Изобретение относится к области автоматического управления и регулирования различными объектами. Оно может быть использовано в механике, в стандартных регуляторах и системах автоматического управления.
Известен способ управления динамическим объектом, который включает сравнение вектора состояний объекта управления с вектором требуемых целевых значений. На основе полученных результатов посредством взятия нелинейной функции формируют промежуточный сигнал управления, который впоследствии оптимизируют и уточняют для обеспечения необходимых системе управления свойств [патент РФ № 2302028].
Недостатком способа является невозможность адаптации построенной системы управления к различным возмущениям объекта. Нельзя утверждать, что объект управления остается неизменным в процессе функционирования, а это является серьезным фактором, влияющим на такие показатели качества управления, как точность и скорость стабилизации управляемого параметра.
Известен способ адаптивного управления динамическими системами и процессами, включающий определение собственных характеристик управляемого объекта в процессе функционирования и последующее управление. В указываемом способе предлагается производить предварительное управление объектом с целью подстройки системы управления для достижения наилучшего результата [Патент US №4479176].
Недостатком данного способа является необходимость произведения значительных временных затрат на настройку системы управления. Если функционирование объекта происходит в быстро меняющихся условиях, то подобная система может оказаться неэффективной для обеспечения заранее заданных показателей качества управления.
Наиболее близким, выбранным за прототип, является способ управления объектом с параметрической адаптацией [патент РФ № 2054193]. Для управления механическим колебательным объектом создают управляющий момент: Mу=Kуν+K2
 , где (ν отклонение объекта - выходной сигнал объекта, a
, где (ν отклонение объекта - выходной сигнал объекта, a  - производная отклонения - производная выходного сигнала, K1 и K2 - коэффициенты управления по отклонению и по производной соответственно. Вычисляют частоту стабилизационных колебаний системы с построенным управляющим моментом, согласно полученной частоте стабилизационных колебаний настраивают коэффициенты управления. Во второй раз измеряют частоту стабилизационных колебаний и снова настраивают коэффициенты управления. Дополнительно модулируют коэффициент управления по отклонению объекта. Модуляцию производят на удвоенной частоте стабилизационных колебаний, при этом глубина модуляции h0 определяется выражением:
- производная отклонения - производная выходного сигнала, K1 и K2 - коэффициенты управления по отклонению и по производной соответственно. Вычисляют частоту стабилизационных колебаний системы с построенным управляющим моментом, согласно полученной частоте стабилизационных колебаний настраивают коэффициенты управления. Во второй раз измеряют частоту стабилизационных колебаний и снова настраивают коэффициенты управления. Дополнительно модулируют коэффициент управления по отклонению объекта. Модуляцию производят на удвоенной частоте стабилизационных колебаний, при этом глубина модуляции h0 определяется выражением:
 .
.
Недостатком способа управления является необходимость многократного измерения частоты стабилизационных колебаний и связанных с ней характеристик регулятора. Это увеличивает время настройки, что делает невозможной оперативную подстройку регулятора под изменяющийся объект. Другим недостатком прототипа является отсутствие фиксации фазы колебаний объекта, а это в ряде случаев означает невозможность формирования оптимального закона управления.
Задачей изобретения является повышение качества работы регулятора, а именно увеличение скорости настройки регулятора, уменьшение среднего значения ошибки выходного сигнала колебательного объекта за все время стабилизационного процесса.
Предложен способ стабилизации выходного сигнала колебательного объекта. Он включает построение пропорционально-дифференциальной отрицательной обратной связи по выходному сигналу, модуляцию пропорционального коэффициента управления в обратной связи. Выходной сигнал фильтруют и выделяют гармонические составляющие, после чего удваивают их по частоте и стабилизируют по амплитуде А. Максимальную амплитуду этих гармонических составляющих устанавливают равной глубине модуляции h0 пропорционального коэффициента управления обратной связи, глубину модуляции h0 выбирают из условия:

Каждую из гармонических составляющих задерживают на время Т, где:
 ,
,
ω - частота главной гармонической составляющей, arg(W(jω)) - фазочастотная характеристика колебательного объекта на частоте ω, после чего результирующий сигнал подают на управляющий вход модулятора коэффициента управления.
Предлагаемый способ отличается тем, что модулирующий сигнал устанавливают не косвенно, как по прототипу, а формируют непосредственно из выходного сигнала, который необходимо стабилизировать. Частота выходного сигнала уже сама по себе определяет частоту модулирующего сигнала. Прежде всего необходимо выделить гармонические составляющие выходного сигнала. Это позволит формировать модулирующий сигнал непосредственно из выходного сигнала, а не косвенным путем измерения частоты и установкой требуемого модулирующего сигнала на модуляторе. Для получения возможности гашения колебаний выходного сигнала с использованием модуляции пропорционального коэффициента управления в обратной связи необходимо производить модуляцию на удвоенной частоте колебаний выходного сигнала, для этого их удваивают. Стабилизация амплитуд гармонических составляющих необходима, так как со временем они затухают, а управление объектом должно поддерживаться на постоянном уровне. Стабилизируя амплитуды гармонических составляющих на значении глубины модуляции, выбранном из предлагаемого условия, добиваемся постоянства амплитуды модулирующего сигнала. Гармонические составляющие необходимо задерживать на время Т, это позволяет минимизировать время гашения колебаний главной гармоники выходного сигнала. Именно главная гармоника выходного сигнала в наибольшей степени определяет среднюю ошибку выходного сигнала. Модулирующий сигнал, сформированный из выходного сигнала колебательного объекта, подают непосредственно на управляющий вход модулятора пропорционального коэффициента управления. Это дает возможность исключить измерение частоты колебаний выходного сигнала, обеспечивает постоянство запаздывания модулирующего сигнала относительно выходного. Все отличительные признаки являются существенными и необходимыми для решения задачи.
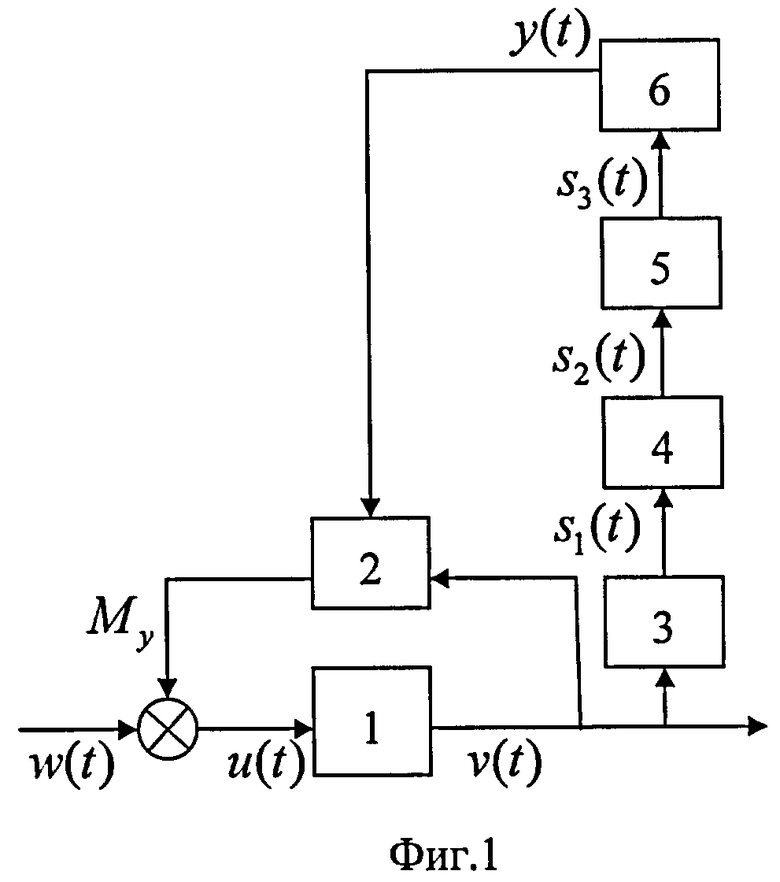
Предлагаемый способ стабилизации был реализован на экспериментальном стенде - фиг.1. Стенд содержит: колебательный объект - 1, регулятор, реализующий пропорционально дифференциальную обратную связь, содержащий в себе модулятор пропорционального коэффициента управления - 2, блок фильтра высокой частоты - 3, блок устройства удвоителя частоты - 4, блок устройства стабилизации амплитуды сигнала - 5, реализуемый, например, устройством усилителя-ограничителя, блок устройства задержки - 6.
На предлагаемой схеме приняты следующие обозначения сигналов:
Mу - управляющий сигнал, формируемый регулятором 2, на основе выходного сигнала и модулирующего сигнала;
w(t) - постоянный входной сигнал, несущий значение, требуемое на выходе колебательного объекта;
u(t) - сигнал, подаваемый на вход колебательного объекта;
ν(t) - выходной сигнал колебательного объекта.
Для стабилизации был выбран колебательный объект со следующей передаточной функцией:
 .
.
Частота стабилизационных колебаний такого объекта:
ω=0.16 Гц.
Фазовая характеристика такого колебательного объекта на частоте стабилизационных колебаний равна:
arg(W(jω))=90 град.
На вход колебательного объекта подается постоянный сигнал, равный:
w(t)=2.
На фиг.2 (толстая линия) представлен график колебаний выходного сигнала у экспериментального объекта без регулятора.
После этого была построена отрицательная обратная связь, реализующая пропорционально-дифференциальный закон управления. При этом коэффициент управления по отклонению выходного сигнала был установлен равным 1, а коэффициент управления по скорости изменения отклонения выходного сигнала был установлен равным 0.05. Была обеспечена возможность модуляции коэффициента управления в обратной связи.
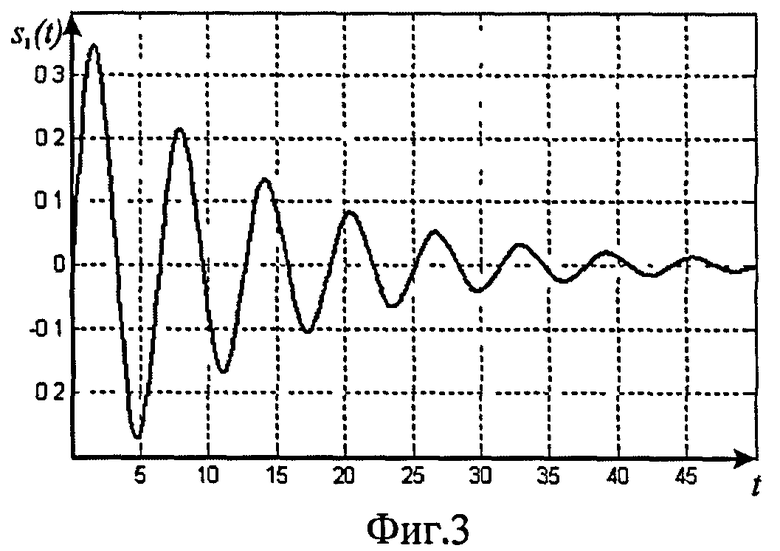
Для того чтобы сформировать модулирующий сигнал для модулятора, выходной сигнал ν(t) сначала пропускают через фильтр высокой частоты 3. Таким образом, выделяют гармонические составляющие выходного сигнала, в том числе его главную гармоническую составляющую. Сигнал s1(t) состоящий из полученных гармонических составляющих, представлен на фиг.3.
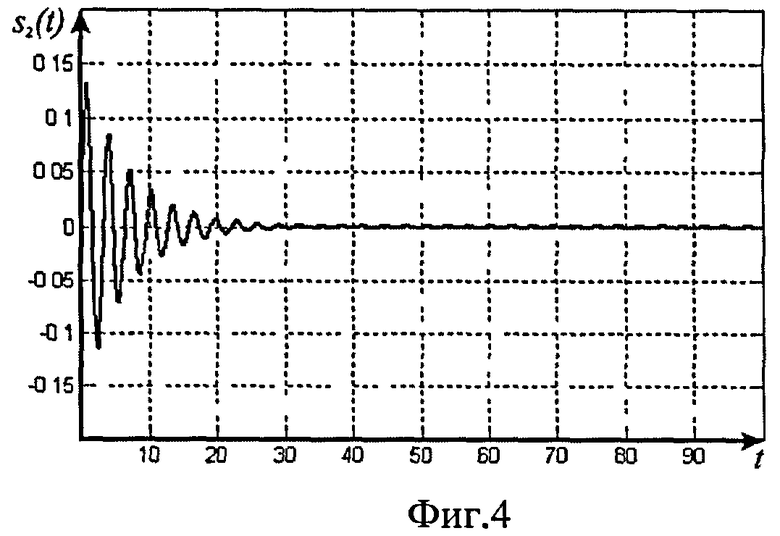
Для удвоения частоты каждой гармонической составляющей их пропускают через удвоитель частот 4 и формируют тем самым сигнал s2(t). На фиг.4 представлен график этого сигнала. В полученных сигналах s1(t) и s2(t) каждой гармонической составляющей сигнала s1(t), соответствует гармоническая составляющая сигнала s2(t). Для стабилизации амплитуды гармонических составляющих сигнала s2(t) их пропускают через усилитель-ограничитель 5, установив максимальную амплитуду каждой гармонической составляющей равной глубине модуляции h0, выбранной из условия:
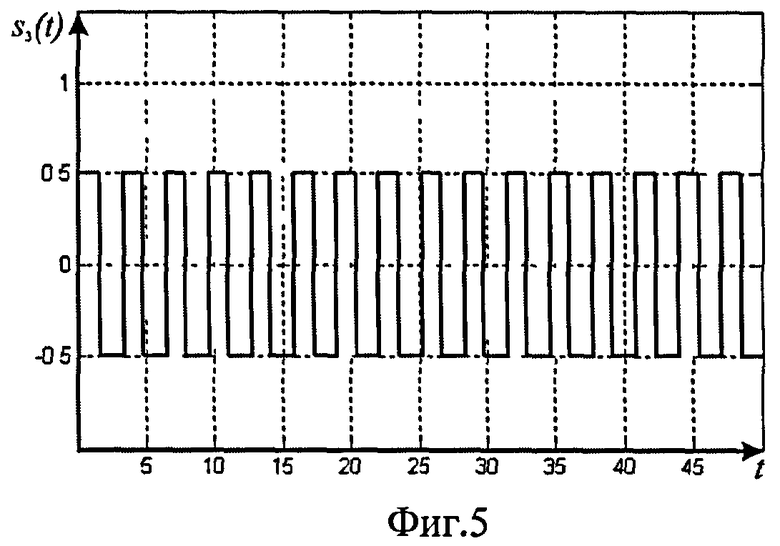
В рассматриваемом примере глубина модуляции равна 2,1, что соответствует неравенству. Ограничив тем самым максимальные амплитуды гармонических составляющих сигнала s2(t), получают сигнал s3(t). График полученного сигнала представлен на фиг.5. Каждую из гармонических составляющих сигнала s3(t) задерживают на время запаздывания Т, пропустив их через устройство задержки 6. В рассматриваемом эксперименте время запаздывания было вычислено согласно формуле:
,
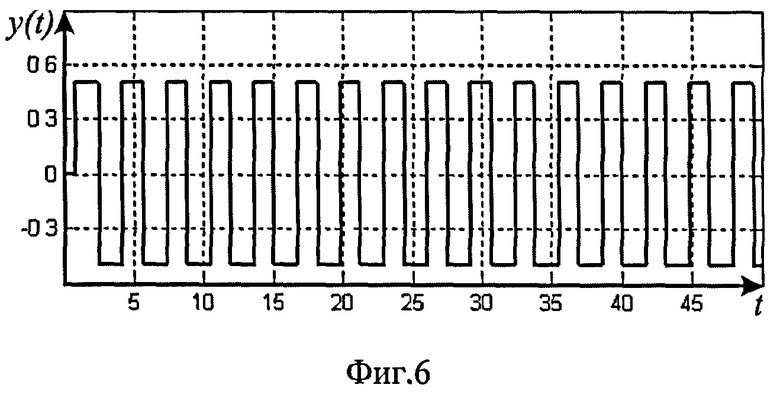
и установлено как 1,1 секунды. Проведя такой ряд преобразований над гармоническими составляющими выходного сигнала колебательного объекта, получают модулирующий сигнал y(t). График модулирующего сигнала, полученного в результате эксперимента, представлен на фиг.6. Посылая его на управляющий вход модулятора пропорционального коэффициента управления, получают стабилизированный сигнал колебательного объекта изображенный на фиг.2. (тонкая линия). Для наглядности все полученные сигналы совмещены в одном масштабе времени на фиг.7. Как видно на фиг.2, колебания стабилизированного сигнала затухают значительно быстрее, чем колебания выходного сигнала без управления.
Было произведено сравнение выходных сигналов колебательного объекта с регулятором, построенным по прототипу, и регулятором, построенным по предлагаемому изобретению. Для сравнения выходных сигналов регуляторов, построенных по двум исследуемым способам, был выбран показатель среднего значения ошибки выходного сигнала за все время стабилизационного процесса, который вычисляется по формуле:
 ,
,
где ν(t) - оцениваемый выходной сигнал, Т5 - время стабилизации, после которого отклонение выходного сигнала будет гарантированно меньше пяти процентов от заданного значения.
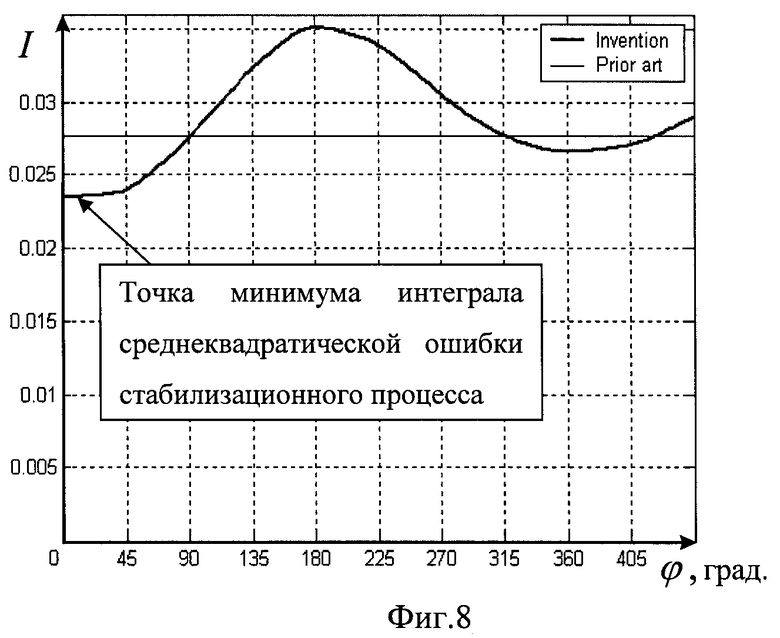
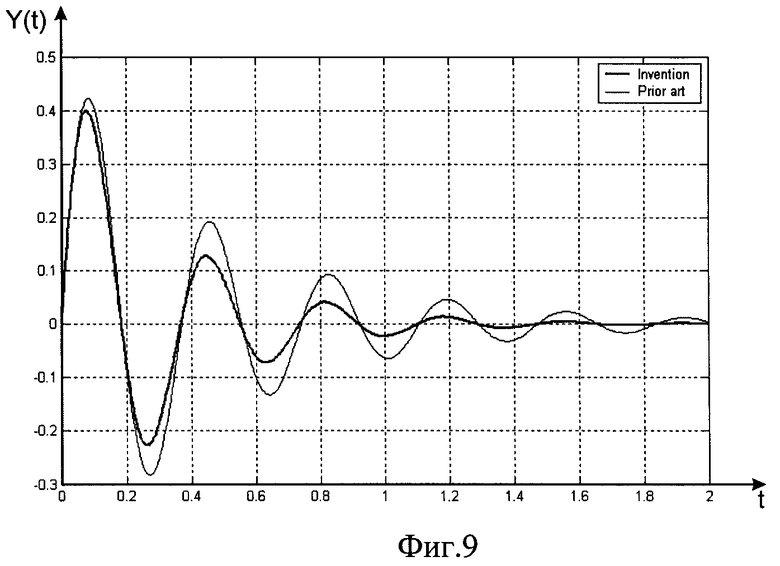
На фиг.8 представлено наложение зависимостей выбранного показателя от фазы смещения модулирующего сигнала. Широкой линией изображена зависимость среднего значения ошибки выходного сигнала колебательного объекта с регулятором по прототипу. Тонкой линией изображена зависимость среднего значения ошибки выходного сигнала колебательного объекта с регулятором по предлагаемому изобретению. Очевидно, что так как способ прототипа не включает управление по фазе, то среднее значение ошибки выходного сигнала остается неизменным при всех значениях фазы смещения. В то же время из графика видно, что использование предлагаемого способа и установка оптимального значения фазы смещения равным 10 град позволяют уменьшить среднее значение ошибки выходного сигнала на 17% от значения, получаемого при использовании способа прототипа, это означает возможность быстрее стабилизировать колебательный объект. На фиг.9 представлены графики стабилизационных процессов, тонкой линией изображен график стабилизационного процесса объекта с регулятором по прототипу, а утолщенной линией представлен график объекта с регулятором по предлагаемому изобретению. Как видно, колебания, возникающие при стабилизационном процессе объекта с регулятором по прототипу, затухают быстрее.
Пример демонстрирует, что способ позволяет увеличить скорость настройки регулятора, уменьшить среднее значение ошибки выходного сигнала за все время стабилизационного процесса и тем самым повысить качество работы регулятора и, следовательно, эффективность применения таких регуляторов в производстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2343524C1 |
| СПОСОБ УПРАВЛЕНИЯ ОБЪЕКТОМ С ПАРАМЕТРИЧЕСКОЙ АДАПТАЦИЕЙ | 1992 |
|
RU2054193C1 |
| РЕГУЛИРУЮЩИЙ МОДУЛЬ И УСТРОЙСТВО ДЛЯ ВОЗВРАТА В ИСХОДНОЕ СОСТОЯНИЕ ОСЦИЛЛЯТОРА, ВОЗБУЖДАЕМОГО ГАРМОНИЧЕСКИМ КОЛЕБАНИЕМ, А ТАКЖЕ ДАТЧИК МГНОВЕННОЙ УГЛОВОЙ СКОРОСТИ | 2011 |
|
RU2565516C2 |
| УПРАВЛЯЕМЫЙ ГЕНЕРАТОР | 2012 |
|
RU2506692C1 |
| Многоканальный имитатор канала магнитной записи | 1990 |
|
SU1767529A1 |
| АВТОДИННЫЙ ФОТОДЕТЕКТОРНЫЙ ПРИЕМОПЕРЕДАТЧИК ДЛЯ СИСТЕМ БЛИЖНЕЙ РАДИОЛОКАЦИИ | 2023 |
|
RU2824039C1 |
| ВЕКТОРНЫЙ СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ПРИ НЕСИММЕТРИЧНОЙ НАГРУЗКЕ | 2010 |
|
RU2444833C1 |
| СПОСОБ ЧАСТОТНОЙ МОДУЛЯЦИИ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2595638C1 |
| СПОСОБ ПОВЫШЕНИЯ КАЧЕСТВА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2011 |
|
RU2475914C1 |

Изобретение относится к области автоматического управления и регулирования различными объектами. Технический результат заключается в повышении качества работы регулятора, в увеличении скорости настройки регулятора, уменьшении среднего значения ошибки выходного сигнала колебательного объекта за все время стабилизационного процесса. Способ включает построение пропорционально-дифференциальной отрицательной обратной связи по выходному сигналу, модуляцию пропорционального коэффициента управления в обратной связи модуляции h0. Выходной сигнал фильтруют и выделяют гармонические составляющие, после чего удваивают их по частоте и стабилизируют по амплитуде А. Максимальную амплитуду этих гармонических составляющих устанавливают равной глубине модуляции h0 пропорционального коэффициента управления обратной связи, глубину модуляции h0 выбирают из условия:  . Каждую из гармонических составляющих задерживают на время Т, где:
. Каждую из гармонических составляющих задерживают на время Т, где:  , ω - частота главной гармонической составляющей, arg(W(jω)) - фазочастотная характеристика колебательного объекта на частоте ω, после чего результирующий сигнал подают на управляющий вход модулятора коэффициента управления. 9 ил.
, ω - частота главной гармонической составляющей, arg(W(jω)) - фазочастотная характеристика колебательного объекта на частоте ω, после чего результирующий сигнал подают на управляющий вход модулятора коэффициента управления. 9 ил.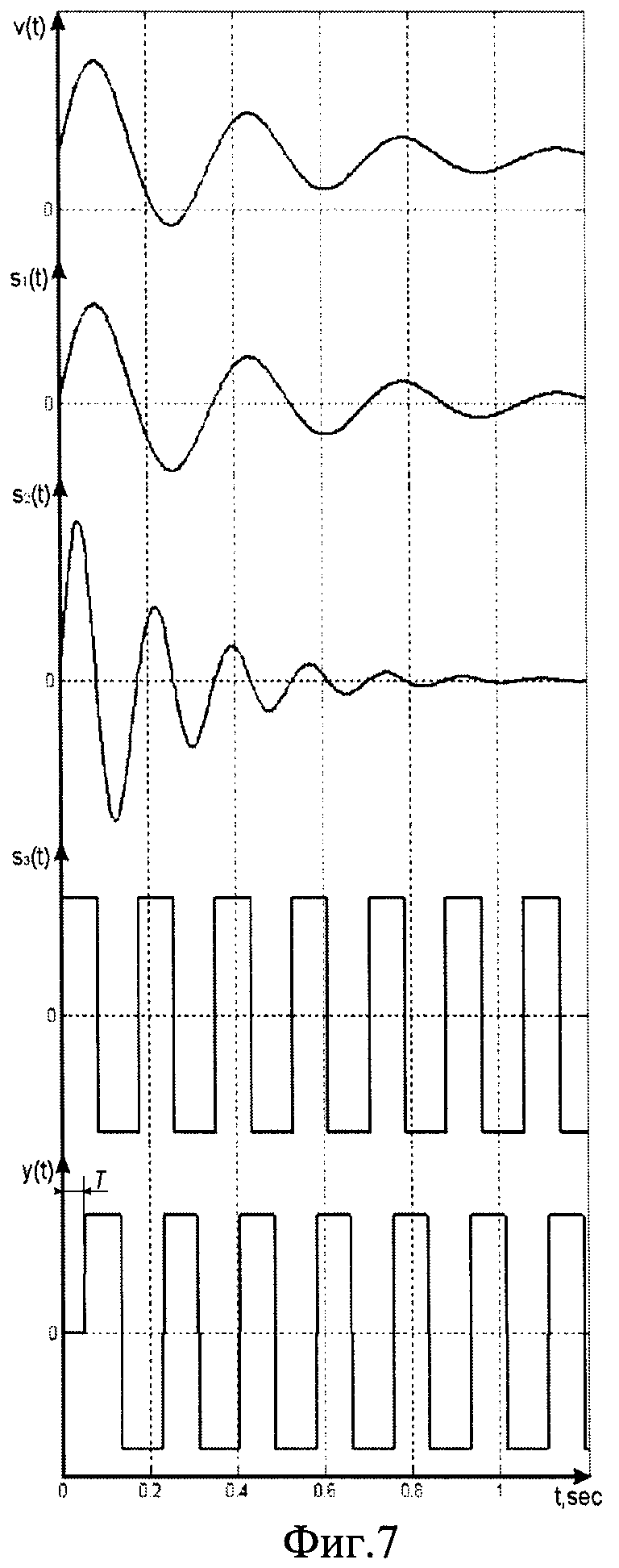
Способ стабилизации выходного сигнала колебательного объекта, включающий построение пропорционально-дифференциальной отрицательной обратной связи по выходному сигналу,
модуляцию пропорционального коэффициента управления в обратной связи модуляции h0,
отличающийся тем, что выходной сигнал фильтруют и выделяют гармонические составляющие, после чего удваивают их по частоте и стабилизируют по амплитуде А, максимальную амплитуду этих гармонических составляющих устанавливают равной глубине модуляции h0 пропорционального коэффициента управления обратной связи, глубину модуляции h0 выбирают из условия
каждую из гармонических составляющих задерживают на время Т,

где ω - частота главной гармонической составляющей; arg(W(jω)) - фазочастотная характеристика колебательного объекта на частоте ω,
после чего результирующий сигнал подают на управляющий вход модулятора коэффициента управления.
| СПОСОБ УПРАВЛЕНИЯ ОБЪЕКТОМ С ПАРАМЕТРИЧЕСКОЙ АДАПТАЦИЕЙ | 1992 |
|
RU2054193C1 |
| Способ стабилизации постоянного напряжения | 1978 |
|
SU903827A1 |
| Способ импульсной стабилизации постоянного напряжения и устройство для его осуществления | 1982 |
|
SU1120304A1 |
| Способ стабилизации постоянного напряжения и устройство для его осуществления | 1974 |
|
SU693352A1 |
| Устройство для измерения скорости асинхронного двигателя с фазным ротором | 1976 |
|
SU570839A1 |

