Изобретение относится к космической технике, более конкретно - к бортовым системам навигации (БСН) искусственных спутников Земли (ИСЗ) при орбитальном полете с высотой преимущественно до 500-600 км.
БСН обычно решает две взаимосвязанные задачи: во-первых, уточняет по результатам траекторных измерений положение и скорость ИСЗ на некоторый момент времени tут - параметры движения центра масс (ПДЦМ) и, во-вторых, используя принятую модель движения и эти параметры как начальные, прогнозирует их на требуемый момент tпр. Как правило, в модели движения на низких орбитах учитывают силы от гравитационного поля Земли и от аэродинамического воздействия верхней атмосферы, вектор ускорения от действия которой обычно записывают в виде
аат=SρVат 2v,
где S - баллистический коэффициент (БК) ИСЗ;
ρ - плотность атмосферы;
Vaт - скорость движения спутника относительно атмосферы;
v - единичный вектор скорости Vaт.
Точность прогнозируемых ПДЦМ для рассматриваемых ИСЗ связана, главным образом, с недостаточным знанием БК и плотности атмосферы (из-за случайной составляющей в ее изменении). Задача заключается в том, чтобы на интервале прогнозирования движения спутника использовать по возможности максимально точное значение величины Sρ.
В качестве прототипа выбрана БСН ИСЗ [Методы обеспечения живучести низкоорбитальных автоматических КА зондирования Земли: математическое моделирование, компьютерные технологии. / А.Н. Кирилин, Р.Н. Ахметов, А.В. Соллогуб, В.П. Макаров. М.: Машиностроение, 2010], содержащая устройство управления системой, устройство преобразования навигационных сигналов (НС) в навигационные параметры (НП), блок преобразования НП в ПДЦМ спутника и блок прогнозирования ПДЦМ. В этой системе использована статическая модель плотности атмосферы по ГОСТ 4401-81, в которой ρ зависит только от высоты полета спутника. Величину Sρ уточняют в наземном комплексе управления полетом путем коррекции S как коэффициента согласования расчетного движения ИСЗ с действительным на некотором (порядка 16-ти витков полета, предшествующих времени tyт) интервале его уточнения. Значение уточненного S передают в бортовой комплекс управления. При этом БК на интервале прогнозирования движения полагают постоянным и равным уточненному: Sпр=Sут.
Недостаток прототипа состоит в том, что из-за отличия используемого на интервале [tут, tпр] значения БК от фактического возможны значительные ошибки прогнозирования ПДЦМ ИСЗ, особенно при больших интервалах.
Задачей изобретения является увеличение точности прогнозирования ПДЦМ ИСЗ.
Поставленная задача решается благодаря тому, что в известной БСН ИСЗ, содержащей устройство управления системой и соединенные с ним устройство преобразования НС в НП, блок преобразования НП в ПДЦМ спутника, блок прогнозирования ПДЦМ, предусмотрены следующие отличия: в систему введены блок уточнения БК как параметра согласования расчетного и фактического движения спутника, блок накопления текущих значений баллистического коэффициента и блок прогнозирования баллистического коэффициента, причем устройство управления системой соединено с этими блоками.
При этом блок прогнозирования баллистического коэффициента имеет структуру, реализующую
либо адаптивный по параметрам модели алгоритм прогнозирования баллистического коэффициента, основанный, например, на соотношениях эмпирической регрессии [Бронштейн И.Н, Семендяев К.А. Справочник по математике для инженеров и учащихся ВТУЗов. - М.: Наука - 1980],
либо адаптивный по структуре и параметрам модели алгоритм прогнозирования баллистического коэффициента, основанный, например, на методе группового учета аргументов [Ивахненко А.Г., Юрачковский Ю.П. Моделирование сложных систем по экспериментальным данным. - М.: «Радио и связь» - 1987].
Техническая сущность предложенного устройства (системы навигации) поясняется графическими материалами:
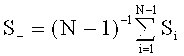
фиг. 1 - структурная схема БСН ИСЗ;
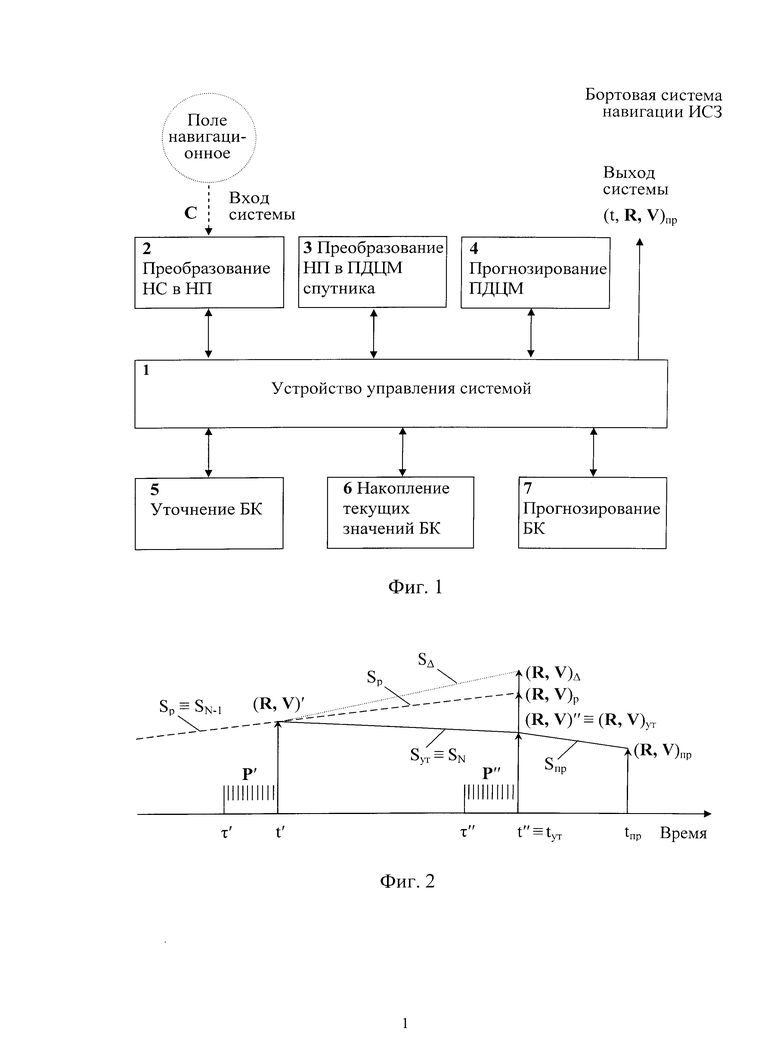
фиг. 2 - временная диаграмма, облегчающая понимание используемых для уточнения БК зависимостей.
Предложенная БСН ИСЗ (см. фиг. 1) содержит устройство 1 управления системой, устройство 2 преобразования НС в НП, блок 3 преобразования НП в ПДЦМ спутника и блок 4 прогнозирования ПДЦМ, при этом устройство 1 соединено с устройством 2 и блоками 3, 4.
Также БСН содержит (в отличие от прототипа) блок 5 уточнения БК, блок 6 накопления текущих значений БК и блок 7 прогнозирования БК, причем устройство 1 соединено с блоками 5, 6, 7.
Здесь устройство 1 управления системой включает обычные элементы электронной вычислительной машины: собственно устройство управления, память, процессор, устройства ввода-вывода и программное обеспечение. Устройство 2 содержит датчики и преобразующее устройство. Блоки 3-7 представляют собой области постоянной памяти, информация из которых считывается в оперативную память вычислительной машины.
БСН ИСЗ согласно изобретению работает следующим образом.
Устройство 1 управления системой задает устройству 2 время начала tн и конца tк навигационных измерений. Сигналы С от навигационного поля (например, радиосигналы от навигационных спутников) принимаются этим устройством, преобразуются в НП Р (например, радиальную дальность D и скорость  изменения радиальной дальности относительно навигационных спутников) и выдаются в устройство 1.
изменения радиальной дальности относительно навигационных спутников) и выдаются в устройство 1.
По завершении измерений устройство 1 подключает блок 3 для преобразования НП в ПДЦМ спутника:

где t - время;
R=(X, Y, Z), V=(Vx, Vy, Vz) - вектор положения и вектор скорости центра масс ИСЗ (с компонентами в некоторой системе координат).
Далее подключается блок 5, уточняющий с помощью блока 4 БК (см. фиг. 2):
[(t, R, V)′, (t, R, V)′′, Sp]→Sут.
Для этого используется, например, зависимость
Sут=Sp+(SΔ-Sp)(u′′-up)/(uΔ-up),
где Sp - расчетное (уточненное на предыдущем интервале) значение БК;
SΔ - «возмущенное» значение БК (можно положить равным 1,1·Sp);
u′′ - аргумент широты, соответствующий уточненным ПДЦМ (t, R, V)′′;
up - аргумент широты, соответствующий прогнозируемым с Sp ПДЦМ (t, R, V)p;
uΔ - аргумент широты, соответствующий прогнозируемым с SΔ ПДЦМ (t, R, V)Δ.
С помощью подключенного к устройству 1 блока 6 запоминается уточненное значение БК: Sут→SN.
Затем к устройству 1 подключается блок 7, который, используя накопленные S, рассчитывает прогнозируемое значение БК на время t>tут:
(S1, S2, …, SN≡Sут)→Sпр.
С этой целью можно применить (в простейшем случае) соотношение эмпирической прямой регрессии
Sпр=S++β(Sут - S-),
где 

С помощью блока 4 полученное значение БК используется для прогнозирования ПДЦМ на заданный момент tпр:
[(t, R, V)′′, Sпр]→(t, R, V)пр, которые выдаются в другие системы, например в систему управления движением ИСЗ.
Предложенная БСН ИСЗ обладает следующим техническим преимуществам перед прототипом: система с большей точностью прогнозирует ПДЦМ спутника благодаря возможности использовать более точную модель аэродинамического воздействия на интервале прогнозирования его движения.
Оценочные расчеты с использованием экспериментальных данных одного из ИСЗ, на котором уточнялся БК на интервале 8-ми витков, показали, что предлагаемое техническое решение позволит уменьшить усредненную неточность ΔSпр = |Sпр - SN+1| используемого на интервале прогнозирования БК относительно ΔSут = |Sут - SN+1|, то есть величину |ΔSпр - ΔSут|/ΔSут, на ≈ 10%. Примерно на такое же значение улучшится и точность прогнозирования положения спутника вдоль орбиты.
Так, например, для ИСЗ с высотой перигея × апогея 200×300 км и баллистическим коэффициентом 0,025 м3/(кгс·с2) при среднем значении ΔSут = 0,0025 м3/(кгс·с2) максимальные ошибки вдоль орбиты на интервале прогнозирования 12 ч (≈ 8 витков) уменьшатся за счет использования Sпр вместо Sут в среднем на 0,5 км (с 5,2 до 4,7 км). Вероятно, что с уменьшением (до некоторого предела) интервала уточнения БК следует ожидать еще большего повышения точности прогнозирования ПДЦМ спутника.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВИГАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2018 |
|
RU2686318C9 |
| СИСТЕМА ОЦЕНИВАНИЯ ПОМЕХОЗАЩИЩЕННОСТИ НАВИГАЦИОННОГО КОНТУРА ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ (ИСЗ) | 2010 |
|
RU2444752C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ГЕОСТАЦИОНАРНОГО СПУТНИКА | 2005 |
|
RU2313104C2 |
| СПОСОБ ГРУППОВОГО ОРБИТАЛЬНОГО ДВИЖЕНИЯ ИСКУССТВЕННЫХ СПУТНИКОВ | 2011 |
|
RU2592121C2 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| СПОСОБ И УСТРОЙСТВО ОБРАБОТКИ НАВИГАЦИОННЫХ СИГНАЛОВ И ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ДОЛГОСРОЧНОЙ КОМПАКТНОЙ ЭФЕМЕРИДНОЙ ИНФОРМАЦИИ | 2013 |
|
RU2550814C2 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| ИСКУССТВЕННЫЙ СПУТНИК | 1992 |
|
RU2087387C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ КОРРЕКТИРУЕМОЙ АВИАЦИОННОЙ БОМБОЙ | 2011 |
|
RU2489675C2 |
| Способ ориентации околоземного орбитального космического аппарата | 2021 |
|
RU2779658C1 |
Изобретение относится к бортовым системам навигации (БСН) искусственных спутников Земли (ИСЗ) на низких (с высотой до 500-600 км) орбитах. БСН содержит устройство управления системой и соединенные с ним устройство преобразования навигационных сигналов в навигационные параметры, блок преобразования навигационных параметров в параметры движения центра масс (ЦМ) ИСЗ и блок прогнозирования параметров движения ЦМ. В состав БСН введены соединенные с устройством управления системой блок уточнения баллистического коэффициента (БК) - как параметра согласования расчетного и фактического движения ИСЗ, блок накопления текущих значений БК и блок прогнозирования БК. В блоке прогнозирования БК использован адаптивный (по параметрам, либо также и по структуре модели) алгоритм прогнозирования БК. В алгоритме могут быть использованы соотношения эмпирической регрессии или метод группового учета аргументов. Техническим результатом изобретения является повышение точности прогнозирования движения ЦМ спутника. 2 ил.
Бортовая система навигации искусственного спутника Земли (ИСЗ), содержащая устройство управления системой и соединенные с ним устройство преобразования навигационных сигналов в навигационные параметры, блок преобразования навигационных параметров в параметры движения центра масс спутника и блок прогнозирования параметров движения центра масс спутника, отличающаяся тем, что в бортовую систему навигации включены соединенные с устройством управления системой блок уточнения баллистического коэффициента как параметра согласования расчетного и фактического движений ИСЗ, блок накопления текущих значений баллистического коэффициента и блок прогнозирования баллистического коэффициента, при этом блок прогнозирования баллистического коэффициента имеет структуру, реализующую либо адаптивный по параметрам модели алгоритм прогнозирования баллистического коэффициента, основанный, например, на соотношениях эмпирической регрессии, либо адаптивный по структуре и параметрам модели алгоритм прогнозирования баллистического коэффициента, основанный, например, на методе группового учета аргументов.
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПРОГНОЗИРОВАНИЯ ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА НИЗКИХ ОРБИТАХ, ПОДВЕРЖЕННОГО ВЛИЯНИЮ ТОРМОЖЕНИЯ В АТМОСФЕРЕ | 2011 |
|
RU2463223C1 |
| RU 2058920 C1, 27.04.1996 | |||
| US 20120046863 A1, 23.02.2012 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 1999 |
|
RU2150414C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ КОСМИЧЕСКОЙ СТАНЦИИ В ПОЛЕТЕ | 2005 |
|
RU2301181C2 |
| СИСТЕМА ОЦЕНИВАНИЯ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСЗ | 2009 |
|
RU2391265C1 |
| СИСТЕМА ОЦЕНИВАНИЯ ТОЧНОСТИ ПРОГНОЗИРОВАНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ (ИСЗ) | 2009 |
|
RU2397927C1 |
| Дисковая борона для обработки почвы в междурядьях многолетних насаждений | 1982 |
|
SU1076005A1 |
| US 6317660 B1, 13.11.2001. | |||

