Изобретение относится к области эфемеридно-временного обеспечения космического аппарата спутниковой навигационной системы и предназначено для определения параметров движения и фазы навигационного сигнала космических аппаратов навигационных спутниковых систем типа ГЛОНАСС, GPS, Галилео.
Из уровня техники известны способы эфемеридно-временного обеспечения и системы для их реализации, основанные на измерении с помощью цифрового приемника псевдодальности до космического аппарата по навигационному сигналу, излучаемому самим космическим аппаратом, осреднении измерений на заданном интервале, расчете по измерениям параметров движения и фазы бортового хранителя шкалы времени по отношению к системной шкале (см. Л1-Л8).
Недостатком известных из уровня техники технических решений является то, что при измерении псевдодальности не представляется возможным разделить случайную составляющую погрешности измерений, возникающую в самом измерителе, и погрешности, возникающие в объекте измерений и среде распространения навигационного сигнала, что приводит к повышению погрешности измерений.
Известные измерители псевдодальности определяют ΔT - функцию радиальной дальности и фазы навигационного сигнала, задаваемой бортовым хранителем времени между источником сигнала с КА и опорным сигналом хранителя системного времени.
При измерении псевдодальности в реальное значение измеряемого параметра вносятся погрешности, имеющие две составляющие: случайную и систематическую.
Случайная составляющая погрешности имеет двоякое происхождение: собственные шумы приемника, погрешности, вызванные внешними возмущениями: нестабильностью хранителя бортового времени, многолучевостью (отражением сигнала от наземных и воздушных сигналов, промышленными помехами).
При осреднении (обычно на интервале 30 сек) отличить случайные составляющие погрешности от погрешностей внешнего происхождения невозможно, что приводит к увеличению погрешности измерения псевдодальности при осреднении измерений.
Сущность изобретения заключается в исключении в процессе осреднения измерений случайной составляющей погрешностей, имеющих внешнее по отношению к измерителю происхождение, что приводит к повышению точности измерений.
Собственная шумовая погрешность измерителя носит индивидуальный характер, не может быть синхронной для нескольких измерителей. Погрешность, вносимая внешними возмущениями, общая для любого количества измерителей, работающих от одной антенны, и поэтому при определении синхронности погрешности у двух приемников может быть выявлена и исключена.
Техническим результатом заявленной группы изобретений является повышение точности измерений псевдодальности до космического аппарата спутниковой навигационной системы типа ГЛОНАСС, GPS или Галилео.
Технический результат достигается тем, что способ измерения псевдодальности до космического аппарата спутниковой навигационной системы заключается в том, что принимают навигационный сигнал от одной приемной антенны двумя навигационными приемниками через разветвитель навигационного сигнала, фильтруют из принятого массива случайную составляющую погрешности измерений, анализируют синфазность случайной составляющей погрешности измерений, исключают из обработки на основе анализа измерения со случайной составляющей погрешности измерений, если фазы погрешности измерительного сигнала синфазны, а в случае, если фазы погрешности измерительного сигнала не совпадают, то измерительный сигнал осредняют и измеряют псевдодальность до космического аппарата спутниковой навигационной системы.
Система для реализации способа измерения псевдодальности до космического аппарата спутниковой навигационной системы содержит приемную антенну навигационного сигнала, цифровой навигационный приемник, вычислительное устройство, второй, идентичный первому, цифровой навигационный приемник, разветвитель принимаемого навигационного сигнала, анализатор синфазности случайной составляющей погрешности измерений, два селектора измерений и два фильтра случайной составляющей погрешности измерений, причем приемная антенна навигационного сигнала соединена через разветвитель принимаемого навигационного сигнала с первыми входами первого и второго цифровых приемников навигационного сигнала соответственно, на вторые входы которых подается опорный сигнал хранителя системного времени, первые выходы первого и второго цифровых приемников навигационного сигнала соединены соответственно с первыми входами первого и второго селектора измерений, а вторые выходы через первый и второй фильтры случайной составляющей погрешности измерений соединены соответственно с анализатором синфазности случайной составляющей погрешности измерений, первый и второй выходы которого соединены соответственно со вторыми входами первого и второго селекторов измерений, выходы которых соединены с вычислительным устройством, выполненным с возможностью осреднения измерительного навигационного сигнала и измерения псевдодальности до космического аппарата спутниковой навигационной системы.
Технический результат достигается путем проведения измерений одновременно двумя идентичными приемниками от одной антенны приема навигационного сигнала, выявления синхронных искажений значений псевдодальности и исключения их из массива обрабатываемой измерительной информации.
Признаки и сущность настоящего изобретения поясняются в последующем детальном описании, иллюстрируемом чертежом, на котором показана структурная схема системы измерения псевдодальности до космического аппарата спутниковой навигационной системы, где:
1 - первый цифровой приемник навигационного сигнала;
2 - первый селектор измерений;
3 - первый фильтр случайной составляющей погрешности измерений;
4 - разветвитель сигнала;
5 - анализатор синфазности;
6 - вычислительное устройство;
7 - второй фильтр случайной составляющей погрешности измерений;
8 - второй цифровой приемник навигационного сигнала;
9 - второй селектор измерений.
Принцип работы системы измерения псевдодальности до космического аппарата спутниковой навигационной системы основан на том, что случайная составляющая погрешности измерений, вызванная собственными шумами приемника, индивидуальна для каждого приемника и не может быть в общем случае синхронной для двух приемников.
Случайная составляющая погрешности, вызванная внешними возмущениями, синхронна для любого количества приемников, запитанных от одной антенны. Выявленные синхронные погрешности в обоих приемниках исключаются из обработки измерительного сигнала.
Работа системы для реализации способа измерения псевдодальности осуществляется следующим образом.
Навигационный сигнал от антенны через разветвитель сигнала поступает на вход двух идентичных приемников, фильтруют из принятого массива случайную составляющую погрешности измерений, анализатор синфазности сравнивает фазы случайной составляющей погрешности и если фазы не совпадают, то измерительный сигнал через селектор поступает в вычислитель для осреднения и измерения псевдодальности до космического аппарата спутниковой навигационной системы. Если фазы случайной составляющей погрешности в обоих приемниках синфазны, анализатор синфазности вырабатывает запрет на включение этого измерения в осреднение и обработку. Исключение из обработки измерений с внешней составляющей случайной погрешности осуществляется селектором измерений. Исключение из обработки измерений, имеющих случайную составляющую, вызванную внешними возмущениями, приводит к повышению точности измерений псевдодальности.
Источники информации
1. Патент Российской Федерации RU 2291561 С2 на изобретение «Способ обработки и оценки сигнала в системе позиционирования», оп. 10.01.2007, МПК Н04В 1/707 - (Л1).
2. Патент Российской Федерации RU 2070315 С1 на изобретение «Способ определения вектора состояния подвижного объекта при помощи навигационных космических аппаратов космической навигационной системы», оп. 10.12.1996, МПК G01C 21/00 - (Л2).
3. Патент Российской Федерации RU 217577Л С1 на изобретение «Способ выделения погрешностей в спутниковых радионавигационных системах», оп. 10.11.2001, МПК G01S 5/14 - (Л3).
4. Патент Российской Федерации RU 2263401 С2 на изобретение «Система радиосвязи с подвижными объектами», оп. 27.10.2005, МПК Н04В 7/26 - (Л4).
5. Свидетельство Российской Федерации RU 50005 U1 на полезную модель «Трехпозиционный измеритель координат источников радиоизлучений», оп. 10.12.2005, МПК G01S 5/02 - (Л5).
6. Поваляев Е., Хуторной С., ГЛОНАСС, Спутниковая навигация-пользовательское оборудование ГЛОНАСС, http://www.sat-tech.m/glonass-eguipment.shtml - (Л6).
7. Заявка на изобретение США US 2005212695 А1, «Bootstrapping tandem GPS navigation receivers», оп. 29.09.2005, МПК G01S 1/00 - (Л7).
8. Заявка на изобретение Япония JP 20011124840 А, «GPS RECEIVER AND POSITIONING METHOD», оп. 11.05.2001, МПК С01С 21/00 - (Л8).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИНХРОНИЗАЦИИ ШКАЛ ВРЕМЕНИ ДВУХ И БОЛЕЕ ТЕРРИТОРИАЛЬНО УДАЛЕННЫХ НАЗЕМНЫХ ХРАНИТЕЛЕЙ ВРЕМЕНИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537090C1 |
| ДВУХЧАСТОТНЫЙ ФАЗОВЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ЗАДЕРЖКИ СИГНАЛОВ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ В ИОНОСФЕРЕ | 2019 |
|
RU2717098C1 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО ДАННЫМ ПРИЕМНИКОВ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2388008C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ (ВАРИАНТЫ) | 2000 |
|
RU2185637C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2079148C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННО-ТОПОГЕОДЕЗИЧЕСКИХ ПАРАМЕТРОВ | 2010 |
|
RU2431803C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ (ВАРИАНТЫ) | 1997 |
|
RU2122217C1 |
Изобретение относится к области космического приборостроения и может найти применение в системах эфемеридно-временного обеспечения космических аппаратов (КА) спутниковой навигации ГЛОНАСС, GPS, Галилео и т.п. Технический результат - повышение точности измерений. Для достижения данного результата система содержит приемную антенну навигационного сигнала, два цифровых приемника навигационного сигнала, два селектора измерений, два фильтра случайной составляющей погрешности, разветвитель сигнала, анализатор синфазности и вычислительное устройство. При этом принимают навигационный сигнал от одной приемной антенны двумя навигационными приемниками через разветвитель навигационного сигнала. Затем выделяют случайную составляющую погрешности измерений и анализируют синфазность случайной составляющей погрешности измерений, которую исключают из дальнейшей обработки, если фазы погрешности измерительного сигнала синфазны. Если фазы погрешности измерительного сигнала не совпадают, то измерительный сигнал осредняют и измеряют псевдодальность до космического аппарата спутниковой навигационной системы. 2 н.п. ф-лы, 1 ил.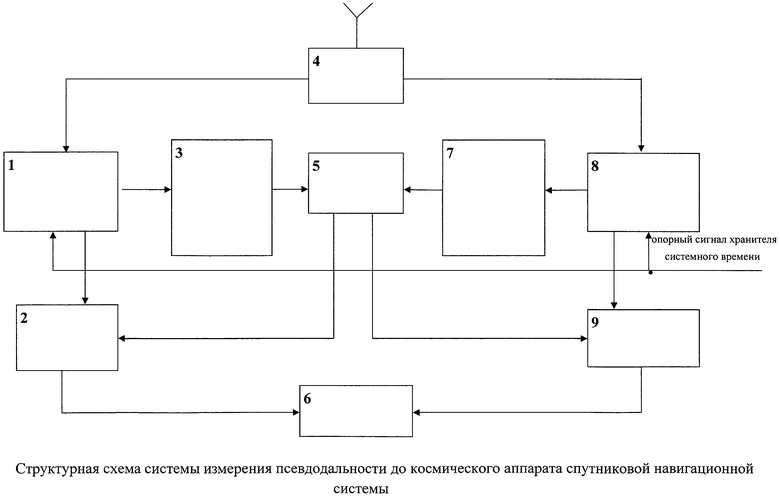
1. Способ измерения псевдодальности до космического аппарата спутниковой навигационной системы, заключающийся в том, что принимают навигационный сигнал от одной приемной антенны двумя навигационными приемниками через разветвитель навигационного сигнала, фильтруют из принятого массива случайную составляющую погрешности измерений, анализируют синфазность случайной составляющей погрешности измерений, исключают из обработки на основе анализа измерения со случайной составляющей погрешности измерений, если фазы погрешности измерительного сигнала синфазны, а в случае, если фазы погрешности измерительного сигнала не совпадают, то измерительный сигнал осредняют и измеряют псевдодальность до космического аппарата спутниковой навигационной системы.
2. Система измерения псевдодальности до космического аппарата спутниковой навигационной системы, содержащая приемную антенну навигационного сигнала, первый цифровой навигационный приемник, вычислительное устройство, второй, идентичный первому, цифровой навигационный приемник, разветвитель принимаемого навигационного сигнала, анализатор синфазности случайной составляющей погрешности измерений, два селектора измерений и два фильтра случайной составляющей погрешности измерений, причем приемная антенна навигационного сигнала соединена через разветвитель принимаемого навигационного сигнала с первыми входами первого и второго цифровых приемников навигационного сигнала соответственно, на вторые входы которых подается опорный сигнал хранителя системного времени, первые выходы первого и второго цифровых приемников навигационного сигнала соединены соответственно с первыми входами первого и второго селекторов измерений, а вторые выходы через первый и второй фильтры случайной составляющей погрешности измерений соединены соответственно с анализатором синфазности случайной составляющей погрешности измерений, первый и второй выходы которого соединены соответственно со вторыми входами первого и второго селекторов измерений, выходы которых соединены с вычислительным устройством, выполненным с возможностью осреднения измерительного навигационного сигнала и измерения псевдодальности до космического аппарата спутниковой навигационной системы.
| СПОСОБ ОБРАБОТКИ И ОЦЕНКИ СИГНАЛА В СИСТЕМЕ ПОЗИЦИОНИРОВАНИЯ | 2004 |
|
RU2291561C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ РАЗРЕШЕНИЯ НЕОДНОЗНАЧНОСТИ ПО ПСЕВДОДАЛЬНОСТИ ГЛОБАЛЬНОЙ СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ (ГСП) | 2000 |
|
RU2253127C2 |
| СТЕПАНОВ О.А | |||
| Применение теории нелинейной фильтрации в задачах обработки навигационной информации | |||
| - СПб.: ГНЦ РФ - ЦНИИ «Электроприбор», 1998, 370 с | |||
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ НАВИГАЦИИ | 1999 |
|
RU2155969C1 |
| ГЛОНАСС | |||
| Принципы построения и функционирования./Под ред | |||
| А.И.ПЕТРОВА, В.Н.ХАРИСОВА | |||
| - М: Радиотехника, 2005, с.448-458. | |||

