Изобретение относится к области навигации, в частности к способам инерциально-спутниковой навигации, предназначенным для определения углового положения объекта в инерциальном пространстве, и может быть использовано, например, при проектировании интегрированных систем ориентации и навигации.
Угловая ориентация объекта определяется параметрами ориентации, к которым могут быть причислены углы Эйлера-Крылова, параметры Родриго-Гамильтона, а также направляющие косинусы [Ишлинский А.Ю. Гироскопы, ориентация и инерциальная навигация. - М.: «Наука», 1976. - 672 с].
Известен способ определения параметров ориентации объекта при помощи бесплатформенной системы ориентации, построенной на трех датчиках угловой скорости [Анучин О.Н. Интегрированные системы ориентации и навигации для морских подвижных объектов/ О.Н.Анучин, Г.И.Емельянцев. - Санкт-Петербург: ГНЦ РФ ЦНИИ «Электроприбор», 2003. - 390 с.]. Способ состоит в обработке сигналов этих датчиков и получении в результате параметров ориентации. К достоинствам данных систем можно отнести автономность и возможность выдачи информации с высокой частотой.
К основным недостаткам данных систем причисляют наличие нарастающей со временем погрешности и зависимость точности от начальной выставки. Причем при определении параметров ориентации по сигналам глобальных спутниковых радионавигационных систем данный недостаток отсутствует.
Известен способ определения параметров ориентации объекта по сигналам глобальных спутниковых радионавигационных систем [Описание изобретения к патенту РФ №2022294 от 27.04.1992, МПК5 G01S 5/00, опубл. 30.10.1994], основанный на приеме сигналов навигационных спутников каждым из четырех антенно-приемных устройств, расположенных на объекте, выделении сигнала с частотой Доплера, определении набега фаз колебаний с частотой Доплера путем интегрирования их на мерном интервале и определении углового положения объектов.
Недостатком способа является длительное время, необходимое для определения параметров ориентации, так как для решения задачи ориентации необходимо, чтобы навигационные спутники за время измерения существенно переместились в пространстве. Необходимое время измерения соответствует десяткам минут - часам. Это существенно ограничивает возможность применения этого способа.
Известен способ определения параметров ориентации объекта по сигналам глобальных спутниковых радионавигационных систем [Описание изобретения к патенту РФ №2248004 от 30.04.2003, МПК7 G01S 5/00, опубл. 10.03.2005, Бюл. №7], основанный на определении координат четырех закрепленных на объекте не лежащих на одной прямой навигационных приемников.
Недостатками способа являются необходимость доступности навигационных сигналов не менее чем четырех навигационных спутников и возможные большие погрешности определения параметров ориентации в связи с тем, что в отдельные моменты времени координаты навигационных приемников могут определятся с низкой точностью по различным причинам (например, геометрический фактор, многолучевость, помехи распространению навигационного сигнала и т.п.).
Наиболее близким заявляемому способу по совокупности существенных признаков является способ определения угловой ориентации объекта при помощи интегрированной системы ориентации и навигации [Описание изобретения к патенту РФ №2276384 от 27.04.2004, МПК7 G01S 5/00, опубл. 10.05.2006, Бюл. №13]. Сущность способа заключается в определении параметров ориентации объекта по сигналам от инерциальной навигационной системы (например, бесплатформенной) и по сигналам двух навигационных спутников, принимаемым не менее чем тремя антеннами навигационных приемников, не расположенными на одной прямой. Приемники служат для определения углового положения объекта относительно направления на каждый из двух навигационных спутников. К достоинствам данного способа можно причислить отсутствие зависимости погрешности в определении параметров ориентации от точности начальной выставки и отсутствие нарастающей со временем погрешности в определении параметров ориентации.
Недостатком способа является необходимость доступности как минимум двух навигационных спутников для возможности определения параметров ориентации, что снижает точность интегрированной системы ориентации и навигации в данном случае и ограничивает ее эксплуатационные возможности.
Задача, решаемая настоящим изобретением, и достигаемый технический результат заключаются в создании очередного способа определения угловой ориентации подвижного объекта при помощи интегрированной системы ориентации и навигации в условиях ограниченной видимости навигационных спутников, повышении точности и расширении эксплуатационных возможностей навигационной системы, реализующей этот способ.
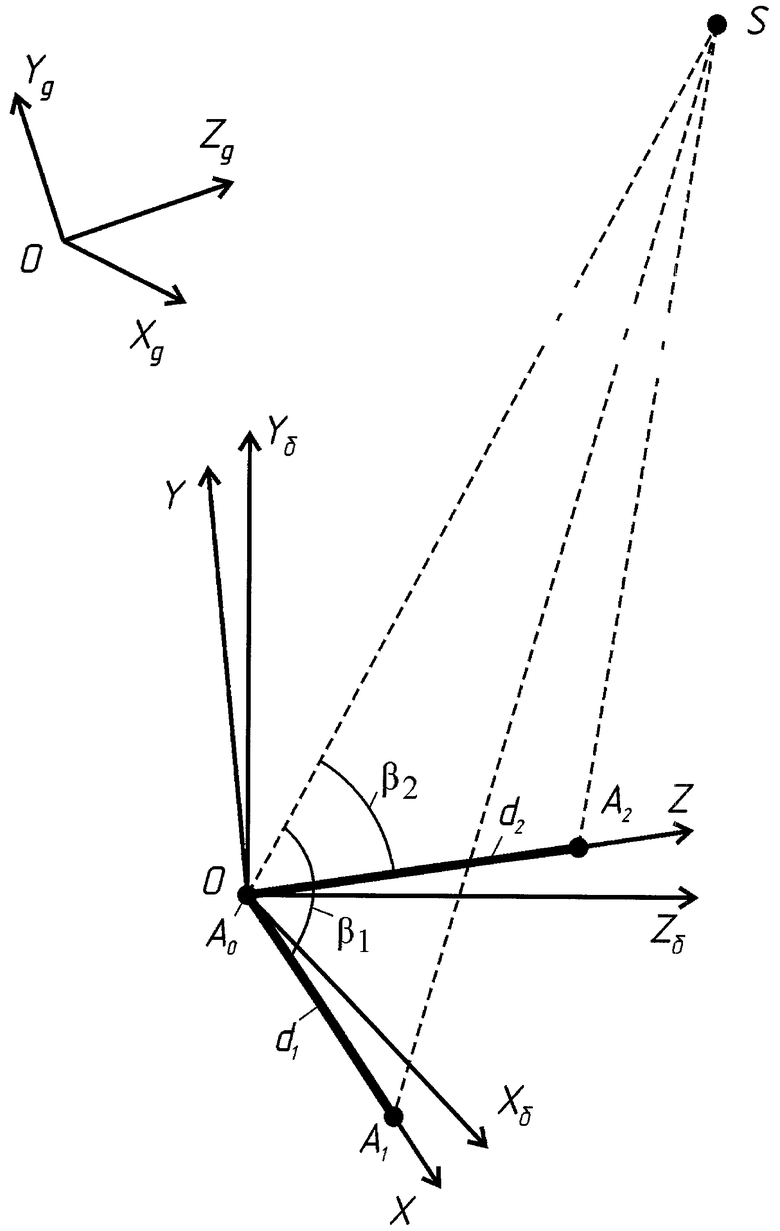
Изобретение иллюстрируется чертежом, где условно изображена решаемая задача определения параметров ориентации.
Для получения заявленного технического результата в известном способе определения угловой ориентации, включающем получение информации о координатах подвижного объекта от бортовой инерциальной навигационной системы, прием сигналов от спутниковой радионавигационной системы при помощи трех закрепленных на подвижном объекте и не лежащих на одной прямой антенн навигационных приемников А0, A1, A2, последующую обработку информации и получение значений параметров угловой ориентации, коррекцию ошибки в параметрах угловой ориентации, полученных от инерциальной навигационной системы, проводят с использованием сигналов одного доступного навигационного спутника, при этом по разности фаз сигналов, поступающих от спутника на разнесенные антенны А0 и A1 определяют угол β1 между базой антенн d1 и направлением на спутник, по информации от бортовой инерциальной навигационной системы о координатах и параметрах ориентации объекта и по информации от спутниковой навигационной системы о координатах спутника определяют угол β1 * между базой антенн d1 и направлением на спутник, по разности фаз сигналов, поступающих от спутника на разнесенные антенны А0 и A2, определяют угол β2 между базой антенн d2 и направлением на спутник, по информации от бортовой инерциальной навигационной системы о координатах и параметрах ориентации объекта и по информации от спутниковой навигационной системы о координатах спутника определяют угол β2 * между базой антенн d2 и направлением на спутник, в случае, если модуль разностей величин β1 и β1 *, β2 и β2 * превышает заданное значение, осуществляют коррекцию показаний ошибки в показаниях бортовой инерциальной навигационной системы.
Проанализируем существенность признаков изобретения. В результате воздействия искусственных или естественных помех, частичной неработоспособности спутниковой радионавигационной системы или по причине других подобных факторов возможны случаи, когда доступным становится сигнал только одного навигационного спутника. В этом случае необходимо использовать данные о значениях параметров ориентации подвижного объекта от инерциальной навигационной системы. Известно, что параметры ориентации, полученные от инерциальной навигационной системы, могут содержать нарастающую со временем ошибку, которая при необходимости корректируется при помощи спутниковой радионавигационной системы.
Способ определения угловой ориентации объекта реализуется следующим образом.
1. На подвижном объекте размещают интегрированную систему ориентации и навигации, состоящую из инерциальной системы ориентации и навигации, приемника навигационных сигналов, обрабатывающего информацию от трех антенн А0, A1, A2, служащих для приема сигналов спутниковых радионавигационных систем (например, ГЛОНАСС).
В общем случае, антенны могут быть размещены произвольным образом, но так, чтобы они не лежали на одной прямой. Для удобства далее рассмотрим случай размещения антенн в одной плоскости таким образом, что антенны А0 и A1 находятся на продольной оси ОХ, а антенны А0 и А2 находятся на оси OZ, связанной с подвижным объектом системы координат OXYZ. Расстояния между антеннами А0-А1 и А0-A2 известны и равны d1 и d2 соответственно.
2. При помощи инерциальной системы ориентации и навигации определяют координаты точки закрепления антенны A0  в базовой системе координат OXgYgZg и угловую ориентацию связанной с объектом системы координат OXYZ в базовой системе координат OXgYgZg в виде матрицы направляющих косинусов [Пельпор Д.С. Гироскопические системы. Учебник для вузов. /Д.С.Пельпор, И.А.Мигалев, В.А.Бауман и др.; Под ред. Д.С.Пельпора. - 2-е изд., перереб. и доп. - М.: Высш. шк., 1988. - 424 с.]:
в базовой системе координат OXgYgZg и угловую ориентацию связанной с объектом системы координат OXYZ в базовой системе координат OXgYgZg в виде матрицы направляющих косинусов [Пельпор Д.С. Гироскопические системы. Учебник для вузов. /Д.С.Пельпор, И.А.Мигалев, В.А.Бауман и др.; Под ред. Д.С.Пельпора. - 2-е изд., перереб. и доп. - М.: Высш. шк., 1988. - 424 с.]:
В базисе OXgYgZg по показаниям инерциальной навигационной системы можно аналитически построить систему координат OXбYбZб, направление осей которой в результате ошибок начальной выставки или нарастающей со временем погрешности не совпадает с направлением осей системы координат OXYZ.
3. В навигационном сигнале, передаваемом спутником, содержится информация о координатах спутника в геоцентрической системе координат. По этой информации находят координаты спутника в базовой системе координат S  .
.
4. Зная координаты точек A0, определенные в соответствии с п.2, и координаты точки S, определяем положение вектора  в базовой системе координат:
в базовой системе координат:

5. Находим косинус угла между векторами  и
и  :
:

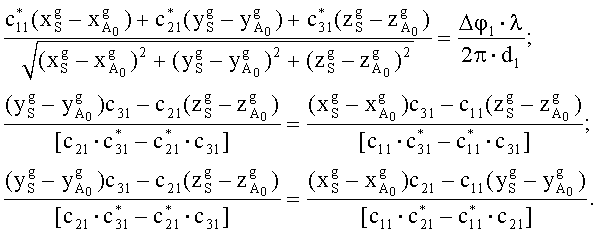
6. По сигналам, поступающим от спутника S на разнесенные антенны A0 и A1, определяем косинус угла β1 между базой антенн d1 и направлением на спутник, т.е. между векторами  и
и  , по формуле:
, по формуле:

где β1 - угол между вектором и направлением на спутник S, определенный с помощью аппаратуры СРНС, λ - длина волны сигнала, излучаемого спутником S, Δφ1 - разница фаз сигналов, принимаемых антеннами A0 и A1 от спутника S, d1 - расстояние между антеннами A0 и A1.
7. В случае, если величины cosβ1 и cosβ1 ∗ отличаются между собой на величину, большую заранее заданной (обозначим ее Δ), то, следовательно, определенное с помощью БИНС положение оси  отличается от истинного положения оси
отличается от истинного положения оси  , на которой расположены антенны A0, A1, и поэтому производят вычисление скорректированных параметров угловой ориентации. Находят вектор
, на которой расположены антенны A0, A1, и поэтому производят вычисление скорректированных параметров угловой ориентации. Находят вектор  причем угол между искомым вектором
причем угол между искомым вектором  и направлением на спутник S должен составлять β1.
и направлением на спутник S должен составлять β1.
Составим уравнение плоскости, проходящей через вектора ,  :
:

где хр, ур, zp - переменные в уравнении плоскости.
Составим уравнение плоскости, проходящей через вектора , :

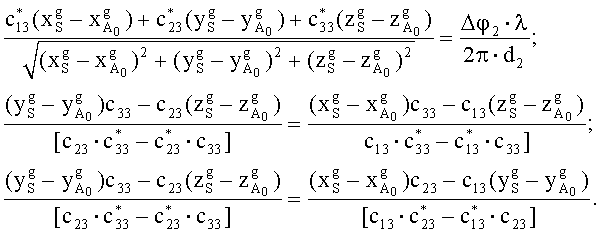
Предполагается, что векторы , ,  и лежат в одной плоскости и, следовательно, вектор
и лежат в одной плоскости и, следовательно, вектор  может быть найден из решения системы уравнений:
может быть найден из решения системы уравнений:
8. В случае, если величины cosβ1 и cosβ∗ 1 отличаются между собой на величину, меньшую заранее заданной Δ, то за вектор  принимают вектор
принимают вектор  (c11, c21, c31).
(c11, c21, c31).
Далее действия повторяются аналогично в отношении антенн A0 и A2.
9. По сигналам, поступающим от спутника S на разнесенные антенны A0 и A2, определяют косинус угла β2 между базой антенн d2 и направлением на спутник, т.е. между векторами  и
и  , по формуле:
, по формуле:
где β2 - угол между вектором и направлением на спутник S, определенный с помощью аппаратуры СРНС, λ - длина волны сигнала излучаемого спутником S, Δφ2 - разница фаз сигналов, принимаемых антеннами A0 и A2 от спутника S, d2 - расстояние между антеннами A0 и A2.
10. Находим косинус угла между векторами  и
и  :
:

11. В случае, если величины cosβ2 и cosβ2 ∗ отличаются между собой на величину, большую заранее заданной Δ, то, следовательно, определенное с помощью БИНС положение оси  отличается от истинного положения оси OZ, на которой расположены антенны A0, A2, и поэтому производят вычисление скорректированных параметров угловой ориентации. Находят вектор
отличается от истинного положения оси OZ, на которой расположены антенны A0, A2, и поэтому производят вычисление скорректированных параметров угловой ориентации. Находят вектор  причем угол между искомым вектором
причем угол между искомым вектором  и направлением на спутник S должен составлять β2.
и направлением на спутник S должен составлять β2.
Составим уравнение плоскости, проходящей через вектора , 

где xp, yp, zp - переменные в уравнении плоскости.
Составим уравнение плоскости, проходящей через векторы  ,
, 

В этом случае вектор 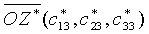 может быть найден из решения системы уравнений:
может быть найден из решения системы уравнений:
12. В случае, если величины cosβ2 и cosβ2 ∗ отличаются между собой на величину, меньшую заранее заданной Δ, то за вектор принимают вектор  (c13, с23, с33).
(c13, с23, с33).
13. Положение третьей оси связанной системы координат  можно найти как векторное произведение векторов
можно найти как векторное произведение векторов  и :
и :
Таким образом получают скорректированную матрицу направляющих косинусов, однозначно определяющую угловую ориентацию объекта относительно базовой системы координат OXgYgZg:
Проведенное математическое моделирование показало работоспособность предлагаемого способа.
В результате решения поставленной задачи был создан очередной способ определения угловой ориентации подвижного объекта в условиях ограниченной видимости навигационных спутников, повысилась точность и расширились эксплуатационные возможности интегрированной системы ориентации и навигации, реализующей этот способ в условиях доступности сигнала одного навигационного спутника.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛУ РАДИОНАВИГАЦИОННОГО ОРИЕНТИРА | 2008 |
|
RU2367909C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ С БЫСТРЫМ ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2014 |
|
RU2561003C1 |
| УСТРОЙСТВО ЛОКАЦИИ И НАВИГАЦИИ | 2012 |
|
RU2525228C2 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2015 |
|
RU2633703C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2004 |
|
RU2276384C2 |
| Способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации | 2020 |
|
RU2776856C2 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2015 |
|
RU2580827C1 |
| Способы коррекции показаний инерциальной части радиоинерциальной системы навигации | 2023 |
|
RU2840478C2 |
Изобретение относится к области навигации. Достигаемый технический результат - определение угловой ориентации подвижного объекта в условиях ограниченной видимости навигационных спутников, повышение точности и расширение эксплуатационных возможностей интегрированной системы ориентации и навигации, реализующей этот способ в условиях доступности сигнала одного навигационного спутника. Заявленный способ включает получение информации о координатах подвижного объекта от бортовой инерциальной навигационной системы, прием сигналов от спутниковой радионавигационной системы при помощи трех закрепленных на подвижном объекте и не лежащих на одной прямой антенн навигационных приемников А0, A1, A2, последующую обработку информации и получение значений параметров угловой ориентации, при этом обработку информации проводят путем коррекции ошибки в параметрах угловой ориентации, полученных от инерциальной навигационной системы, с использованием сигналов одного доступного навигационного спутника, по разности фаз сигналов, поступающих от спутника на разнесенные антенны А0 и A1, определяют угол β1 между базой антенн d1 и направлением на спутник, по информации от бортовой инерциальной навигационной системы о координатах и параметрах ориентации объекта и по информации от спутниковой навигационной системы о координатах спутника определяют угол β1* между базой антенн d1 и направлением на спутник, по разности фаз сигналов, поступающих от спутника на разнесенные антенны А0 и А2, определяют угол β2 между базой антенн d2 и направлением на спутник, по информации от бортовой инерциальной навигационной системы о координатах и параметрах ориентации объекта и по информации от спутниковой навигационной системы о координатах спутника определяют угол β2* между базой антенн d2 и направлением на спутник, в случае, если величины β1 и β1*, β2 и β2* отличаются между собой на величину больше заданной, осуществляют коррекцию ошибки в параметрах угловой ориентации, полученных от бортовой инерциальной навигационной системы. 1 ил.
Способ определения угловой ориентации объекта, включающий получение информации о координатах подвижного объекта от бортовой инерциальной навигационной системы, прием сигналов от спутниковой радионавигационной системы при помощи трех закрепленных на подвижном объекте и не лежащих на одной прямой антенн навигационных приемников А0, A1, A2, последующую обработку информации и получение значений параметров угловой ориентации, отличающийся тем, что обработку информации проводят путем коррекции ошибки в параметрах угловой ориентации, полученных от инерциальной навигационной системы, с использованием сигналов одного доступного навигационного спутника, при этом по разности фаз сигналов, поступающих от спутника на разнесенные антенны А0 и A1 определяют угол β1 между базой антенн d1 и направлением на спутник, по информации от бортовой инерциальной навигационной системы о координатах и параметрах ориентации объекта и по информации от спутниковой навигационной системы о координатах спутника определяют угол β1* между базой антенн d1 и направлением на спутник, по разности фаз сигналов, поступающих от спутника на разнесенные антенны А0 и A2, определяют угол β2 между базой антенн d2 и направлением на спутник, по информации от бортовой инерциальной навигационной системы о координатах и параметрах ориентации объекта и по информации от спутниковой навигационной системы о координатах спутника определяют угол β2* между базой антенн d2 и направлением на спутник, в случае, если величины β1 и β1*, β2 и β2* отличаются между собой на величину больше заданной, осуществляют коррекцию ошибки в параметрах угловой ориентации, полученных от бортовой инерциальной навигационной системы.
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2004 |
|
RU2276384C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСОВОГО УГЛА И КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ | 1992 |
|
RU2022294C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ОТНОСИТЕЛЬНО ВЕКТОРА СИЛЫ ТЯЖЕСТИ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2007 |
|
RU2343418C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2273826C2 |
| US 5841370 A, 24.11.1998 | |||
| US 6760664 B1, 06.07.2004 | |||
| US 5296861 A, 22.03.1994. | |||

