Изобретение относится к авиационной технике, в частности к орнитоптерам, и может быть использовано в дельтапланерном спорте.
Известен дельтаплан, содержащий силовой каркас: консоли, поперечину, килевую трубу, рулевую трапецию, мачту, нижние и верхние растяжки и купол с латами (книга авторов Жеглова В.А., Рыбкина В.Б., Мацепуро О.В. "Учись летать на дельтаплане", изд. ДОСААФ, СССР, М., 1983, стр.87, рис.91).
Недостаток этого дельтаплана заключается в том, что он совершает недлительный полет и не способен поддерживать, а тем более набирать высоту полета без наличия динамических или термических потоков.
Известен дельтаплан с машущими крыльями по патенту США №5170965, МПК В 64 С 31/04, опубл.15.12.92 г. Аппарат содержит остов, выполненный в виде рамы, состоящей из взаимно перпендикулярных балок, связанных стяжками. На раме закреплены крылья, хвостовая часть оперения и шасси. Крыло включает подпружиненный к раме лонжерон, на котором закреплена обшивка, растянутая на массивных латах. В процессе полета пилот воздействует ногами на педали, соединенные гибкой тягой с лонжероном. Гибкая тяга через натяжные ролики соединена с рамой и обеспечивает машущие движения крыла, возврат которого осуществляется посредством соответствующей пружины. Конструкция дельтаплана с машущими крыльями очень громоздка.
Наиболее близким, выбранным за прототип, является летательный аппарат по патенту РФ №2138424, МПК В 64 С 33/02, приоритет 07.02.97 г., опубл.27.09.99 г., Бюл.№27), содержащий остов, шарнирно установленные на нем крылья, состоящие из лонжерона, лат и обшивки, пневмосистему. Лонжерон соединен с гибкой тягой, установленной на натяжных роликах, которые установлены по обе стороны от места соединения штока с гибкой тягой, крыло выполнено по форме треугольника, а латы выполнены из гибкого материала.
Недостатком этого летательного аппарата является сложность изготовления и наличие пневмосистемы, баллона со сжатым воздухом, ограничивающим время полета и требующим компрессорного оборудования и увеличивающим вес летательного аппарата.
В основу изобретения поставлена задача упрощения конструкции, снижения ее веса, а также выполнение минимальных затрат на переоборудование обычного дельтаплана в летательный аппарат с машущими крыльями, обеспечивая ему возможность совершать более длительный полет, а при необходимости и набора высоты, не прикладывая больших усилий.
Поставленная задача достигается тем, что дельтамахолет содержит остов с шарнирно установленными крыльями, включающими лонжерон, нежесткую обшивку и латы, рулевую трапецию с мачтой, гибкую тягу с натяжными роликами, подвесную систему пилота, приводной элемент, стабилизатор. Аппарат снабжен рычагом с самозахватывающими роликами, шарнирно закрепленным одним концом на остове, а другим - с верхней гибкой тягой с мачтой через натяжные ролики на остове и крыльях и нижней гибкой тягой, соединяющей крылья через натяжные ролики на рулевой трапеции. Дельтамахолет включает в себя амортизационные элементы, закрепленные между крыльями и натянутые вдоль лонжерона, расположенные под углом к рычагу. Лонжерон закреплен ниже остова в верхней части рулевой трапеции и соединен с мачтой посредством трубчатых тяг с шарнирами и направляющей скользящей втулкой на мачте, которая, в свою очередь, усилена распорными трубками с рулевой трапецией. Функцию приводного элемента выполняет гибкая тяга самой подвесной системы пилота, связанная через ролик с мачтой и выполненная с утолщением с возможностью ее заклинивания в самозахватывающих оликах, снабженных разжимающим рычажком, связанным с гибким шнуром, который закреплен в нижней части рулевой трапеции в зоне досягаемости руки пилота.
Изобретение поясняется чертежами, где:
на фиг.1 изображен внешний вид дельтамахолета в аксонометрии;
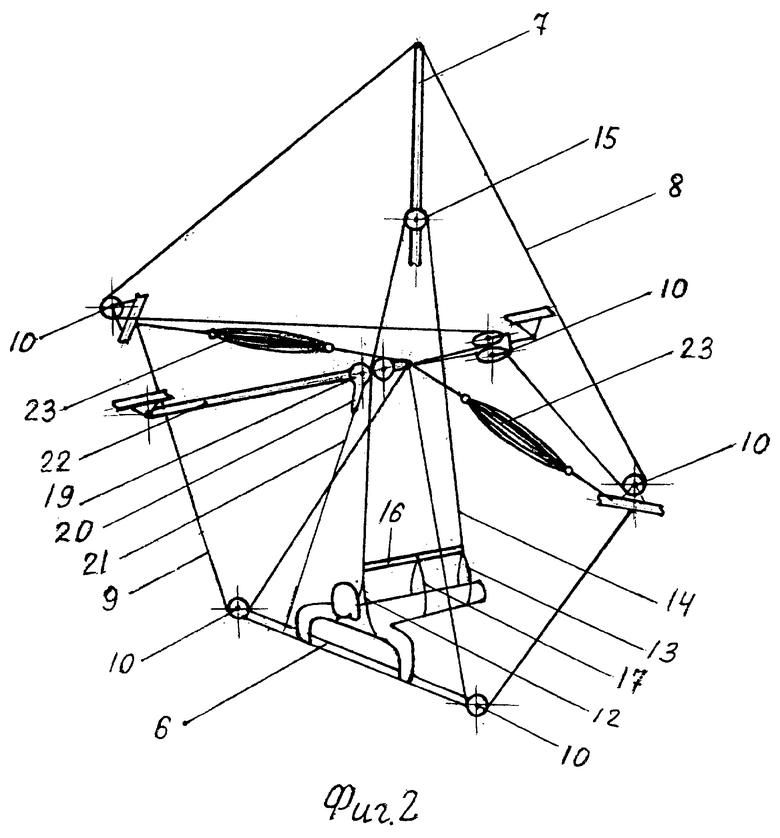
на фиг.2 - кинематическая схема дельтамахолета;
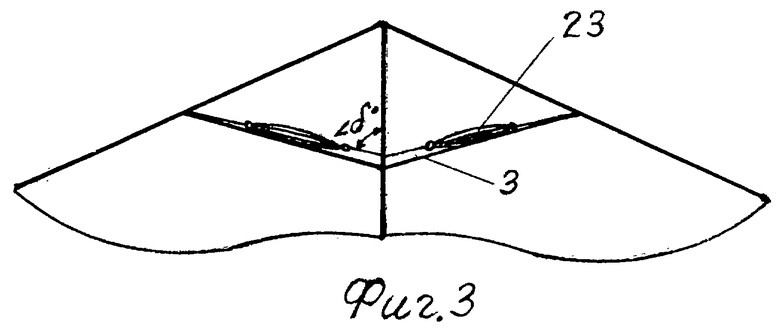
на фиг.3 - схема установки амортизационных элементов в плане;
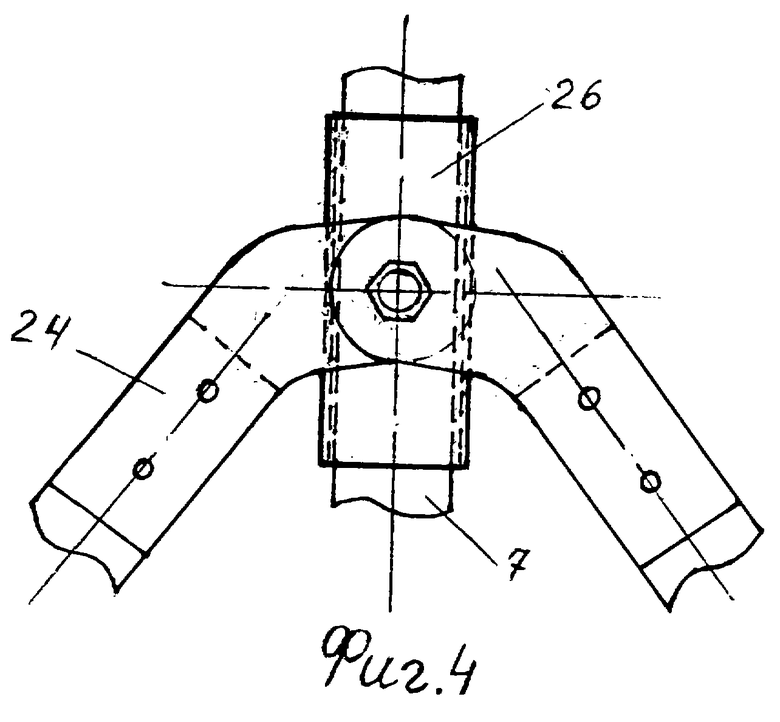
на фиг.4 - узел направляющей скользящей втулки на мачте;
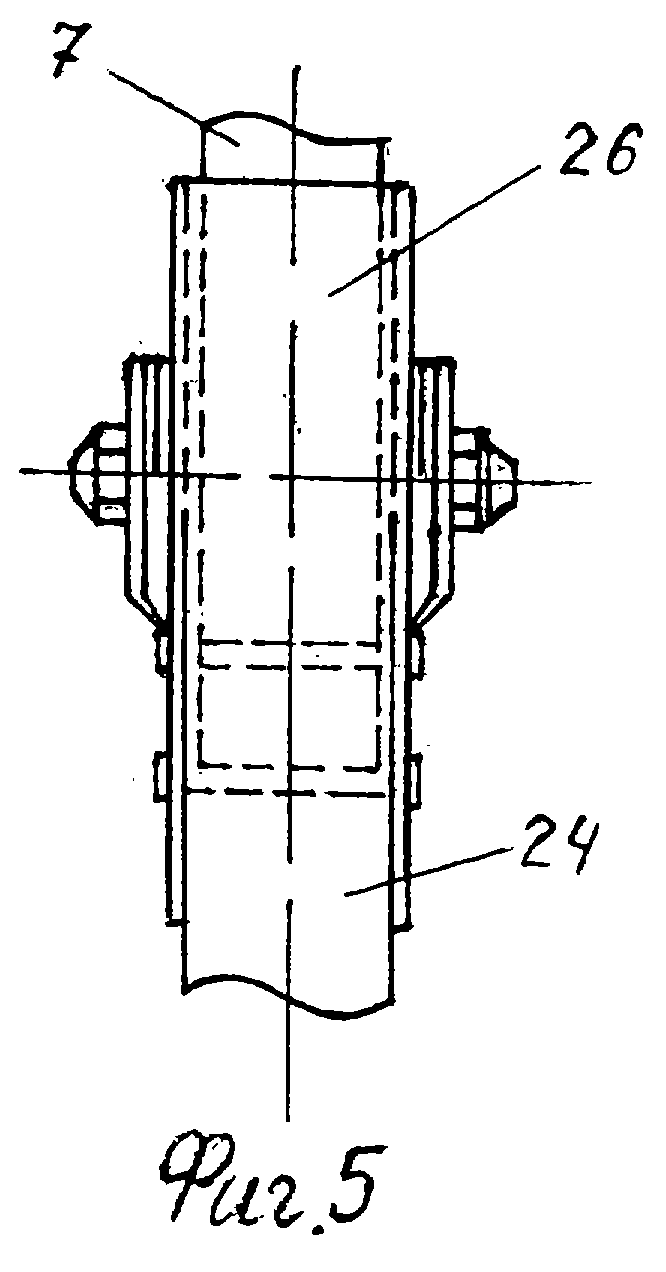
на фиг.5 - вид сбоку на узел направляющей скользящей втулки на мачте;
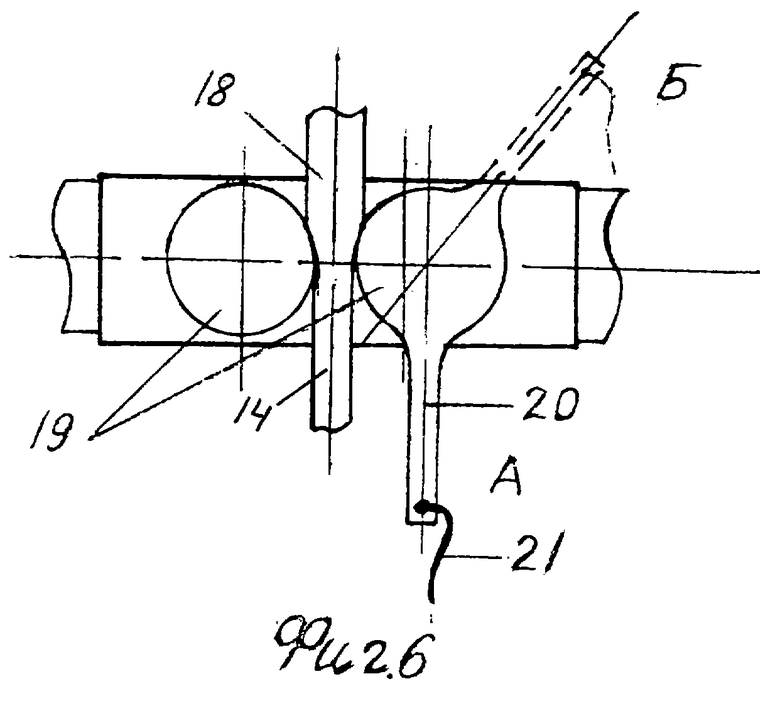
на фиг.6 - узел роликового самозахвата.
Дельтамахолет включает в себя остов 1, на котором шарнирно закреплены крылья 2, содержащие лонжерон 3, нежесткую обшивку 4 и латы 5, рулевую трапецию 6 с мачтой 7, верхнюю 8 и нижнюю 9 гибкие тяги с натяжными роликами 10, подвесную систему пилота 11, состоящую из плечевых 12 и ножных 13 лямок, соединенных гибкой тягой 14 через ролик 15 на мачте 7, и растянутой распорной трубкой 16, поддерживающей торс пилота лямкой 17. Гибкая тяга 14 выполнена с утолщением 18 с возможностью ее заклинивания в самозахватывающих роликах 19, снабженных разжимающим рычажком 20, связанным с гибким шнуром 21, закрепленным в нижней части рулевой трапеции 6 в зоне досягаемости руки пилота. Аппарат снабжен рычагом 22, шарнирно закрепленным одним концом на остове 1, а другим - с верхней гибкой тягой 8 с мачтой 7 через натяжные ролики 10 на остове 1 и крыльях 2 и нижней гибкой тягой 9, соединяющей крылья 2 через натяжные ролики 10 на рулевой трапеции 6. Между крыльями 2 закреплены амортизационные элементы 23, выполненные, например, в виде резиновых шнуров или пружин, и натянутые вдоль лонжерона 3, который для удержания крыльев 2 в горизонтальном положении (на земле) крепится ниже остова 1 в верхней части рулевой трапеции 6, и расположенные под углом к рычагу 22, при этом лонжерон 3 соединен с мачтой 7 посредством трубчатых тяг 24 с шарнирами 25 и направляющей скользящей втулкой 26 на мачте 7, которая, в свою очередь, усилена распорными трубками 27 с рулевой трапецией 6. На конце остова 1 установлен стабилизатор 28 для увеличения демпфирующего момента и увеличения устойчивости аппарата.
Принцип действия дельтамахолета.
В полете пилот, висящий в подвесной системе 11 на плечевых 12 и ножных 13 лямках, соединенных гибкой тягой 14, растянутой распорной трубкой 16, поддерживающей торс пилота лямкой 17 и дающей возможность эффективно использовать свой вес, перекатываясь на ролике 15, притягивая к себе рулевую трапецию 6, усилием рук и собственным весом, создает момент усилия для перемещения растянутых между крыльями 2, амортизационных элементов 23 и вывода их из состояния равновесия, а значит, соответственно, и крыльев 2, посредством перемещения рычага 22, укрепленного на остове 1, вверх или вниз гибким шнуром 21, заклинивающим, проходя через самозахватывающие ролики 19 (фиг.6) на рычаге 22, утолщением на гибкой тяге 14, благодаря эксцентрично посаженному ролику 19 с рычажком 20, который поворачивается, переходя из положения А в положение Б (фиг.6). Используя необходимый угол δ установки амортизационных элементов 23 к рычагу 22 в плане (фиг.3), увеличивая продольную нагрузку и, таким образом, образуя неустойчивое равновесие системы рычаг - амортизационный элемент - крыло. А также обратный момент на рычаге 22, образующийся в результате ограничения его свободного хода гибкими тягами 8 и 9, закрепленными на его конце.
Верхними гибкими тягами 8, идущими через натяжные ролики 10, на остове 1 и крыльях 2, на мачту 7, ограничивающие свободный ход крыльев 2 вверх. Нижние гибкие тяги 9 через натяжные ролики 10 на рулевой трапеции 6 к крыльям 2 соответственно вниз. Подвязанная задняя кромка концов крыльев 2 со свободным ходом способствует увеличению обратного момента. Синхронизируют движения крыльев 2 тяги 24 (фиг.1) с шарнирами 25 на лонжероне 3 и направляющей скользящей втулкой 26 на мачте 7 (фиг.4 и 5). Рулевая трапеция 6 и мачта 7 усилены распорными трубками 27.
Таким образом, пилот легко перемещает рычаг 22, притягивая к себе рулевую трапецию 6, делая мах вниз, а вверх - наоборот, отжимая от себя вниз и вперед, весом тела создавая обратный момент на рычаге 22.
Чтобы перейти в посадочное положение, надо отжать рычажок 20, переведя его в исходное положение А (фиг.6) гибким шнуром 21.
Таким образом, совокупность признаков, характеризующих конструкцию дельтамахолета (фиг.1), его кинематику (фиг.2), амортизационные элементы 23, позволяет решить поставленную задачу: не прикладывая больших усилий, управлять и делать махи крыльями, максимально упрощает конструкцию, не используя двигателя, пневмо- или гидросистему, что создает громоздкий вес.
В настоящее время изготовлен опытный образец, он проходит летные испытания. По приведенным чертежам и кинематической схеме можно изготавливать дельтамахолеты. Летательные аппараты можно использовать при активном отдыхе в горах, на море туристами или спортсменами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1997 |
|
RU2138424C1 |
| БИОАЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 2009 |
|
RU2392189C1 |
| Дельтаплан | 1980 |
|
SU973410A1 |
| Дельтаплан с балансирным управлением | 1984 |
|
SU1200530A1 |
| ОРНИТОПТЕР | 2002 |
|
RU2270136C2 |
| Дельтаплан | 1987 |
|
SU1752657A1 |
| Орнитоптер | 2023 |
|
RU2810824C1 |
| Махолет | 2017 |
|
RU2655582C1 |
| МОТОДЕЛЬТАПЛАН | 1998 |
|
RU2188144C2 |
| Дельтаплан @ -07 | 1982 |
|
SU1098866A1 |
Изобретение относится к авиационной технике. Дельтамахолет содержит остов с шарнирно установленными крыльями, включающими лонжерон, нежесткую обшивку и латы, рулевую трапецию с мачтой, гибкую тягу с натяжными роликами, подвесную систему пилота, приводной элемент, стабилизатор. Дельтамахолет снабжен рычагом с самозахватывающими роликами, шарнирно закрепленным одним концом на остове, а другим - с верхней гибкой тягой с мачтой через натяжные ролики на остове и крыльях и нижней гибкой тягой, соединяющей крылья через натяжные ролики на рулевой трапеции. Кроме того, дельтамахолет включает в себя амортизационные элементы, закрепленные между крыльями и натянутые вдоль лонжерона. Лонжерон для удержания крыльев в горизонтальном положении на земле закреплен ниже остова в верхней части рулевой трапеции и соединен с мачтой посредством трубчатых тяг с шарнирами и направляющей скользящей втулкой на мачте. Гибкая тяга подвесной системы пилота связана с мачтой с возможностью заклинивания в самозахватывающих роликах, снабженных разжимающимся рычажком, связанным с гибким шнуром, закрепленным в нижней части рулевой трапеции в зоне досягаемости руки пилота. Технический результат - упрощение конструкции и снижение веса. 6 ил.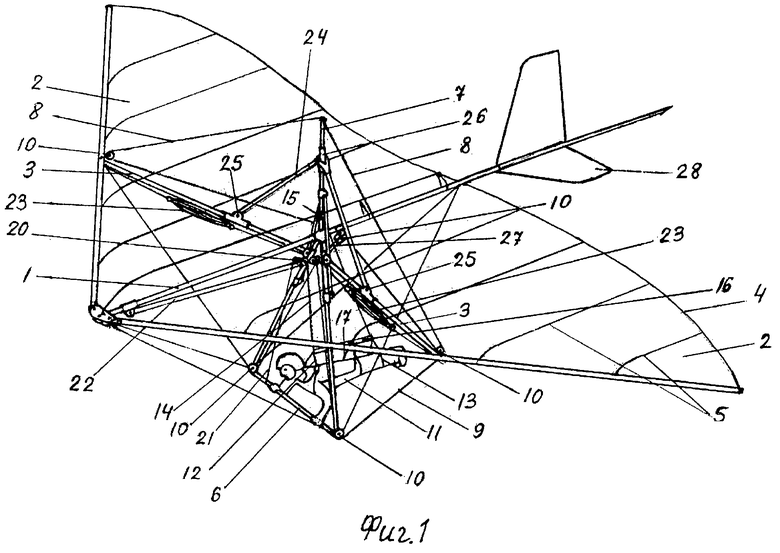
Дельтамахолет, содержащий остов с шарнирно установленными крыльями, включающими лонжерон, нежесткую обшивку и латы, рулевую трапецию с мачтой, гибкую тягу с натяжными роликами, подвесную систему пилота, приводной элемент, стабилизатор, отличающийся тем, что он снабжен рычагом с самозахватывающими роликами, шарнирно закрепленным одним концом на остове, а другим - с верхней гибкой тягой с мачтой через натяжные ролики на остове и крыльях и нижней гибкой тягой, соединяющей крылья через натяжные ролики на рулевой трапеции, при этом он включает в себя амортизационные элементы, закрепленные между крыльями и натянутые вдоль лонжерона, закрепленного для удержания крыльев в горизонтальном положении на земле ниже остова в верхней части рулевой трапеции, расположенные под углом к рычагу, при этом лонжерон закреплен ниже остова в верхней части рулевой трапеции и соединен с мачтой посредством трубчатых тяг с шарнирами и направляющей скользящей втулкой на мачте, которая, в свою очередь, усилена распорными трубками с рулевой трапецией, при этом функцию приводного элемента выполняет гибкая тяга подвесной системы пилота, связанная через ролик с мачтой и выполненная с утолщением и с возможностью ее заклинивания в самозахватывающих роликах, снабженных разжимающим рычажком, связанным с гибким шнуром, закрепленным в нижней части рулевой трапеции в зоне досягаемости руки пилота.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1997 |
|
RU2138424C1 |

