Изобретение относится к гидроавтома- тике и может быть использовано в системах управления металлургических машин и испытательных стендов.
Целью изобретения является повын1ение быстродействия и надежности.
На чертеже изображена схема устройства для осуществления предлагаемого способа управления объемным гидравлическим приводом.
Устройство содержит насос 1 и гидромотор 2, связанные гидролиниями 3 и 4 и образующие объемный гидравлический привод с гидродвигателем 5, подключенным к гидролинии 3.электродвигатели 6 и 7, соединенные валами (не показано) с насосом 5 Ш„ насоса (гидромотора).
20
1 и гидромотором 2 и с датчиками 8 и 9 частот вращения, датчик 10 давления нагнетания насоса I, задатчик 11 частот вращения и задатчик 12 давления, регуляторы 13 и 14 частоты вращения насоса I и гидромотора 2, связанные входами с датчиками 8 и 9 и задатчиком 11, а выходами через регуляторы 15 и 16 тока - с источниками 17 и 18 электропитания электродвигателей 6 и 7. Устройство снабжено также пороговым устройством 19, блоком 20 вычитания, 25 блоком 21 деления, инвертором 22 и суммирующим усилителем 23, выполненны.м с управляемой цепью щунтирования (не показана) .
Датчики 8 и 9 подключены к входам блока 20, которого соединен с входом делимого блока 21, вход делителя последнего соединен с датчиком 8, а выход - с одним из входов усилителя 23, другой вход которого подключен к задатчику 12, цепь шунтирования через пороговое уст
30
Объем жидкости 4 связан с производительностью Q насоса 1 и временем t соотношением
Vo Qt K-Vn-S-t,(2)
где 3 сечение трубопровода гидролинии 3;
К - коэффициент пропорциональности между частотой вращения оЭдприводного вала насоса 1 и скоростьюi поступательного движения жидкости в трубопроводе гидролинии 3.
После преобразований выражение (1) примет следующий вид
ЛР i.E ,
0
7/
(3)
где
l)
скорость поступательного движения сжатой жидкости. Следовательно, в гидравлическом про- ройство 19 связана сдатчиком 10, а выход -воде изменение давления лР пропорциональ40
45
с регулятором 13 и через инвертор 22 - с регулятором 14.
Устройство для осуществления способа работает следующим образо.м.
При подаче задающих сигналов задатчиком 11 электродвигатели 6 и 7 приводят во вранхение насос 1 и гидромотор 2. В гидролинии 3 и гидродвигателе 5 возникает давление, определяемое относительной разностью частот вращения насоса 1 и гидромотора 2. Электродвигатель 6 работает в двигательном, а электродвигатель 7 - в генераторном (тормозном) режиме.
Абсолютная разность частот вращения, измеренная датчиками 8 и 9 и блоком 20, преобразуется блоком 21 в относительную 50 разность частот в виде отнощения разности частот врапдения насоса 1 и гидромотора 2 к частоте вращения насоса 1.
Объемная дефор.мация жидкости -- -
Vo
в гидролинии 3 при сжатии пропорциональна изменению давления .flP и определяется соотношением
лР,Е,(1)
о
но относительной разности частот вращения насоса 1 и гидромотора 2, создающих режим сжатия жидкости в гидролинии 3 и гидродвигателе 5.
Если контролируемая максимальная величина допустимого давления, определяемая относительной разностью частот вращения насоса 1 и гидромотора 2, должна оставаться неизменной при различных уровнях частот вращения обеих гидромапшн, то такое условие может быть выполнено при изменении разности частот вращения пропорционально уровню частоты вращения.
(Например, если при частоте вращения насоса 150 рад/С разность частот вращения обеих гидромащин равна 20 рад/С, то при частоте вращения насоса 75 рад/С указанная разность частот вращения должна составлять 10 рад/С, при 37,5 рад/С эта разность должна быть 5 рад/С и т.д.)
Неизменной относительной разности частот врап1ения соответствует неиз.менное давление в гидролинии 3.
где Е - объемный модуль упругости жидкости; изменение объема жидкости при
изменении давления; Vo - начальный объем жидкости (при атмосферном давлении) в гидролинии 3;
V -объем жидкости при изменении давления на величину и Р в гидролинии 3.
При отсутствии давления, т.е. при отсутствии нагрузки на валу гидромотора 2, величина объема жидкости 4 , циркулирующей по замкнутому контуру гидропривода, пропорциональна частоте вращения
0
5
0
Объем жидкости 4 связан с производительностью Q насоса 1 и временем t соотношением
Vo Qt K-Vn-S-t,(2)
где 3 сечение трубопровода гидролинии 3;
К - коэффициент пропорциональности между частотой вращения оЭдприводного вала насоса 1 и скоростьюi) поступательного движения жидкости в трубопроводе гидролинии 3.
После преобразований выражение (1) примет следующий вид
ЛР i.E ,
0
7/
(3)
где
l)
Сле воде из
0
5
0
но относительной разности частот вращения насоса 1 и гидромотора 2, создающих режим сжатия жидкости в гидролинии 3 и гидродвигателе 5.
Если контролируемая максимальная величина допустимого давления, определяемая относительной разностью частот вращения насоса 1 и гидромотора 2, должна оставаться неизменной при различных уровнях частот вращения обеих гидромапшн, то такое условие может быть выполнено при изменении разности частот вращения пропорционально уровню частоты вращения.
(Например, если при частоте вращения насоса 150 рад/С разность частот вращения обеих гидромащин равна 20 рад/С, то при частоте вращения насоса 75 рад/С указанная разность частот вращения должна составлять 10 рад/С, при 37,5 рад/С эта разность должна быть 5 рад/С и т.д.)
Неизменной относительной разности частот врап1ения соответствует неиз.менное давление в гидролинии 3.
Таким образом, сигнал при выходе блока 21 является корректирующим, а результирующий сигнал в цепи управления током каждого из электродвигателей 6 и 7 формируется путем алгебрического суммирования задающих сигналов задатчика 12 и этого корректирующего сигнала суммирующим усилителем 23 и алгебраического суммирования регуляторами 13 и 14 сигналов усилителя 23, датчиков 8 и 9 и задатчика 11.электродвигатели, соединенные валами с Пороговым устройством 19 осуществля- насосом и гидромотором и с датчиками час- ется сравнение измеренной датчиком 10 величины давления с допустимой величиной, а в случае превыщения измеренной величиной давления допустимой величины, формируется другой корректирующий сиг- 15 частот вращения, а выходами - с источ- нал, включающий цепь шунтирования сум-никами электропитания электродвигателей,
отличающееся тем, что, с целью повыщения быстродействия и надежности, оно снабжено пороговым устройством, блоком вычитания, блоком деления, инвертором и суммирующим усилителем, выполненным с 1. Способ управления объемным гид-управляемой цепью щунтирования, при этом
равлическим приводом, включающий пода-датчики частот вращения насоса и гидрочу задающих сигналов для управления час-мотора подключены к входам блока вычитотами вращения приводов насоса и гид-тания, выход которого соединен с входом
ромотора, измерение давления нагнетания 25 делимого блока деления, вход делителя по- насоса и частот вращения насоса и гидро-следнего соединен с датчиком частоты вранасоса и гидромотора к частоте вращения насоса, а другой корректирующий сигнал формируется после сравнения измеренной величины давления с допустимой величиной в случае превыщения измеренной величиной давления допустимой величины.
2. Устройство для управления объемным гидравлическим приводом, содержащее насос и гидромотор, связанные гидролиниями.
тот вращения, датчик давления нагнетания насоса, задатчики частот вращения и давления и регуляторы частоты вращения, связанные входами с датчиками и задатчиком
матора 23 и снижающий уровень выходного сигнала последнего.
Формула изобретения
20
мотора и формирование корректирующих сигналов, а также формирование результирующих сигналов путем алгебраического суммирования задающих корректирующих сигналов, отличающийся тем, что, с целью повыщения быстродействия и надежности, один корректирующий сигнал формируется в виде отнощения разности частот вращения
30
щения насоса, а выход - с одним из входов суммирующего усилителя, другой вход которого подключен к задатчику давления, цепь шунтирования через пороговое устройство связана с датчиком давления, а выход - с регулятором частоты вращения насоса и через инвертор - с регулятором частоты вращения гидромотора.
электродвигатели, соединенные валами с насосом и гидромотором и с датчиками час- частот вращения, а выходами - с источ- никами электропитания электродвигателей,
насоса и гидромотора к частоте вращения насоса, а другой корректирующий сигнал формируется после сравнения измеренной величины давления с допустимой величиной в случае превыщения измеренной величиной давления допустимой величины.
2. Устройство для управления объемным гидравлическим приводом, содержащее насос и гидромотор, связанные гидролиниями.
электродвигатели, соединенные валами с насосом и гидромотором и с датчиками час- частот вращения, а выходами - с источ- никами электропитания электродвигателей,
тот вращения, датчик давления нагнетания насоса, задатчики частот вращения и давления и регуляторы частоты вращения, связанные входами с датчиками и задатчиком
20
щения насоса, а выход - с одним из входов суммирующего усилителя, другой вход которого подключен к задатчику давления, цепь шунтирования через пороговое устройство связана с датчиком давления, а выход - с регулятором частоты вращения насоса и через инвертор - с регулятором частоты вращения гидромотора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 1990 |
|
RU2005924C1 |
| Устройство управления групповым гидроприводом | 1989 |
|
SU1707290A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
| СПОСОБ РЕКУПЕРАЦИИ ЭНЕРГИИ ГИДРОПРИВОДА ПОВОРОТНОЙ ПЛАТФОРМЫ ЭКСКАВАТОРА | 2016 |
|
RU2618154C1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2010 |
|
RU2425257C1 |
| Мультироторная летающая платформа с гидроприводом вращения несущих винтов | 2022 |
|
RU2799957C1 |
| Автоматизированный электрогидравлический стенд для обкатки и испытания редукторов с двумя пересекающимися кинематическими цепями | 1990 |
|
SU1740812A1 |
| Сегментный затвор с гидравлическим приводом | 2022 |
|
RU2810327C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Электрогидравлическая система | 1989 |
|
SU1781467A1 |
Изобретение позволяет повысить быстродействие и надежность гидропривода. При подаче задающих сигналов задатчи- ком 11 электродвигатели 6 и 7 приводят во вращение насос 1 и гидромотор 2. В гидролинии 3 и гидродвигателе 5 возникает давление, определяемое относительной разностью частот вращения насоса и гидромотора. Абсолютная разность частот, измеренная датчиками 8 и 9 и блоком 20 вычитания, преобразуется блоком 21 деления в относительную разность частот в виде отнощения разности частот вращения насоса и гидромотора к частоте вращения насоса. Неизменной относительной разности частот соответствует неизменное давление в гидролинии 3. Т.о., сигнал на выходе блока 21 является корректирующим. Результирующий сигнал в цепи управления током электродвигателей 6, 7 формируется путем алгебраического суммирования задающих и корректирующего сигналов суммирующим усилителем 23 и алгебраического суммирования регуляторами 13, 14 сигналов усилителя 23, датчиков 8, 9 и задатчика 11. В случае превыщения измеренной датчиком 10 величины давления допустимой величины формируется другой корректирующий сигнал, включающий цепь щунтирования усилителя 23 и снижающий уровень выходного сигнала последнего. 2 с.п. ф-лы, 1 ил. i (Л /5 W , I СХЭ со ел СП со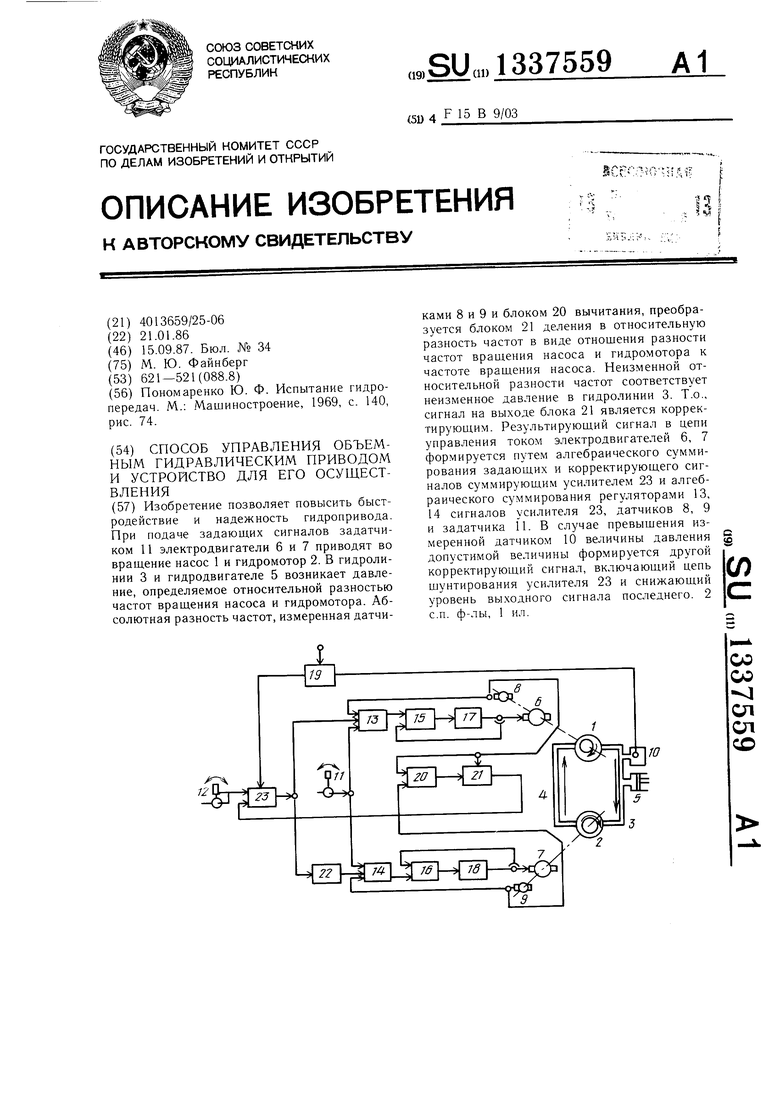
| Пономаренко Ю | |||
| Ф | |||
| Испытание гидропередач | |||
| М.: Машиностроение, 1969, с | |||
| Способ закалки пил | 1915 |
|
SU140A1 |
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
