Изобретение относится к области металлоизделий, может использоваться в гибочных станках для фиксации изделий прижимом с большой массой в нижнем положении.
Известно «Предохранительное устройство подъемника», авт. Я.М.Бреслер и др., SU 1041506, бюл. №34 от 15.09.90. Оно состоит из платформы, страховочной рейки, двух направляющих, рамы, собачки, пневмо- или гидроцилиндров, штока, звеньев с шарниром, упора с штоковой полостью.
Недостаток устройства: сложное устройство.
Известен также «Привод подъемника», авт. В.Д.Гвоздев, SU 1557093, бюл. №4 от 15.04.90. Он состоит из двухплечих рычагов, ведомых и ведущих роликов, подъемной платформы, роликов, тяги с изменяемой длиной, вертикальных направляющих, основания, осей, штока, привода перемещения, горизонтальных направляющих.
Известен также «Механизм для фиксации положения прижима гибочного станка», SU 1328028, В21D 5/04, 07.08.1987, назначение которого совпадает с назначением «Механизмом управления прижима гибочного станка».
Техническая задача: подъем, опускание, фиксация положения прижимного устройства в крайних - верхнем и нижнем положении.
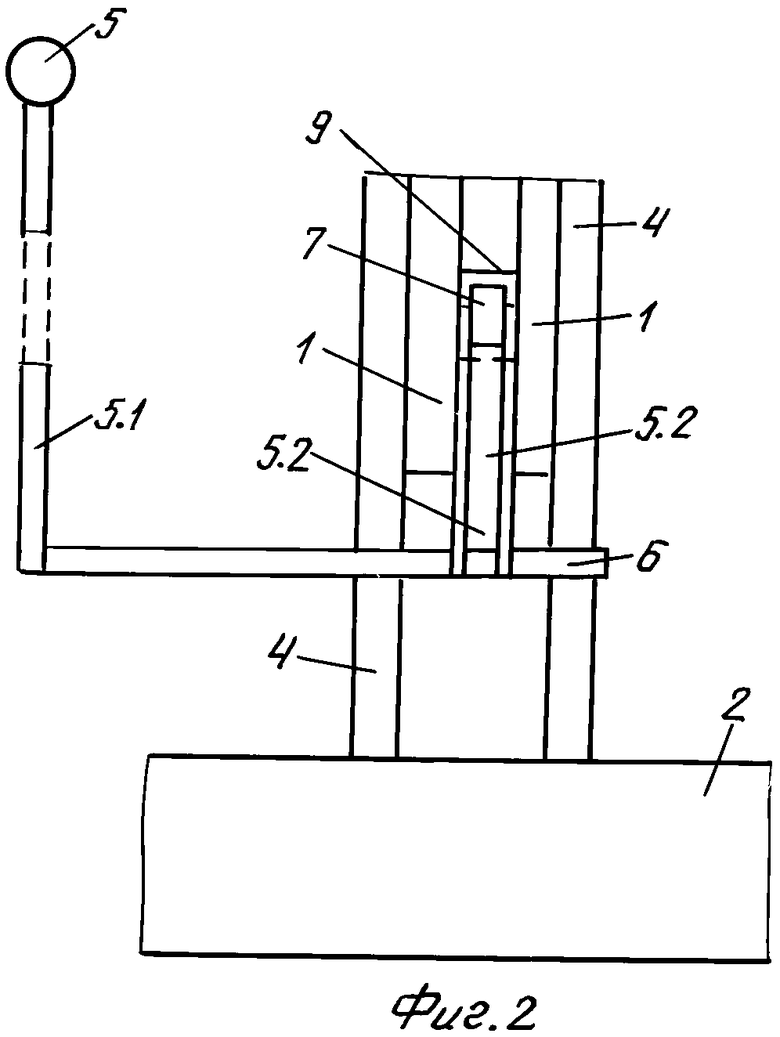
«Механизм управления прижима гибочного станка» связан с корпусом станка неподвижным элементом 1, прижим 2 служит для временного закрепления обрабатываемого изделия 3, подвижный элемент 4 связан прижимом 2, активное плечо 5.1 рычага управления 5 положением прижима 2 жестко соединено с осью 6, с осью 6 также жестко соединено пассивное плечо 5.2 рычага 5, в пассивном плече 5.2, подшипник 7, крепящийся пальцем 8, который, двигаясь по направляющему каналу 9, занимает крайние положения в углублениях 10 и 11, направляющий канал 9, вмонтированный в него неподвижный элемент 1 (см. фиг.1, 2).
Описание работы: при подъеме рычагом 5 посредством активного плеча 5.1 из-за связи 6 пассивного плеча 5.2, 7, 8, 9, подшипником 7 прижим фиксируется в верхнем положении в углублении 10 направляющего канала 9; при опускании рычагом 5 посредством активного плеча 5.1 из-за связи 6 пассивного плеча 5.2, 7, 8, 9 подшипником 7 прижим фиксируется в нижнем положении в углублении 11 направляющего канала 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ПРОДОЛЬНОЙ РЕЗКИ МЕТАЛЛОПРОКАТА | 2009 |
|
RU2411110C1 |
| КОНСОЛЬНОЕ УСТРОЙСТВО ЗАЖИМА РУЛОНА ПРИ РАЗМОТКЕ | 2008 |
|
RU2381857C1 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ ЮВЕЛИРНЫХ ИЗДЕЛИЙ | 2008 |
|
RU2392104C1 |
| ГИБОЧНЫЙ ЭЛЕКТРОМАГНИТНЫЙ СТАНОК | 2006 |
|
RU2317871C1 |
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО ДЛЯ РАЗМАТЫВАТЕЛЕЙ | 2011 |
|
RU2483820C1 |
| ДАТЧИК КОНТРОЛЯ СКОРОСТИ ПОДАЧИ ЛИСТОВОГО МЕТАЛЛА В ПРОКАТНЫЕ СТАНЫ | 2009 |
|
RU2397035C1 |
| КОНСОЛЬНОЕ УСТРОЙСТВО ЗАЖИМА РУЛОНА ИЗ МЕТАЛЛИЧЕСКОЙ ПОЛОСЫ | 2008 |
|
RU2381858C1 |
| ВАЛЬЦЕГИБОЧНЫЙ СТАНОК | 2006 |
|
RU2311251C2 |
| НОЖНИЦЫ ДЛЯ РЕЗКИ МЕТАЛЛОПРОКАТА | 2007 |
|
RU2356705C1 |
| СТАНОК ПОПЕРЕЧНОЙ РЕЗКИ МЕТАЛЛОПРОКАТА | 2011 |
|
RU2471592C2 |
Изобретение относится к области обработки металлов давлением, может использоваться в гибочных станках для фиксации изделий прижимом с большой массой в верхнем и нижнем положении. Механизм управления положением прижима гибочного станка содержит неподвижный элемент, связанный осью с корпусом станка. В неподвижный элемент вмонтирован направляющий канал, имеющий углубления на концевых участках. Имеются также подвижный элемент, связанный с прижимом, рычаг управления, выполненный в виде активного плеча, ось которого расположена в подвижном элементе, и жестко соединенного с ним в точке крепления к оси пассивного плеча с подшипником. Причем подшипник размещен в упомянутом направляющем канале с возможностью движения по нему и занятия углублений на концевых участках для фиксирования прижима в верхнем и нижнем положениях. Упрощается конструкция устройства. 2 ил.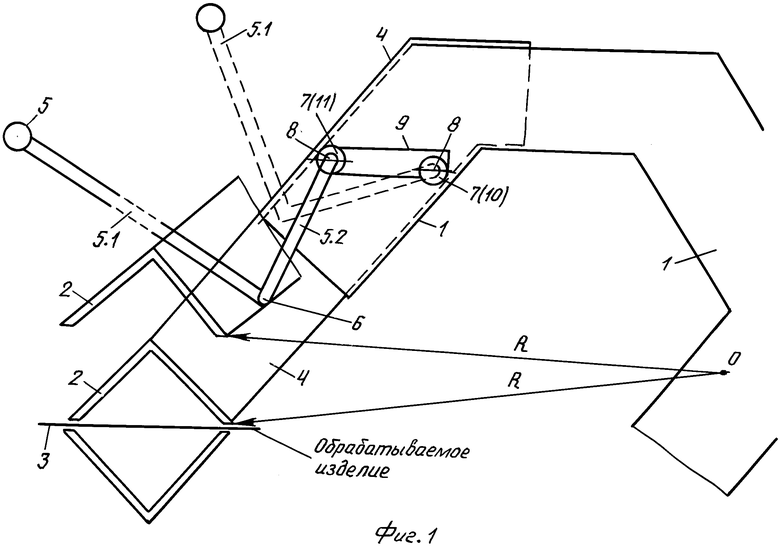
Механизм управления положением прижима гибочного станка, отличающийся тем, что он содержит связанный осью с корпусом станка неподвижный элемент с вмонтированным в него направляющим каналом, имеющим углубления на концевых участках, связанный с прижимом подвижный элемент, рычаг управления, выполненный в виде активного плеча, ось которого расположена в подвижном элементе, и жестко соединенного с ним в точке крепления к оси пассивного плеча с подшипником, причем подшипник размещен в упомянутом направляющем канале с возможностью движения по нему и занятия углублений на концевых участках для фиксирования прижима в верхнем и нижнем положениях.
| Станок для гибки листового металла | 1985 |
|
SU1328028A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ЗАЖИМА ЗАГОТОВОК | 0 |
|
SU188939A1 |
| Грузоподъемная ручная тележка | 1984 |
|
SU1346477A1 |
| Подъемник | 1988 |
|
SU1549911A2 |
| МАШИНА ДЛЯ ГИБКИ ЛИСТОВОГО ПРОКАТА | 1992 |
|
RU2019333C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ И ТРАНСПОРТИРОВАНИЯ П-ОБРАЗНОГО УПАКОВОЧНОГО КОРОБА | 1990 |
|
RU2011453C1 |
| US 3534637 А, 20.10.1970. | |||

