Изобретение касается подводных исследований и может быть использовано в донных маяках-ответчиках гидроакустических систем навигации (МО ГАНС).
Известен (RU, изобретение 2058567 от 20.04.1996) маяк-ответчик гидроакустической системы навигации, в котором увеличение продолжительности функционирования обеспечивается за счет программного отключения приемного канала.
Недостатком данного изобретения является то, что не принято никаких мер по сокращению энергопотребления при работе в режиме приема и излучения.
Известен (RU, изобретение 2125733 от 27.01.1999) гидроакустический маяк-ответчик, который позволяет существенно повысить срок службы маяка-ответчика и возможность его длительного сохранения под водой с разряженной аккумуляторной батареей с последующим всплытием маяка по команде на всплытие.
Недостатком данного изобретения является низкая функциональность МО ГАНС, особенно при работе в режиме энергосбережения.
Технической задачей, на решение которой направлено изобретение, является увеличение продолжительности автономной работы и расширение функциональности МО ГАНС.
Для достижения указанной технической задачи МО ГАНС, включающий приемопередающую гидроакустическую (ГА) антенну, высоковольтный и низковольтный блоки питания, стабилизатор напряжения, усилители входного и выходного сигналов, маломощные аналого-цифровой и цифроаналоговый преобразователь, маломощную программируемую логическую интегральную схему (ПЛИС), дополнен схемой управления тактовой частотой. Расширение функциональности МО ГАНС достигается за счет использования маломощных ПЛИС, главным преимуществом которых является возможность проектирования реконфигурируемой системы и более быстрое наделение системы дополнительными функциями в зависимости от условий эксплуатации. Увеличение продолжительности автономного функционирования МО ГАНС достигается за счет использования аппаратно-программного изменения тактовой частоты.
Сущность изобретения поясняется чертежом, на котором представлена структурная схема приемопередающего устройства МО ГАНС.
Приемопередающее устройство МО ГАНС содержит приемопередающую ГА антенну 1, блок питания низковольтный 2, стабилизатор напряжения 3, усилитель входного сигнала 4, маломощный АЦП 5, усилитель выходного сигнала 6, маломощный ЦАП 7, блок питания высоковольтный 8, маломощная ПЛИС 9 с реализованными на ней интерфейсным блоком 9.1, одноканальным корреляционным приемником 9.2, многоканальным корреляционным приемником 9.3, таймером 9.4, схемой управления 9.5 и передатчиком 9.6, схема управления тактовой частотой 10.
Устройство работает следующим образом.
В режиме приема ГА сигнал поступает через приемопередающую ГА антенну 1 и усилитель входного сигнала 4 на маломощное аналого-цифровой преобразователь АЦП 5. После перевода в цифровое представление ГА сигнал поступает для обработки в маломощную ПЛИС на вход одноканального корреляционного приемника 9.2.
Зависимость потребляемой энергии в современных ПЛИС в большей степени зависит от тактовой частоты, поступающей с тактового генератора и в меньшей степени от объема занятой логики. Таким образом, в режиме прослушивания (при определении запускающей последовательности) ГА сигнал обрабатывается одноканальным корреляционным приемником 9.2 на пониженной частоте. Причем одноканальный корреляционный приемник 9.2 реализован по параллельно-конвейерной схеме для исключения потери в точности детектирования (приемник, таким образом, занимает больше ресурсов, чем в обычной реализации на высокой частоте).
При наличии запускающей последовательности от схемы управления 9.5 выдается сигнал на схему управления тактового питания 10 для повышения тактовой частоты. Включается режим определения команды и происходит запуск многоканального корреляционного приемника 9.3.
В течение времени Т (программируемого таймером 9.4) происходит определение командной последовательности с помощью многоканального корреляционного приемника 9.3. При детектировании командной последовательности в схему управления 9.5 через интерфейсный блок 9.1 поступает сигнал о достоверной регистрации и номер последовательности. Если во время поиска командной последовательности приходит еще одна запускающая последовательность, то происходит перезапуск таймера 9.4. По окончании времени Т с момента прихода последней запускающей последовательности от схемы управления 9.5 выдается сигнал на схему управления тактового питания 10 для понижения тактовой частоты, и маяк переходит в режим прослушивания ГА канала.
Формат команд ГА навигационного сигнала представляет собой пакет из двух последовательностей - общей запускающей и следующей за ней через определенный момент времени командной последовательности (количество командных последовательностей определяется объемом ПЛИС). Последовательности пакета представляют собой различные псевдослучайные последовательности одинаковой структуры (несущая частота, количество символов, число периодов на символ) с различными кодами.
Для снижения энергопотребления при длительных перерывах в работе схема управления тактового питания 10 включает или отключает питание маломощной ПЛИС 9 с определенным периодом на небольшой интервал времени (режим энергосбережения).
В режиме излучения на приемопередающую ГА антенну 1 через маломощный ЦАП 7 и усилитель выходного сигнала 6 поступает излучаемый сигнал от передатчика 9.6.
Блок питания низковольтный 2, стабилизатор напряжения 3, блок питания высоковольтный 8 обеспечивают питание низковольтных и высоковольтных частей МО ГАНС.
Таким образом, при реализации предложенного МО ГАНС увеличивается продолжительность его автономной работы и достигается большая функциональность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| Гидроакустическая навигационная система дальнего радиуса действия | 2022 |
|
RU2790937C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| Гидроакустический комплекс позиционирования и связи для навигационно-информационного обеспечения автономных необитаемых подводных аппаратов | 2023 |
|
RU2812089C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2477497C2 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| Способ приведения автономного необитаемого подводного аппарата | 2016 |
|
RU2616446C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАЧАЛЬНЫХ КООРДИНАТ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2016 |
|
RU2629916C1 |
Изобретение касается подводных исследований и может быть использовано в донных маяках-ответчиках гидроакустических систем навигации. Техническим результатом изобретения является увеличение продолжительности автономной работы и расширение функциональности. Маяк-ответчик гидроакустической навигационной системы включает приемопередающую гидроакустическую антенну, высоковольтный и низковольтный блоки питания, стабилизатор напряжения, усилители входного и выходного сигнала, маломощные аналого-цифровой и цифроаналоговый преобразователь, маломощную программируемую логическую интегральную схему с реализованными на ней интерфейсным блоком, одноканальным и многоканальным корреляционным приемником, таймером, схемой управления и передатчиком, дополнен схемой управления тактовой частотой. Расширение функциональности маяка-ответчика гидроакустической навигационной системы достигается за счет использования маломощных программируемых логических интегральных схем, главным преимуществом которых является возможность проектирования реконфигурируемой системы и быстрое наделение системы дополнительными функциями в зависимости от условий эксплуатации. Увеличение продолжительности автономного функционирования маяка-ответчика достигается за счет использования аппаратно-программного изменения тактовой частоты. 1 з.п. ф-лы, 1 ил.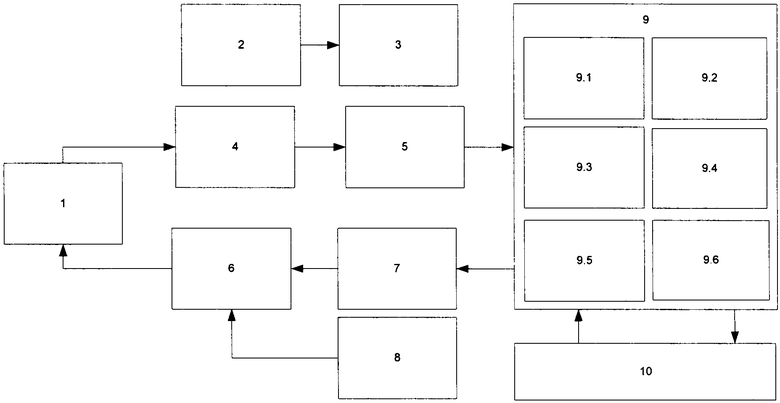
1. Маяк-ответчик гидроакустической навигационной системы, включающий приемопередающую гидроакустическую антенну, высоковольтный и низковольтный блоки питания, стабилизатор напряжения, усилители входного и выходного сигнала, маломощные аналого-цифровой и цифроаналоговый преобразователь, схему управления тактовой частотой, маломощную программируемую логическую интегральную схему с реализованными на ней интерфейсным блоком, одноканальным и многоканальным корреляционным приемником, таймером, схемой управления и передатчиком, отличающийся тем, что в него дополнительно введена схема управления тактовой частотой, которая позволяет изменять тактовую частоту и отключать питание программируемой логической интегральной схемы и тем самым понижать энергопотребление цифровой части маяка-ответчика гидроакустической навигационной системы, что позволит увеличить продолжительность автономного функционирования маяка-ответчика.
2. Маяк-ответчик гидроакустической навигационной системы по п.1, отличающийся тем, что приемопередающее устройство реализовано на базе маломощной программируемой логической интегральной схемы, позволяющей реализовать большую функциональность маяка и проектировать реконфигурируемую систему, которая может быть быстро наделена дополнительными функциями в зависимости от условий эксплуатации.
| RU 2058567 C1, 20.04.1996 | |||
| ГИДРОАКУСТИЧЕСКИЙ МАЯК-ОТВЕТЧИК | 1997 |
|
RU2125733C1 |
| RU 83341 U1, 27.05.2009 | |||
| Винтовой пресс для изготовления фибролитовых плит | 1932 |
|
SU33442A1 |
| US 2006215494 A1, 28.09.2006 | |||
| US 3673555 A, 27.06.1972. | |||

