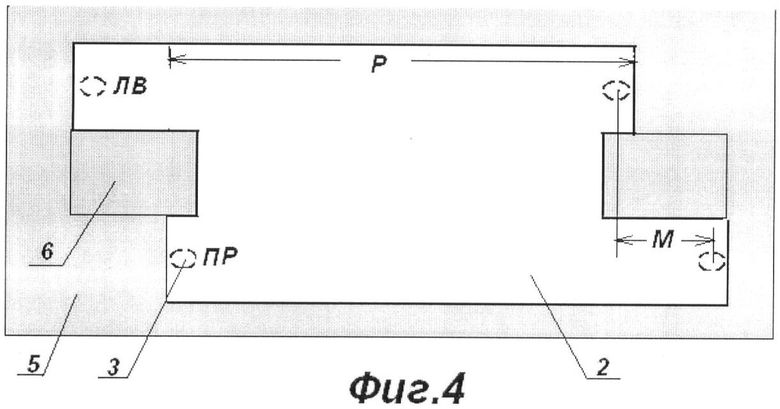
1. Способ автоматического взвешивания автомобилей в статике и движении, включающий их перемещение по платформенным весам, измерение быстродействующим АЦП и запоминание кодов нагрузок, определение съездов и наездов осей, отличающийся тем, что идентифицируют прохождение осей и мостов, измерение веса автомобиля начинают при фиксации одной из осевых формул автомобиля: 1+1, 1+2 или 2+2, прекращают в статике по команде компьютера «конец измерения», формируемой по достижению заданного числа упомянутых кодов, при этом сигналы о начале и конце взвешивания в статике передают водителю с помощью светофора, а в движении - по первому съезду после начала измерения с платформенных тензовесов оси автомобиля или наезду первой оси прицепа или полуприцепа.
2. Способ по п.1, отличающийся тем, что измерение веса прицепа или полуприцепа начинают после выезда с платформенных тензовесов последней оси автомобиля и прекращают в статике по команде компьютера «конец измерения», формируемой по достижению заданного числа кодов, а в движении - по съезду после начала измерения с платформенных тензовесов первой оси прицепа или полуприцепа.
3. Способ по п.1, отличающийся тем, что для идентификации осей и мостов выполняют платформу тензовесов со сдвигом левой и правой колеи, причем длина сдвига соответствует длине мостов взвешиваемых автомобилей.
4. Способ по п.1, отличающийся тем, что для идентификации осей и мостов используют примыкающую к платформенным тензовесам дополнительную весовую платформу, длина которой соответствует длине мостов взвешиваемых автомобилей.
5. Способ по п.1, отличающийся тем, что для идентификации осей и мостов используют контактные, бесконтактные или оптические выключатели, отнесенные от платформенных тензовесов на расстояние, соответствующее длине мостов взвешиваемых автомобилей.
| СПОСОБ ПОЭЛЕМЕНТНОГО ВЗВЕШИВАНИЯ АВТОМОБИЛЕЙ | 2002 |
|
RU2239798C2 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| RU 95101655 A1, 27.04.1996 | |||
| RU 94023629 A1, 27.01.1996. | |||

